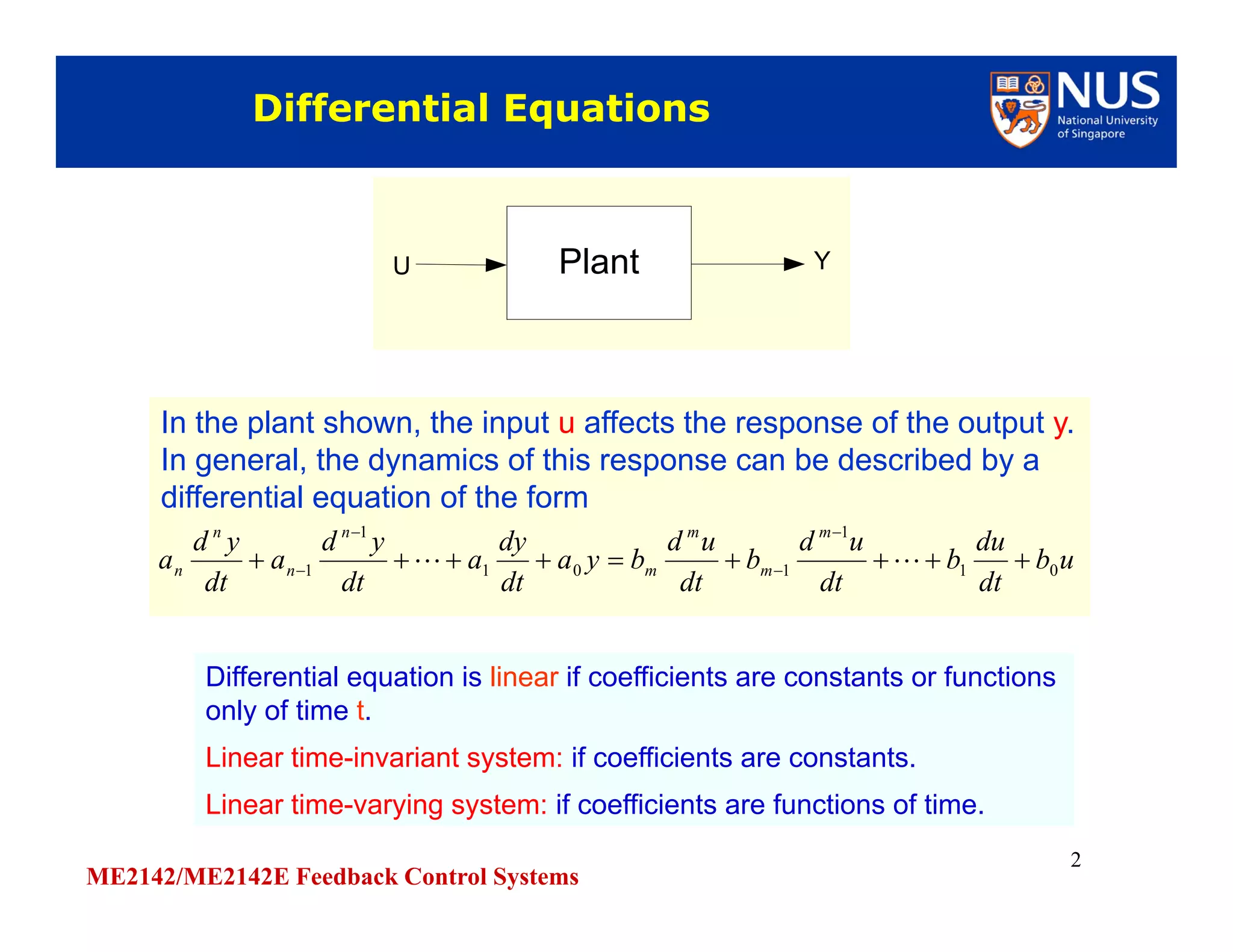
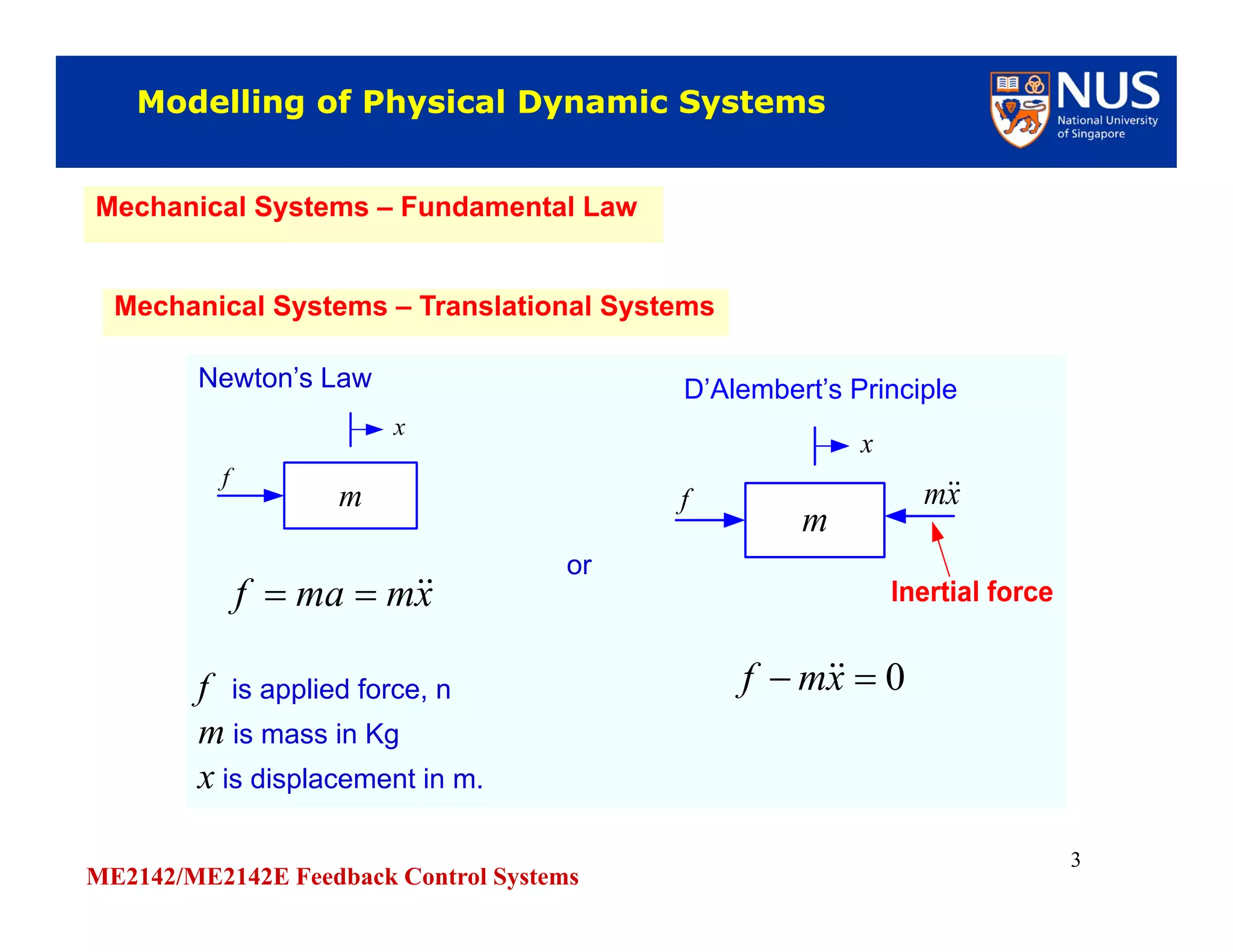
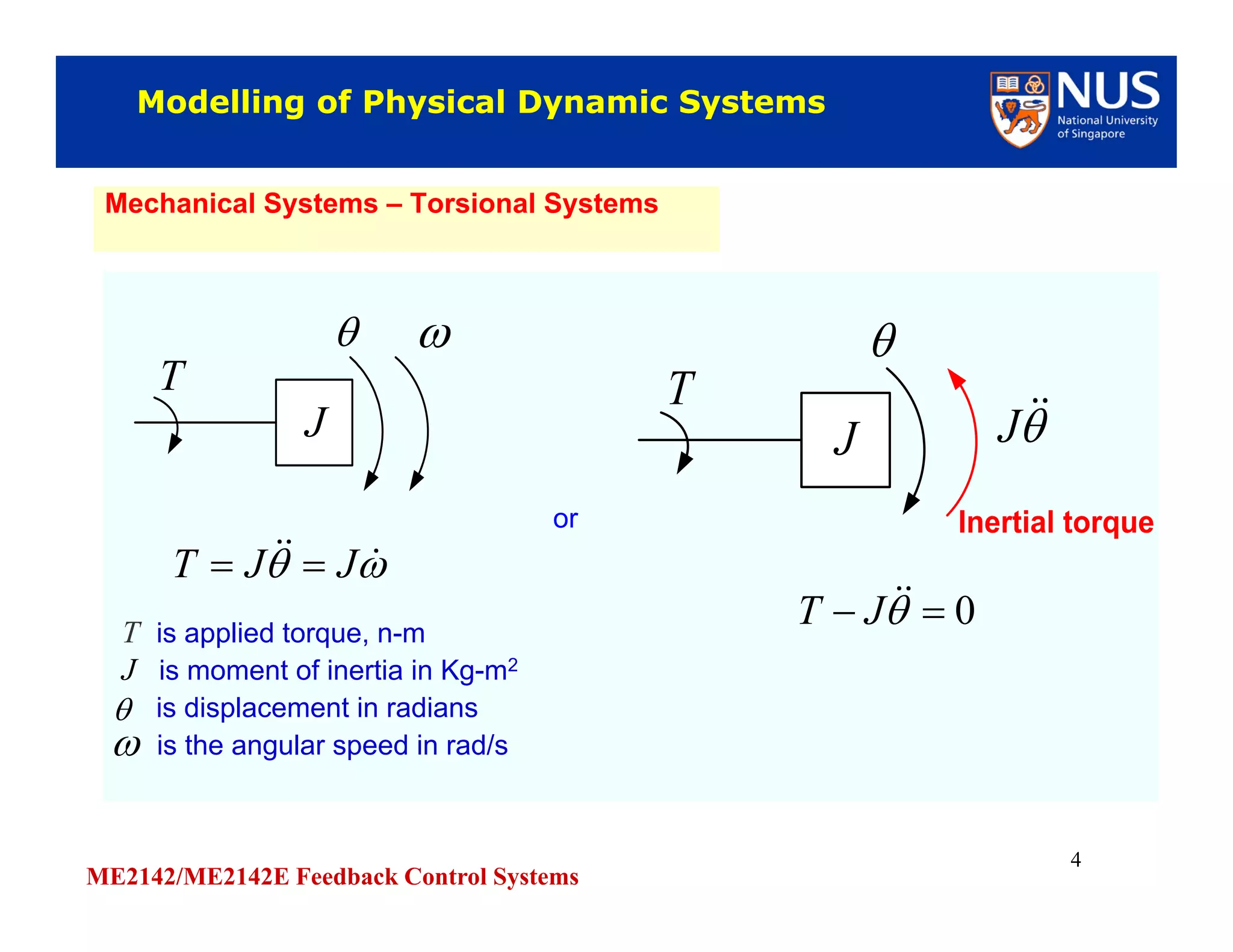
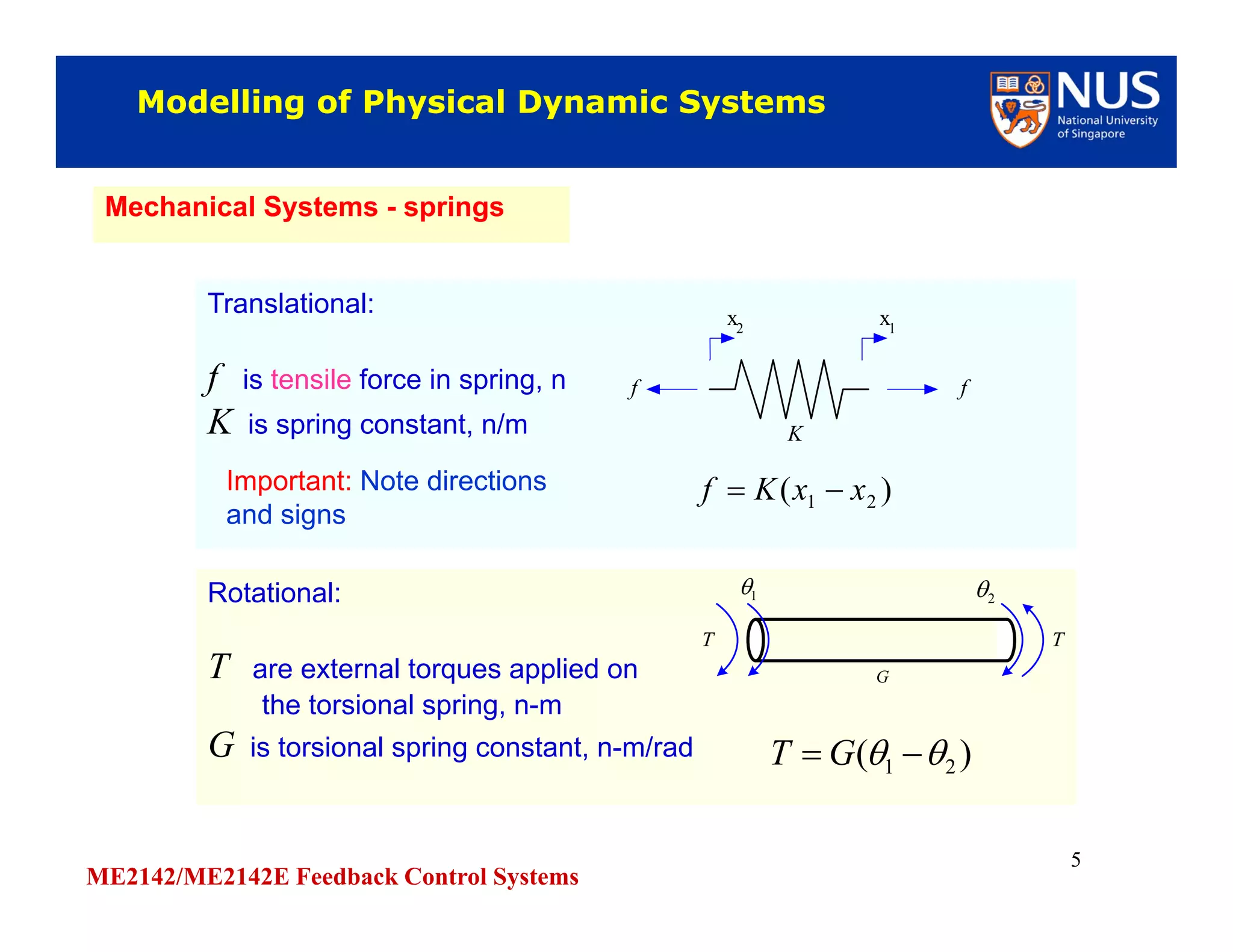
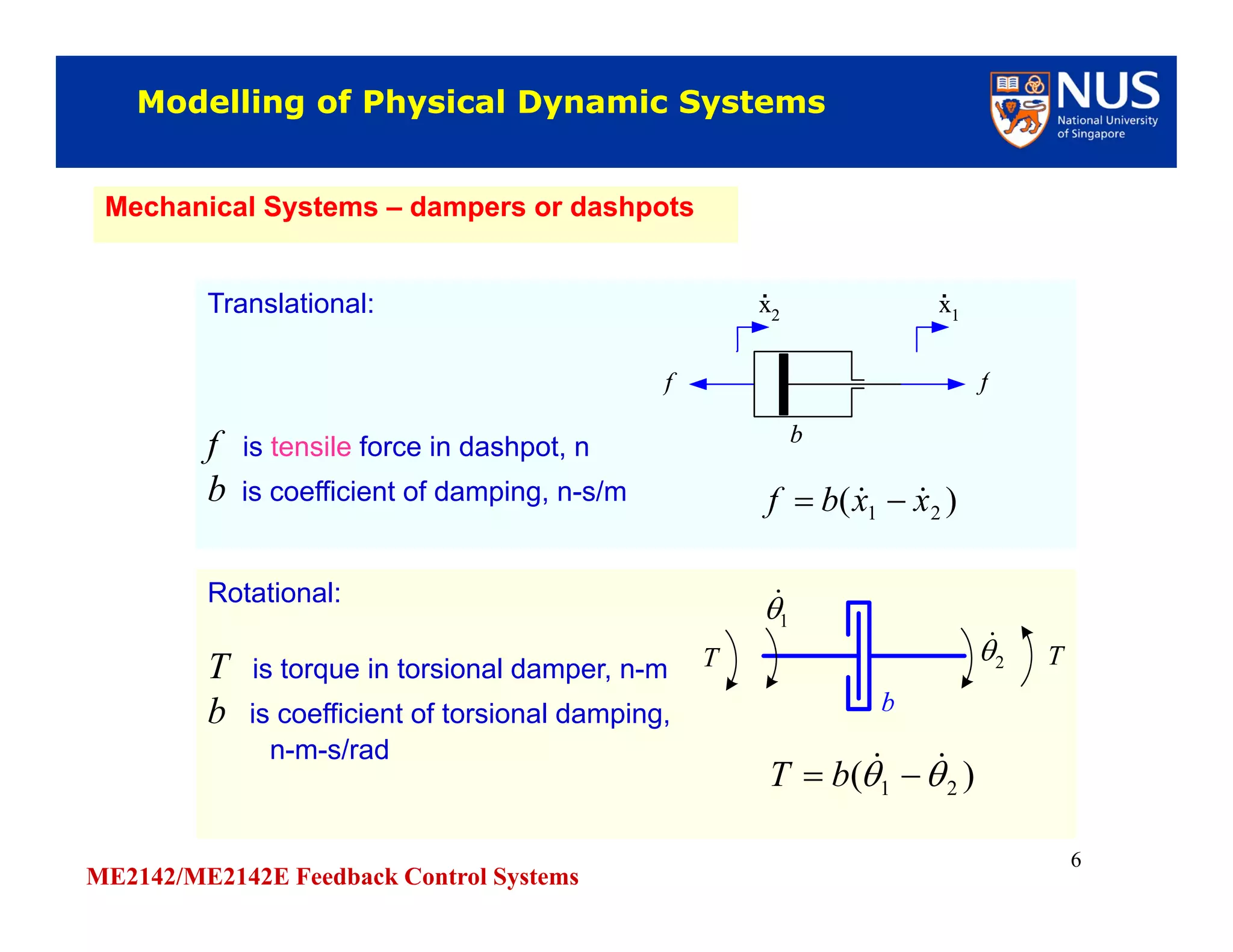
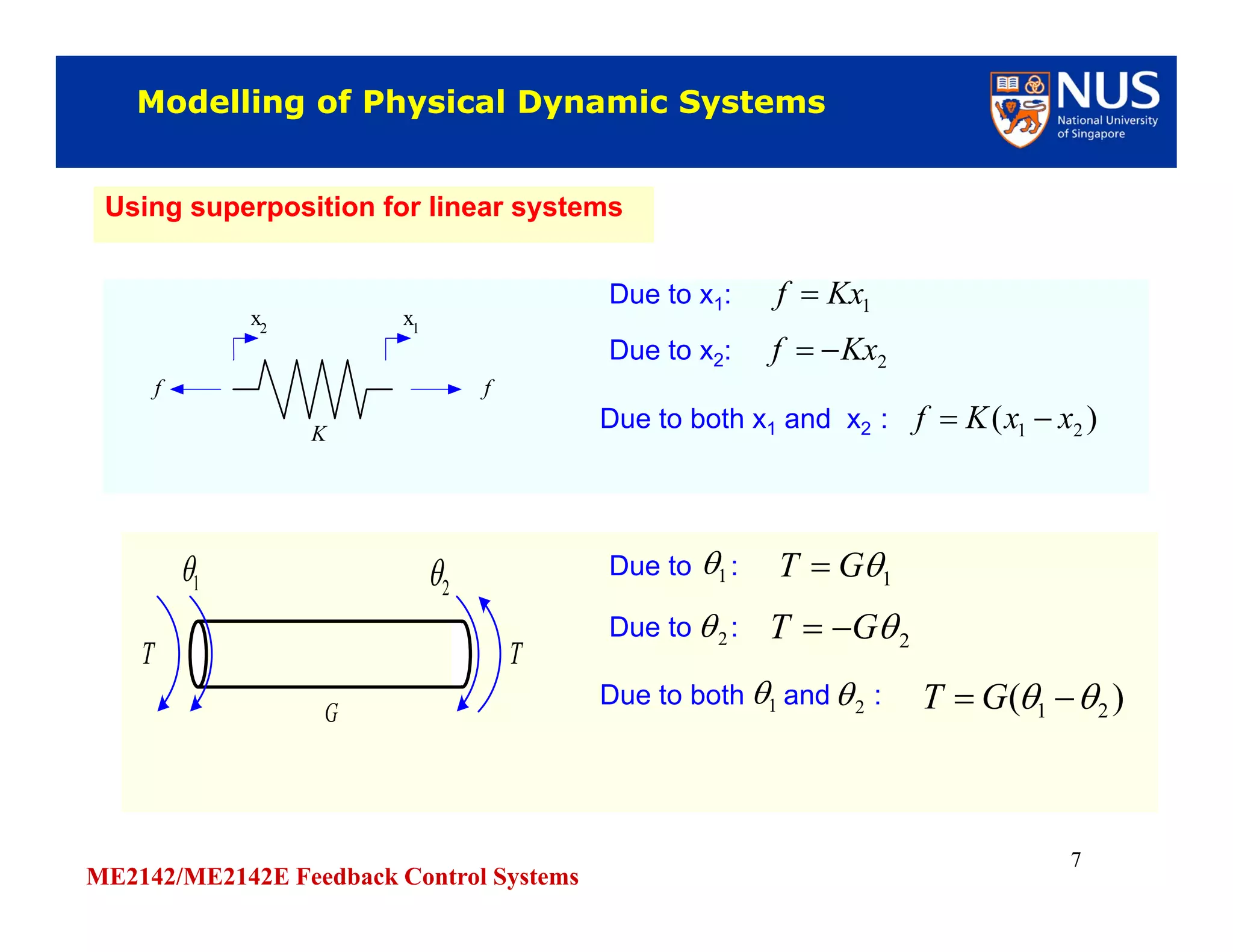
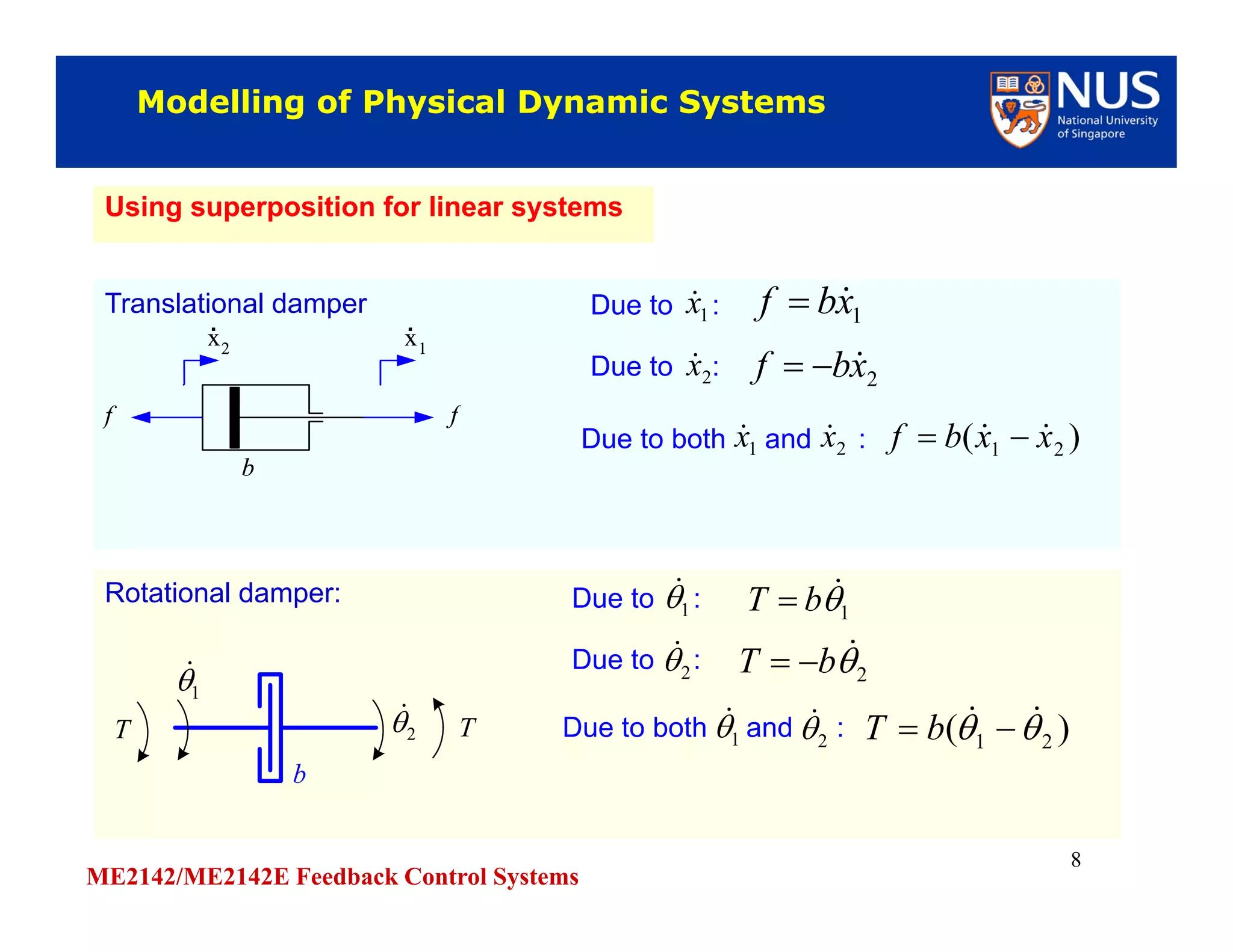
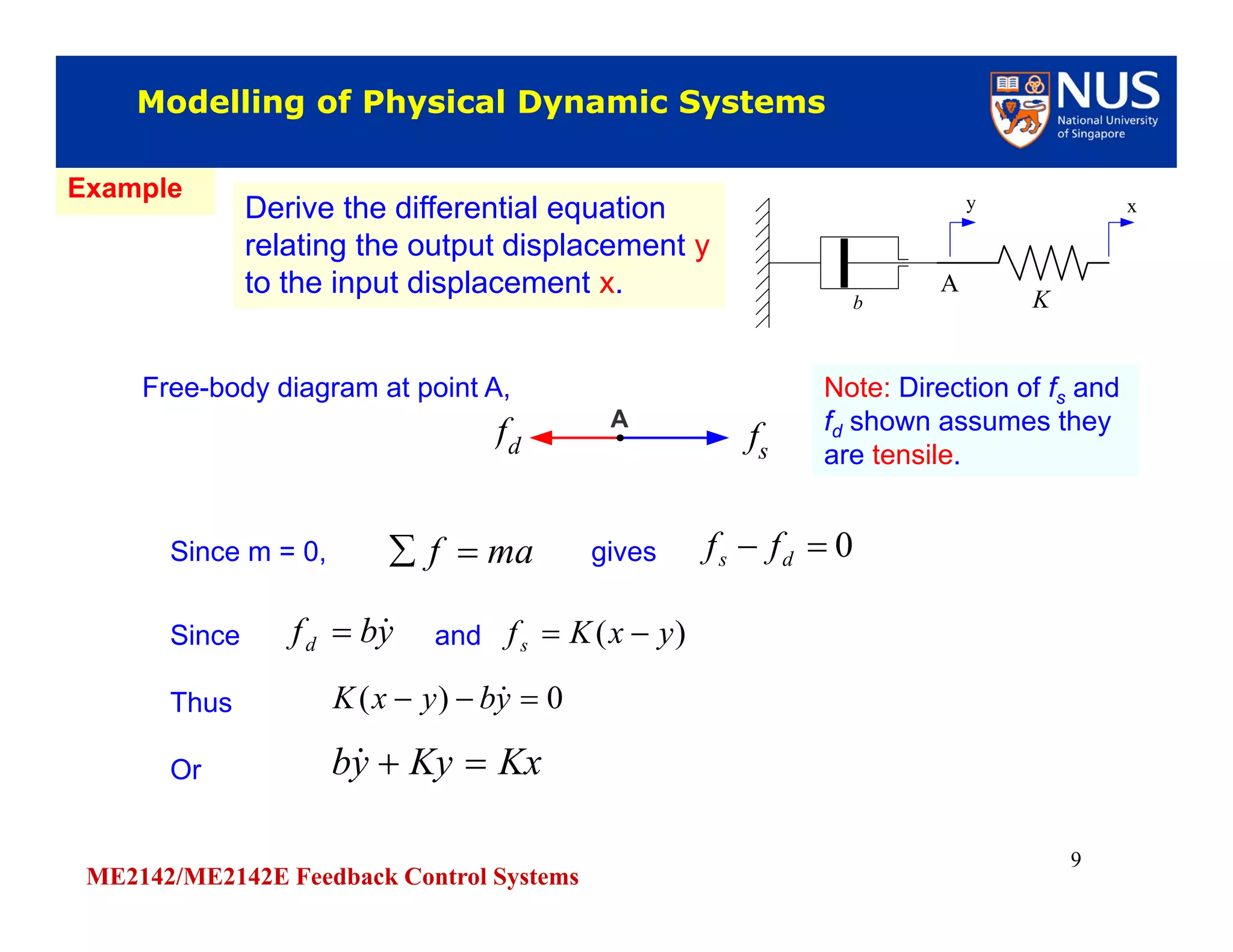
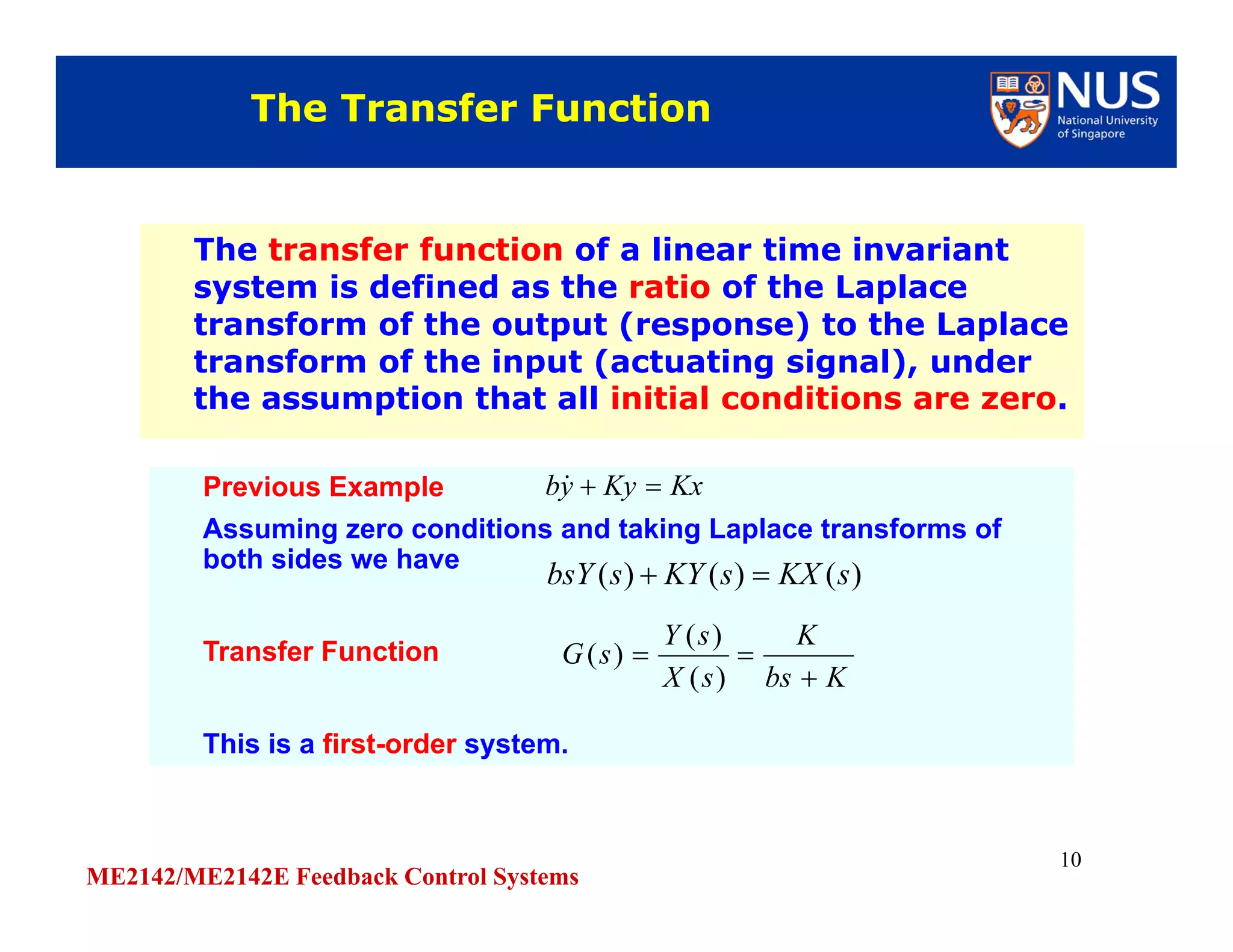
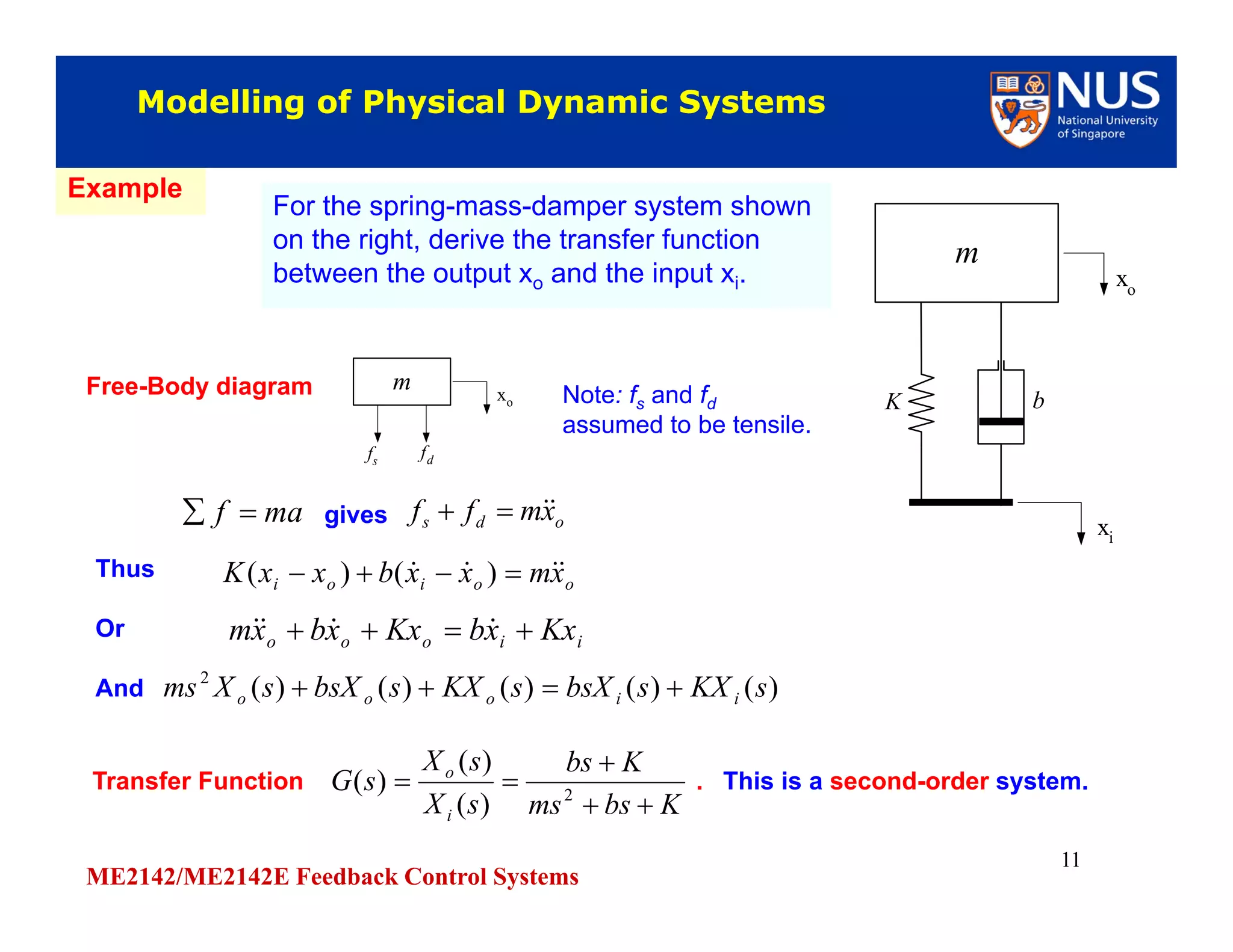
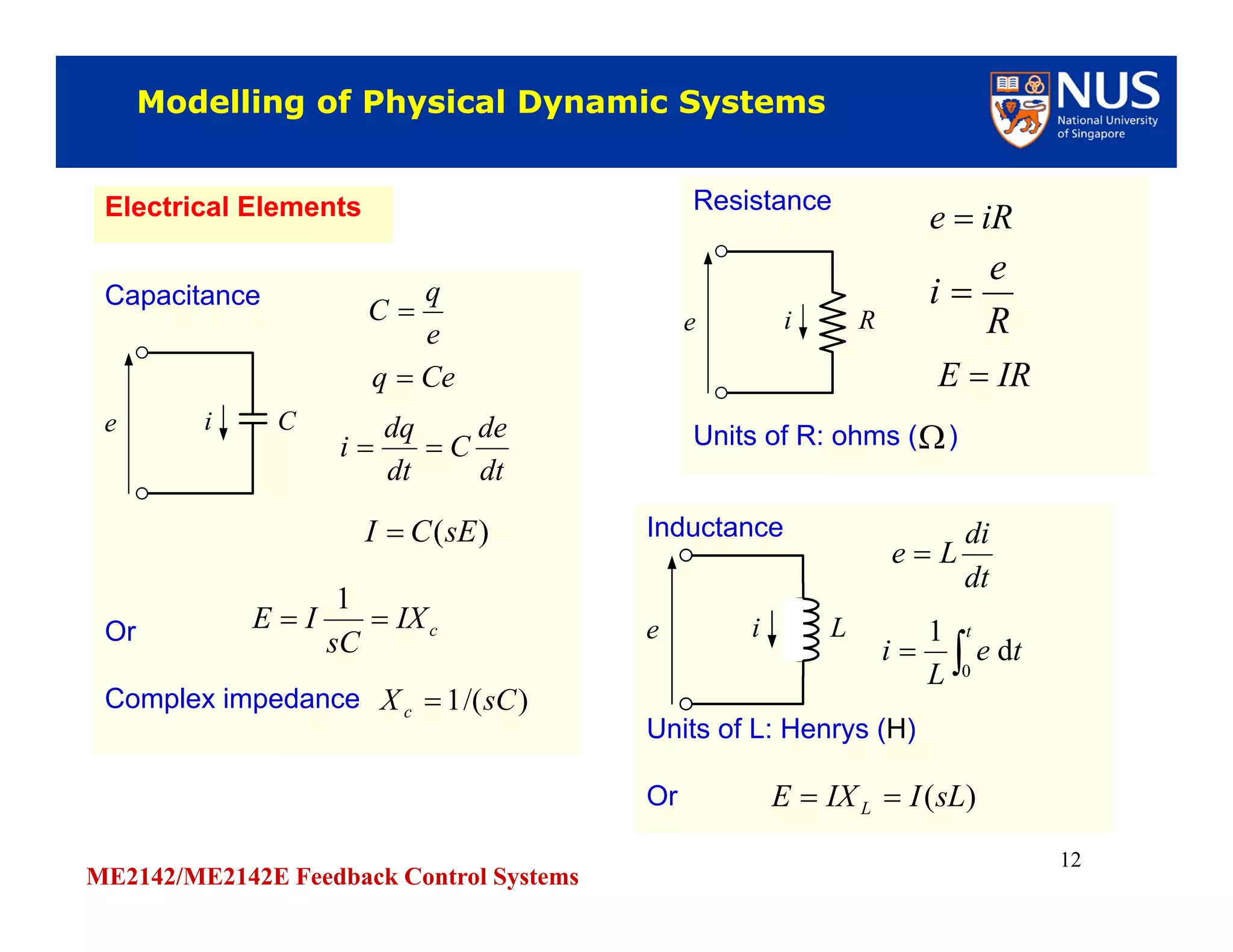
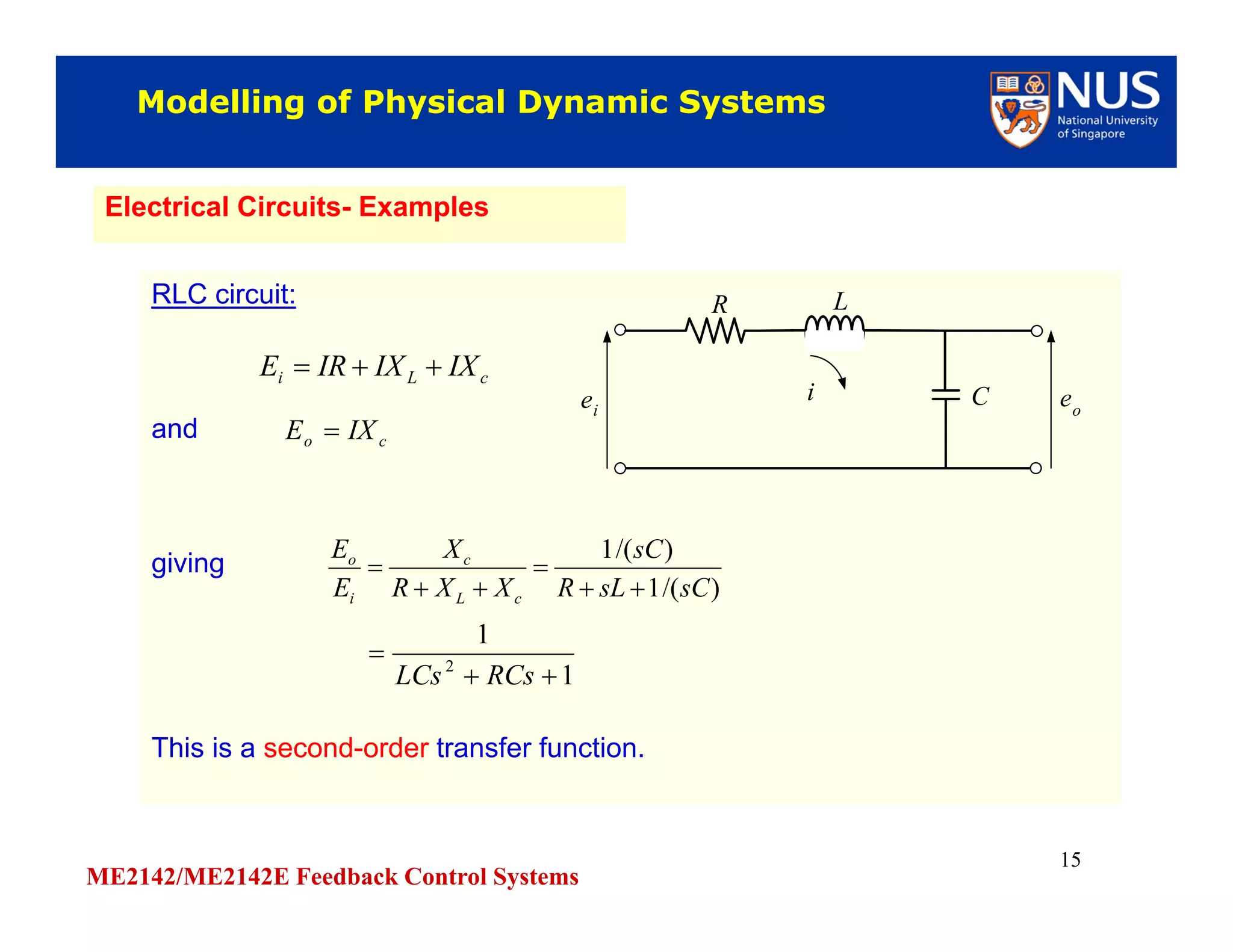
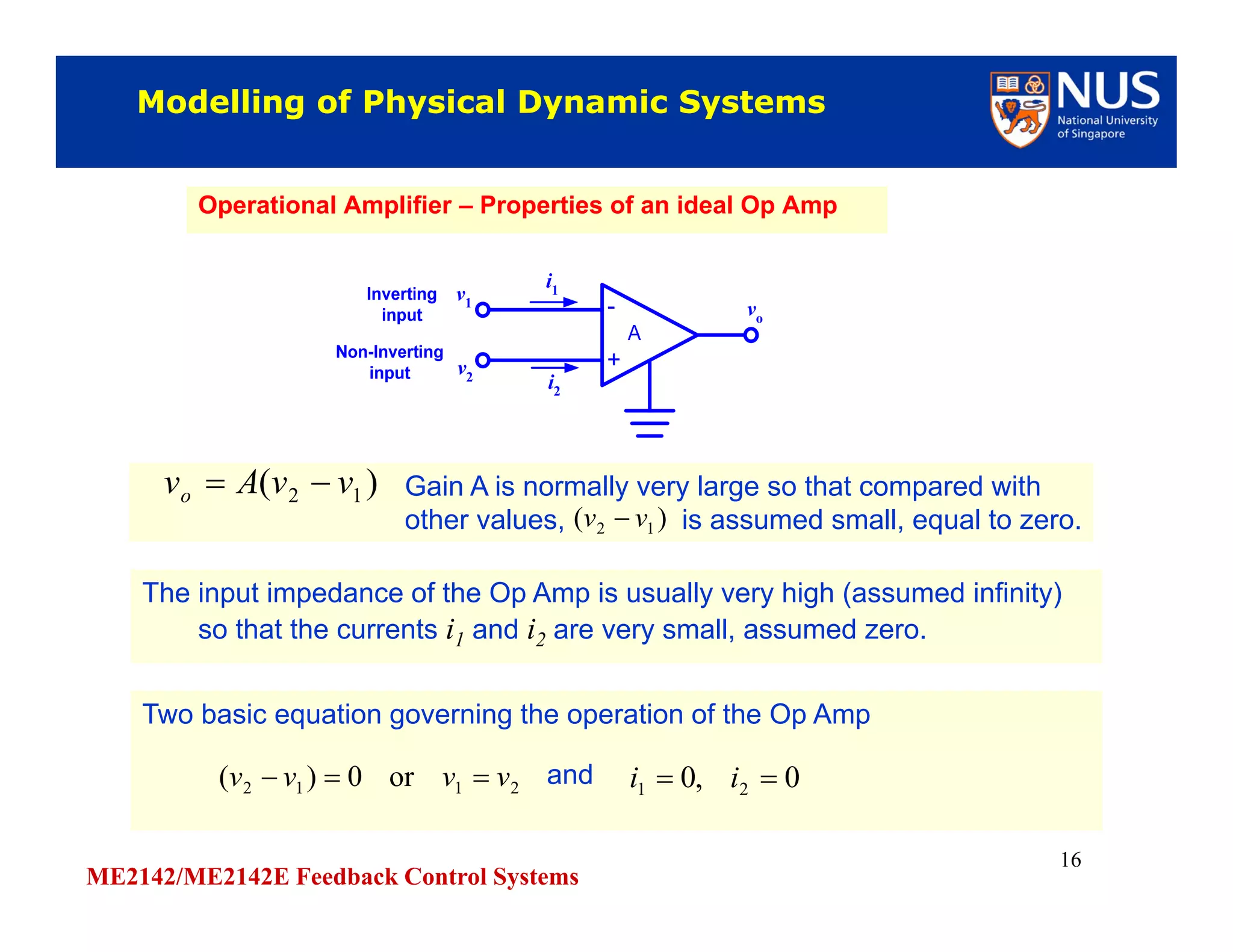
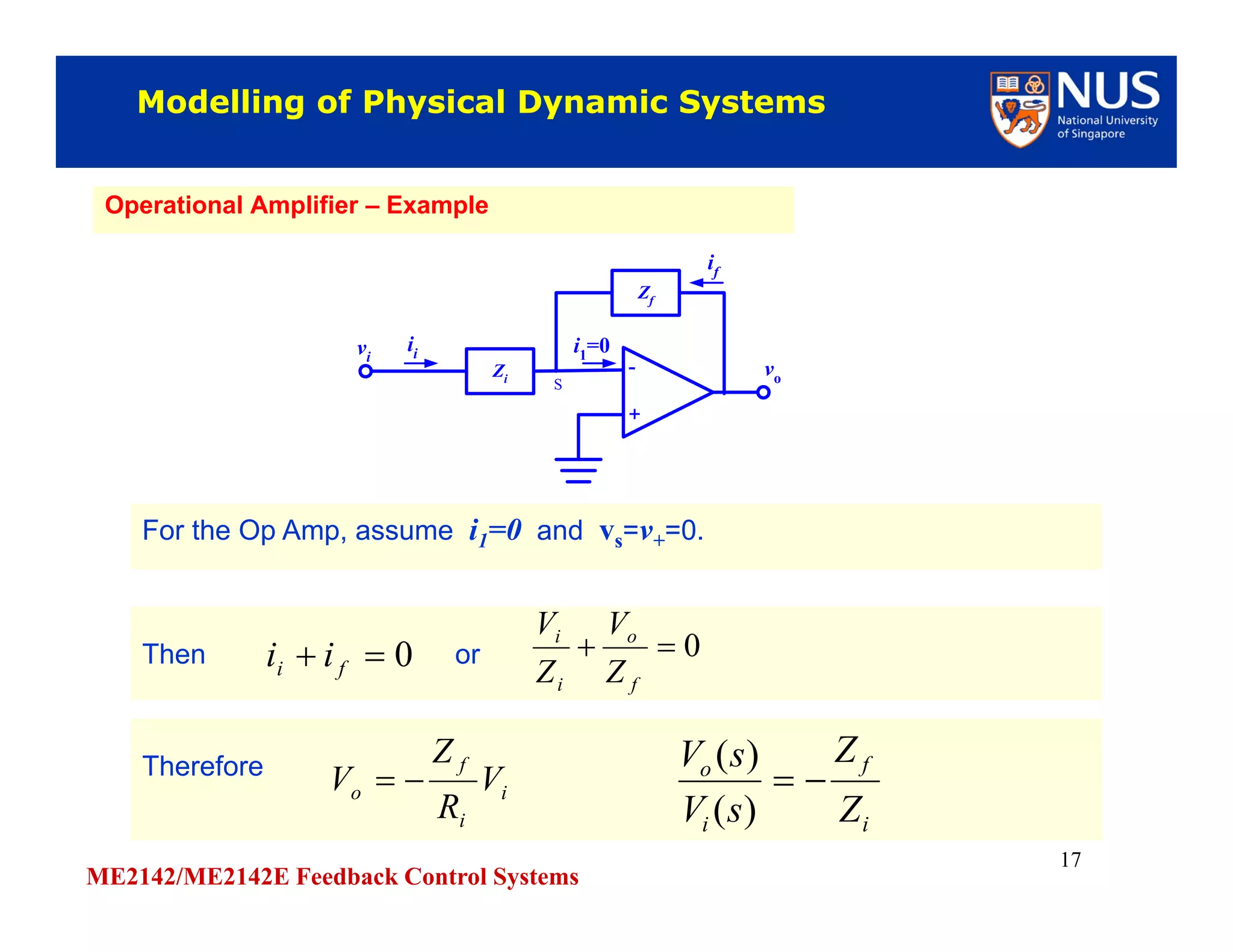
This document discusses modelling of physical systems and their transfer functions. It covers modelling of mechanical systems using Newton's laws and differential equations to describe translational and rotational motion. Electrical elements like resistors, capacitors, and inductors are also covered. Kirchhoff's laws are discussed for analysing electrical circuits. Operational amplifiers and examples of modelling RC, RLC circuits and a dc motor driving a load are provided to demonstrate obtaining transfer functions of physical systems.






























































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)







