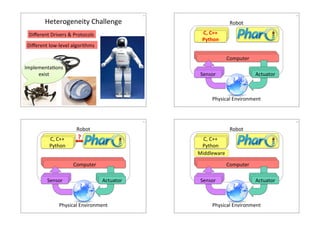
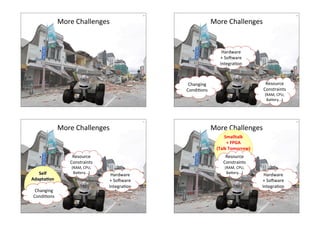
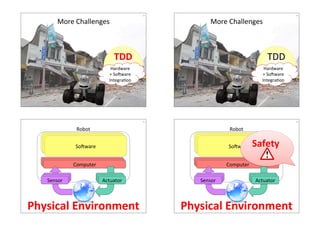
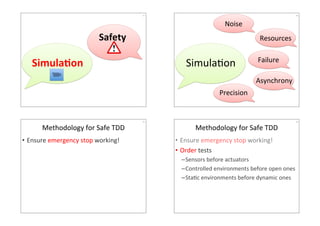
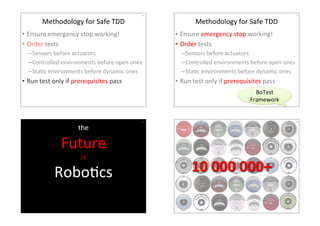
This document discusses challenges in robotics software development. It describes the heterogeneity of different robots with varying sensors, actuators, sizes, and computing capabilities. Developing software for multiple robot types poses difficulties with different drivers, protocols, and low-level algorithms. The document also outlines other challenges including resource constraints, hardware and software integration, changing conditions, and safety. It proposes a methodology for safe test-driven development of robotics software.










![[GTC 2019] Bringing Personal Robots Home: Integrating Computer Vision and Hum...](https://cdn.slidesharecdn.com/ss_thumbnails/s9360-bringingpersonalrobotshomefinalslides-190402004354-thumbnail.jpg?width=640&height=640&fit=bounds)

![[TOxAIA新竹分校] 工業4.0潛力新應用! 多模式對話機器人](https://cdn.slidesharecdn.com/ss_thumbnails/20181206004-181210031031-thumbnail.jpg?width=640&height=640&fit=bounds)
















![ESUG 2009: [Project planning], by Tim Mackinnon](https://cdn.slidesharecdn.com/ss_thumbnails/esug2009-planning-251028124040-b55d3034-thumbnail.jpg?width=640&height=640&fit=bounds)






































