
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Tutorial de Simulink
Similar to Tutorial de Simulink (20)
Recently uploaded
Recently uploaded (20)
Tutorial de Simulink
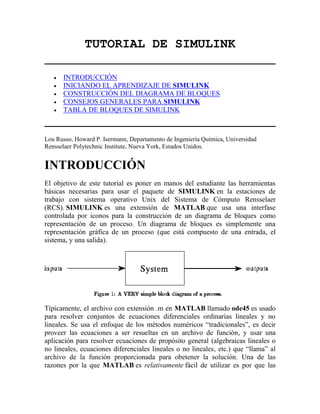
- 1. TUTORIAL DE SIMULINK INTRODUCCIÓN INICIANDO EL APRENDIZAJE DE SIMULINK CONSTRUCCIÓN DEL DIAGRAMA DE BLOQUES CONSEJOS GENERALES PARA SIMULINK TABLA DE BLOQUES DE SIMULINK Lou Russo, Howard P. Isermann, Departamento de Ingeniería Química, Universidad Rensselaer Polytechnic Institute, Nueva York, Estados Unidos. INTRODUCCIÓN El objetivo de este tutorial es poner en manos del estudiante las herramientas básicas necesarias para usar el paquete de SIMULINK en la estaciones de trabajo con sistema operativo Unix del Sistema de Cómputo Rensselaer (RCS). SIMULINK es una extensión de MATLAB que usa una interfase controlada por iconos para la construcción de un diagrama de bloques como representación de un proceso. Un diagrama de bloques es simplemente una representación gráfica de un proceso (que está compuesto de una entrada, el sistema, y una salida). Típicamente, el archivo con extensión .m en MATLAB llamado ode45 es usado para resolver conjuntos de ecuaciones diferenciales ordinarias lineales y no lineales. Se usa el enfoque de los métodos numéricos “tradicionales”, es decir proveer las ecuaciones a ser resueltas en un archivo de función, y usar una aplicación para resolver ecuaciones de propósito general (algebraicas lineales o no lineales, ecuaciones diferenciales lineales o no lineales, etc.) que “llama” al archivo de la función proporcionada para obetener la solución. Una de las razones por la que MATLAB es relativamente fácil de utilizar es por que las
- 2. “aplicaciones para resolver ecuaciones” son dadas para nosotros, y accedemos a estas a través de una interfase de línea de comandos (CLI) (aquí el indicador de MATLAB, >>). Sin embargo, SIMULINK usa una interfase gráfica de usuario (GUI) para resolver las simulaciones de los procesos. En vez de escribir código MATLAB, simplemente conectamos los “iconos” necesarios entre sí para construir el diagrama de bloques. Los “icons” representan las posibles entradas al sistema, las partes del sistema, o las salidas del sistema. SIMULINK le permite al usuario simular fácilmente sistemas de ecuaciones diferenciales ordinarias lineales y no lineales. Se requiere tener buenas bases en algebra matricial y en sistemas de parámetros concentrados, así como una buena comprensión del funcionamiento de MATLAB, y recomendamos insistiendo en esto que el estudiante lea y practique por medio de este tutorial. Muchas de las características de SIMULINK son amistosas con el usuario debido a la interfase controlada por iconos, por eso es importante pasar el tiempo de estudio experimentando con SIMULINK y sus muchas características. Los paquetes de simulación dinámica (tales como MATLAB, SIMULINK, etc.) están siendo usados cada vez más de manera frecuente en las industrias de procesos químicos para simulación de procesos y diseño del sistema de control. Después de completar este tutorial, el estudiante debería ser capaz de “construir” y simular representaciones de sistemas dinámicos por medio de diagramas de bloques. INICIANDO EL APRENDIZAJE DE SIMULINK SIMULINK es un paquete que incorpora los últimos adelantos en simulación dinámica controlada por iconos, el cual le permite al usuario especificar una representación de un proceso dinámico por medio de un diagrama de bloques. Las secciones variadas del diagrama de bloques son representadas por iconos que se encuentran disponibles por medio de varias “ventanas” que el usuario abre (mediante una doble pulsación en el icono). El diagrama de bloques está compuesto de iconos que representan las diferentes secciones del proceso (entradas, modelos de espacio de estado, funciones de transferencia, salidas, etc.) y conexiones entre los iconos (que se realizan al “dibujar” una línea que va a conectar los iconos). Una vez que el diagrama de bloques esté “construído”, hay que especificar los parámetros en los diferentes bloques, por ejemplo la ganancia de una función de transferencia. Una vez que los parámetros sean especificados, el usuario tiene que definir el método de integración (de las ecuaciones dinámicas), tamaño del paso, tiempos de inicio y de final en la integración, etc. en el menu de simulación de la ventana del diagrama de bloques.
- 3. Para usar SIMULINK el estudiante debe “empezar” una sesión de MATLAB (pulse sobre el botón MATLAB). Una vez que MATLAB se ha iniciado, escriba simulink (¡LETRAS PEQUEÑAS!) en el indicador de MATLAB (>>) seguido por un retorno de carro (presione la tecla RETURN). Debería aparecer a continuación una ventana de SIMULINK, con los siguientes iconos: Fuentes (Sources), Sumideros (Sinks), Discretos (Discrete), Lineales (Linear), Nolineales (Nonlinear), Conecciones (Connections), Extras (esta ventana se muestra en la Figura 2). Luego, vaya al menu file en esta ventana y escoja Nuevo (New) para empezar la construcción del diagrama de bloques como representación del sistema de interés. CONSTRUCCIÓN DEL DIAGRAMA DE BLOQUES Como se mencionó previamente, la representación del sistema por medio del diagrama de bloques está compuesto de varios tipos de iconos. Básicamente, se tiene que especificar el modelo del sistema (espacio de estado, discreto, funciones de transferencia, ODE's no lineales, etc), la entrada (fuente) al sistema, y donde irá la salida (sink) de la simulación del sistema. Abra las Fuentes (Sources), Sumideros (Sinks), y ventanas lineales mediante la pulsación sobre los iconos apropiados. Note los diferentes tipos de fuentes (función escalón, sinusoidal, ruido blanco, etc.), sumideros (osciloscopio (scope), archivo (file), espacio de trabajo (workspace)), y sistemas lineales (función de transferencia (transfer function), modelo del espacio de estado (state space model), etc.). Por ejemplo, puede que estemos interesados en simular la entrada escalón a una función de transferencia de primer orden en el dominio de Laplace y en ver el resultado gráficamente en MATLAB. El diagrama de bloques resultante se muestra en la Figura 3. Para hacer esto, “arrastre” un icono step function de la ventana Sources, un icono transfer function de la ventana Linear, dos iconos to workspace de la ventana Sinks, y un icono clock de la ventana Source a la ventana en blanco del diagrama de bloques.
- 4. El siguiente paso es conectar estos iconos entre sí por medio del dibujo de líneas uqe conecten los iconos usando el botón izquierdo del ratón (mantenga presionado el botón y arrastre el ratón para dibujar una línea). Conecte el icono step function a la entrada del icono transfer function, luego conecte la salida del icono transfer function al primer icono to workspace. Luego conecte el icono clock al segundo icono to workspace. “Abra” los iconos (con una doble pulsación sobre ellos con el botón izquierdo del ratón) y ponga los valores de los diferentes parámetros; por ejemplo el tamaño del paso y el tiempo del paso en el icono step function, los coeficientes de la función de transferencia en el icono transfer function, y los nombres de variables en los iconos to workspace (generalmente, la variable de reloj es identificada como time, mientras que la variable de salida es representada como y). Seleccione el campo de parámetros del menu de simulación (en la ventana del diagrama de bloques) y ponga los detalles para una integración apropiada (tamaños de paso mínimos y máximos, tiempos de integración de inicio y de parada, código de integración, etc.). Finalmente, seleccione start del menu de simulación para empezar la simulación. La salida de la simulación será enviada a la interfase de línea de comandos en MATLAB (CLI) (aquí el indicador de MATLAB, >>). El resultado puede ser dibujado como uno normalmente dibujaría ( es decir plot(time,y) ), ya que las variables time y y están ahora definidos en el espacio de trabajo de MATLAB. El resultado se muestra en la Figura 4, para una función de transferencia de primer orden con una constante de tiempo = 2, y una entrada escalón unitaria con time = 1.
- 5. CONSEJOS GENERALES PARA SIMULINK Los siguientes son consejos generales y deberían ser usados a menudo. 1. Para grabar su trabajo, seleccione Save del menu file y dele al archivo que usted quierer grabar un nombre (o escoja un nombre antiguo si usted está “escribiendo sobre” una versión vieja), y pulse el botón ok (usando el botón izquierdo del ratón). Dése cuenta que tiene una opción para la selección de la “carpeta” en la que el archivo está grabado. 2. Los parámetros del bloque PID Controller son ingresados como: , , . 3. La siguiente función de transferencia (en el dominio de Laplace)
- 6. es ingresada en el icono transfer function mediante una doble pulsación sobre el icono transfer function e ingresando los coeficientes de los polinomios tanto en el numerador como en el denominador. Los coeficientes del numerador serían ingresados como [2 1] y los coeficientes del denominador son ingresados como [10 5 1]. 4. La siguiente matriz A del espacio de estado es ingresada en el icono state space como [1.0 -2.8;-3.1 0.2]. 5. Los resultados de una simulación pueden ser enviados a la ventana de MATLAB mediante el uso del icono to workspace que se encuentra en la ventana Sinks. Abra el icono to workspace y seleccione el nombre de la variable en la que usted quiere que sean almacenados los resultados del espacio de trabajo de MATLAB. 6. Si su simulación tiene n variables de estado (o salidas) y usted quiere grabarlas con diferentes nombres, entonces tiene que usar una conexión especial llamada un icono Demux (como en demultiplexor) que se encuentra en la ventana de conexiones (Connections). Básicamente, toma una entrada vectorial y la convierte en varias líneas escalares. Puede establecer el número de salidas (líneas escalares) mediante una doble pulsación sobre el icono y así cambiar el número de salidas. Un icono Mux toma varias entradas escalares y las multiplexa en un vector (útil algunas veces para transferir los resultados de una simulación al espacio de trabajo de MATLAB, por ejemplo). 7. Se puede generar ruido blanco (aleatorio) mediante la selección del icono white noise de la ventana Source. 8. Se puede usar un icono Gain de la ventana Linear si usted necesita multiplicar una señal por un número constante. 9. Se puede convertir de regreso a las variables físicas después de una simulación de la función de transferencia o del espacio de estado mediante el uso del icono Constant de la ventana Sources y un icono Sum de la ventana Sources. Para hacer esto para una señal de salida escalar, solo ingrese el valor en estado permanente para el icono Constant y añada esto a la salida escalar usando usando el icono Sum. Para una salida vectorial, debe primero “descomponer” el vector en salidas escalares usando el icono Demux y luego añadir el valor en estado permanente a cada salida escalar.
- 7. 10.Los signos del icono Sum pueden ser cambiados a negativos (para restar) mediante una doble pulsación en el icono Sum y así cambiar el signo de uno positivo a uno negativo. El número de entradas al icono Sum puede ser cambiado mediante una doble pulsación en el icono Sum y de esta forma establecer el número de entradas en la ventana. 11.Asegúrese de poner los parámetros de integración en el menu de simulación. En particular, los tamaños de paso mínimos y máximos por defecto deben ser cambiados (deberían de estar en alrededor de 1/100 o 1/10 de la cosntante de tiempo dominante (la más lenta) de su sistema). 12.Los parámetros pueden ser “pasados” a SIMULINK desde la ventana de MATLAB mediante el uso del parámetro en un bloque de SIMULINK o en la caja de parámetros y definir el parámetro en la ventana de MATLAB. Por ejemplo, digamos que se quiere correr la ventana de simulación con muchas ganancias de procesos diferentes, entonces en el icono transfer function a la ganancia (en el numerador) se le puede dar el símbolo k (o cualquier otro símbolo) y luego en el indicador de MATLAB definir k = 1.0. Corra la simulación, luego en el indicador de MATLAB redefina k a k = 1.5, etc. Esto es muy útil si el estudiante quiere estudiar la influencia de un parámetro sobre el comportamiento dinámico de un proceso (importante en la determinación de la estabilidad). 13.Para imprimir el diagrama de bloques, primero grabemos el diagrama de bloques. Luego, en el indicador de MATLAB, escriba: print -sname-of-simulink-block donde name-of-simulink-block es el nombre con el que usted grabó el diagrama de bloques. Por ejemplo, si usted grabó el diagrama de bloques como homework1.m, entonces debería escribir: print -shomework1 14.Los tiempos de retraso (tiempos muertos) pueden ser simulados en SIMULINK fácilmente mediante el uso de un icono transport delay de la ventana Nonlinear. Pulse dos veces sobre el icono transport delay para poner el valor del tiempo muerto. 15.Los sistemas no lineales pueden ser simulados en SIMULINK usando un icono s-function de la ventana Extras. Las ecuaciones diferenciales ordinarias no lineales deben ser especificadas en un archivo con extensión .m (m-file), y el nombre de este archivo con extensión .m debe ser especificado en la s-function por el usuario. Generalmente le suministraremos al estudiante el archivo con extensión .m, el mismo que contiene las ecuaciones diferenciales ordinarias no lineales.
- 8. TABLA DE BLOQUES DE SIMULINK SOURCES Clock Proporciona y muestra el tiempo en el sistema. Constant Inyecta un valor constante. From File Lee datos de un archivo. From Workspace Lee datos de una matriz. Signal Generator Genera varias formas de onda. Sine Wave Genera una onda seno. Step Fcn Genera una función escalón. White Noise Genera ruido aleatorio. SINKS Scope Muestra las señales durante una simulación. To File Escribe datos a un archivo. To Workspace Escribe datos a una matriz. DISCRETE Discrete State- space Sistema discreto del espacio de estado. Discrete Transfer Fcn Función de transferencia discreta. Discrete Zero-Pole Sistema discreto como ceros, polos y ganancia. Filter Implementa filtros IIR y FIR. Unit Delay Señal de retardo para un periodo de muestreo.
- 9. LINEAR Derivative Pone en la salida la derivada en el tiempo de la entrada. Gain Multiplica la entrada por una constante. Integrator Integra una señal. State-Space Implementa un sistema lineal de espacio de estado. Sum Suma las entradas entre sí. Transfer Fcn Implementa una función de transferencia lineal. Zero-Pole Genera una función escalón. NONLINEAR Abs Pone en la salida el valor absoluto de la entrada. Backslash Modelo de histéresis. Dead Zone Proporciona una región de salida igual a cero. Fcn Función de propósito general en la entrada. Look Up Table Desarrolla un mapeo lineal por piezas. MATLAB Fcn Aplica una función de MATLAB en la entrada. Product Multiplica entre sí las entradas. Rate Limiter Limita la tasa de cambio de una señal. Relay Cambia la salida entre dos valores. Saturation Limita la excursión de la señal. S-Function Crea una S-function dentro de un bloque. Switch Cambia entre dos entradas. Transport Delay Retarda la entrada por un monto dado de tiempo.
- 10. CONNECTIONS Demux Separa una señal vectorial en señales escalares. Inport Proporciona un enlace a una entrada externa. Mux Agrupa varias líneas escalares en una línea vectorial. Outport Proporciona un enlace a una salida externa. EXTRAS Sources Fuentes adicionales. Display Devices Dispositivos de presentación adicionales. Filters Filtros adicionales. Controllers PID, anti windup y controladores óptimos. Linear Bloques lineales adicionales. Nonlinear Bloques no lineales adicionales. Discrete Bloques discretos adicionales. Logic Bloques lógicos (AND, OR, NAND, etc.). System ID Bloques para identificación de sistemas. Robust Control Demos Demostraciones de control robusto. MuTools Demos Análisis mu de sistemas de control. Block Library Los bloques más comúnmente usados. Demos Demostraciones de Simulink. Traducción al español: Rommel Eduardo Falconí Romero Dirección Facebook: https://www.facebook.com/cysacademica Dirección Blogger: http://www.cysacademica.blogspot.com/ Dirección Web Original: http://www.rpi.edu/dept/chem-eng/WWW/faculty/bequette/ lou/simtut/simtut_html.html