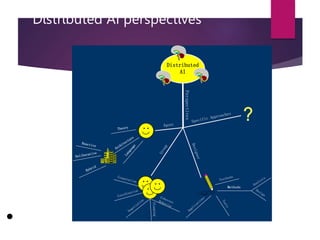
The document discusses intelligent agents and related concepts. It begins by defining agents based on general definitions from dictionaries and literature. It then provides more specific definitions of intelligent agents from various sources. The document distinguishes between weak and strong notions of agency. It also compares and contrasts agents with objects and expert systems. The document discusses different types of environments that agents can operate in and how this impacts agent design. It concludes by discussing distributed artificial intelligence and multi-agent systems at a high level.



![Type of environment
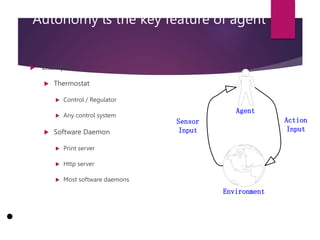
An agent will not have complete control over its environment, but have
partial control, in that it can influence it.
Scientific computing or MIS in traditonal computing.
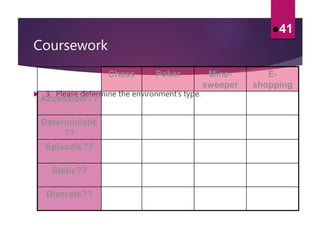
Classification of environment properties [Russell 1995, p49]
Accessible vs. inaccessible
Deterministic vs. non-deterministic
Episodic vs. non-episodic
Static vs. dynamic
Discrete vs. continuous
11](https://image.slidesharecdn.com/agents1-221110092255-8830a73c/85/Agents-1-ppt-11-320.jpg)