第4回全脳アーキテクチャ・ハッカソン「AIにまなざしを」説明会資料 眼球運動タスクを基底核による強化学習で解く。 CFP: https://wba-initiative.org/3151/ タスクの動画: https://www.youtube.com/channel/UCT708fP0Tj38-PDV3t8wveA/videos
![脳器官フレームワーク
(標準外部仕様)
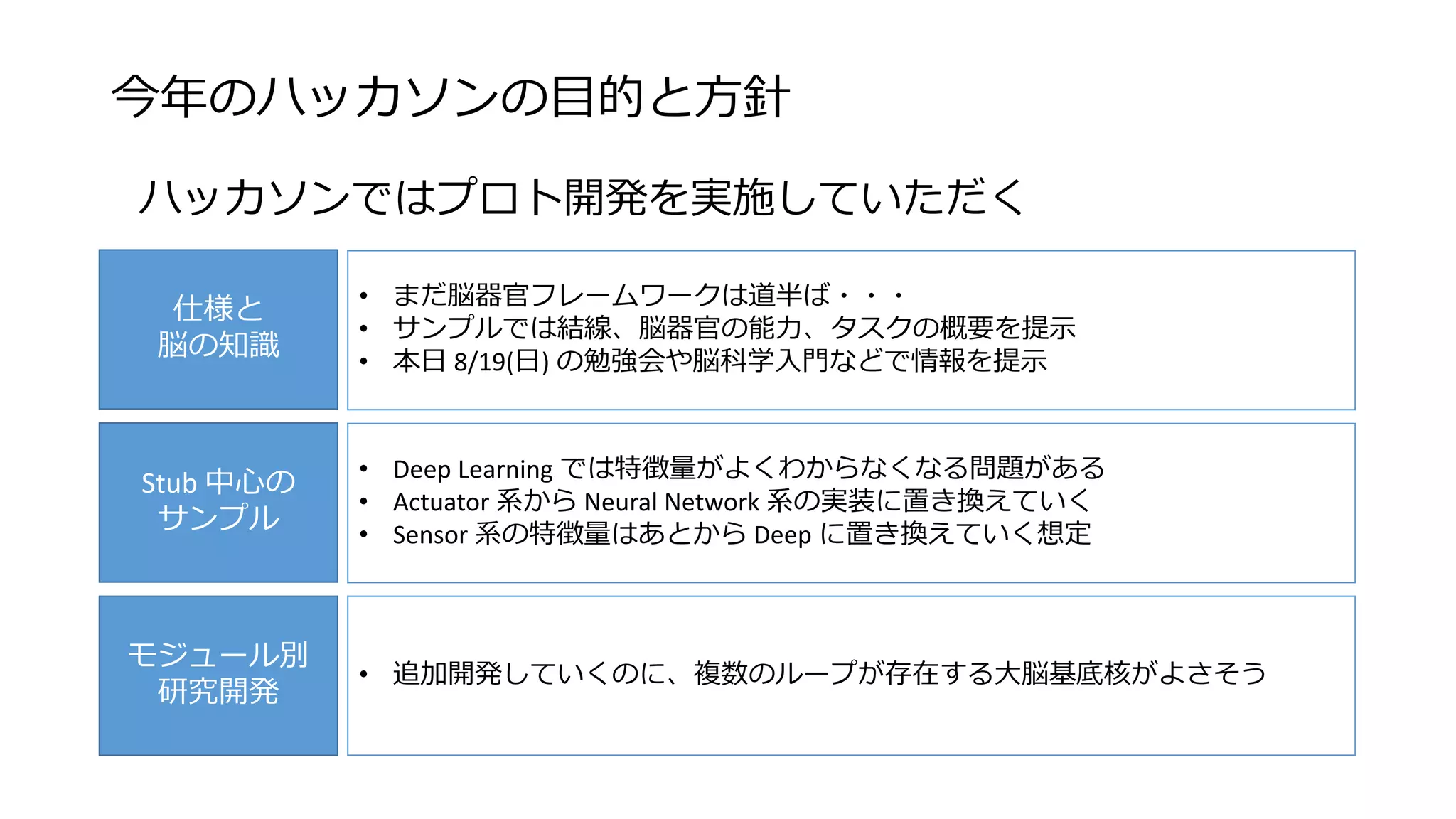
今年の主要な活動
脳型 AGI の仕様として脳器官の結線、I/F、能力、タスクを整理中
Agent
St.
ML
St.
St.
Environment
タスク
(テスト)
脳器官I/F
(情報処理的な
意味付け)
WBCA
(コネクトーム)
脳器官
の能力
:スタブ
:機械学習[WBA開発]
:脳器官I/F
St.
ML](https://image.slidesharecdn.com/wbahackathonorientation180819j-180824053124/75/4-5-2048.jpg)
![今後の研究・開発シナリオ
追加開発
プロト開発
プロト開発
マージ開発
プロト開発
ML
St.
St.
St.
Environment
St.
ML
St.
St.
Environment
St.
St.
ML
St.
Environment
ML
ML
St.
St.
Environment
St.
St.
ML
ML
Environment
追加開発
改良開発
ML
ML
St.
St.
Environment
St.
ML
ML
ML
Environment
マージ開発
ML
ML
ML
ML
Environment
MLへの置き換え: 帰納推論の範囲の拡大
脳型アーキテクチャ
の汎用性①脳器官
フレームワーク
(I/F・能力)設計
②脳に制約された
リファクタリング
アーキ拡張
ML
ML
ML
ML
Environment
③メタレベルでの
表現操作の仕組み
(理論)
W
B
A
の
完
成
:スタブ
:機械学習[WBA開発]
:脳器官I/F
St.
ML
全部
アーキ
テクチャ
追加開発
プロト開発
プロト開発
マージ開発
プロト開発
ML
St.
St.
St.
Environment
St.
ML
St.
St.
Environment
St.
St.
ML
St.
Environment
ML
ML
St.
St.
Environment
St.
St.
ML
ML
Environment
追加開発
改良開発
ML
ML
St.
St.
Environment
St.
ML
ML
ML
Environment
マージ開発
ML
ML
ML
ML
Environment](https://image.slidesharecdn.com/wbahackathonorientation180819j-180824053124/75/4-6-2048.jpg)




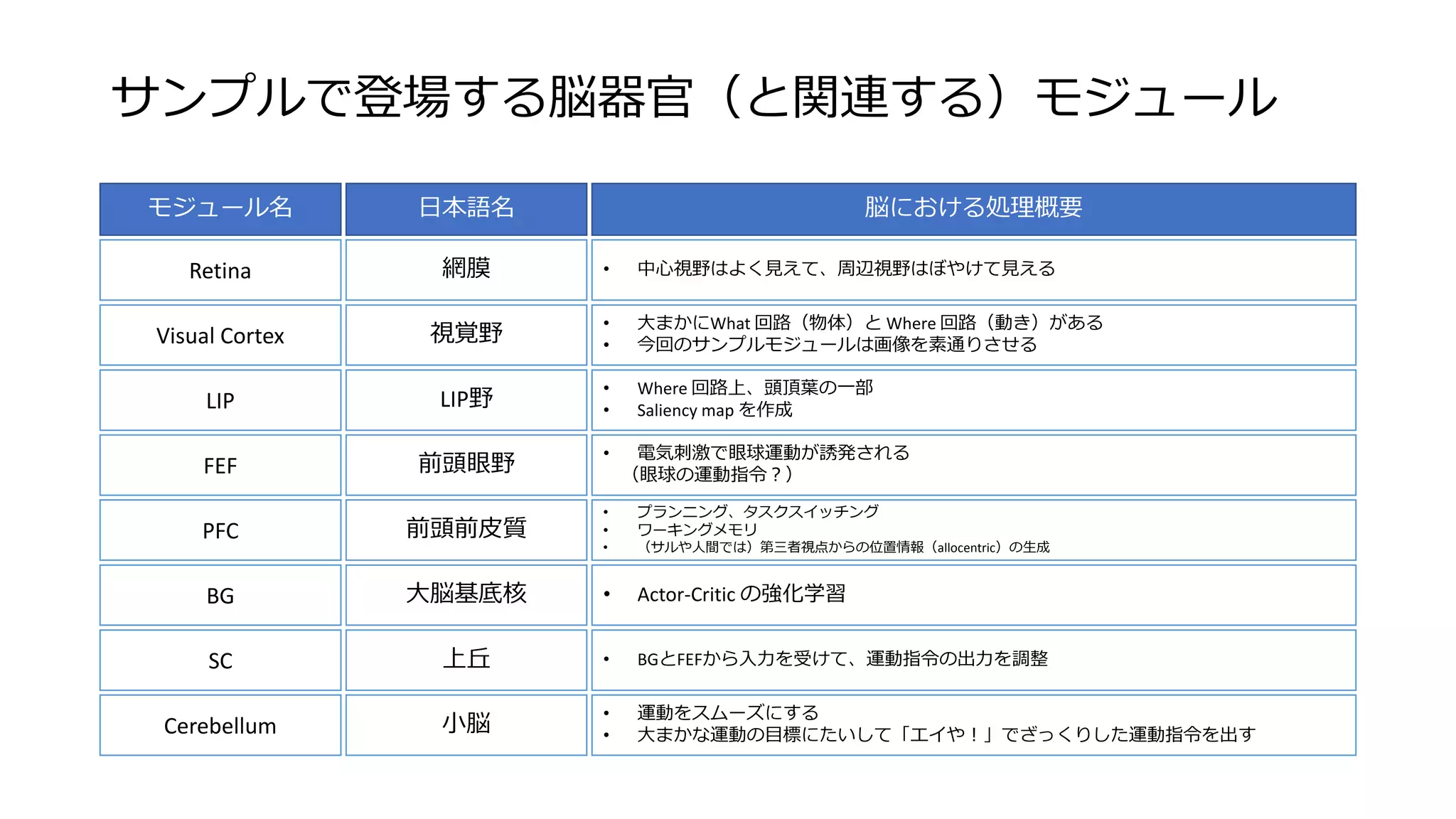
![Saccade の場合の配線
Environment
Retina
Visual
Cortex
LIP
FEF PFC
SC BG
Hippocampal
Formation
RetinalAccumulator
E
位置依存のAccumulation
NonRetinal
Accumulator
パネル上のAllocentric な位置情報
Image
周辺視の
ぼかし処理
サンプルでは
素通り
Saliency Map 作成
位置に依存しない
Accumulation
[[likelihood, ex, ey],
[likelihood, ex, ey],
…
[likelihood, ex, ey]]
Allocentric な位置情報
フェーズの切替管理等
パネル上の
Allocentric な
位置情報,
その他?
Image
Saliency
Map
?
? ?
[likelihood_threshold,
likelihood_threshold,
…
likelihood_threshold]
?
?
各Accumulatorの
Likelihood に対する
閾値調整
Action=[ex, ey] or None
?は参加者の設計・実装が必要
Retinal
Image
Reward](https://image.slidesharecdn.com/wbahackathonorientation180819j-180824053124/75/4-28-2048.jpg)
![Pursuit の場合の配線
Environment
Retina
Visual
Cortex
LIP
FEF PFC
SC BG
Hippocampal
Formation
RetinopicAccumulator
E
位置依存のAccumulation
NonRetinopic
Accumulator
パネル上のAllocentric な位置情報
Image
周辺視の
ぼかし処理
サンプルでは
素通り
Saliency Map 作成
位置に依存しない
Accumulation
[[likelihood, ex, ey],
[likelihood, ex, ey],
…
[likelihood, ex, ey]]
Allocentric な位置情報
フェーズの切替管理等
パネル上の
Allocentric な
位置情報,
その他?
Retinal
Image
Saliency
Map
?
? ?
[likelihood_threshold,
likelihood_threshold,
…
likelihood_threshold]
?
?
各Accumulatorの
Likelihood に対する
閾値調整
Action=[ex, ey] or None
Cerebellum
Action=[ex, ey]
?
Retinal
Image
?は参加者の設計・実装が必要
SC の出力が None でなければ
SC 出力を優先
Likelihood が
threshold を超えたら
Action を送信 Reward](https://image.slidesharecdn.com/wbahackathonorientation180819j-180824053124/75/4-29-2048.jpg)


![[DL輪読会]Training RNNs as Fast as CNNs](https://cdn.slidesharecdn.com/ss_thumbnails/20171002dlhacks-171002105129-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会] Spectral Norm Regularization for Improving the Generalizability of De...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhackspectralnorm1-170907072536-thumbnail.jpg?width=640&height=640&fit=bounds)












![[Dl輪読会]dl hacks輪読](https://cdn.slidesharecdn.com/ss_thumbnails/dldlhacks-161125051944-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DLHacks 実装] DeepPose: Human Pose Estimation via Deep Neural Networks](https://cdn.slidesharecdn.com/ss_thumbnails/20170821onodeepposepresentation-170928100207-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Dl輪読会]AdaNet: Adaptive Structural Learning of Artificial Neural Networks](https://cdn.slidesharecdn.com/ss_thumbnails/20170602dlhacks-170602005026-thumbnail.jpg?width=640&height=640&fit=bounds)










































