Procedimientos para la planificación en los Centros Educativos tipo V ( multi...
Transferencia de datos entre registros
1. Transferencia de datos entre registros
Edwin Andrés León Castro, Jorge Luís Rojas, Arley Suaterna, Daniel Fernando Valencia Z,
Facultad de Ingeniería, Universidad del Valle
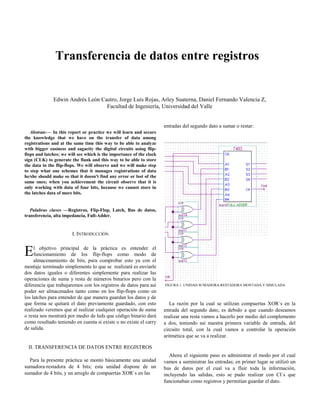
entradas del segundo dato a sumar o restar:
Abstratc— In this report or practice we will learn and secure
the knowledge that we have on the transfer of data among
registrations and at the same time this way to be able to analyze
with bigger easiness and sagacity the digital circuits using flip-
flops and latches; we will see which is the importance of the clock
sign (CLK) to generate the flank and this way to be able to store
the data in the flip-flops. We will observe and we will make step
to step what one schemes that it manages registrations of data
he/she should make so that it doesn't find any error or lost of the
same ones; when you achievement the circuit observe that it is
only working with data of four bits, because we cannot store in
the latches data of more bits.
Palabras claves —Registros, Flip-Flop, Latch, Bus de datos,
transferencia, alta impedancia, Full-Adder.
I. INTRODUCCIÓN
E l objetivo principal de la práctica es entender el
funcionamiento de los flip-flops como modo de
almacenamiento de bits, para comprobar esto ya con el
montaje terminado simplemente lo que se realizará es enviarle
dos datos iguales o diferentes simplemente para realizar las
operaciones de suma y resta de números binarios pero con la
diferencia que trabajaremos con los registros de datos para así FIGURA 1. UNIDAD SUMADORA-RESTADORA MONTADA Y SIMULADA.
poder ser almacenados tanto como en los flip-flops como en
los latches para entender de que manera guardan los datos y de
que forma se quitará el dato previamente guardado, con esto La razón por la cual se utilizan compuertas XOR´s en la
realizado veremos que al realizar cualquier operación de suma entrada del segundo dato, es debido a que cuando deseamos
o resta nos mostrará por medio de leds que código binario dará realizar una resta vamos a hacerlo por medio del complemento
como resultado teniendo en cuenta si existe o no existe el carry a dos, teniendo así nuestra primera variable de entrada, del
de salida. circuito total, con la cual vamos a controlar la operación
aritmética que se va a realizar.
II. TRANSFERENCIA DE DATOS ENTRE REGISTROS
Ahora el siguiente paso es administrar el modo por el cual
Para la presente práctica se montó básicamente una unidad vamos a suministrar las entradas; en primer lugar se utilizó un
sumadora-restadora de 4 bits; esta unidad dispone de un bus de datos por el cual va a fluir toda la información,
sumador de 4 bits, y un arreglo de compuertas XOR`s en las incluyendo las salidas, esto se pudo realizar con CI´s que
funcionaban como registros y permitían guardar el dato.
2. Los primeros registros que encontramos son dos CI´s,
74374, los cuales eran dos Flip-Flops, que estaban conectados
cada uno a las entradas (Las entradas corresponden a dos
números binarios de 4 bits). Este par de registros permitían
controlar cual dato pasa al bus, ya que sus salidas estaban
directamente conectadas a él. Esta acción podía realizarse
gracias a unas entradas de control (OE Output Enable), con
estas entradas podíamos poner las salidas en alta impedancia,
de esta manera no alimentaban al bus de datos.
FIGURA 3. IMPLEMENTACIÓN DE LOS LATCHES.
Estos registros guardan el dato justo antes de realizarse la
suma, así los dos datos que estén guardados en cada uno de los
registros van a ser sumado o restado, para guardar el dato
contamos con un Enable en cada registro, así para leer un dato
ubicamos el enable en “1”, en este momento el dato que está a
la entrada es reflejado en la salida, y posteriormente para
guardarlo ubicamos el enable en “0”; cuando el enable está en
“0” no va importar el dato que tengamos en el bus en ese
momento, en la salida vamos a tener el dato que leímos
cuando el enable se encontró en “1” por último vez. Teniendo
dos entradas de control adicional EN3 y EN4.
Por último, las salidas del full-adder son llevadas a un
quinto registro (74373) el cual tiene sus salidas conectadas al
bus de datos, teniendo de esta manera 2 entradas de control
más, un Enable (EN5) y un OE (OE5) en el registro que esta
conectado a las salidas del Full-Adder. Un último registro es
conectado en el bus de datos y su función básica es leer el dato
FIGURA 2. IMPLEMENTACIÓN DE LOS FLIP_FLOPS. que está presente en él y en su salida visualizarlo.
El circuito descrito anteriormente fue montado y simulado,
En este paso tenemos ya tres entradas más de control, OC1 en total disponemos de 10 señales de control, dos datos de
y OC2 con las cuales permitimos el paso de cada entrada y una entrada, dos salidas (una de ellas de 4 bits), 6 registros
señal de reloj CLK. Ahora tenemos la opción de introducir un conectados al bus (3 suministrando datos y 3 leyendo), 1 full-
dato o no en el bus, el siguiente paso es poder guardarlo, para adder y un CI 74ls86 (4 compuertas XOR).
ello disponemos de CI´s 74373, los cuales son registros que
funcionan por medio de Latches, Utilizamos dos registros para El circuito presenta una salida que corresponde al carry de
ello, ubicando las salidas a cada una de las entradas de la salida del full_adder, este bit indica que la suma que se este
unidad sumadora-restadora: realizando presenta un desborde, pero hay que tener en cuenta
la operación que estemos realizando, puesto que al realizar
restas el carry de salida puede encenderse e indicar que hay
desborde en la salida, hecho que es incompatible con la
operación que realizamos, debido a que el carry de salida de
3. un full-adder de 4 bits indica que este bit hace parte del 2A, para ello inicialmente ubicamos los EN3, EN4 y EN5 en
resultado y presenta un peso de 2 4 , este problema se presenta “0” para que ningún registro este leyendo un dato, y los OC1,
debido a que en realidad la operación que efectuamos al restar OC2, OC5 en “1” para que no suministremos ningún dato al
es una suma, con la particularidad de que el segundo dato lo bus, seguidamente observamos que el OC6 se ubica en “0” y el
hemos pasado a complemento a dos por medio del control SR, EN6 en “1” para observar el dato que esté presente en el bus.
en “ 1”, a travez de todas las compuertas XOR y el carry de Para realizar la operación 2A pasamos el dato A al bus
entrada. Por lo tanto este carry de salida puede ser ignorado ubicando OC1 “0”, para que el Registro 1 suministre el dato
cuando realicemos restas y debe ser tenido en cuenta cuando presente en su salida; si observamos en el diagrama al
realizamos una suma. momento de de habilitar este registro el dato en la salida es
“0” y no A (“5”), para lograr que el registro suministre A
El circuito anterior responde al siguiente circuito de flujo: debemos mover la entrada de control CLK, de tal manera que
tengamos un flanco de subida:
FIGURA 4.DIAGRAMA DE BLOQUES.
Muestre por medio de un diagrama de tiempo el flujo
de las señales de control para realizar la operación
2A±B. FIGURA 6. SEÑAL CLK.
El diagrama de flujo lo podemos se obtuvo a partir de la
siguiente simulación: En este momento tenemos presente A en el bus de datos.
Para obtener 2A, necesitamos que los registros 3 y 4, lean el
dato en el bus y lo guarden, debido a ello observamos que los
EN3 y EN4 son ubicados en “1” en una fracción de tiempo. En
las salidas del sumador tenemos tener 2A (revisando
previamente que la entrada S/R esté en “0”) y lo debemos
guardar para posteriormente sumar B. Para ello ubicamos OC1
en “1” para que el bus quede libre y ubicamos OC5 en “0”
para habilitar el Registro 5, para este lapso de tiempo el valor
observado en la salida puede variar de forma extraña debido a
que el EN5 aún no ha sido habilitado para que suministre el
dato al bus. El EN5 es ubicado en “1” temporalmente para que
pase el dato al bus y quede guardado en la salida de este
registro. Observamos que en la salida tenemos presente 2A
(“10”) y que el EN3 es ubicado en “1” para leer y guardar el
dato en el registro 3, el OC5 se ubica en “0” para tener el bus
libre nuevamente. La siguiente fracción del diagrama de flujo
muestra la secuencia presente para que al dato guardado se le
sume o reste B:
FIGURA 5. FRACCIÓN DEL DIAGRAMA DE FLUJO.
En el anterior diagrama tenemos como valores de entrada
A=5 y B=13, para realizar en esta primera parte la operación
4. complemento a dos y para conocer su magnitud debemos
pasarlo a complemento a dos, por lo tanto:
1310 11012
11012C 00112
00112 310
Por último cabe anotar que el Cout tuvo valores
indeterminados durante el tiempo en que los dos registros
antes del sumador no habían suministrado un dato exacto,
debido a que se debe tener con certeza que valores hay
presentes en las entradas del sumador para realizar la
operación.
Indique el error que se presenta en el siguiente
circuito de flujo de datos y la forma de corregirlo
FIGURA 7. SEGUNDA FRACCIÓN DEL DIAGRAMA DE FLUJO. para que se puedan desarrollar las operaciones de la
práctica:
De la figura 7 observamos que el primer paso es ubicar el
OC2 en “0” para el dato B este presente en el bus, observamos
que este dato había sido guardado en el registro cuando
suministramos el dato A al bus, seguidamente leemos y
guardamos el dato B en el registro 4, ubicando temporalmente
el EN4 en “1” temporalmente y observamos un cambio en la
salida Cout indicando que la suma ha producido un desborde,
en este momento podemos decidir si queremos sumar o restar.
Para observar finalmente el resultado ubicamos el OC5 en “0”
y el EN5 en “1”, en la salida observamos como resultado un
“7” y debido a que el Cout está en “1” debemos sumar 16, lo
que nos da como resultado “23”, que es lo que se esperaba.
Aprovechando que tenemos 2A y B guardados en las entradas
del sumador nos aseguramos de tener el EN5 en “1” y
modificar el S/R para observar la resta:
FIGURA 9. CIRCUITO DE FLUJO INCORRECTO.
El error se produce en la realimentación que se presenta en
el sumador hacia el REG 3, porque para que halla un flujo de
datos tienen que pasar obligatoriamente por el REG 4, y este
hecho no asegura que resultado se tome del sumador, para
luego ser guardado en el REG 3, por lo tanto no es posible
guardar con plena seguridad un dato en el REG 3, para
corregir dicho error lo ideal es conectar el REG 3 al bus de
datos, pero caeríamos en el circuito propuesto para la práctica.
Una alternativa presente es tomar la salida del REG 4 hacia el
FIGURA 8. SUMA – RESTA DE 2A Y B. REG 3, considerando como problema el hecho de que hay que
ser cauteloso en la secuencia en que vamos a ingresar un dato,
así de esta manera el primer dato que se desee guardar debe
Se observa que al momento de ubicar S/R en “1” el hacerse al REG 3 pasando previamente por el REG 4.
resultado cambia a “13”, hay que tener en cuenta que el
presente resultado ha sido suministrado en complemento a dos
debido a la lógica con la cual se ha realizado la resta. Por lo
tanto este resultado corresponde a un número negativo en
5. 9º Quitar dato B del bus.
10º Leer y ubicar el resultado 7+12 en el bus.
11º Restar 12 a 7.
III. INVESTIGACIÓN
Describa el funcionamiento de los FLIP-FLOPS.
Que tipos de F.F existen, cuales son sus principales
características, comercialmente como se conocen
(referencias para comprarlos de acuerdo al tipo de
F.F).
1. FLIP-FLOP.
FIGURA 10. CIRCUITO CORREGIDO. Un biestable, también llamado flip-flop , es un
multivibrador capaz de permanecer en un estado
Indicar cada uno de los pasos (cambio en posiciones determinado o por el contrario durante un tiempo
de los switch) necesarios para realizar la suma 7+12 y indefinido, es decir, que permanece indefinidamente en
la resta 7-12. uno de sus dos estados posibles aunque haya
desaparecido la señal de excitación que provoco su
Para los pasos de la operación vamos a dejar las señales
transición al estado actual; debido a su amplia
OC6 en “0” y EN6 en “1”. Este hecho solamente indica que
utilización, los F.F se han convertido en un elemento
vamos a observar el dato que está presente en el bus de datos
en todo momento: fundamental dentro de los circuitos secuenciales.
Esta característica es ampliamente utilizada en
A= 0111, B=1100 electrónica digital para memorizar información. El paso
de un estado a otro se realiza variando sus entradas,
PASO POSICIÓN Todos los circuitos digitales utilizan datos binarios para
CLK EN3 EN4 EN5 OC1 OC2 OC5 S/R funcionar correctamente, los circuitos están diseñados
1º 0 0 0 0 0 1 1 0 para contar, sumar, separar, etc. los datos según nuestras
2º 1 0 0 0 0 1 1 0 necesidades, pero por el tipo de funcionamiento de las
3º 1 1 0 0 0 1 1 0
compuertas digitales, los datos presentes en las salidas de
4º 1 0 0 0 0 1 1 0
las mismas, cambian de acuerdo con sus entradas, y no
5º 1 0 0 0 1 1 1 0
hay manera de evitarlo, si las entradas cambian, las
6º 1 0 0 0 1 0 1 0
salidas lo harán también; Dependiendo del tipo de dichas
7º 1 0 1 0 1 0 1 0
entradas los biestables se dividen en:
8º 1 0 0 0 1 0 1 0
1 0 0 0 1 1 1 0 Asíncronos: Sólo tienen entradas de control. El
9º
10º 1 0 0 1 1 1 0 0 más empleado es el biestable RS.
RESULTADO 7+12 Síncronos: Además de las entradas de control
11º 1 0 0 1 1 1 0 1 posee una entrada de sincronismo o de reloj. Si
RESULTADO 7-12 las entradas de control dependen de la de
TABLA 1. POSICIONES EN LOS SWITCH.
sincronismo se denominan síncronas y en caso
contrario asíncronas. Por lo general, las entradas
Donde cada paso corresponde a las siguientes acciones:
de control asíncronas prevalecen sobre las
1º Ubicar dato A en el bus. síncronas.
2º Guardar datos A y B en los registros 1 y 2 La entrada de sincronismo puede ser activada por nivel
respectivamente. (alto o bajo) o por flanco (de subida o de bajada). Dentro
3º Leer dato A en el REG 3. de los biestables síncronos activados por nivel están los
4º Guardar dato A en el REG 3. tipos RS y D, y dentro de los activos por flancos los tipos
5º Quitar dato A del bus. JK, T y D.
6º Ubicar dato B en el bus. 1.2 TIPOS DE FLIP-FLOPS:
7º Leer dato B en el REG 4 1.2.1 FLIP-FLOP S-R
8º Guardar dato B en el REG 4.
6. Dispositivo de almacenamiento temporal de dos estados ejemplo de un biestable síncrono a partir de una asíncrona,
(alto y bajo), cuyas entradas principales, R y S, a las que junto con su esquema normalizado:
debe el nombre, permiten al ser activadas: Su tabla de verdad es la siguiente:
R: El borrado (reset en inglés), puesta a 0 ó nivel bajo
de la salida. C R S Q Q
S: El grabado (set en inglés), puesta a 1 ó nivel alto
de la salida. 0 X X Q0 Q0
Si no se activa ninguna de las entradas, el biestable
permanece en el estado que poseía tras la última 1 0 0 Q0 Q0
operación de borrado o grabado. En ningún caso deberían
activarse ambas entradas a la vez, ya que esto provoca que
1 0 1 1 0
las salidas directa (Q) y negada (Q') queden con el mismo
valor: a bajo, si la báscula está construida con puertas 1 1 0 0 1
NO-O (NOR), o a alto, si con puertas NO-Y (NAND). El
problema de que ambas salidas queden al mismo estado 1 1 1 INDEFINIDO
está en que al desactivar ambas entradas no se podrá
TABLA 2. TABLA DE VERDAD S-R SINCRONO
determinar el estado en el que quedaría la salida. Por eso,
1.2.2 FLIP-FLOP D.
en las tablas de verdad, la activación de ambas entradas se
Dispositivo de almacenamiento temporal de dos estados
contempla como caso no deseado (INDETERMINADO).
(alto y bajo), cuya salida adquiere el valor de la entrada D
cuando se activa la entrada de sincronismo, C. En función
del modo de activación de dicha entrada de sincronismo,
existen dos tipos de biestables D:
Activo por nivel (alto o bajo), también denominado
registro o cerrojo (latch en inglés).
Activo por flanco (de subida o de bajada).
FIGURA 11. SÍMBOLO DEL FLIP-FLOP S-R
1.2.1.1 FLIP-FLOP S-R ASINCRONO
Sólo posee las entradas R y S. Se compone internamente de
dos puertas lógicas NO-Y o NO-O, Su tabla de verdad es
la siguiente (Q representa el estado actual de la salida y q
el estado anterior a la última activación):
R S Q FIGURA 12. SÍMBOLO DEL FLIP-FLOP D
Q
A diferencia de los FF tipo J-K, el FF tipo "D" (Datos,
0 0 Q0 Q0 Data) sólo cuneta con una entrada para hacer el cambio de las
salidas. A cada pulso del reloj; El circuito opera de la siguiente
0 1 1 0 forma: cuando hay un flanco de subida en el puerto de entrada
clk, y la entrada d vale '1', entonces la salida q pasa a tomar el
1 0 0 1
valor de d. Cuando clk está a nivel bajo, la entrada d se
1 1 INDEFINI encuentra deshabilitada, manteniendo q el valor anterior. Esta
DO es la base de su operatividad como memoria
TABLA 2. TABLA DE VERDAD S-R ASINCRONO La ecuación característica del biestable D que describe su
comportamiento es:
1.2.1.2 FLIP-FLOP S-R SÍNCRONO.
Además de las entradas R y S, posee una entrada C de D CLK Q Q ´
sincronismo cuya misión es la de permitir o no el cambio
de estado del biestable. En la siguiente figura se muestra un
7. 0 ↑ 0 1
1 ↑ 1 0
X 0 Q0 Q0
X 1 Q0 Q0
TABLA 2. TABLA DE VERDAD FLIP-FLOP D
FIGURA 12. SÍMBOLO DEL FLIP-FLOP J-K
1.2.3 FLIP-FLOP J-K.
1.3 TRANSFERENCIA DE DATOS ENTRE FLIP-FLOPS
El flip-flop JK se emplea para eliminar la incertidumbre
cuando las señales de entrada J=K=1, en el caso del flip- El uso mas común que se le dan a los flip-flops es el
flop RS, esta asignación de los valores de las entradas de almacenamiento de datos o información. Estos datos
estaban prohibidas en el caso del RS, sin embargo aquí en generalmente se almacenan en grupos de flip-flops que
el JK, se dará la función basculamiento. El flip-flop JK es son llamados registros. La operación de más frecuencia
el más completo de, los flip-flop que se emplean. Tiene dos en los datos almacenados en los flip-flops o registros es
entradas J y K, similares a las entradas S y R de un flip- la transferencia. Como por ejemplo la transferencia de
datos entre los flip-flops S-C, J-K y D es la siguiente:
flop RS. La estrada J realiza la función set y la entrada K la
función reset. La principal diferencia entre ambos es que J
y K pueden valer uno simultáneamente, a diferencia del
flip-flop RS, en este caso la salida cambia de estado,
pasando a valer lo contrario de lo que valía antes.
CLK J K Q Q´
0 X X Q0 Q0
1 X X Q0 Q0 FIGURA 13 FLIP-FLOP S-C
↑ 0 0 Q0 Q0
↑ 0 1 0 1
↑ 1 0 1 0
↑ 1 1 Q0 Q0
TABLA 2. TABLA DE VERDAD FLIP-FLOP J-K
FIGURA 14 FLIP-FLOP J-K
1.3 FLIP-FLOPS COMERCIALES
74LS73: Dual JK con disparo de flanco negativo.
74LS74: Dual JK con disparo de flanco positivo
74LS173: 4 registros tipo D con salida tipo 3-estados
74LS174: 6 flip-flops tipo D (Fairchild).
74LS273: 8 registros tipo D con borrado
74LS373: 8 registros D tipo Latch, con salidas de 3
estados
74LS374: 8 registros D tipo Latch, con salidas de 3
estados FIGURA 15 FLIP-FLOP D
8. Estas transferencias que se dan a través del Bus de Datos
2. LATCH. son gobernadas por varios dispositivos y métodos, de los
cuales el Controlador PCI, "Peripheral Component
Interconnect", Interconexión de componentes Periféricos,
es uno de los principales. Su trabajo equivale,
Un latch es un dispositivo asíncrono que permite simplificando mucho el asunto, a una central de semáforos
almacenar un bit. De acuerdo a l estado de las entradas, él para el tráfico en las calles de una ciudad.
puede ejecutar varias acciones, cargar un bit, almacenarlo
o simplemente borrarlo. De esta manera tenemos una 3.1.2 BUS DE DIRECCIONES
especie de memoria RAM. El término asíncrono indica
que no es necesario que el latch este sincronizado con una El bus de dirección (o direcciones) es un bus del
señal de reloj externa, este funciona cada vez que cambia microprocesador totalmente independiente al bus de datos
la entrada. Existen varios tipos de latch, entre los más donde se establece la dirección de memoria del dato en
conocidos están el SR y el D. tránsito.
3. BUS DE DATOS. El bus de dirección consiste en el conjunto de líneas
eléctricas necesarias para establecer una dirección. Esto
En la arquitectura de computadores, un bus puede depende de la cantidad de memoria direccionable. Por
conectar lógicamente varios periféricos (o computadores) ejemplo, para direccionar una memoria de 256 palabras,
sobre el mismo conjunto de cables. Bus es una palabra son necesarias al menos 8 líneas. Adicionalmente pueden
inglesa que significa "transporte". Aplicada a la ser necesarias líneas de control para señalar cuando la
informática, se relaciona con la idea de las transferencias dirección está disponible en el bus. Esto depende del
internas de datos que se dan en un sistema computacional diseño del propio bus.
en funcionamiento. En el bus todos los nodos reciben los
datos aunque no se dirijan a todos éstos, los nodos a los Algunos diseños utilizan líneas eléctricas multiplexadas
que no van dirigidos los datos simplemente los ignoran. para el bus de dirección y el bus de datos. Esto significa
Los primeros buses de computadoras eran literalmente que un mismo conjunto de líneas eléctricas se comportan
buses eléctricos paralelos con múltiples conexiones. Hoy unas veces como bus de dirección y otras veces como bus
en día el término es usado para cualquier arreglo físico de datos, pero nunca al mismo tiempo. Una línea de control
que provea la misma funcionalidad lógica que un bus permite discernir cual de las dos funciones está activa.
eléctrico paralelo. Los buses modernos pueden usar tanto
conexiones paralelas como en serie, y pueden ser 3.1.3 BUS DE CONTROL
cableados en topología multidrop o en daisy chain, o
conectados por hubs switcheados, como el caso del USB. Gobierna el uso y acceso a las líneas de datos y de
direcciones. Como estas líneas están compartidas por todos
los componentes tiene que proveerse de determinados
3.1 CLASES DE BUSES. mecanismos que controlen su utilización. Las señales de
Hay tres clases de buses: bus de datos, bus de control transmiten tanto ordenes como información de
direcciones y bus de control. temporización entre los módulos del sistema.
3.1.1 BUS DE DATOS IV. CONCLUSIONES
Ppermite significar la idea de las transferencias
internas de datos que se dan en un sistema computacional Dentro de la presente práctica cabe anotar que se logró
en funcionamiento. En el bus todos los nodos reciben los comprender y afianzar aún más conceptos correspondientes a
datos aunque no se dirijan a todos los nodos, los nodos a la lógica combinatoria, como es el caso de una unidad
los que no van dirigidos simplemente lo ignoran. sumadora-restadora, de donde se pudo comprender y verificar
el modo y funcionamiento de esta. De la cual podemos afirmar
El primero mueve los datos entre los dispositivos del
que:
hardware: de Entrada como el teclado, el escáner, el
Mouse, etc.; de salida como la Impresora, el Monitor o la - El carry de salida tiene un peso de 2 n para un
tarjeta de Sonido; y de Almacenamiento como el Disco sumador de n bits
Duro, el Diskette o la Memoria-Flash.
9. - Al usar la unidad para restas podemos encontrar que - Cuando trabajamos en modo nivel tenemos la opción de
en una resta simple se puede presentar un desborde leer el dato mientras mantenemos el nivel y guardarlo
debido a que usamos complemento a dos. cuando se cambie.
- Cuando realizamos restas de tal manera que el
resultado es negativo, vamos encontrar este en El uso de compuertas triestados, FF D, modo nivel y modo
complemento a dos y para conocer su magnitud flanco, permitió el uso de mandos o señales de control que
debemos complementarlo a dos. podían ser manipuladas para hacer uso del circuito y permitir
- El hecho de que el carry de salida se encienda cuando realizar las operaciones por medio de registros (utilizando los
realizamos algunas restas y que dichas restas se enable o señales de reloj) para guardar memoria, realizar la
presenten en complemento a dos siendo el resultado operación requerida (S/R de la unidad), manejar el paso de
negativo, hace necesario que cuando al operar la datos (utilizando las compuertas triestados a travez de los
unidad, tener presente estas consideraciones para “Output Control”) y evitar perdida de información en un bus
interpretar el resultado, hecho por el cual puede no de datos.
ser viable.
Por último, al tener todo en conjunto permitió ver y
Por otro lado encontramos que se pudo establecer un flujo de establecer las diferencias y funciones de los elementos ya
datos a través de un bus por medio de registros, para ello se mencionados para manipular y transferir datos y todo esto
tuvieron en cuenta FLIP-FLOPS D (modo flanco y modo gracias a un bus de datos del cual también se pudo comprender
nivel). Del FLIP-FLOP D podemos afirmamos lo siguiente: y establecer utilidades para el flujo de información.
- Cuando se habla de modo nivel quiere decir que la
salida del FF D es totalmente transparente al dato V. OBSERVACIONES Y COMENTARIOS
cuando la señal de reloj, o enable para este caso, se
encuentra sobre un nivel lógico (“1”), Observaciones : El laboratorio en el momento de su
- Cuando se habla de modo flanco encontramos que el desarrollo resultó ser muy practico ya que se debía de realizar
FF D solo lee el dato de entrada y lo ubica en la una acción cualquiera (Operación del circuito) el cual
salida solo cuando se presenta un flanco de subida o demostraba la preparación y el entendimiento del
solo flanco de bajada. comportamiento del circuito que se montó previamente.
- Un flaco de subida en una señal se presenta cuando
la señal pasa del nivel bajo al alto. El flanco de Comentarios : De pronto, por el peso académico que
bajada corresponde al caso inverso. representa el sexto semestre, el tiempo que se necesita
disponer para los montajes es bastante y por ende complica la
Para la correcta utilización del bus se hizo necesario utilizar elaboración de los circuitos.
las compuertas triestados debido a que este tipo de compuertas
permite controlar el paso de un dato a travez de ella. Estas IV. BIBLIOGRAFÍA
compuertas estan ubicadas dentro de los CI´s utilizados y
controlaban el paso de cada dato al bus. Por ello podemos ver
la utilidad de las mencionadas compuertas en la transferencia
[1] John P. Hayes. "Introducción al Diseño Lógico Digital".
de datos ya que permite utilizar una vía directa para que dos o
Addison-Wesley Iberoamericana;
más integrados puedan enviar información a travez de ella,
[2] www.datasheetcatalog.com
uno a la vez, sin la necesidad de implementar vías [3] Jhon Wakerly. “Diseño Digital, Principios y practicas”.
independientes. Prentice – Hall 3ra Edición.
[4] http://proton.ucting.udg.mx/~zoad/programas/electfile
El hecho de que los FF funcionen con una señal de reloj [5] http://oswagar.galeon.com/enlaces1111733.html
(modo nivel o flanco), permitió aprovechar este hecho para
usarlos como elementos para guardar memoria y ser usados
como registros, de lo anterior podemos diferenciar que:
- Cuando trabajamos en modo flanco tomamos el dato que
está a la entrada una vez se ha dado la orden (puede ser
mediante un pulso, o un cambio en la posición de un dip-
switch) y el dato queda guardado instantáneamente