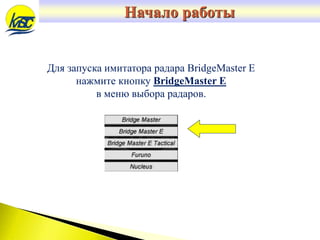
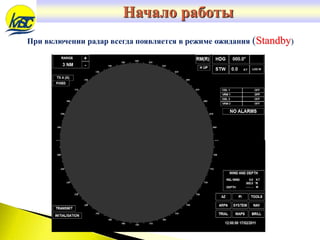
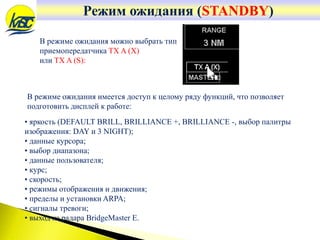
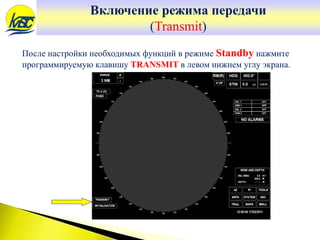
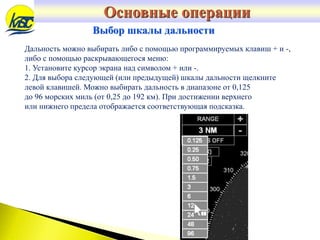
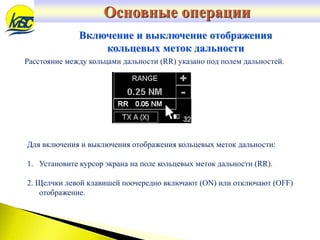
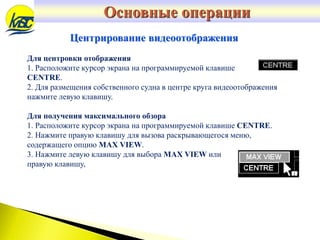
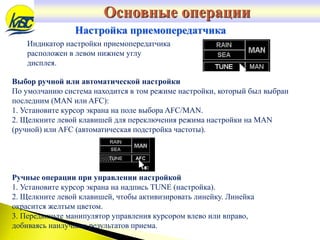
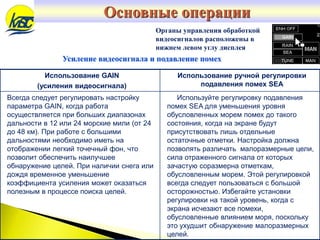
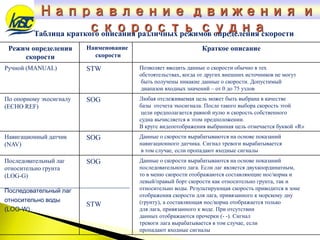
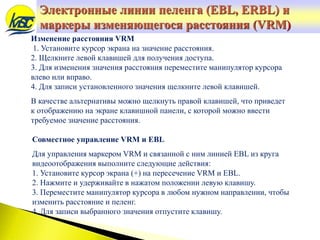
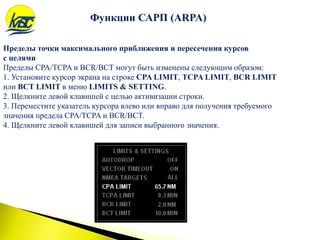
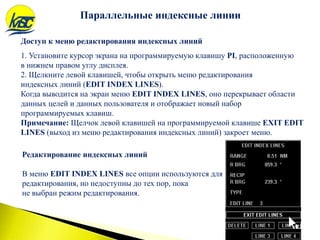
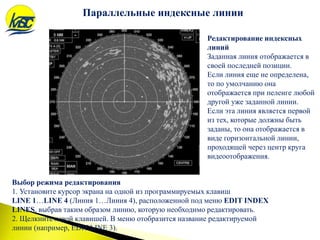
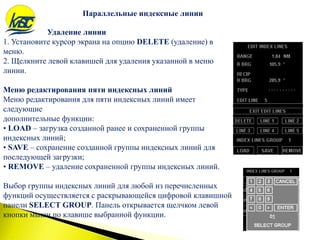
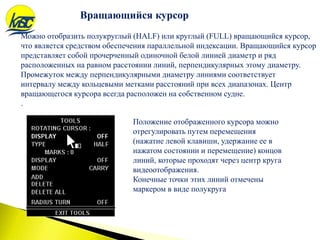
Документ описывает устройство и функции имитатора радара Bridgemaster E, включая процесс его запуска и управления. В нем представлены детали управления различными режимами работы радара, а также регулировками яркости и подавления помех. Также указаны методы работы с панелями управления, выбор шкал дальности и настройки параметров обработки видеосигналов.