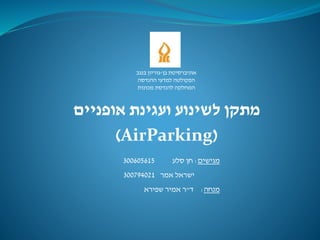
27. הבקרה מערכת תרשים
User Input
RF Module
transmitter
Arduino uno
VNH 5019 Motor
driver
RF Module
receiver
Multi - turn
potentiometer
DC Electric Motor
Digital Read Analog Read
PWM signal on
Pin 9 ,10
מטרות משנה:
העלאה והורדה של האופניים בבניינים ללא מעלית (עד 4 קומות).
אחסון האופניים על גבי המתקן מחוץ לכותלי הבית לתקופה בלתי מוגבלת עם אפשרות להכנסתם לדירה.
מתקן נייד, קומפקטי וקל להפעלה, בעל מחיר הגיוני ביחס לעלות אופניים סטנדרטיים.
הפעלת המתקן באופן אלחוטי.
מלבד העלאת אופניים, ניתן יהיה להשתמש במתקן להקלה על פעולות יומיומיות פשוטות נוספות כגון: העלאת קניות, חפצים קלים וכו'.
קהל היעד העיקרי המשתמש באופניים באופן יומיומי הם
אנשים צעירים החיים בעיר התוססת והצפופה. בערים אלו צפיפות הבניינים גדולה מאוד ולרוב מדובר בבניינים ישנים, ברובם ללא מעלית ושטח דירה קטן.
על פי בדיקתנו, בבאר שבע בלבד ישנם כ-30 אלף דירות השוכנות בבניינים ללא מעלית. הנתונים דומים גם לערים נוספות בארץ כגון ראשל"צ,חולון,בת ים,ת"א,ר"ג וכו'.
להרחיב מה זה step through ו-diamond frame בעזרת התמונה בעמוד הקודם.
אורך ה- Top tubeהוא הפרמטר המשתנה בצורה הנמוכה ביותר בין סוגי האופניים (בין 40-70 ס"מ)-להראות
מרכז המסה של האופניים (ללא הרוכב) נמצא בין הכיסא לכידון .
להסביר שהמסקנה נובעת מחוק ממשלתי: כל בניין בין 4 קומות ומעלה שנבנה לאחר שנת 1974 יחויב בהתקנת מעלית. 17 מ'-3.4 מטר לקומה
המכשולים לאורך הבניין בולטים עד למרחק של 0.75 מטר משפת המבנה. בכדי להבטיח
שלא תהיה פגיעה באחד מהמכשולים נרחיק את האופניים למרחק של כמטר משפת המבנה.
ע"פ מכון התקנים עומס אנכי מקסימאלי אפשרי על המעקה הוא 750 ניוטון למטר. המשמעות היא כי המשקל על המתקן כולל האופניים יהיה קטן מ 75 ק"ג .
*ע"פ תקן ישראלי ת"י 1142.
ע"פ תקן למתקני הרמה כבל ההרמה צריך להיות בעל חוזק למתיחה גדול פי 6 מהעומס הרצוי להרמה.
*ע"פ תקן ישראלי ת"י 1158.
נרצה לתכנן את המתקן להיות אוניברסאלי לכן נתכנינו לטווח טמפ' רחב: -20C-50C.
על המתקן להיות עמיד בלחות ומשקעים וברוח מקסימאלית של 30 קמ"ש (רוח בינונית).
כהכנה לפרויקט היה צורך למדל את כל העצמים המתממשקים למתקן:
האופניים- משקלים,מידות, ומיקום מרכז המסה.
המבנה- סוגי המבנים אליהם המתקן מיועד, מיקומו בדירה.
תנאי הסביבה בהם המתקן נדרש לעבוד.
אוכלוסיית יעד.
כיום ישנם מספר מוצרים בשוק אשר נותנים מענה חלקי לחלק מהבעיות אשר פורטו לעיל.
קיימים מנעולים רבים בשוק אשר נותנים מענה לגניבת האופניים, אך אלו אינם מבטיחים בטחון מלא בפני גניבות של חלקי אופניים שאינם נעולים (כגון גלגל ,סוללה ,כיסא וכו').
לבעיית אחסון האופניים בדירה ישנם מספר מוצרים אשר מנסים לצמצם את תפיסת הנפח החיוני בדירה. מוצרים אלו לא תפסו תאוצה רבה בשוק שכן עדיין אינם פותרים את בעיית מיקום האחסון בדירות קטנות, ומתאימים בעיקר לדירות בהן יש חדרים פנויים להתקנתם.
עכשיו נראה את התהליך שעברנו והדרך ההנדסית מהחלופות ועד הפתרון הסופי בסרטון
התחלנו בשלב הSRR להרכבת דרישות המערכת
אחרי שלב הSRR עברנו לשלב הPDR- סקר תיכון ראשוני.
\\חסרונות:
בעיה בקיפול הזרועות, פתיחת הזרועות יקרה ומסובכת כיוון ויש ליצור קפיץ יעודי להתאמה למידות.
דגם יקר המתוכנן מאלומיניום
כליבה הנוצרת בין פרק לפרק טלסקופי
המתקן נורא כבד בעקבות הפלטות
הרבה חלל לא מנוצל בדגם
חן
חסרונות:
קשה לפתוח את הזרועות בצורה סימטרית באותו זמן
תמסורת גלגלש טובה אך נחשבת כבזבזנית בהספק על חום וקשה לייצור עצמי.
אין מוט תמיכה המקל על המומנט הופעל על המעקה.
חן
יתרונות:
הזרועות נפתחות ונסגרות בצורה סימטרית, קלות, במצב סגור הזרועות באורך 14 ס"מ ופתוח 110 ס"מ. ניתן לשלוט על מרחק הפתיחה.
תיבת תמסורת-קלה לתפעול, אין צורך בהתאמת הגלג"שים.
מתקן תלייה קל יחסית
מוט תמיכה המוריד עומס מהמעקה.
ניצול מקום מקסימאלי. דגם קל וקטן ומעוצב יותר.
חן
חן
להגיד שפה נכנסנו לשלב ה-CDR סקר תיכון קריטי.
5 מכלולי תכן ומכלול חשמל ובקרה.
ניסינו לתכנן את הדגם במינימום סוגי ברגים
שלדה קלה (ניתן להוריד משקל מהשלדה השוקל כ-3ק"ג).
השלדה צופתה בחומר אדיש לקורוזיה.
כל המכלולים כולל מתקן התלייה מחוברים לשלדה אשר מספקת את החוזק למערכת.
ניסינו לגרום לכל מוטות השלדה להימצא במתיחה/לחיצה ולא בכפיפה.
אנליזה חושבה בעומס של 200 ניוטון על זרוע.
משקל זרוע כ-2.2 ק"ג.
החלק בו צצו רוב בעיות המערכת (כליבה,חיבור בX,פתיחת הזרוע,פתיחת הברגים). הבעיות נבעו מבניה שלא ע"פ התכנון, אפיצויות לא נכונות
ואוריינטציה שגויה של הזרוע.
נפתחת מכוח קפיץ (התבצע ניסוי), יתכן שבעתיד בעזרת בורג דחיפה. נסגרת מכוח המנוע בעזרת הזוויתן.
שומר על מרכז המסה בין שני הרתמים.
התאמה לכל סוגי האופניים- תופ טיוב מ-40-70 ס"מ.
חישוב:
חישבנו ע"פ משקל העמסה של 350 ניוטון והנחנו ש F1=F2.
חישבנו עבור l1 מקסימאלי ומינימאלי. יצא מומנט גבוה יותר כאשר l1 מינימאלי, יעני אופניים גדולות.
במקרה הזה M מקסימאלי שווה 113 ניוטון מטר.
לאחר מכן חישבנו מאמץ מקסימאלי לכפיפה.
תוכנן להיות חזק וקל.
מחובר לשלדה המקנה את החוזק.
מתחבר בעזרת בורגי M16 למעקה.
להזכיר כי התחלנו את החישובים מהמנוע, לפיו התאמנו את תיבת התמסורת והציר.
נדרשת מערכת סידור כבל אשר לא הספקנו להכין.
תיבת התמסורת סופגת את הכוח האקסיאלי.
Kf=1.4
מקדם ביטחון 1.2
Af-מקדם סוג העמסה (כפיפה)
Bf-אם הציר גדול או קטן מ8 מ"מ (גדול)
Cf –מקדם סוג עיבוד (ע"ש)
בכבל 19*7 שבחרנו ישנו יחס של 1:24 בין רדיוס הכבל לרדיוס הכפיפה המינימאלי.
תופים עשויים ABS.
להסביר מה זה ריצת הסטאפ ולמה נועדה
לצלם את הפוטנציומטר של המנוע ולהוסיף
כאשר נתקין את המערכת נריץ את ריצת הסטאפ אשר באה בעצם ללמד את המערכת את האורך שהיא אמורה לשחרר
בזמן שינוע.
באמצעות הפוטנציומטר המותקן על המנוע המערכת מסוגלת לספור סיבובי מנוע
כאשר מתקינים את המתקן ומפעילים אותו במצב סטאפ בעת שנחלץ על כפתור D המערכת תתחיל לשחרר חוט
כול עוד נלחץ.
ברגע שנשחרר את הכפתור למשך יותר מחמש שניות המערכת תשמור את מספר הסיבובים שהיא עשתה ובכך תדע את אורך החוט
שעליה לשחרר
באמצעות קריאה של הפוט' אנו יודעים את המהירות, בעת חרגיה מהמהירות המותרת מופעל בלם המנוע ומנותק הזרם למנוע.
בלימה עצמית מתקבלת בתמסורת חלזונית מיחס של 1:10 בעקבות נוכחנו לדעת כי 1:5 איננה בלימה עצמית מלאה אך מקשה מאוד על המערכת
הבלימה מתקבלת כאשר זווית החיכוך קטנה מזווית הליד
להציג את בעיית המנוע. (נוסה בלי תיבת התמסורת ולכן מרים משקל נמוך מבניסויים .
לדבר על הזרועות
תכן אשר ידידותי למרכיב
התחלנו את הפרויקט עם רעיון בלבד, ולאחר 9 חודשי עבודה אינטנסיביים בנינו
מודל ממשי אשר משנע אופניים ועונה על רוב הדרישות אותן הצבנו.
מלבד תכן ובקרה למדנו רבות במהלך הפרויקט על תהליכי ייצור,
תקציבים, הכנת לוחות זמנים, הכנת תוכנית הנדסית ובעיקר הבנו את
השיקולים העומדים בפני מהנדס מכונות בפרויקט הנדסי.