1. HEADER
ELSA
Europa Lander for Science Acquisition
Team Members: Darren Combs, Gabe Frank, Sara Grandone, Colton Hall, Daniel Johnson, Trevor Luke, Scott Mende, Daniel Nowicki, Ben Stringer
Customer: Joe Hackel (Ball Aerospace), Advisor: Dr. Robert Marshall
Objectives:
The ELSA team will design and build a probe (the NeoPod) to collect,
store, and transmit data via RF to a Ground Station.
The NeoPod will operate in a stationary position for a 100 hour mission
lifetime in a laboratory environment on Earth. The NeoPod system
must be contained within a 25 cm closed shell, and weigh less than 10
kg. The science payload must consist of two sensors that are relevant to
the study of Europa.
NeoPod is powered on and begins
collecting and storing science data
DataData
Ground Station sends command to
NeoPod to begin transmission of data
Command
NeoPod begins to transmit
stored data
Ground Station receives
and records data
Collect & Store (2hr) Transmit (8 min) Record
Total: 100 hour mission timeline
100 hr mission
Expected final voltage (with error bounds)
Cutoff voltage
20% Margin
2% error
Motivation:
NASA has identified Europa as a high priority target because of its potential to
support life in its subsurface ocean
In order to explore the surface of Europa, Ball Aerospace has developed a
mission concept to use a number of simple and relatively inexpensive probes
rather than a single, large, and expensive lander. This project will provide a
stepping stone for future missions exploring Europa by demonstrating the
feasibility of collecting relevant data for 100 hours
Pictured above is the Functional
Block Diagram of the NeoPod
system. It consists of a two
sensor payload, an FPGA (Field
Programmable Gate Array) for
C&DH, a transceiver and a
surface-mounted patch antenna
for two-way communications
system, and an independent
power system of fifteen LiPo
(Lithium Polymer) batteries
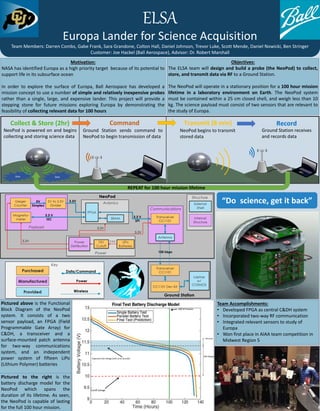
Pictured to the right is the
battery discharge model for the
NeoPod which spans the
duration of its lifetime. As seen,
the NeoPod is capable of lasting
for the full 100 hour mission.
REPEAT for 100 hour mission lifetime
Team Accomplishments:
• Developed FPGA as central C&DH system
• Incorporated two-way RF communication
• Integrated relevant sensors to study of
Europa
• Won first place in AIAA team competition in
Midwest Region 5
Pictured to the right is the
battery discharge model for the
NeoPod which spans the
duration of its lifetime. As seen,
the NeoPod is capable of lasting
for the full 100 hour mission.
“Do science, get it back”