
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Sensor ultrasónico vs infrarrojo: Características y aplicaciones
Similar to Sensor ultrasónico vs infrarrojo: Características y aplicaciones (20)
More from TecnologiaCaminimori
More from TecnologiaCaminimori (20)
Recently uploaded
Recently uploaded (20)
Sensor ultrasónico vs infrarrojo: Características y aplicaciones
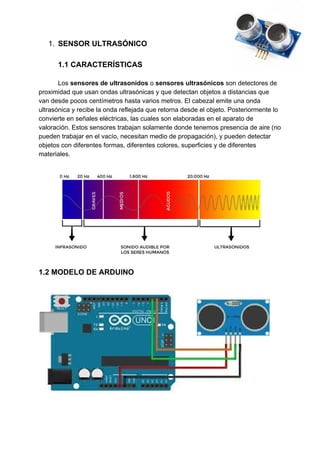
- 1. 1. SENSOR ULTRASÓNICO 1.1 CARACTERÍSTICAS Los sensores de ultrasonidos o sensores ultrasónicos son detectores de proximidad que usan ondas ultrasónicas y que detectan objetos a distancias que van desde pocos centímetros hasta varios metros. El cabezal emite una onda ultrasónica y recibe la onda reflejada que retorna desde el objeto. Posteriormente lo convierte en señales eléctricas, las cuales son elaboradas en el aparato de valoración. Estos sensores trabajan solamente donde tenemos presencia de aire (no pueden trabajar en el vacío, necesitan medio de propagación), y pueden detectar objetos con diferentes formas, diferentes colores, superficies y de diferentes materiales. 1.2 MODELO DE ARDUINO
- 2. 1.3 VENTAJAS Las ventajas son: ● Detectan a un objeto pese a su color o material. ● La máxima distancia a detectar es de 4 metros que es la idónea para el uso que queremos darle. ● Es inmune al polvo y al agua. ● Tienen una función de aprendizaje para definir el campo de detección. 1.4 DESVENTAJAS Sus desventajas son: ● Su precisión es baja. ● La velocidad de respuesta es lenta. ● Tiene zonas ciegas y falsas alarmas. La zona ciega es la zona que está entre el lado sensible del detector y el alcance mínimo en el que ningún objeto puede detectarse de forma fiable. 2. SENSOR INFRARROJO 2. 1 CARACTERÍSTICAS El sensor infrarrojo es un dispositivo capaz de medir la radiación electromagnética infrarroja de los cuerpos en su campo de visión. Todos los cuerpos emiten una cierta cantidad de radiación, aunque esta resulta invisible para nuestros ojos, no lo es para estos aparatos electrónicos, ya que se encuentran en el rango del espectro justo por debajo de la luz visible. Son ampliamente utilizados para la detección de obstáculos en pequeños vehículos o robots.
- 3. 2.2 MODELO DE ARDUINO 2.3 VENTAJAS Sus ventajas son: ● Son muy económicos. ● Es bueno para la detección de obstáculos en varias direcciones. 2.4 DESVENTAJAS ● Este tipo de sensores actúan a distancias cortas, típicamente de 5 a 20mm. Además la cantidad de luz infrarroja recibida depende del color, material, forma y posición del obstáculo, por lo que no disponen de una precisión suficiente para proporcionar una estimación de la distancia al obstáculo. 3. COMPARACIÓN Sensor ultrasónico Sensor infrarrojo Alcance de hasta 4 metros Alcance bajo, 20 mm Precio ligeramente superior Muy económico
- 4. 4. CONCLUSIÓN Hemos optado por la opción del sensor ultrasónico ya que nos ofrece mejores cualidades para el uso que le queremos dar. Al tratarse de una puerta es necesario que tenga un alcance mayor y se adapta mejor a la estética de nuestro proyecto. 5. SERVOMOTOR La elección de motor eléctrico es básica en cualquier proyecto electromecánico. Cuando se requiere una precisión máxima, es cada vez más habitual pensar en el protagonista de este artículo: el servomotor. Conoce su funcionamiento y por qué es básico en robótica y otros sectores industriales de gran precisión. ¿Qué es un servomotor? Un servo es un tipo de accionador ampliamente empleado en electrónica. A diferencia de otros tipos de motores en los que controlamos la velocidad de giro, en un servo indicamos directamente el ángulo deseado y el servo se encarga de posicionarse en este ángulo.Típicamente los servos disponen de un rango de movimiento de entre 0 a 180º. Es decir, no son capaces de dar la vuelta por completo (de hecho disponen de topes internos que limitan el rango de movimiento).Internamente un servo frecuentemente consta de un mecanismo reductor. Por tanto proporcionan un alto par y un alto grado de precisión (incluso décimas de grado). Por contra, las velocidades de giro son pequeñas frente a los motores de corriente continua.
- 5. Los servos se admiten una tensión de alimentación entre 4,8V a 7,2V, siendo el valor más adecuado es 6V. Con tensiones inferiores el motor tiene menos fuerza y velocidad. Con tensiones superiores a 6,5V los servos empiezan a oscilar demasiado, lo cual los hace poco útiles. ¿Cómo funciona un servomotor? Internamente un servo está constituido por un motor de corriente continua, acoplado a un reductor para reducir la velocidad de giro, junto con la electrónica necesaria para controlar su posición. Frecuentemente se dispone de un potenciómetro unido al eje del servo, que permite al servo para conocer la posición del eje. Esta información es tratada por un controlador integrado que se encarga de ajustar actuar sobre el motor para alcanzar la posición deseada. La comunicación de la posición deseada se realiza mediante la transmisión de un señal pulsada con periodo de 20 ms. El ancho del pulso determina la posición del servo.
- 6. La relación entre el ancho del pulso y el ángulo depende del modelo del motor. Por ejemplo, algunos modelos responden con 0º a un pulso de 500 ms, y otros a un pulso de 1000 ms En general, en todos los modelos: ● Un pulso entre 500-1000 us corresponde con 0º ● Un pulso de 1500 ms corresponde con 90º (punto neutro) ● Un pulso entre 2000-2500 us corresponde con 180º Por tanto, variando la señal en microsegundos podemos disponer de una precisión teórica de 0.18-0.36º, siempre que la mecánica del servo acompañe. ESQUEMA DE MONTAJE Para conectar un servo a una placa de Arduino. El servo dispone de tres cables, dos de alimentación (GND y Vcc) y uno de señal (Sig). El color de estos cables suele tener dos combinaciones: -Marrón(GND),Rojo(Vcc) y Naranja(Sig) -Negro(GND), Rojo (Vcc) y Blanco (Sig) Por un lado, alimentamos el servo mediante el terminal GND ( Marrón / Negro) y Vcc (Rojo).
- 7. En general, la alimentación a los servos se realizará desde una fuente de tensión externa (una batería o fuente de alimentación) a una tensión de 5V-6.5V, siendo 6V la tensión idónea. Arduino puede llegar a proporcionar corriente suficiente para encender un servo pequeño (SG90), suficiente para hacer unos cuantos proyectos de prueba. Sin embargo no dispone de corriente suficiente para actuar un servo grande (MG996R). Incluso varios servos pequeños, o hacer excesiva fuerza con ellos puede exceder la capacidad de corriente de Arduino, provocando su reinicio. Por otro lado, finalmente, para el control conectamos el cable de señal (naranja / blanco) a cualquier pin digital de Arduino. Partes de un servomotor Un servomotor lo compone: -Un motor eléctrico: Que es el encargado de generar el movimiento a través de su eje. -Un sistema de control: Este sistema permite controlar el movimiento del motor mediante el envío de pulsos eléctricos. -Un sistema de regulación: Está formado por engranajes por los cuales puede aumentar la velocidad y el par o disminuirlas. -Un potenciómetro: Se encuentra conectado al eje central y permite en todo momento saber el ángulo en el que se encuentra el eje del motor.