2. EL SISTEMA DE
CONTROL
•
•
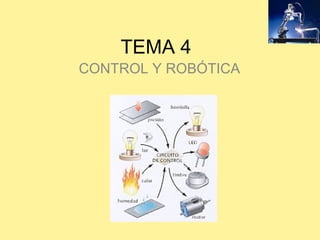
Un sistema de control es un conjunto de elementos interconectados que
permiten el funcionamiento automático de una máquina, instalación o
proceso.
Los sistemas de control se componen de tres elementos fundamentales:
– Sensores: captan la información (velocidad, temperatura, humedad del
ambiente etc.)
– Controladores: recogen la información de los sensores y la gestionan
(circuitos eléctricos, autómatas programables, ordenadores etc.)
– Actuadores: reciben la orden del controlador y actúan (bombillas,
motores, cilindros neumáticos o hidráulicos etc.)
3. TIPOS DE SISTEMAS
DE CONTROL
•
SISTEMAS DE CONTROL EN LAZO ABIERTO
No necesitan sensor, sólo tienen un controlador y un actuador
ENTRADA
Ejemplos pueden ser: reloj, semáforo etc.
SALIDA
4. TIPOS DE SISTEMAS
DE CONTROL
•
SISTEMAS DE CONTROL EN LAZO CERRADO
Se produce una realimentación, es decir, un sensor está midiendo la
variable a la salida y la compara con la de la entrada para poder reajustarse
el sistema.
Este tipo de sistemas se dan en instalaciones como llenados
automáticos de tanque, controles de temperatura etc.
6. IN D U S T R IA M O D E R N A
M E C A N IZ A C IO N
A U T O M A T IZ A C IO N
IN F O R M A T IZ A C IO N
La Sociedad Postindustrial es la Sociedad Digital y globalizada. La
Sociedad Digital se sustenta en las tecnologías digitales, las cuales
hacen converger a la COMPUTACION y a la COMUNICACION.
7. SOCIEDAD DIGITAL
La Sociedad Digital se refiere no sólamente a los medios
productivos, sino que influye en todos los ámbitos sociales.
La automatización tiene aplicaciones variadas.
13. SENSORES DE
TEMPERATURA BASADOS
EN LA DILATACIÓN
• Los cuerpos experimentan un aumento de tamaño al
aumentar la temperatura.
• Las láminas bimetálicas consisten en dos láminas unidas
de distintos metales que al dilatarse de distinta forma se
doblan, abriendo un contacto, es el sensor que utilizan los
termostatos.
14. SENSORES DE
TEMPERATURA BASADOS
EN LA VARIACIÓN DE
RESISTENCIA
• Las termorresistencias, las PTCs y las NTCs son
resistencias que dependen de la temperatura exterior.
15. SENSORES DE
TEMPERATURA
SENSIBLES A LA
RADIACCIÓN INFRARROJA
• Todos los cuerpos emiten una radiación infrarroja
proporcional a la temperatura, a través de estos
sensores podemos medir la temperatura sin contacto
directo.
16. SENSORES DE POSICIÓN
BASADOS EN
INTERRUPTORES
MECÁNICOS
• Los más comunes son los finales de carrera que,
mediante el choque del objeto contra el sensor se
consigue la apertura o cierre del interruptor.
17. SENSORES DE POSICIÓN.
INTERRUPTORES DE
PROXIMIDAD MAGNÉTICOS
• Formados por dos láminas imantadas que modifican su
posición cuando aproximamos un imán.
18. SENSORES DE
POSICIÓN ÓPTICOS
• Se basan en emitir un rayo de luz y comprobar que la
alcanza el receptor, se suele utilizar un diodo LED de
radiacción infrarroja para evitar interferencias con la luz
visible
19. SENSORES DE FUERZA
Y PRESIÓN. GALGAS
EXTENSIOMÉTRICAS
• Son sensores de presión basados en una lámina
metálica depositada sobre un material flexible. Al
deformarse experimentan una variación de resistencia
proporcional a la deformación producida por el peso del
objeto.
20. SENSORES DE FUERZA
Y PRESIÓN. SENSORES
TIPO BOURDON
• Son los utilizados en manómetros, en su interior tienen
un tubo flexible que modifica su posición en función de
la presión de entrada.
27. CONTROL ELECTRÓNICO
MEDIANTE
TRANSISTORES
• Los transistores consiguen regular la corriente que circula
entre el colector y el emisor dependiendo de la corriente
que entre por la base. En los controladores actúan
amplificando la señal eléctrica, que la corriente que circula
por el sensor es mucho más pequeña que la que utiliza el
actuador.
La corriente que
circula por el sensor
de temperatura es
mucho más pequeña
que la que utiliza el
motor.
28. CONTROL MEDIANTE
AUTÓMATAS
PROGRAMABLES
•
•
•
Un autómata programable es un aparato
que contiene un microcontrolador de
forma que se puedan realizar y
almacenar programas para el
funcionamiento deseado.
Un microcontrolador es un pequeño
ordenador miniaturizado e incluído en un
circuito integrado.
.
Eléctricamente se le conectan una serie
de entradas para los sensores, elementos
de mando etc. y una vez el autómata
gestiona el programa a realizar, se
conectan salidas para los actuadores.
29. CONTROL MEDIANTE
ORDENADOR
• Actualmente muchos sistemas automáticos se controlan
mediante ordenadores. Para controlar procesos mediante
ordenador necesitamos una tarjeta controladora y un
programa que la controle.
• La tarjeta controladora permite la conexión eléctrica a los
sensores y a los actuadores.
.
30. CONTROL MEDIANTE
ORDENADOR
• Para la realización de los programas utilizamos lenguajes
de programación, los más usados son Basic, Visual Basic,
C y Logo.
.
31. CONTROL MEDIANTE
ORDENADOR
• Las entradas y salidas de la controladora pueden ser tanto
digitales como analógicas, como un ordenador sólo trabaja
con señales digitales, necesitamos unos elementos,
llamados conversores analógicos digitales (ADC), que nos
traducen los valores analógicos al código binario.
.
32. CONTROL MEDIANTE
ROBOTS
•
•
•
Un robot es una máquina automática capaz de
captar la información de su entorno y reaccionar
ante ella. Además puede programarse para
realizar distintas tareas. Se trata de un sistema de
control completo, ya que integra sensores, un
elemento de control y actuadores.
Los robots se utilizan en la realización de tareas
que requieren mucho esfuerzo o de labores
repetitivas, así como para trabajos que supongan
un riesgo para la salud de las personas. .
El programa de control de un robot se integra en
un microcontrolador, que es un pequeño
ordenador miniaturizado e incluido en un circuito
integrado.
33. ANTECEDENTES
•
El 24 de abril de 1997 en la
Conferencia Internacional de
Robótica y Automatización en
Alburquerque, USA, KEVIN
BRADY, aspirante a doctor de
Washington Univ con un
Joystick controló los
movimientos de un Robot PUMA
a más de 1,500 Km. De
distancia, durante 3 minutos.
36. 1. ¿Qué es la róbotica?
La robótica es la ciencia y la tecnología de los robots. Se
ocupa del diseño, manufactura y aplicaciones de los robots. La
robótica combina diversas disciplinas como son: la mecánica, la
electrónica, la informática, la inteligencia artificial y la ingeniería
de control. Otras áreas importantes en robótica son el álgebra,
los autómatas programables y las máquinas de estado.
37. Ventajas e Inconvenientes
Ventajas:
• Hacer tareas irrealizables sin intervención de
una maquina.
• Son capaces de realizar tareas peligrosas
para el ser humano.
• Reducción de costes productivos. Trabajan las
24 horas y no se ponen enfermos.
• Mayor precisión.
Inconvenientes:
• Sustitución de trabajadores por máquinas.
Reducción de puestos de trabajo.
• Mayor dependencia tecnológica. Mayor
necesidad de mano de obra cualificada
38. 2. Clasificación de los robots.
2.1. Según su generación.
1ª GENERACIÓN:
Manipuladores. Son sistemas
mecánicos multifuncionales
con un sencillo sistema de
control, bien manual, de
secuencia fija o de secuencia
variable.
39. 2. Clasificación de los robots.
2ª GENERACIÓN: Robots de aprendizaje. Repiten una
secuencia de movimientos que ha sido ejecutada previamente
por un operador humano. El modo de hacerlo es a través de un
dispositivo mecánico. El operador realiza los movimientos
requeridos mientras el robot le sigue y los memoriza.
40. 2. Clasificación de los robots.
3ª GENERACIÓN: Robots con control sensorizado. El
controlador es una computadora que ejecuta las órdenes de un
programa y las envía al manipulador para que realice los
movimientos necesarios.
41. 2. Clasificación de los robots.
4ª GENERACIÓN: Robots
inteligentes. Son similares
a los anteriores, pero además
poseen sensores que envían
información a la computadora
de control sobre el estado del
proceso. Esto permite una
toma inteligente de decisiones
y el control del proceso en
tiempo real.
42. 2.2. Según su arquitectura.
Pueden ser de cinco tipos distintos:
1. Poliarticulados: En este grupo están los Robots de muy
diversa forma y configuración cuya característica común es la
de ser básicamente sedentarios y estar estructurados para
mover sus elementos terminales en un determinado espacio de
trabajo según uno o más sistemas de coordenadas y con un
número limitado de grados de libertad". En este grupo se
encuentran los manipuladores, los Robots industriales y los
Robots cartesianos.
43. 2.2. Según su arquitectura.
2. Móviles: Son Robots con grandes capacidad de
desplazamiento, basados en carros o plataformas y dotados de
un sistema locomotor de tipo rodante. Siguen su camino por
telemando o guiándose por la información recibida de su
entorno a través de sus sensores.
44. 2.2. Según su arquitectura.
3. Androides: Son Robots que
intentan reproducir total o
parcialmente la forma y el
comportamiento cinemática del
ser humano. Actualmente los
androides son todavía dispositivos
muy poco evolucionados y
sin utilidad práctica, y destinados,
fundamentalmente, al estudio y
experimentación.
45. 2.2. Según su arquitectura.
4. Zoomórficos: Los Robots zoomórficos, constituyen una
clase caracterizada principalmente por sus sistemas de
locomoción que imitan a los diversos seres vivos. A pesar de la
disparidad morfológica de sus posibles sistemas de locomoción
es conveniente agrupar a los Robots zoomórficos en dos
categorías principales: caminadores y no caminadores.
46. 2.2. Según su arquitectura.
5. Híbridos: Estos Robots corresponden a aquellos de difícil
clasificación cuya estructura se sitúa en combinación con
alguna de las anteriores ya expuestas, bien sea por conjunción
o por yuxtaposición.