Apostila de geometria analítica
•
6 likes•7,620 views

Este documento fornece um resumo conciso de três frases ou menos: O documento apresenta um resumo de uma apostila sobre Geometria Analítica Plana, introduzindo os principais tópicos abordados como sistemas de coordenadas, distância entre pontos, equações de retas e circunferências, seções cônicas e transformação de eixos coordenados.

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (20)
Similar to Apostila de geometria analítica
Similar to Apostila de geometria analítica (20)
Recently uploaded
Recently uploaded (20)
Apostila de geometria analítica
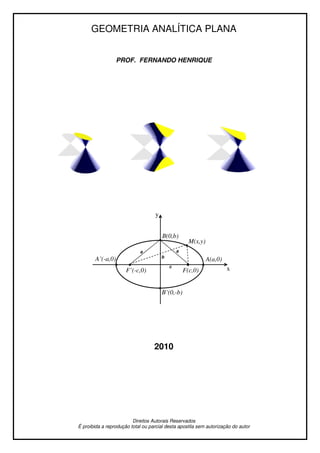
- 1. GEOMETRIA ANALÍTICA PLANA PROF. FERNANDO HENRIQUE 2010 Direitos Autorais Reservados É proibida a reprodução total ou parcial desta apostila sem autorização do autor y B’(0,-b) M(x,y) x A’(-a,0) A(a,0) B(0,b) F’(-c,0) F(c,0) a b c a y
- 2. GEOMETRIA ANALÍTICA PLANA 2 Ao Aluno, Caro aluno. Esta apostila foi elaborada com o propósito de otimizar e facilitar o acompanhamento da primeira parte do programa da disciplina Geometria Analítica ministrada nos cursos de engenharia da FEA-FUMEC. Por se tratar de um assunto extenso e complexo, foram aqui omitidas algumas formalidades matemáticas com o intuito de tornar o texto mais amigável possível, sem perder a lógica e o rigor necessários. Contudo é desejável que você tenha acesso a outras bibliografias relacionadas ao assunto, algumas das quais serão indicadas em sala de aula. Espero que este texto o ajude no entendimento e assimilação desta fantástica ferramenta matemática que é a Geometria Analítica. “Um conhecimento básico em matemática e boa vontade são pré-requisitos para o estudo desta disciplina.” Bons estudos. Belo Horizonte, julho de 2009.
- 3. GEOMETRIA ANALÍTICA PLANA 3 Introdução O que é Geometria Analítica....................................................................... 4 Capítulo 1 Espaços dimensionais; Sistemas de referência; Sistema de coordenadas retangulares.......................................................................... 4 1.1 Espaços dimensionais................................................................................... 4 1.2 Sistemas de referência para R²..................................................................... 5 1.3 O sistema de coordenadas retangulares....................................................... 6 Capítulo 2 Distância entre dois pontos; Coordenadas do ponto médio................... 8 2.1 Distância entre dois pontos............................................................................ 8 2.2 Coordenadas do ponto médio........................................................................ 10 2.3 Exercícios propostos...................................................................................... 13 Capítulo 3 Retas em R²; Coeficiente angular; Equações da reta; Interseção de retas; Paralelismo; Perpendicularismo; Ângulo entre duas retas; Distância entre ponto e reta........................................................................ 15 3.1 Retas em R²................................................................................................... 15 3.2 Coeficiente angular........................................................................................ 15 3.2.1 Coeficiente angular através de dois pontos................................................... 18 3.3 Equações da reta........................................................................................... 21 3.3.1 Equação da reta em função de dois pontos.................................................. 21 3.3.2 Equação da reta em função do coeficiente angular....................................... 22 3.3.3 Equação reduzida.......................................................................................... 23 3.3.4 Equação segmentária.................................................................................... 23 3.3.5 Equação geral................................................................................................ 24 3.4 Interseção de retas......................................................................................... 26 3.5 Paralelismo..................................................................................................... 27 3.6 Perpendicularismo.......................................................................................... 27 3.7 Ângulo entre duas retas................................................................................. 29 3.8 Distância entre ponto e reta........................................................................... 30 3.9 Exercícios propostos...................................................................................... 32 Capítulo 4 Circunferência.............................................................................................. 35 4.1 Definição........................................................................................................ 35 4.2 Equação da circunferência............................................................................ 36 4.3 Equação geral da circunferência................................................................... 37 4.4 Identificando o centro e o raio na equação geral da circunferência............... 38 4.5 Exercícios propostos...................................................................................... 40 Capítulo 5 As Seções Cônicas...................................................................................... 42 5.1 Elipse.............................................................................................................. 43 5.1.1 Elementos da elipse....................................................................................... 43 5.1.2 Equação reduzida da elipse........................................................................... 45 5.1.3 Equações reduzidas genéricas da elipse....................................................... 46 5.1.4 Excentricidade................................................................................................ 48 5.1.5 Exercícios propostos...................................................................................... 50 5.2 Hipérbole........................................................................................................ 52 5.2.1 Elementos da hipérbole.................................................................................. 53 5.2.2 Equações reduzidas genéricas da hipérbole................................................. 54 5.2.3 Excentricidade................................................................................................ 56 5.2.4 Exercícios propostos...................................................................................... 59 5.3 Parábola......................................................................................................... 61 5.3.1 Elementos da parábola.................................................................................. 62 5.3.2 Equações reduzidas genéricas da parábola.................................................. 63 5.3.3 Exercícios propostos...................................................................................... 66 Capítulo 6 Translação de eixos coordenados............................................................. 68 6.1 Objetivo.......................................................................................................... 68 6.2 Relação entre os sistemas XoY e X’o’Y’........................................................ 71 6.3 Exercícios propostos...................................................................................... 74 Capítulo 7 Noções do sistema de coordenadas polares............................................ 76 7.1 Introdução...................................................................................................... 76 7.2 Elementos...................................................................................................... 77 7.3 Relação entre os sistemas cartesiano e polar............................................... 78 Apêndice I Álgebra.......................................................................................................... 81 Apêndice II Fórmulas Trigonométricas.......................................................................... 82 Apêndice III Geometria...................................................................................................... 83 Apêndice IV Seções Cônicas............................................................................................ 85 Descartes ........................................................................................................................ 88 Bibliografia ........................................................................................................................ 89
- 4. Introdução O que é Geometria Analítica? O estudo da geometria é um assunto que fascina os matemáticos desde a antiguidade. É provável que a própria matemática tenha surgido impulsionada pela necessidade do entendimento de problemas cotidianos, de povos antigos, relacionados à geometria. Existem vários ramos de estudo da geometria como a geometria projetiva, geometria descritiva e geometria analítica. A Geometria Analítica é considerada por muitos autores como sendo um método de estudo de geometria. A Álgebra é a ferramenta utilizada no estudo de geometria através da Geometria Analítica. Na essência, a Geometria Analítica consiste na transformação de problemas geométricos em problemas algébricos correspondentes. Para a Geometria Analítica um ponto é uma combinação de números reais e uma curva é uma equação. Capítulo 1 Espaços Dimensionais; Sistemas de Referência; Sistema de Coordenadas Retangulares. 1.1 Espaços Dimensionais. Quando iniciamos um estudo em Geometria Analítica precisamos definir em qual espaço dimensional estão baseadas nossas informações para a correta interpretação e solução dos problemas. Podemos trabalhar em n ReRRR 32 ,, O sistema dimensional R é composto pela reta real (uma dimensão). Uma reta onde representamos infinitos pontos que são associados aos números reais, de modo que cada ponto corresponde a apenas um número real. 1 2 3-1 0-3 -2 π3− 3 2
- 5. GEOMETRIA ANALÍTICA PLANA 5 O Sistema dimensional 2 R é o plano, (duas dimensões) onde os pontos são representados por um par de números reais e as equações das curvas têm duas variáveis. Já 3 R , é o que chamamos de espaço, (três dimensões) onde os pontos são definidos por um terno de números reais e as equações das curvas têm três variáveis. Podemos trabalhar, teoricamente, em uma dimensão qualquer, n R , mas neste texto nos concentraremos principalmente em 2 R . 1.2 Sistemas de Referência para 2 R . Para utilizar o fantástico poder da geometria analítica no estudo de questões geométricas, precisamos, antes de mais nada, saber localizar com precisão, os pontos em um plano. Podemos definir precisamente a posição de um ponto num plano por meio de um par de números reais (coordenadas do ponto). Para isso precisamos de um sistema de referência. Um sistema de referência é composto de um referencial e de uma regra que define como os pontos serão localizados em relação a este referencial. Existem vários sistemas de referência que são regularmente utilizados na Geometria Analítica. Como exemplo, podemos citar o sistema de coordenadas retangulares (chamado também de Plano Cartesiano) e o sistema de coordenadas polares. Estes sistemas são os mais usados, mas existem outros. Na verdade, podemos criar sistemas de referência de acordo com nossa necessidade, bastando para isso, definir um referencial e uma regra para a localização dos pontos no plano. Podemos estudar as curvas planas por meio de equações descritas em relação a um sistema de referência. Uma curva plana é um conjunto de pontos que obedecem a uma determinada regra e sua equação é uma expressão matemática que define tal regra. Por exemplo, para que um conjunto de pontos seja
- 6. GEOMETRIA ANALÍTICA PLANA 6 considerado uma reta, eles precisam estar alinhados e obedecer a uma regra do tipo 0=++ cbyax que é uma equação em relação ao sistema de coordenadas retangulares. Cada curva tem uma equação bem definida em relação a um sistema de referência. Ao mudarmos o sistema de referência mudamos também a equação da curva. Às vezes uma curva possui uma equação mais simples, ou mais apropriada, em relação a um determinado sistema de referência. Por isso existem vários, e são utilizados de maneira conveniente. 1.3 O Sistema de Coordenadas Retangulares. O sistema de coordenadas retangulares tem como referencial um par de retas, chamados de eixos coordenados, infinitos e perpendiculares entre si. Para cada eixo é definida uma escala (normalmente a mesma para os dois) cuja origem é a interseção. Os números reais são representados nestes eixos, sendo que a distância entre dois números inteiros, é uma unidade da escala definida. O número zero está na interseção dos eixos e é chamado de origem do sistema. O eixo horizontal é o eixo das abscissas que são representadas pela letra x. O eixo vertical é o eixo das ordenadas, representadas pela letra y. A figura 1.1 mostra o sistema de coordenadas retangulares como um sistema de referência de um plano. Com isso, qualquer ponto pertencente ao plano pode ser 1 2 3-1 0-3 -2 1 2 3 -1 -3 -2 y x Figura 1.1
- 7. GEOMETRIA ANALÍTICA PLANA 7 perfeitamente localizado. Esta localização será feita medindo-se a distância orientada (considerando o sinal negativo) de um ponto aos eixos coordenados. A distância do ponto ao eixo y será sua abscissa e a distância do ponto ao eixo x será sua ordenada. Isto irá conferir ao ponto um par ordenado de números reais do tipo ),( yxP . Esta é a regra para a localização de pontos em um plano em relação ao sistema de coordenadas retangulares. É importante observar que, a distância do ponto em relação a um eixo coordenado é o valor absoluto de uma de suas coordenadas, ou seja, se o ponto estiver localizado à esquerda do eixo y, sua abscissa terá sinal negativo, bem como sua ordenada terá sinal negativo se ele estiver localizado abaixo do eixo x. Cada ponto do plano será então identificado por um, e apenas um, par ordenado de números reais e, cada par ordenado de números reais representará apenas um ponto do plano. É o que chamamos de característica biunívoca do sistema de coordenadas retangulares. Em homenagem a René Descartes (1596 – 1650), cujo nome em Latim era Renatus Cartesius, filósofo e matemático francês, considerado o pai da Geometria Analítica (vide texto página 85), o sistema de coordenadas retangulares desenvolvido por ele, é também denominado de Sistema Cartesiano ou Plano Cartesiano. Assim o chamaremos daqui em diante. A figura 1.2 acima mostra, representados no Sistema Cartesiano, os pontos ).3,2()2,2();2,1();1,2( −−−− DeCBA )1,2(A )2,1(−B )2,2( −−C )3,2( −D x1 2 3-1 0-3 -2 1 2 3 -1 -3 -2 y Figura 1.2
- 8. GEOMETRIA ANALÍTICA PLANA 8 Capítulo 2 Distância entre dois pontos; Coordenadas do ponto médio. 2.1 Distância Entre Dois Pontos. Como foi dito anteriormente, a Geometria Analítica utiliza a álgebra como ferramenta. Então, se quisermos saber qual é a menor distância entre dois pontos do plano teremos que calcular, e não medir com uma régua. Vamos para tanto, desenvolver uma técnica, ou fórmula, para calcular a distância entre dois pontos quaisquer de um plano. Devemos utilizar, contudo, pontos de coordenadas genéricas, ou seja, pontos que estarão representando qualquer um dos infinitos pontos de um plano. Com isso a técnica, ou fórmula, desenvolvida para calcular a distância entre estes pontos genéricos, servirá para calcular a distância entre dois pontos específicos quaisquer do plano. Obviamente precisaremos também do nosso já conhecido Plano Cartesiano, pois já sabemos que, sem um sistema de referência não é possível localizar pontos num plano por meio de coordenadas e, muito menos, calcular distâncias. Figura 2.1 “A menor distância entre dois pontos é o comprimento do segmento de reta que os une” )x( 2 ' Q )y,xR( 12 )y,x(P 11 0 y x )(y2 " Q )y,(x 22Q )y(P 1 " )x( 1 ' P r
- 9. GEOMETRIA ANALÍTICA PLANA 9 A figura 2.1 mostra dois pontos de coordenadas genéricas ),( 11 yxP e ),( 22 yxQ representados em algum lugar do Plano Cartesiano. Nosso objetivo é definir uma fórmula para calcular a distância entre estes dois pontos. Faremos isso passo a passo. • As projeções dos pontos P e Q nos eixos coordenados nos dão os pontos P’ e Q’ no eixo x, e P’’ e Q’’ no eixo y; • Pelo ponto P passa uma reta paralela ao eixo x, onde marcamos o ponto R; • O triângulo PQR é retângulo; Então, baseado no teorema de Pitágoras, temos: 2 12 2 12 2 12 2 12 2 12 12 222 )()( )()()( , )('''' )('' ,)()()( yyxxd yyxxdPQ então yyQdPdRQ xxQdPdPR masdRQdPRdPQ −+−= −+−= −== −== += Como P e Q são pontos genéricos, podemos utilizar a fórmula acima para calcular a distância entre dois pontos quaisquer do plano, por isso substituímos dpordPQ . Distância entre dois pontos
- 10. GEOMETRIA ANALÍTICA PLANA 10 Exercício resolvido: Prove que o triângulo ABC é isósceles. R: Como dAC = dBC podemos concluir que o triângulo é isósceles. 2.2 Coordenadas do Ponto Médio. Um segmento de reta é definido por dois pontos, que são suas extremidades. O Ponto Médio de um segmento de reta qualquer, é o ponto que o divide em duas partes congruentes (de mesma medida). Podemos determinar as coordenadas de tal ponto. Vamos então deduzir uma fórmula para este fim, utilizando para isso pontos genéricos representados no Plano Cartesiano. Veja a figura 2.2. Figura 2.2 A (-7,2) B (3,-4) C (1,4) 68644)44()31( 68464)24()71( 13636100)24()73( 22 22 22 =+=++−= =+=−++= =+=−−++= BC AC AB d d d )('' 2yQ )(" yM )('' 1yP );( yxM α ),( 2 yxS ),( 22 yxQ s r );( 1yxR x y β ),( 11 yxP )(' 1xP )(' xM )(' 2xQ
- 11. GEOMETRIA ANALÍTICA PLANA 11 • O ponto ),( yxM é o ponto médio do segmento definido pelos pontos ),( 11 yxP e ),( 22 yxQ ; • As projeções dos pontos P, M e Q nos eixos coordenados nos dão os pontos P’, M’ e Q’ no eixo x, e P’’, M’’ e Q’’ no eixo y; • Pelo ponto P, traçamos uma reta r, paralela ao eixo x, e obtemos o ponto ),( 1yxR ; • Pelo ponto M, traçamos uma reta s, também paralela ao eixo x, e obtemos o ponto ),( 2 yxS ; • Podemos identificar então, dois triângulos retângulos PRM e MSQ, que são congruentes, pois: ≅ ≅ ≅ ∆≅∆ )(ˆˆ )( )( retosSR médiopontoéMMQPM entescorrespond SQMMRP βα • Sendo congruentes os triângulos, podemos concluir que seus respectivos catetos PR e MS têm a mesma medida; • O cateto PR, tem a mesma medida do segmento P’M’ que por sua vez mede ).( 1xx − O cateto MS, tem a mesma medida do segmento M’Q’ que por sua vez mede )( 2 xx − , então: 2 2 21 21 21 21 xx x xxx xxxx xxxx + = += +=+ −=− 2 21 yy y + =analogamente:
- 12. GEOMETRIA ANALÍTICA PLANA 12 Concluindo: A abscissa do ponto médio de um segmento de reta será a metade da soma das abscissas das extremidades do segmento, e, a ordenada do ponto médio será a metade da soma das ordenadas das extremidades. ++ 2 , 2 2121 yyxx M Exercícios resolvidos: 1) A mediana de um triângulo é um segmento de reta que une um vértice ao ponto médio do lado oposto. Ache o comprimento das medianas do triângulo cujos vértices são: A(2,3) ; B(3,-3) e C(-1,-1) Cálculo dos pontos A’, B’, C’ Ponto médio C (-1, -1) )2,1(' −A 0, 2 5 'C 1, 2 1 'B A (2, 3) B (3, -3) AA’, BB’ e CC’ são as medianas do ∆ ABC. Cálculo do comprimento das medianas 1, 2 1` B )2,1(` −A = − = = + = = − = = − = −= −− = = − = 0 2 33 2 5 2 32 1 2 13 2 1 2 12 2 2 13 1 2 13 ` ` ` ` ` ` yC xC yB xB yA xA 53 2 1 4 53 1 4 49 1 2 7 )10(1 2 5 89 2 1 4 89 16 4 25 4 2 5 )31(3 2 1 26251)32()21( 2 2 2 ` 2 2 2 2 ` 22` ==+= + =++ += ==+= + − =++ −= =+=−−+−= mCC mBB mAA 0, 2 5 'C
- 13. GEOMETRIA ANALÍTICA PLANA 13 2) Determinar B, sabendo que M(7,-3) é o ponto médio de AB, dado A(1,2). 2.3 Exercícios propostos: 1) Calcular a distância entre os pontos ( )4,3 +− baA e ( )1,1 ++ baB . 2) Se M(4,2), N(2,8) e P(-2,6) são os pontos médios dos lados AB, BC e CA respectivamente de um triângulo ABC, determinar A, B e C. 3) Determinar os pontos que dividem o segmento −− AB em quatro partes congruentes, sendo dados: A(-3,11) e B(5,-21). 4) Num triângulo ABC são dados: A(2,0) e M(-1,4) ponto médio de −− AB . obter o vértice C do triângulo, sabendo que os lados AC e BC medem 10 e 10 2 respectivamente. 5) Ache as abscissas dos pontos tendo ordenada 4 e que estão a uma distância de 117 do ponto P(5,-2). 6) Prove que o quadrilátero com vértices consecutivos em (1,2), (5,-1), (11,7) e (7,10) é um retângulo. 7) Prove que os pontos (2,4), (1,-4) e (5,-2) são vértices de um triângulo retângulo e ache sua área. 8) Prove que os pontos (1,-1), (3,2), (7,8) são colineares, usando a fórmula da distância entre dois pontos. 9) Os vértices opostos de um quadrado estão em (3,-4) e (9,-4). Ache os outros dois vértices. )8,13( 813 62141 2 2 3 2 1 7 − −== −=+=+ + =− + = B yx yx yx A (1, 2) B (x, y) M (7,-3)
- 14. GEOMETRIA ANALÍTICA PLANA 14 10) Um triângulo ABC é retângulo em A, que pertence ao eixo das ordenadas. Tendo os pontos B(2,3) e C(-4,1) determinar A. 11) Dados A(-3,1) e B(3,5) obter o ponto em que a reta AB corta a bissetriz dos quadrantes ímpares. 12) Dados A(5,7) e B(-6,5) obter o ponto em que a reta AB corta a bissetriz dos quadrantes pares. Respostas: 1) 5 2) A(0,0), B(8,4) e C(-4,12) 3) (-1,3), (1,-5) e (3,-13) 4) C1(-6,-6) e C2(10,6) 5) 144 =−= xoux 9) (6,-7) e (6,-1) 10)A1(0,-1) e A2(0,5) 11) (9,9) 12) − 13 67 , 13 67
- 15. GEOMETRIA ANALÍTICA PLANA 15 Capítulo 3 Retas em R²; Coeficiente angular; Equações da reta; Interseção de retas; Paralelismo; Perpendicularismo; Ângulo entre duas retas; Distância entre ponto e reta. 3.1 Retas em R². Começaremos agora o estudo das equações de algumas curvas planas. Neste capítulo vamos discutir as particularidades e estudar a equação de uma curva simples, porém de extrema importância. A reta. Sim, a reta também é chamada de curva, numa generalização deste termo. Uma curva plana é formada por um conjunto de pontos num plano que obedecem a uma determinada regra, que é sua equação. A reta, como sugere o próprio nome, é um conjunto de pontos alinhados. Para que tenhamos uma reta bem definida num plano, basta conhecer dois de seus infinitos pontos, ou seja, conhecendo apenas dois pontos de uma reta podemos determinar sua equação. Mas também podemos determinar a equação de uma reta conhecendo um de seus pontos e seu coeficiente angular. Então, o que é o coeficiente angular de uma reta? 3.2 Coeficiente Angular. α y r x αP Q y∆ x∆ “O coeficiente angular também é chamado de inclinação ou declividade” Figura 3.1
- 16. GEOMETRIA ANALÍTICA PLANA 16 Imagine uma partícula se movendo do ponto P ao ponto Q ao longo da reta r. Ao fazer este movimento a partícula se deslocou horizontalmente x∆ e verticalmente y∆ . O coeficiente angular da reta r, denotado pela letra m, por definição é a razão entre o deslocamento vertical e o deslocamento horizontal. x y horizontaliação verticaliação m ∆ ∆ == var var Observando a figura 3.1 podemos identificar um triângulo retângulo cuja hipotenusa é o segmento PQ e os catetos são y∆ e x∆ . O ângulo α é o ângulo entre a reta e o sentido positivo do eixo x, que é correspondente ao ângulo agudo adjacente ao cateto x∆ do triângulo retângulo. A tangente do ângulo α é calculada por: x y tg ∆ ∆ =α . Então o coeficiente angular de uma reta pode ser calculado através da expressão: αtgm = Através do coeficiente angular de uma reta podemos saber se ela é crescente, decrescente, constante ou vertical. Ora, se retas são crescentes, o ângulo entre elas e o sentido positivo do eixo x pode variar no intervalo 2 0 π α << . Os ângulos neste intervalo possuem tangentes positivas e consequentemente as retas terão coeficientes angulares positivos )0( >m . Lembre-se: αtgm = . “ O coeficiente angular de uma reta é a tangente do ângulo entre a reta e o sentido positivo do eixo x.”
- 17. GEOMETRIA ANALÍTICA PLANA 17 Se retas são decrescentes, o ângulo α estará no intervalo πα π << 2 . Os ângulos neste intervalo possuem tangentes negativas, logo, essas retas terão coeficientes angulares negativos )0( <m . As retas constantes são aquelas paralelas ao eixo x, cujo ângulo α é igual a zero. Estas retas têm coeficiente angular igual a zero )0( =m , pois 00 =tg . As retas verticais, por sua vez, são perpendiculares ao eixo x. Então 2 π α = . Essas retas não possuem coeficiente angular, pois não existe 2 π tg . Figura 3.2 A figura 3.2 mostra um exemplo de cada tipo de reta, em relação à inclinação. α y r x 0=α y t x 0=m 0>m 2 π α = y u x m não é definido α y s x 0<m
- 18. GEOMETRIA ANALÍTICA PLANA 18 3.2.1 Coeficiente Angular através de dois pontos. Podemos também, determinar o coeficiente angular de uma reta, através das coordenadas de dois pontos pertencentes à reta. Observe a figura 3.3 onde estão representados, uma reta e dois de seus pontos com coordenadas genéricas. Figura 3.3 • As projeções dos pontos A e B nos eixos coordenados nos dão os pontos A’ e B’ no eixo x, e A’’ e B’’ no eixo y; • Pelo ponto A, traçamos uma reta s, paralela ao eixo x, e obtemos o ponto R; • O triângulo ARB é retângulo, então: AR RB tg =α ou 12 12 xx yy tg − − =α )('' 1yA )('' 2yB α y s ),( 22 yxB )(' 2xB)(' 1xA ),( 11 yxA R x r
- 19. GEOMETRIA ANALÍTICA PLANA 19 Portanto, o coeficiente angular de uma reta pode ser calculado usando a fórmula: 12 12 xx yy m − − = Exercício resolvido: 1) Determinar o coeficiente angular das retas e esboçar os gráficos: 3 2 3 2 25 13 ) 12 12 1 = = − − = − − = m m xx yy m r 1 02 02 ) 12 12 2 = − − = − − = m xx yy m r )4;2( )3;2( )4;2( )4;3( )2;2( )1;1( )2;2( )0;0( )3;5( )1;2( 5 5 5 4 4 4 3 3 3 2 2 2 1 1 1 B A r B A r B A r B A r B A r −− − − α B1 A1 x y B2 A2 α y x
- 20. GEOMETRIA ANALÍTICA PLANA 20 1 3 3 12 12 ) 12 12 3 −= − = −− + = − − = m xx yy m r 0 32 44 ) 12 12 4 = + − = − − = m xx yy m r ∃/= + = − − = 0 7 0 34 ) 12 12 5 m xx yy m r Obs: Logicamente o coeficiente angular de uma reta pode ser obtido tomando- se quaisquer pares de pontos pertencentes à mesma. y x α B3 A3 x B4A4 y A5 x B5 y 0=m , para todas as retas paralelas ao eixo x. Retas constantes. m , não é definido para todas as retas perpendiculares ao eixo x. Retas verticais.
- 21. GEOMETRIA ANALÍTICA PLANA 21 3.3 Equações da Reta. Como vimos uma reta fica bem determinada num plano, se conhecemos dois de seus pontos ou se conhecemos um de seus pontos e seu coeficiente angular. A partir desses elementos podemos definir uma equação matemática, ou seja, uma regra que nos fornece ou representa todo o infinito conjunto de pontos que pertencem a uma reta. Para isso precisamos, como já sabemos, de um sistema de referência que irá nos possibilitar identificar os pontos por meio de coordenadas. Se utilizarmos o plano cartesiano, teremos para as retas, equações do 1º grau com duas variáveis. 3.3.1 Equação da reta em função de dois pontos. Figura 3.4 Os pontos A e B são pontos conhecidos da reta e estão representados no plano cartesiano, com coordenadas genéricas, pois a equação obtida servirá como um modelo para se obter a equação de uma reta específica qualquer. O ponto M é um ponto qualquer da reta, ou um ponto genérico, e suas coordenadas serão as variáveis da equação. y ),( yxM ),( 22 yxB ),( 11 yxA r x
- 22. GEOMETRIA ANALÍTICA PLANA 22 Podemos calcular o coeficiente angular da reta acima utilizando ou os pontos A e M ou os pontos A e B. Então: 12 12 1 1 xx yy xx yy mm ABAM − − = − − = 3.3.2 Equação da reta em função do coeficiente angular. Uma simples alteração na fórmula nos possibilita determinar facilmente a equação de uma reta no plano quando conhecemos apenas um de seus pontos e seu coeficiente angular. )( 1 12 12 1 xx xx yy yy − − − =− A equação de qualquer reta no plano, pode ser obtida substituindo as coordenadas de dois de seus pontos na fórmula, ou modelo, acima. )( : : )( : 11 12 12 1 12 12 1 xxmyy então m xx yy mas xx xx yy yy temos −=− = − − − − − =−
- 23. GEOMETRIA ANALÍTICA PLANA 23 3.3.3 Equação Reduzida. É interessante trabalhar com a equação reduzida de uma reta, pois deste modo podemos visualizar facilmente seu coeficiente angular e seu coeficiente linear (intercepto do eixo y). A equação reduzida tem um formato característico como veremos a seguir: )( : 11 xxmyy temos −=− Se o ponto conhecido for ),,0( bB então: )0( −=− xmby 3.3.4 Equação Segmentária. A equação de uma reta na forma segmentária é muito interessante, pois temos a informação imediata dos interceptos da reta nos eixos coordenados. Figura 3.6 Coeficiente linear (onde corta o eixo-y) Coeficiente angular bmxy += A (a,0) B (0,b) y x ),0( bB y x Figura 3.5
- 24. GEOMETRIA ANALÍTICA PLANA 24 Substituindo os pontos A e B na fórmula da equação da reta, temos: ⇒=+ =+ →=+ +−= −−= − − − =− − − − =− 1 )( )( 0 0 0 )( 1 12 12 1 a x b y b b ab bx b y bportudoividindobx a b y bx a b y ax a b y ax a b y xx xx yy yy d onde 3.3.5 Equação Geral. É a equação da reta na forma: onde a e b não são nulos simultaneamente. a é o intercepto eixo-x b é o intercepto eixo-y 1=+ b y a x 0=++ cbyax 0≠bea
- 25. GEOMETRIA ANALÍTICA PLANA 25 Para relembrar: verticalretam teconsretam edecrescentretam crescenteretam bmxySeja ⇒∃ ⇒= ⇒< ⇒> += tan0 0 0 Exercício resolvido: 1) Ache a equação da reta que passa pelos pontos A(8,-8) e B(12,-16) nas formas reduzida, geral e segmentária: Sol: Cálculo de m ⇒= − +− = − − = 4 8 812 816 2 12 m xx yy m 82 1628 )8(28 )( 11 +−= +−=+ −−=+ −=− xy xy xy xxmyy 082 =−+ yx 2−=m Eq. reduzida Eq. geral Eq. segmentária 8 8 88 2 82 =+ =+ yx yx 1 84 =+ yx
- 26. GEOMETRIA ANALÍTICA PLANA 26 3.4 Interseção de retas. Figura 3.7 O ponto de interseção de duas retas deve satisfazer à equação de ambas, portanto, para determiná-lo, basta resolver um sistema formado por tais equações. Em geral a solução de um sistema de equações, é, ou são, os pontos de interseção de seus gráficos. Ex: Obter o ponto I de interseção das retas 3x + 4y - 12 = 0 e 2x – 4y + 7 = 0 sol: ⇒= −= =−+× = =− =+− =−+ 4 9 ,1 4 9 3124 012413 :, 1 055 : 0742 01243 Iy y y temosequaçãoprimeiranaxdevalorolevando x x temosequaçõesassomando yx yx y x I
- 27. GEOMETRIA ANALÍTICA PLANA 27 3.5 Condição de Paralelismo. Duas retas são consideradas paralelas se possuem o mesmo coeficiente angular e coeficientes lineares distintos. Figura 3.8 3.6 Condição de Perpendicularismo. Os coeficientes angulares de duas retas distintas também podem nos dizer se elas são perpendiculares. Vejamos a figura 3.9 abaixo. Figura 3.9 y x rα sα s r ( ) msmr stgrtg correspsr = ⇓ = = αα αα . rα sα sα rα y x sr t
- 28. GEOMETRIA ANALÍTICA PLANA 28 Pelo ponto de interseção das retas, traçamos uma reta t, paralela ao eixo-x. Com isso podemos identificar os ângulos correspondentes de res αα entre as retas r e s e a reta t. Podemos relacionar os ângulos res αα da seguinte maneira: 0.1: 2 : 2.1 : 2 )( , 2 , 2 =+∃ = + − =− =− += stgrtgentãotg mastg stgrtg stgrtg identidadeausandotgsrgt seguesr ousr αα π π αα αα π αα π αα π αα ms mrmsmr msmr stgrtg 1 1. 0.1 0.1 −=⇒−= =+ =+ αα Concluindo: Duas retas r e s distintas são perpendiculares, se e somente se, ms mr 1 −= , o que equivale a dizer que, se duas retas são perpendiculares, o coeficiente angular de uma é igual ao da outra invertido e com o sinal oposto. Por exemplo, se o coeficiente angular de uma reta é igual a 3, então o coeficiente angular de qualquer reta perpendicular a ela é 3 1 − . tgbtga tgbtga batg ⋅+ − =− 1 )(
- 29. GEOMETRIA ANALÍTICA PLANA 29 3.7 Ângulo entre Duas Retas. Com a ajuda da figura 3.10, podemos deduzir uma fórmula para o cálculo do ângulo entre duas retas quaisquer, também utilizando seus coeficientes angulares. Figura 3.10 ⇒ ×+ − = −= −= stgrtg stgrtg tg srtgtg sr αα αα θ ααθ ααθ 1 )( Exercício resolvido: 1) Obter o ponto P, simétrico de Q(-1,8) em relação à reta r de equação 03 =−− yx msmr msmr tg ⋅+ − = 1 θ M é o ponto médio de PQ. M r: x – y – 3 = 0 Q(-1, 8) P(x, y) rα y x rα sα r s sα θ
- 30. GEOMETRIA ANALÍTICA PLANA 30 Cálculo da inclinação da reta r 13 03 =⇒−= =−− rmxy yx então : 1−=PQm Equação da reta PQ 07 18 )1(18 )( 11 =−+ −−=− +−=− −=− yx xy xy xxmyy Determinação do ponto M ⇒ PQr ∩ 5 102 0102 07 03 = = =− =−+ =−− x x x yx yx )2,5(2 35 035 My y y ⇒= −= =−− 3.8 Distância Entre Ponto e Reta. A menor distância de um ponto ),( 00 yxP a uma reta 0: =++ cbyaxr é o comprimento do segmento que vai do ponto à reta e é perpendicular à mesma, como vemos na figura 3.11. Concluindo: 11 101 2 1 5 2 21 = =+− +− = + = x x x xx x 4 48 2 8 2 2 21 −= =+ + = + = y y y yy y )4,11( − ⇓ P
- 31. GEOMETRIA ANALÍTICA PLANA 31 Figura: 3.11 Podemos calcular a menor distância do ponto P à reta r utilizando a fórmula: 22 00 Pr ba cbyax d + ++ = Exercício resolvido: 1) Calcular a medida da altura AH do triângulo cujos vértices são: A(1,1), B(-1,-3) e C(2,-7). utilizando a fórmula da distância entre ponto e reta, temos: 4 5 20 25 20 916 131.31.4 01334: )1,1( === + ++ = =++ dpr dpr yxBCreta A Então a altura AH mede 4 unidades. HB(-1,-3) A(1, 1) C(2,-7) 0: =++ cbyaxr ),( 00 yxP
- 32. GEOMETRIA ANALÍTICA PLANA 32 2) Calcular a distância entre as retas paralelas r: 7x + 24y – 1 = 0 e s: 7x + 24y + 49 = 0 3.9 Exercícios propostos: 1) Em cada caso determine a equação geral da reta: a) que passa pelo ponto A(-1,6) e tem inclinação 3; b) que passa pelos pontos P(2,-1) e Q(0,5); c) bissetriz do 1º e 3º quadrantes; d) que passa pela origem e tem coeficiente angular 3 2 −=m . 2) Verifique se a afirmação está correta: a) a reta 01042: =+− yxr é perpendicular à reta 062: =++ yxs ; b) a reta 023: =+− yxt é paralela à reta 0526: =−− yxu . 3) Determinar a equação da reta que passa pelo ponto P(-1,2) e é paralela à reta 0132: =+− yxr . 4) Determinar a equação da reta que passa por Q(2,-3) e é perpendicular à reta 072: =+− yxs . 5) Determinar os vértices A, B e C do triângulo cujos lados têm as equações 01: =+− yxAB , 0177: =++ yxBC e 01135: =−+ yxCA . 6) Achar o ponto B simétrico de A(3,-1) em relação à reta 01032: =−+ yxr . Tomamos um ponto P de r, atribuindo um valor qualquer a x e calculando y rPentão yy y yx ∈− −=⇒−= −= =−+⇒= )2,7(, 2 24 48 49124 01247.77 logo: 2 25 50 57649 49)2.(247.7 == + +−+ == dPsdrs , ou seja: a distância entre r e s é de 2 unidades s r P(7,-2)
- 33. GEOMETRIA ANALÍTICA PLANA 33 7) Provar que são perpendiculares as diagonais do quadrilátero de vértices consecutivos A(2,-1), B(6,-1), C(4,5) e D(0,1). 8) Determinar o valor de k de modo que a reta 073: =++ kyxr passe pelo ponto A(3,-2). 9) Calcular a distância do ponto A(3,4) à reta 01043: =−+ yxs . 10) Determinar a distância do ponto P à origem do sistema cartesiano onde P é a interseção das retas 02: =−xr e 03: =−ys . 11) Encontre a equação da reta que passa pelo ponto A(3,2) e que forma com os eixos coordenados, no 1º quadrante, um triângulo de área igual a 12. 12) Calcular a interseção da reta 012: =+− yxr com a reta que passa pelos pontos A(0,3) e B(1,1). 13) Determinar o ponto da reta 043: =++ yxr que é eqüidistante dos pontos P(-5,6) e Q(3,2). 14) Ache a equação da reta suporte da altura relativa ao vértice A do triângulo de vértices A(2/3,1), B(-3,0) e C(6,1). 15) Obter o ponto de interseção das diagonais AC e BD do quadrilátero ABCD, sendo dados A(0,0), B(4,1), C(7,7) e D(-1,6). 16) Obter a equação da mediatriz do segmento AB, dados A(1,-7) e B(6,-12). 17) Dadas as retas 0343: =+− yxr e 22: += xys , determine o ponto P da reta s, que dista 6 unidades da reta r. 18) O baricentro de um triângulo ABC é G(4,-2). Obter C, sabendo que A(5,-7) e B(8,-3). Obs.: baricentro: ++++ 3 , 3 yCyByAxCxBxA G 19) Obter os vértices B e C do triângulo ABC sendo dados o vértice A(0,0), o ponto M(1,2) médio do lado AB e o baricentro G(0,5). 20) Verificar se os pontos )2,1()3,2(),1,(` ++++− bCebaBbaA são colineares. 21) Existe alguma reta passando por )4,3()2,1(),1,(` +++++ aaCeaaBaaA ? 22) Determinar x de modo que )12,1()3,2(),2,(` −−− CeBxA sejam colineares. 23) Obter o baricentro do triângulo MNP, dados ),(),,(` fecbNedbaM −−−− e ),( dfacP −− .
- 34. GEOMETRIA ANALÍTICA PLANA 34 24) Calcular a altura relativa ao vértice A do triângulo de vértices ).2,5()1,2(),3,0( −− CeBA Respostas: 1) a) 093 =+− yx b) 053 =−+ yx c) 0=− yx d) 032 =+ yx 2) a) sim b) sim 3) 0832 =+− yx 4) 012 =−+ yx 5) A(1,2), B(-3,-2) e C(4,-3) 6) 13 29 , 13 67 B 8) k=8 9) 3 10) 13 11) 01232 =−+ yx 12) 2, 2 1 13) (-2,2) 14) 079 =−+ yx 15) 2 5 , 2 5 16) 013 =−− yx 17) )12,5()12,7( 21 PeP −− 18) C(-1,4) 19) B(2,4) e C(-2,11) 20) sim 21) sim 22) 1=x 23) G(0,0) 24) 23
- 35. GEOMETRIA ANALÍTICA PLANA 35 Capítulo 4 Circunferência. 4.1 Definição. A circunferência é uma curva plana que, como a reta, também é formada por um conjunto de infinitos pontos de 2 R . Sua definição matemática, ou seja, a regra que define como esses pontos devem estar posicionados no plano para que descrevam uma circunferência é a seguinte: Circunferência é o conjunto de pontos em um plano, que são eqüidistantes de um ponto fixo deste plano. Este ponto fixo é chamado de centro da circunferência, e a distância constante é seu raio. O centro e o raio são os principais elementos de uma circunferência. Figura 4.1 Na figura 4.1, temos uma circunferência de centro c e raio r, representada em um plano π . Os pontos nMMMM ,,, 321 pertencem à circunferência, se e somente se, a distância de cada um deles ao centro da circunferência for igual ao raio. rdcMndcMdcMdcM ==== 321 r P Q c M1 M2 M3 π Mn
- 36. GEOMETRIA ANALÍTICA PLANA 36 A distância do ponto Q ao centro é maior que o raio e portanto ele não pertence à circunferência, (Q é um ponto exterior), assim como o ponto P também não pertence à circunferência pois sua distância ao centro é menor que o raio, (P é um ponto interior). rdcPerdcQ <> 4.2 Equação da Circunferência. Para determinar a equação de uma circunferência, é necessário conhecer seu centro e seu raio. Na figura 4.2 abaixo, está representada no plano cartesiano uma circunferência de centro ),( khc e raio r. Sabemos pela definição de circunferência que a distância de um ponto qualquer ),( yxM ao centro ),( khc é igual ao raio r. Figura 4.2 M(x,y) c(h,k) r y x ( ) 222 2 2 22 22 )()( )()( )()( : : rkyhx rkyhx rkyhx então rdcMmatemáticaDefinição =−+− =−+− =−+− = Eq. da circunferência na forma centro-raio
- 37. GEOMETRIA ANALÍTICA PLANA 37 Quando a equação de uma circunferência se apresenta na forma centro-raio é relativamente fácil identificar seus principais elementos, ou seja, centro e raio. Por exemplo, a equação 17 5 2 )3( 2 2 = ++− yx representa uma circunferência de centro − 5 2 ,3 e raio 17 . Exercício resolvido: Determinar a equação da circunferência cujo centro é o ponto C(-3,4) e o raio r=6. sol: 222 )()( rkyhx raiocentroequação =−+− − 36)4()3( 22 =−++ yx 4.3 Equação Geral da Circunferência. A equação de uma circunferência também pode ser representada de forma geral, como o desenvolvimento da equação centro-raio. Vejamos: ( ) 022 : 22 :sen )()( , 22222 22222 222 =−++−−+ =+−++− =−+− rkhkyhxyx ordememcolocando rkkyyhhxx temosvolvendode rkyhx rraioekhCcentrodeequaçãoaSeja É a equação pedida, através da qual podemos identificar facilmente o centro e o raio.
- 38. GEOMETRIA ANALÍTICA PLANA 38 0 :, 2 2 : 22 222 =++++ =−+ =− =− FEyDxyx temosFrkh Ek Dh fazendo É importante observar que toda equação geral de circunferência possui os dois termos do 2º grau e seus coeficientes devem ser obrigatoriamente iguais. Vamos desenvolver a equação do exercício anterior 01186 03616896 36)4()3(: 22 22 22 =−−++ =−+−+++ =−++ yxyx yyxx yxtemos 4.4 Identificando o Centro e o Raio na Equação Geral da Circunferência. Se não podemos identificar facilmente o centro e o raio, então teremos de calcular, pois são os principais elementos da circunferência. Faremos o seguinte: Seja a equação geral: 022 =++++ FEyDxyx Para identificar o centro e o raio na equação acima utilizaremos os coeficientes D, E e F. −−∴−=⇒−= −=⇒−= 2 , 22 2 2 2 ),(: ED C E kkE D hhD khccentro Esta equação está na forma Geral. Não podemos identificar facilmente o centro e o raio ao olhar. Esta é a Equação Geral da circunferência
- 39. GEOMETRIA ANALÍTICA PLANA 39 2 4 4 4 44 22 : 2222 2 22 2 22 2 222 FED r FED r F ED r F ED r rkhF rraio −+ =∴ −+ = −+= − −+ −= −+= realénciacircunferêaFEDse pontoumapenasénciacircunferêaFEDse vazioconjuntonciacircunferêFEDse Obs ⇒>−+ ⇒=−+ ∃⇒<−+ 0)4( 0)4( )(0)4( : 22 22 22 Exercício resolvido: 1) Dada a equação da circunferência, 076322 =−+−+ yxyx , identificar o centro e o raio. − − − − −− 3, 2 3 2 6 , 2 3 2 , 2 C C ED C 2 73 2 28369 2 )7(4369 2 422 = ++ = −×−+ = −+ = r r r FED r
- 40. GEOMETRIA ANALÍTICA PLANA 40 4.5 Exercícios propostos: 1) Determine o centro e o raio, caso a circunferência exista: a) 014222 =+−−+ yxyx b) 0918333 22 =+−−+ yxyx c) 03110722 =+−++ yxyx d) 03222 =−−+ yyx e) 034223 22 =+−+− yxyx f) 0922 =+−− yx g) 0422 =++ yx h) 08222 =+−++ yxyx 2) Determine a equação geral da circunferência cujo centro é o ponto C(3,-5) e é tangente à reta 0143: =+− yxr . 3) Determinar a equação da reta tangente à circunf. 0392222 =−−++ yxyx no ponto A(4,5). 4) Determinar a equação da circunferência que passa pelo ponto A(0,1) e tangencia a reta 034 =+− yx no ponto B(0,3). 5) Achar a equação cartesiana da circunferência que passa pelo ponto A(4;8) e tangencia as retas .010 == yey 6) Determinar os pontos de interseção da reta 05 =−+ yx com a circunferência 014222 =+−−+ yxyx e fazer um esboço do gráfico das duas curvas. 7) Determinar as equações das circunferências de raio r = 2 e tangentes à reta 01 =−+ yx e centro sobre o eixo x. 8) A reta 01 =+y é tangente à circunferência de centro (-1,m) e raio 2. Ache uma equação de cada circunferência que tem essa propriedade. 9) Dada a circunferência 03222 =−−+ yyx e os pontos ( )31,1 −−M e ( )1,2N que pertencem a mesma. Calcular o comprimento da corda MP, sabendo que N e P são os extremos de um diâmetro.
- 41. GEOMETRIA ANALÍTICA PLANA 41 10) Obter as equações das circunferências de raio 3, tangentes à reta 07 =−y e tangentes exteriormente à circunferência .422 =+ yx 11) Determinar a equação da circunferência que passa pelos pontos ).4,1()0,5(),3,2( −−− PeNM Respostas: 1) a) r=2, c(1,2) b) r= 2 5 , c 3, 2 1 c) r= 2 5 , c − 5, 2 7 d) r=2 , c( )1,0 e) não é circunferência f) r=3, c( )0,0 g) conjunto vazio h) conjunto vazio 2) 0210622 =−+−+ yxyx 3) 04045 =−+ yx 4) ( ) ( ) 1724 22 =−+− yx 5) ( ) 255 22 =−+ yx e ( ) ( ) 2558 22 =−+− yx 6) )4,1()2,3( e 7) ( ) 21 22 =++ yx e ( ) 23 22 =+− yx 8) ( ) ( ) 411 22 =−++ yx e ( ) ( ) 431 22 =+++ yx 9) 2=MPd 10) ( ) ( ) 943 22 =−++ yx e ( ) ( ) 943 22 =−+− yx 11) 0458422 =−−++ yxyx
- 42. GEOMETRIA ANALÍTICA PLANA 42 Capítulo 5 O Estudo das Cônicas. Seções Cônicas. Circunferências, elipses, hipérboles e parábolas: todas essas curvas são encontradas a partir de seções de um plano em uma superfície cônica. (ver apêndice IV). Muitas descobertas importantes em matemática pura e na ciência em geral estão relacionadas às seções cônicas. Os gregos clássicos - Arquimedes, Apolônio e outros - estudavam essas belas curvas por puro prazer, como forma de desafio, sem qualquer pensamento em possíveis aplicações. As primeiras aplicações apareceram quase 2.000 anos depois, no início do século XVII. Em 1604, Galileu descobriu que, lançando-se um projétil horizontalmente do topo de uma torre, supondo que a única força atuante fosse a gravidade - isto é, a resistência do ar e outros fatores complicadores são desconsiderados -, sua trajetória será uma parábola. Um dos grandes eventos da história da Astronomia ocorreu alguns anos mais tarde, apenas em 1609, quando Kepler publicou sua descoberta de que a órbita de Marte era uma elipse, lançando a hipótese de que todos os planetas se moveriam em órbitas elípticas. Cerca de 60 anos depois disso, Newton provou matematicamente que a órbita planetária elíptica é causa e conseqüência de uma lei de atração gravitacional, baseada no inverso do quadrado da distância. Isso levou Newton a formular e publicar (em 1687) sua famosa Teoria de Gravitação Universal, para explicar o mecanismo do sistema solar, teoria esta considerada como sendo a maior contribuição feita a ciência por um só homem. Esses desenvolvimentos ocorreram centenas de anos atrás, mas o estudo das seções cônicas não é, ainda hoje, nem um pouco anacrônico. De fato, essas curvas são instrumentos importantes nas explorações espaciais dos dias de hoje, e também nas pesquisas do comportamento de partículas atômicas: os satélites artificiais movem-se em torno da terra em órbitas elípticas e a trajetória de uma partícula alfa movendo-se no campo elétrico de um núcleo atômico é uma hipérbole. Esses exemplos e muitos outros mostram que a importância das seções cônicas, tanto antigamente como atualmente, não pode ser desprezada.
- 43. GEOMETRIA ANALÍTICA PLANA 43 5.1 A Elipse. A Elipse é uma curva plana, formada por um conjunto de infinitos pontos de 2 R . Sua definição matemática, ou seja, a regra que define como esses pontos devem estar posicionados no plano para que descrevam uma elipse é a seguinte: Elipse é o conjunto de infinitos pontos de um plano cuja soma das distâncias a dois pontos fixos deste plano (focos) é constante (k). Cada elipse tem a sua constante k. Figura 5.1 kFdMFdMelipseMn nn =+⇒∈ ' 5.1.1 Elementos da Elipse. A figura 5.2 mostra uma elipse com centro na origem do sistema cartesiano. F’ M1 π M2 Mn F y x 2a B ’ (0,-b) A ’ (-a,0) A(a,0) B(0; b)2c F ’ (-c,0) F(c,0) B(0,b) Figura 5.2
- 44. GEOMETRIA ANALÍTICA PLANA 44 Seus principais elementos são: • Eixo maior: é o segmento A’A, cuja medida vale 2a; • Eixo menor: é o segmento B’B, cuja medida vale 2b; • Vértices: são os pontos )0,()0,(' aAeaA − ; • Focos: são os pontos fixos )0,()0,(' cFecF − , a distância focal (entre focos) mede 2c; • Os pontos ),0(),0(' bBebB − são as extremidades do eixo menor. Importante: 1. A constante k, característica de cada elipse, é igual ao comprimento de seu eixo maior 2a. Então: ak 2= Podemos provar esta afirmação utilizando o ponto )0,(' aA − que pertence à elipse e por isso deve satisfazer à condição: kFdAFdA =+ ''' de fato: aK kcaca então caFdA caFdA 2 , ' '' = =++− += −= 2. Relação entre a, b e c. 222 cba += Definição matemática y B ’ (0,-b) M(x,y) x A ’ (-a,0) A(a,0) B(0,b) F ’ (-c,0) F(c,0) a b c a y
- 45. GEOMETRIA ANALÍTICA PLANA 45 5.1.2 Equação Reduzida da Elipse. Primeiramente estudaremos as cônicas tomando como referência um sistema de eixos coordenados, as elipses e hipérboles estarão posicionadas tal que seus vértices e focos fiquem sobre um dos eixos e simétricos em relação à origem como na figura 5.2. No caso das parábolas, seu foco deverá estar sobre um dos eixos e seu vértice posicionado na origem. Com isso vamos obter as equações reduzidas destas curvas. Vamos agora determinar a equação de uma elipse específica, cujos focos são )0,3()0,3(' FeF − e cujo eixo maior 2a mede 10 unidades. Lembrando que ka =2 . Esta elipse está representada na figura 5.3 Figura 5.3 Seja o ponto genérico elipseyxM ∈),( adMFdMFmatemáticaDefinição 2: ' =+ então: M(x, y) x 2a = 10 A ’ (-5,0) A(5,0) F ’ (-3,0) F(3,0) y
- 46. GEOMETRIA ANALÍTICA PLANA 46 10)3()3( 2222 =+−+++ yxyx 5.1.3 Equações Reduzidas Genéricas da Elipse. Podemos determinar uma equação genérica reduzida para todas as elipses com focos e vértices sobre um dos eixos coordenados e simétricos em relação à origem. A figura 5.4 mostra uma elipse cujos elementos estão com coordenadas genéricas em relação ao sistema cartesiano. Determinaremos sua equação aplicando a definição matemática. Figura 5.4 ( ) ( ) ( ) 1 16251625 1 400 25 400 16 400 400 )400(2516400 2516225625 25225150256251509 96(256251509 )3(5)253( )4()3(2010012 6)3(201006 96)3(2010096 )3(10)3( 2222 22 22 22 222 222 2 222 22 22 222222 2 22 2 22 =++= += ÷+= +=− ++−=+− ++−=+− +−−=− ÷+−−=− −+−−= ++−++−−=+++ +−−=++ yxyx yx yx yx yxxxx yxxxx yxx yxx xyxx yxxyxyxx yxyx ou Equação reduzida da elipse na sua forma característica após simplificação. Para lembrar: 222 cba += y M(x,y) x A ’ (-a,0) A(a,0) F ’ (-c,0) F(c,0) y
- 47. GEOMETRIA ANALÍTICA PLANA 47 ( ) ( ) ( ) 22 22 22 22 22 22 22222222 222 22222222 222222224 22222224222 22224222 2 2222 222 222 222222222 2 22 2 22 2222 ' )( )()( 22 )2(2 )()( )4()(444 2)(442 2)(442 )(2)( 2)()( 2 ba ya ba xb ba ba bayaxbba bcaazendo yacaxcaa yaxcxacaa yacacxaxaacxaxc yccxxaacxaxc ycxaacx ycxaacx cxycxaacx yccxxycxaayccxx ycxaycx aycxycx adMFdMF += ÷+= =− +−=− +−=− ++−=+− ++−=+− +−−=− ÷+−−=− −+−−= /+/+−/++−−=/+/++/ +−−=++ =+−+++ =+ f 12 2 2 2 =+ b y a x Analogamente, temos: Eq. genérica reduzida de uma elipse com focos e vértices sobre o eixo-y e simétricos em relação à origem. y x A ’ (0, -a) A(0,a) B ’ (-b,0) B(b,0) F(0,c) F ’ (0,-c) Eq. genérica reduzida de uma elipse com focos e vértices sobre o eixo-x e simétricos em relação à origem 12 2 2 2 =+ a y b x Figura 5.5
- 48. GEOMETRIA ANALÍTICA PLANA 48 Importante: Notemos que no caso da elipse, 22 baentãoba >> sendo 0, >ba , ou seja: o 2 a que nos indicará a posição dos focos e vértices será sempre o maior denominador na equação reduzida. 5.1.4 Excentricidade. Excentricidade é a razão a c e = que nos informa o quão achatada é uma elipse. Como 10 <<⇒> eca Outra fórmula para o cálculo da excentricidade: 2 2 2 22 22 22 222 222 1 a b e a ba e a ba e bac bac bca −=∴ − = − = −= −= =− Observações: Note que a excentricidade de uma elipse é um número compreendido no intervalo aberto (0,1). Uma elipse com uma excentricidade próxima de zero, é uma elipse menos achatada, ou mais arredondada, quanto menor a excentricidade mais arredondada será a elipse. No caso limite onde 0=c e, portanto 0=e teremos uma circunferência de raio a.
- 49. GEOMETRIA ANALÍTICA PLANA 49 Uma elipse com uma excentricidade próxima de 1, é uma elipse bastante achatada. Para que a excentricidade se aproxime de 1 é necessário que c fique próximo de a. Exercício resolvido: 1) Determinar a equação da elipse com focos no eixo-x, onde temos: I. = = 82 122 c a sol: 1 2036 20 1636 3616 46 22 2 2 2 222 =+∴= −= −= −= == yx b b b bac cea II. = = 2 1 62 e b sol: 4 1 1 9 9 1 4 1 9 1 2 1 1 3 2 2 2 2 2 2 2 −= −= −= −= = a a a a b e b 1 912 12 363 4 39 22 2 2 2 =+∴= = = yx a a a
- 50. GEOMETRIA ANALÍTICA PLANA 50 5.1.5 Exercícios propostos: 1) Determinar a equação reduzida da elipse nos seguintes casos: a) 2a = 10; 2c = 8 , com focos no eixo x b) 2b = 24; 2c = 10 , com focos no eixo y c) 2b = 12; e = 4 5 , com focos no eixo x 2) Determinar os elementos da elipse: a) 1 41 22 =+ yx b) 05102 22 =−+ yx 3) Determinar na elipse 1 425 22 =+ yx os pontos cujas abscissas são iguais a -3. 4) Determinar os pontos da elipse 1 36100 22 =+ yx cujas distâncias ao foco direito medem 14. 5) Determinar os pontos de interseção da reta 072 =−+ yx com a elipse 0254 22 =−+ yx . 6) Determinar a equação reduzida da elipse, cujo eixo maior está sobre o eixo y, sabendo que passa pelos pontos )22,2()14,1( −QeP . 7) Determinar a equação reduzida da elipse, com eixo maior sobre o eixo x, excentricidade 2 1 e que passa pelo ponto P(2,3). 8) Determinar as equações das circunferências inscrita e circunscrita à elipse 01616 22 =−+ yx . 9) Um satélite de órbita elíptica e excentricidade 3 1 viaja ao redor de um planeta situado num dos focos da elipse. Sabendo que a distância mais próxima do satélite ao planeta é de 300 km, calcular a maior distância. 10) O teto de um saguão com 10m de largura na base, tem a forma de uma semi- elipse com 9m de altura no centro e 6m de altura nas paredes laterais. Calcule a altura do teto a 2m de cada parede.
- 51. GEOMETRIA ANALÍTICA PLANA 51 Respostas: 1) a) 1 925 22 =+ yx b) 1 169144 22 =+ yx c) 1 36 11 576 22 =+ yx 2) a) ( ) = − − − 2 3 )3,0()3,0(' 0,1)0,1(' )2,0()2,0(' e FeF BeB AeA b) = − − − 5 2 )0,2()0,2(' 2 1 ,0 2 1 ,0' 0, 2 5 0, 2 5 ' e FeF BeB AeA 3) − −− 5 8 ,3 5 8 ,3 e 4) ( ) ( )27,527,5 −−− e 5) ( )2,3 2 3 ,4 e 6) 1 168 22 =+ yx 7) 1 1216 22 =+ yx 8) 116 2222 =+=+ yxeyx 9) kmd 600= 10) mh 4,8=
- 52. GEOMETRIA ANALÍTICA PLANA 52 5.2 A Hipérbole. Assim como a elipse, a hipérbole também é uma curva plana, formada por um conjunto de infinitos pontos de 2 R . Sua definição matemática é a seguinte: Hipérbole é o conjunto de infinitos pontos de um plano cuja diferença das distâncias a dois pontos fixos deste plano (focos) é, em valor absoluto, uma constante (k). Cada hipérbole tem a sua constante k. Figura 5.6 kFdMFdMhipérboleMn nn =−⇒∈ ' y xF ’ F Mn M2 M1 π
- 53. GEOMETRIA ANALÍTICA PLANA 53 5.2.1 Elementos da Hipérbole. A figura 5.7 mostra uma hipérbole com centro na origem do sistema cartesiano. Figura 5.7 Seus principais elementos são: • Eixo transverso (ou real): é o segmento A’A, cuja medida vale 2a; • Eixo conjugado (ou imaginário): é o segmento B’B, cuja medida vale 2b; • Vértices: são os pontos )0,()0,(' aAeaA − ; • Focos: são os pontos fixos )0,()0,(' cFecF − , a distância focal (entre focos) mede 2c; • Assíntotas: são as retas x a b yx a b y =−= e . by −= ax −= ax = by = F’(-c,0) F(c,0) y x x a b y =x a b y −= B’(0,-b) A’(-a,0) B(0,b) A(a,0) Obs: Os focos estão sobre o eixo x e simétricos em relação à origem
- 54. GEOMETRIA ANALÍTICA PLANA 54 Importante: A constante k, característica de cada hipérbole, é igual ao comprimento de seu eixo transverso 2a. Então: ak 2= Podemos provar esta afirmação utilizando o ponto )0,(aA que pertence à hipérbole e por isso deve satisfazer à condição: kdAFdAF =−' de fato: 02 2 , )()( ' >= = =+−+ =−−+ =− apoisak ak kacca então kacca kdAFdAF 5.2.2 Equações Reduzidas Genéricas da Hipérbole. Vamos determinar uma equação genérica reduzida para todas as hipérboles com focos e vértices sobre um dos eixos coordenados e simétricos em relação à origem. A figura 5.8 mostra uma hipérbole cujos elementos estão com coordenadas genéricas em relação ao sistema cartesiano. Determinaremos sua equação aplicando a definição matemática. Definição matemática
- 55. GEOMETRIA ANALÍTICA PLANA 55 Figura 5.8 Seja o ponto genérico hipérboleyxM ∈),( : 2: ' então adMFdMFmatemáticaDefinição =− aycxycx 2)()( 2222 =+−−++ Eliminando os radicais, simplificando e fazendo: 222 bac =− encontramos: 12 2 2 2 =− b y a x Eq. genérica de uma hipérbole com focos e vértices sobre o eixo-x e simétricos em relação à origem. Relação importante: 222 bac += A(-a,0)F’(-c,0) F(c,0)A(a,0) M(x,y) x y
- 56. GEOMETRIA ANALÍTICA PLANA 56 Analogamente: Importante: Na equação reduzida da hipérbole o 2 a também nos indicará a posição dos focos e vértices e neste caso será sempre o denominador da parcela positiva. nota: se ba = temos o que chamamos de hipérbole eqüilátera. 5.2.3 Excentricidade. Também é calculada pela razão a c e = que nos dá a abertura dos ramos da hipérbole. Como ac > a excentricidade da hipérbole sempre será 1> . Outra fórmula para o cálculo da excentricidade: 2 2 2 22 22 22 222 222 1 a b e a ba e a ba e bac bac bac +=∴ + = + = += += =− F’ A’ A F 12 2 2 2 =− b x a y Eq. genérica de uma hipérbole com focos e vértices sobre o eixo-y e simétricos em relação à origem.
- 57. GEOMETRIA ANALÍTICA PLANA 57 Exercícios resolvidos: 1) Determinar as coordenadas dos focos e vértices das hipérboles: a) 3694 22 =− yx b) 822 =− xy c) 22 22 =− yx sol: a) 36 36 36 9 36 4 22 =− yx 1 49 22 =− yx 49 22 == bea 1313 49 2 2 222 =⇒= += += cc c bac ∴ b) 8 8 88 22 =− xy 1 88 22 =− xy 88 22 == bea Focos e vértices estão sobre o eixo y. )8,0()8,0(' )4,0()4,0('4 162 222 AeA FeFc c bac − −∴= = += ( ) ( ) ( ) ( )0,30,3' 0,130,13' AeA FeF − − Focos e vértices estão sobre o eixo x.
- 58. GEOMETRIA ANALÍTICA PLANA 58 c) 2 2 22 2 22 =− yx 1 21 22 =− yx 21 22 == bea Focos e vértices estão sobre o eixo x. )0,1()0,1(' )0,3()0,3('3 212 222 AeA FeFc c bac − −∴= += += 2) Obter a equação da hipérbole, com centro na origem do sistema cartesiano, nos casos: a) 2a = 8 e um dos focos é (5,0) 2c = 10 ⇒ c = 5 ⇒ c 2 = 25 c 2 = a 2 + b 2 b 2 = c 2 – a 2 b 2 = 25 – 16 b 2 = 9 b) 2b = 2 e um dos focos é (-2,0) 2b = 2 ⇒ b = 1 ⇒ b 2 = 1 2c = 4 ⇒ c = 2 ⇒ c 2 = 4 c 2 = a 2 + b 2 a 2 = c 2 – b 2 a 2 = 4 – 1 a 2 = 3 O eixo transverso está contido no eixo x. ⇒=− 12 2 2 2 b y a x 1 916 22 =− yx O eixo transverso está contido no eixo x. ⇒=− 12 2 2 2 b y a x 1 13 22 =− yx
- 59. GEOMETRIA ANALÍTICA PLANA 59 c) 2a = 6 e um dos focos é (0,-5) 2a = 6 ⇒ a = 3 ⇒ a 2 = 9 2c = 10 ⇒ c = 5 ⇒ c 2 = 25 c 2 = a 2 + b 2 b 2 = c 2 – a 2 b 2 = 25 – 9 b 2 = 16 5.2.4 Exercícios propostos: 1) Determinar a equação da hipérbole cujos focos estão no eixo das ordenadas e simétricos em relação à origem. a) a = 6; b = 18 b) 2c = 10; 3 5 =e 2) Verificar se o ponto − 4 9 ,5M pertence à hipérbole 0144169 22 =−− yx . 3) Determinar a equação da hipérbole cujos focos são simétricos em relação à origem e estão no eixo x, sabendo: a) P(6,-1) e Q (-8, 22 ) ∈ hipérbole; b) −1, 2 9 P ∈ hipérbole e xy 3 2 ±= são as equações das assíntotas. 4) Achar os pontos de interseção da reta 0102 =−− yx com a hipérbole 1 520 22 =− yx . 5) Esboçar o gráfico da hipérbole eqüilátera 922 =− yx . O eixo transverso está contido no eixo y. ⇒=− 12 2 2 2 b x a y 1 169 22 =− xy
- 60. GEOMETRIA ANALÍTICA PLANA 60 Respostas: 1) a) 1 32436 22 =− xy b) 1 169 22 =− xy 2) Pertence 3) a) 1 832 22 =− yx b) 1 818 22 =− yx 4) ( )2,6 3 2 , 3 14 e −
- 61. GEOMETRIA ANALÍTICA PLANA 61 5.3 A Parábola. Uma das curvas planas mais conhecidas e com várias aplicações na matemática e na engenharia é a parábola cuja definição matemática é: Um conjunto de infinitos pontos de um plano que são eqüidistantes de uma reta diretriz (d) e de um ponto fixo, foco (F), deste plano. O foco não pertence à diretriz. Figura 5.9 )(ddMFdMparábolaMn nn =⇒∈ y π F (d) diretriz nM
- 62. GEOMETRIA ANALÍTICA PLANA 62 5.3.1 Elementos da Parábola. A figura 5.10 mostra uma parábola com vértice na origem do sistema cartesiano, concavidade voltada para a direita e foco sobre o eixo x. Figura 5.10 Os elementos desta curva são: • Foco: é o ponto fixo F ; • Diretriz: é a reta fixa (d); • Eixo: é a reta que contém o foco e é perpendicular à diretriz; • Vértice: é o ponto de interseção da parábola com seu eixo; • Parâmetro*: chamaremos de parâmetro (P) a distância do foco ao vértice, sendo então 2p a distância do foco à diretriz; • Lado reto: é o segmento cujos extremos são pontos da parábola, é perpendicular ao eixo e passa pelo foco. * alguns autores consideram o parâmetro p como sendo a distância entre o foco e a diretriz. Neste caso a distância entre o foco e o vértice é 2 p . y x F(p,0) -p v L R (d) x=-p
- 63. GEOMETRIA ANALÍTICA PLANA 63 Como já foi dito, estudaremos primeiramente as equações reduzidas das parábolas. Neste caso o plano cartesiano terá a sua origem coincidindo com o vértice da parábola cujo eixo, e conseqüentemente seu foco, estará sobre um dos eixos coordenados. 5.3.2 Equações Reduzidas da Parábola. Seja o ponto genérico parábolayxM ∈),( )(: ddMdMFmatemáticaDefinição = (d) 00 =++ −= pyx oupx 22 00 2 12 2 12 )()( : ba cbyax dpr yyxxd lembrarpara + ++ = −+−= y x F(p,0) -p v M(x,y)
- 64. GEOMETRIA ANALÍTICA PLANA 64 += + ++ = +−= px pyx ddM ypxdMF 01 .0.1 )( )( 2 22 ( ) pxyppxxyPpxx pxypx pxypx então 422 )( )( 222222 22 22 22 =∴++=++− +=+− +=+− podemos concluir por analogia que temos quatro tipos de equações reduzidas para as parábolas. Eq. genérica reduzida de uma parábola com a concavidade voltada para a direita. x=-p y x F(p,0)-p pxy 42 = x=p y x F(-p,0) p pxy 42 −= F(0,p) y x -p y=-p pyx 42 = y x p F(0,-p) y=p pyx 42 −=
- 65. GEOMETRIA ANALÍTICA PLANA 65 Exercícios resolvidos: 1) Esboçar o gráfico, dar as coordenadas do foco e a equação da diretriz da parábola 042 =− xy sol: xy 42 = vamos comparar a equação dada com a equação genérica pxy 42 = 1 444 4 2 2 = =⇒= = p ppxy xy 2) Determine a equação da parábola cujo foco é − 0, 2 1 F e a diretriz é a reta 012 =−x sol: a equação da diretriz pode ser escrita como 2 1 =x pela posição do foco e da diretriz podemos concluir que trata-se de uma parábola com vértice na origem e concavidade voltada para a esquerda cuja equação genérica é pxy 42 −= seu parâmetro p vale 2 1 . então: xy xy 2 . 2 1 .4 2 2 −= ∴ −= x=-1 y x F(1,0)-1 xy 42 =
- 66. GEOMETRIA ANALÍTICA PLANA 66 5.3.3 Exercícios propostos: 1) Para cada uma das parábolas abaixo, construir o gráfico e encontrar o foco e a equação da diretriz: a) yx 42 −= b) xy 62 = c) xy 82 −= d) 02 =+ yx e) 02 =− xy f) 032 =+ xy g) 0102 =− yx h) 092 2 =− xy i) 16 2 x y = j) 12 2 y x −= 2) Determinar a equação da parábola com vértice na origem, eixo sobre o eixo y e que passa pelo ponto M(6,3). 3) Um arco parabólico tem uma altura de 2,0m e uma largura de 3,6m na base. Se o vértice da parábola está no topo do arco, a que altura sobre a base o arco tem uma largura de 1,8m? 4) Um telescópio refletor tem um espelho parabólico para o qual a distância do vértice ao foco é 30cm. Se o diâmetro do espelho é 10cm, qual a sua profundidade? 5) Admita que a água que escoa do final de um tubo horizontal que está a 2,5m do chão descreva uma curva parabólica. O vértice da parábola está no final do tubo. Se em um ponto a 80cm abaixo da linha do tubo o fluxo d’água curvou- se 1,0m além da reta vertical que passa pelo fim do tubo, a que distância desta reta a água tocará o chão? 6) A diretriz da parábola pxy 42 = é tangente à circunferência que tem o foco da parábola como centro. Ache a equação da circunferência e os pontos de interseção das duas curvas.
- 67. GEOMETRIA ANALÍTICA PLANA 67 7) Prove que o comprimento do lado reto de qualquer parábola é 4p. Respostas: 1) a) 1;)1,0( =− yF b) 2 3 ;0, 2 3 −= xF c) ( ) 2;0,2 =− xF d) 4 1 ; 4 1 ,0 = − yF e) 4 1 ;0, 4 1 −= xF f) 4 3 ;0, 4 3 = − xF g) 2 5 ; 2 5 ,0 −= yF h) 8 9 ;0, 8 9 −= xF i) ( ) 4;4,0 −=yF j) ( ) 3;0,3 =− xF 2) yx 122 = 3) m5,1 4) cm208,0 5) m77,1 6) )2,()2,(;032 222 ppeppppxyx −=−−+
- 68. GEOMETRIA ANALÍTICA PLANA 68 Capítulo 6 Translação de Eixos Coordenados. 6.1 Objetivo. Como vimos nos capítulos anteriores, podemos determinar equações para algumas curvas planas em relação a um determinado referencial. Se o referencial mudar de posição no plano em relação à curva, esta terá sua equação modificada. A figura 6.1 mostra uma curva plana qualquer e três sistemas de referência num mesmo plano. Figura 6.1 Como temos três sistemas de referência diferentes podemos determinar três equações diferentes para a mesma curva em questão. Na verdade podemos determinar infinitas equações para uma mesma curva plana, pois podemos posicionar um sistema de referência em qualquer lugar do plano. O Y’ X’O’ Y X Y’’ X’’O’’
- 69. GEOMETRIA ANALÍTICA PLANA 69 Em relação aos três sistemas da figura 6.1, nenhum deles nos dará uma equação reduzida para a curva, que é uma elipse, pois obviamente os focos e vértices da mesma não estão sobre nenhum eixo. Para obtermos uma equação reduzida para a elipse acima temos que posicionar um novo sistema de referência num local que atenda às exigências que vimos no capítulo 5. Este procedimento é o que chamamos de Translação de Eixos Coordenados. Então, o objetivo de uma translação de eixos coordenados é reduzir as equações de algumas curvas a uma forma mais simples. Numa translação de eixos não alteramos as características originais do sistema de referência, apenas mudamos de lugar, ou seja: dois sistemas cartesianos ''' YoXeXoY são transladados quando os eixos '''' YoeXo são respectivamente paralelos aos eixos .oYeoX Figura 6.2 O Y’ X’O’ Y X oYYoeoXXotranslaçãoexiste //// '''' ⇔
- 70. GEOMETRIA ANALÍTICA PLANA 70 Para ilustrar o que acabamos de ver, vamos resolver o seguinte exercício: Determinar a equação geral da circunferência cujo centro é )4,3(c e o raio .2=r 1. Em relação ao plano .XoY 02186 0416896 2)4()3( )()( 22 22 222 222 =+−−+ =−+−++− =−+− =−+− yxyx yyxx yx rkyhx 2. Agora vamos determinar a equação da mesma circunferência em relação ao sistema ''' YoX com eixos paralelos aos do sistema XoY e com sua origem no centro da circunferência. O Y X C(3,4) 2 X X’ Y’ O’ O Y C(3,4) 2 sol: 4)()( 2'2' =+ yx pois o centro da circunferência é o ponto (0,0) do sistema ''' YoX
- 71. GEOMETRIA ANALÍTICA PLANA 71 Conclusão: Podemos observar que a equação da circunferência ficou bem mais simples em relação ao novo sistema transladado, inclusive os termos do 1º grau sumiram. Para uma translação bem feita, temos que saber onde posicionar a origem do novo sistema. No caso de uma circunferência, teremos uma equação reduzida se a origem do sistema coincidir com seu centro. Veremos a seguir como identificar a melhor localização do sistema de referência para as outras curvas cônicas. 6.2 Relação Entre os Sistemas ''' YoXeXoY dados: PPonto YoXSistema XoYSistema ''' Figura 6.3 os pontos o’ e P possuem dois pares de coordenadas pois existem dois sistemas de referência no plano O Y’ X’ )0,0( ),(' kh o Y X ),( ),( '' yx yx P A2(x) B’(y’) A1(h) B1(k) B2(y) A’(x’)
- 72. GEOMETRIA ANALÍTICA PLANA 72 Importante: ),( kh é a origem do sistema transladado ''' yox em relação ao sistema original xoy . Tomando as projeções dos pontos o’ e P nos eixos coordenados, podemos dizer que: kyyBBOBOB hxxxhx então xAoAA hOA xOA masAAOAOA +=⇒+= +=⇒+= == = = += ' 2112 '' ''' 21 1 2 2112 : Concluindo: as relações += += kyy hxx ' ' serão utilizadas para determinar a origem ( )kh, do sistema de referência transladado ( )''' YoX .
- 73. GEOMETRIA ANALÍTICA PLANA 73 Exercícios resolvidos: Dada a equação da cônica abaixo, pede-se: • Identificá-la; • Determinar seus elementos; • Fazer um esboço do gráfico. 011191281501625 22 =−−++ yxyx Esta é a equação de uma elipse, pois podemos identificar dois termos do 2º grau, ambos positivos. Como sabemos, as equações reduzidas das elipses possuem dois termos do 2º grau e um termo independente. Então para obter uma equação reduzida, sem os termos do 1º grau, que represente a mesma curva acima temos que utilizar um sistema de referência transladado. Para mudar de sistema de referência utilizamos a seguinte relação: += += kyy hxx ' ' ( ) 1 100 )( 64 )( 1600)(16)(25 , 4,34012832 3015050 ,1 011191281501625)12832()15050()(16)(25 011191281281501501632)(162550)(25 01119)(128)(150)(16)(25 2'2' 2'2' ' 22''2'2' ''2'2'2'2' ''2'2' =+ =+ −∴=⇒=− −=⇒=+ =−−+++−++++ =−−−+++++++ =−+−+++++ yx ou yx ficaequaçãonakehdosubstituin okh hh temosgraudotermososanulando khkhykxhyx parcelasasordenando kyhxkkyyhhxx kyhxkyhx o Equação reduzida de uma elipse em relação ao plano x’o’y’ com focos sobre o eixo-y’.
- 74. GEOMETRIA ANALÍTICA PLANA 74 Determinando seus elementos: )6,0()6,0( )10,0()10,0( 6 64100 64 10100 ' ' 222 2 2 FeF AeA c c bac b aa − − ∴ = −= −= = =⇒= 6.3 Exercícios propostos: 1) Determine a equação da elipse cujo centro está no ponto C(1,4), um foco é o ponto F(5,4) e a excentricidade é 3 2 . 2) Determine a equação da elipse com eixo maior igual a 10 e focos F’(2,-1) e F(2,5). 3) Determine a equação da elipse com centro no ponto C(-3,0), um foco em F(-1,0) e que é tangente ao eixo y. 4) Faça um esboço do gráfico das seguintes elipses: a) 0369636169 22 =++−+ yxyx b) 031164501625 22 =−+++ yxyx 5) Determine a equação da hipérbole com centro no ponto C(3,2), um vértice em A(1,2) e um foco em F(-1,2). 6) Determine a equação da hipérbole com vértices em (3,-2) e (5,-2) e um foco em (-1,-2). 7) Determine a equação da hipérbole com vértices em (5,-1) e (5,5) e excentricidade 2. 8) Faça um esboço do gráfico das seguintes hipérboles: a) 043161849 22 =−−−− yxyx b) 01991864916 22 =+−−− yxyx X’ XO YY’ O’(-3,4) Curva fora da escala
- 75. GEOMETRIA ANALÍTICA PLANA 75 9) Determine a equação da parábola cujo vértice é o ponto V(-2,3) e o foco é o ponto F(-2,1). 10) Determine a equação da parábola cujo foco é F(-7,3) e a diretriz é a reta 03 =+x . 11) Determine a equação da parábola que tem seu vértice no ponto V(4,-3), seu eixo paralelo ao eixo x, e que passa pelo ponto P(2,1). 12) Faça um esboço do gráfico das seguintes parábolas: a) 012842 =+++ yxx b) 0392022 =−−− yxx c) 0441642 =−++ xyy d) 0492162 =++− yxy Respostas: 1) 031721095 22 =−−−+ yxyx 2) 0236641001625 22 =−−−+ yxyx 3) 03095 22 =++ xyx 4) a) )3,2(' −O b) )2,1(' −−O 5) 0114183 22 =++−− yxyx 6) 0356419224 22 =+−−− yxyx 7) 04012103 22 =++−− yxyx 8) a) )2,1(' −O b) )1,2(' −O 9) 020842 =−++ yxx 10) 049682 =+−+ yxy 11) 023682 =−++ yxy 12) a) )1,2(' −−O b) )2,1(' −O c) )2,3(' −O d) )1,3(' −O
- 76. GEOMETRIA ANALÍTICA PLANA 76 Capítulo 7 Noções do Sistema de Coordenadas Polares. 7.1 Introdução. Veja a figura 7.1 abaixo. Figura 7.1 Para localizar o ponto M no plano π nós precisamos de um sistema de referência. Até agora o único que conhecemos é o Plano Cartesiano ou Sistema de Coordenadas Retangulares. Vamos ver então uma outra forma ou um outro sistema para localizar o ponto M: • Traçamos uma semi-reta OX no plano π ; π M π M O θ X ρ )
- 77. GEOMETRIA ANALÍTICA PLANA 77 • Medimos a distância orientada do ponto O (origem da semi-reta) ao ponto M. Chamaremos esta distância de ρ (ro); • ρ=dOM ; • Medimos o ângulo θ , positivo no sentido anti-horário, formado a partir do eixo OX até o segmento OM; • O ponto M fica bem determinado no plano pelo par ordenado ),( ρθ ; • Este par ordenado faz parte do sistema de Coordenadas Polares. 7.2 Elementos. Figura 7.2 Vejamos: Seja o ponto 5, 6 π A M O θ X ρ pólo eixo polar ângulo polar raio polar 5, 6 π A O X
- 78. GEOMETRIA ANALÍTICA PLANA 78 O sistema de coordenadas polares não possui a característica biunívoca do sistema de coordenadas cartesianas, ou seja, cada ponto do plano pode ser representado por infinitos pares ordenados do tipo ),2( ρθπ +kP Como exemplo, vamos verificar que podemos representar o ponto 5, 6 π A de várias formas: + + −+ − −− 5, 6 2 5,2 6 5, 6 5, 6 11 5, 6 5 π π π π π π π π kA A A A A 7.3 Relação entre os Sistemas Cartesiano e Polar. Podemos definir uma relação entre os sistemas polar e cartesiano para transformar equações de curvas de um sistema para outro. Vamos notar que algumas curvas possuem equações mais simples em relação a um determinado sistema de referência. Por exemplo, as cônicas geralmente têm suas equações mais simplificadas no sistema polar. A figura 7.3 abaixo mostra um ponto P representado nos dois sistemas, cartesiano e polar, onde suas origens coincidem num mesmo ponto e o eixo polar se sobrepõe ao eixo cartesiano das abscissas. xeixoOX ≡),( ),( ρθ yx P O θ X ρ x Y y )(1 xP )(2 yp
- 79. GEOMETRIA ANALÍTICA PLANA 79 PolarCartesiano → )sen,cos(),( sen. cos. 1 θρθρ θρ θρ →∴ = = ⇒∆ yx y x retânguloéPOP CartesianoPolar → +→∴ += = 22 22 ,),( yx x y arctg yx x y arctg ρθ ρ θ Exercícios resolvidos: 1) Passar a equação cartesiana 0632 =+− yx para a forma polar. sol: θθ ρ θθρ θρθρ θρθρ θρ θρ sen3cos2 6 6)sen3cos2( 6sen3cos2 06)sen(3)cos(2 : sen cos − − = −=− −=− =+− = = então y x
- 80. GEOMETRIA ANALÍTICA PLANA 80 2) Passar a equação polar θ ρ cos2 4 − = para a forma cartesiana. sol: ( ) ( ) ( ) 016843 081644 8164 42 42 4cos2 : 22 222 222 2 2 22 22 22 =−−+ =−−−+ ++=+ +=+ =−+ =− += xyx xxyx xxyx xyx xyx entao yx θρρ ρ 3) Passar a equação polar θ ρ cos 3 = para a forma cartesiana. sol: 3 3cos = = x θρ
- 81. GEOMETRIA ANALÍTICA PLANA 81 Apêndice I Álgebra 1. Lei dos Expoentes n mnmmnnmmmmnmnm aaaabaabaaa ==== + / ;)(;)(; Se :0≠a m mnm n m a aaa a a 1 ;1; 0 === −− 2. Zero (a divisão por zero não é definida) Se :0≠a 00,1,0 0 0 === a a a Para qualquer número a: 0.00. == aa 3. Frações b a b a b a c d b a dc ba bd ac d c b a bd bcad d c b a − =−= − ⋅==⋅ + =+ ; / / ;; 4. Produtos Notáveis 32233 222 33)( 2)( babbaaba bababa +++=+ ++=+ 5. Diferença de Potências Inteiras Iguais ))(( ))(( ))(( 322344 2233 22 babbaababa babababa bababa +++−=− ++−=− +−=− 6. Fórmula Quadrática (Báskara) Se 0≠a , 02 =++ cbxax a acbb x 2 42 −±− =
- 82. GEOMETRIA ANALÍTICA PLANA 82 Apêndice II Trigonometria 1. Definições e Identidades Fundamentais Seno: θ θ ecr y sen cos 1 == Cosseno: θ θ sec 1 cos == r x Tangente: θ θ gx y tg cot 1 == 2. Identidades tgBtgA tgBtgA BAtg tgBtgA tgBtgA BAtg senBsenABABA senBsenABABA senBABsenABAsen senBABsenABAsen sen sensensen gectgsen sensen + − =− − + =+ +=− −=+ −=− +=+ − = + = −== +=+==+ =−−=− 1 )( 1 )( coscos)cos( coscos)cos( coscos)( coscos)( 2 2cos1 ; 2 2cos1 cos cos2cos;cos22 cot1cos;1sec;1cos cos)cos(;)( 22 22 222222 θ θ θ θ θθθθθθ θθθθθθ θθθθ senAAAAsen senAAAAsen −= += + = −−= − 2 cos;cos 2 2 cos;cos 2 ππ ππ x y P(x,y) x y r 0 θ
- 83. GEOMETRIA ANALÍTICA PLANA 83 Apêndice III Geometria 1. Cevianas Ceviana é um segmento de reta, ou semi-reta, que liga um vértice do triângulo ao lado oposto correspondente ou ao do seu prolongamento. São exemplos de cevianas a Mediana, a Altura e a Bissetriz. Mediana de um triângulo é o segmento de reta que liga um vértice deste triângulo ao ponto médio do lado oposto a este vértice. As três medianas de um triângulo são concorrentes e se encontram no centro de massa, ou baricentro do triângulo. Altura é um segmento de reta perpendicular a um lado do triângulo ou ao seu prolongamento, traçado pelo vértice oposto. O ponto de interseção das três alturas de um triângulo denomina-se ortocentro. Bissetriz é a semi-reta que divide um ângulo em dois ângulos congruentes. As três bissetrizes internas de um triângulo se encontram no centro de uma circunferência inscrita ao triângulo, ou incentro.
- 84. GEOMETRIA ANALÍTICA PLANA 84 2. Mediatriz Mediatriz é a reta perpendicular a um lado do triângulo, traçada pelo seu ponto médio. As três mediatrizes de um triângulo se encontram em um único ponto, o circuncentro, que é o centro da circunferência circunscrita ao triângulo, que passa pelos três vértices do triângulo. 3. Fórmulas de Geometria Plana
- 85. GEOMETRIA ANALÍTICA PLANA 85 Apêndice IV – Seções Cônicas As curvas cônicas são conhecidas e estudadas há muitos séculos. Os trabalhos mais antigos sobre o assunto foram feitos por Menaechmus (380 – 320 a.C.), Aristeu e Euclides. Mas foi Apolônio, conhecido como “O Grande Geômetra” que nasceu por volta de 262a.C. em Perga, no sul da Ásia Menor e morreu por volta de 190a.C. em Alexandria, que desenvolveu um estudo mais completo e detalhado sobre as seções cônicas. Sua grande obra Seções Cônicas supera completamente os trabalhos anteriores sobre o assunto (EVES, 1997). FIGURA 1 – Seções cônicas não degeneradas Na FIG. 1, vê-se a obtenção das seções cônicas como cortes de um plano em uma superfície cônica de revolução. Variando o ângulo do plano em relação ao eixo da superfície cônica, obtêm-se as diferentes curvas cônicas. (FIG. 2). FIGURA 2 – Variação do ângulo do plano de corte
- 86. GEOMETRIA ANALÍTICA PLANA 86 A circunferência também é considerada uma cônica, pois pode ser obtida quando um plano secciona uma superfície cônica perpendicularmente ao eixo. Existem ainda, as chamadas cônicas degeneradas que ocorrem quando o plano intercepta a superfície cônica em seu vértice e dependendo de seu ângulo surgem um ponto, uma reta ou duas retas concorrentes, (FIG. 3). FIGURA 3 – Cônicas degeneradas a) uma reta b) um ponto c) duas retas concorrentes Winterle (2000), descreve como obter uma “superfície cônica” a partir de duas retas (FIG. 5). “Sejam duas retas e e g concorrentes em o e não- perpendiculares. Conservemos fixa a reta e e façamos g girar 360 graus em torno de e mantendo constante o ângulo entre estas retas. Nestas condições, a reta g gera uma superfície cônica circular infinita formada por duas folhas separadas pelo vértice o.” FIGURA 1 – Superfície cônica e g o
- 87. GEOMETRIA ANALÍTICA PLANA 87 No início os matemáticos estudavam estas elegantes curvas sem maiores preocupações com aplicações práticas. Mas ao longo do tempo inúmeras descobertas importantes em matemática pura e na ciência em geral estavam ligadas às seções cônicas. Dois exemplos clássicos são, a descoberta de Galileu Galilei que em 1604 descobriu que um projétil que era lançado horizontalmente do topo de uma torre tinha uma trajetória em forma de parábola se considerando atuante apenas a força da gravidade e a publicação de Kepler em 1609 de sua descoberta de que a órbita de Marte em torno do Sol era uma elipse, lançando a hipótese que todos os planetas se moveriam em órbitas elípticas, o que foi comprovado décadas mais tarde por Isaac Newton. (EVES, 1997).
- 88. GEOMETRIA ANALÍTICA PLANA 88 Descartes, por vezes chamado o fundador da filosofia moderna e o pai da matemática moderna, é considerado um dos pensadores mais importantes e influentes da história humana. Ele inspirou os seus contemporâneos e gerações de filósofos. Na opinião de alguns comentadores, ele iniciou a formação daquilo a que hoje se chama de Racionalismo continental (supostamente em oposição à escola que predominava nas ilhas britânicas, o Empirismo), posição filosófica dos séculos XVII e XVIII na Europa O interesse de Descartes pela matemática surgiu cedo, no “College de la Fleche”, escola do mais alto padrão, dirigida por jesuítas, na qual ingressara aos oito anos de idade. Mas por uma razão muito especial e que já revelava seus pendores filosóficos: a certeza que as demonstrações ou justificativas matemáticas proporcionam. Aos vinte e um anos de idade, depois de freqüentar rodas matemáticas em Paris (além de outras) já graduado em Direito, ingressa voluntariamente na carreira das armas, uma das poucas opções “dignas” que se ofereciam a um jovem como ele, oriundo da nobreza menor da França. Durante os quase nove anos que serviu em vários exércitos, não se sabe de nenhuma proeza militar realizada por Descartes. É que as batalhas que ocupavam seus pensamentos e seus sonhos travavam-se no campo da ciência e da filosofia. A Geometria Analítica de Descartes apareceu em 1637 no pequeno texto chamado “A Geometria” como um dos três apêndices do Discurso do método, obra considerada o marco inicial da filosofia moderna. Nela, em resumo, Descartes defende o método matemático como modelo para a aquisição de conhecimentos em todos os campos. Fonte: Wikipédia René Descartes (31 de Março de 1596, La Haye en Touraine, França — 11 de Fevereiro de 1650, Estocolmo, Suécia), também conhecido como Renatus Cartesius, foi um filósofo, um físico e matemático francês. Notabilizou-se sobretudo pelo seu trabalho revolucionário da Filosofia, tendo também sido famoso por ser o inventor do sistema de coordenadas cartesiano, que influenciou o desenvolvimento do Cálculo moderno.
- 89. GEOMETRIA ANALÍTICA PLANA 89 Bibliografia. LEITHOLD, Louis. O Cálculo com Geometria Analítica – São Paulo: Harbra Ltda, 1994, 3ª edição. SIMMONS, George F. Cálculo com Geometria Analítica – São Paulo: Mc Graw- Hill, 1987. JÚDICE, Edson Durão. Elementos de Geometria Analítica – Belo Horizonte: Sistema Pitágoras de Ensino, 1976, 2ª edição. WINTERLE, Paulo. Vetores e Geometria Analítica – São Paulo: Makron Books do Brasil Editora Ltda, 2000. BOULOS, Paulo, CAMARGO, Ivan de. Geometria Analítica: um tratamento vetorial – São Paulo: Mc Graw-Hill, 1987, 2ª edição. SWOKOWSKI, Earl W. Cálculo com Geometria Analítica, Vol 2 – São Paulo: Makron Books do Brasil Editora Ltda, 1994, 2ª edição. REIS, Genésio Lima dos; SILVA, Valdir Lima da. Geometria Analítica – Rio de Janeiro: Livros Técnicos e Científicos, 1984. KLETENIK, D. Problemas de Geometria Analítica – Moscou: Editora Mir, 1968. EVES, Howard. Introdução à História da Matemática – Campinas: Editora da Unicamp, 1997