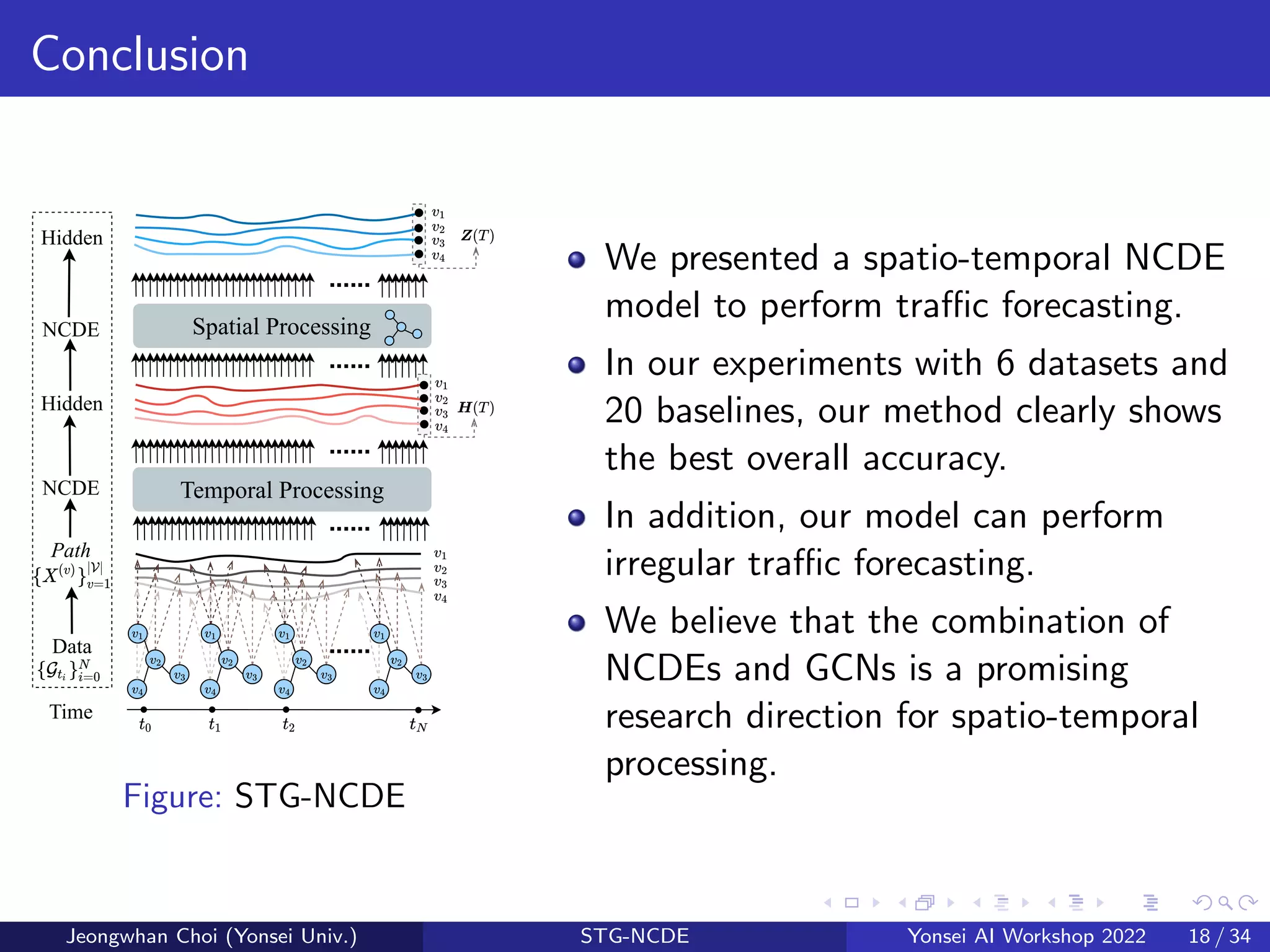
The document presents a novel spatio-temporal graph neural controlled differential equation (stg-ncde) model aimed at enhancing traffic forecasting accuracy by integrating neural controlled differential equations with graph convolutional networks. Experimental results demonstrated that stg-ncde outperforms various baseline models across multiple datasets, showcasing its capability to handle irregular time-series data without changing its architecture. The authors suggest that this combination of technologies offers promising directions for future research in spatio-temporal processing.
![Motivation (2/3)
Model Temporal Dependency Spatial Dependency
STGCN [11] GLU GCN
DCRNN [8] LSTM GCN (Pre-defined Graph)
GraphWaveNet [10] TCN GCN (Adaptive Graph)
ASTGCN [5] 1D CNN+Attention Attention+GCN(Pre-defined Graph)
STSGCN [9] GCN (Sliding Window) GCN (Multiple Graph)
AGCRN [1] GRU GCN (Adaptive Graph)
STFGNN [7] 1D CNN GCN (Multiple Graph)
STGODE [4] TCN ODE+GCN (Dynamic Graph)
STG-NDCE NCDE NCDE + GCN (Adaptive Graph)
Table: Classification of spatial-temporal modeling methods
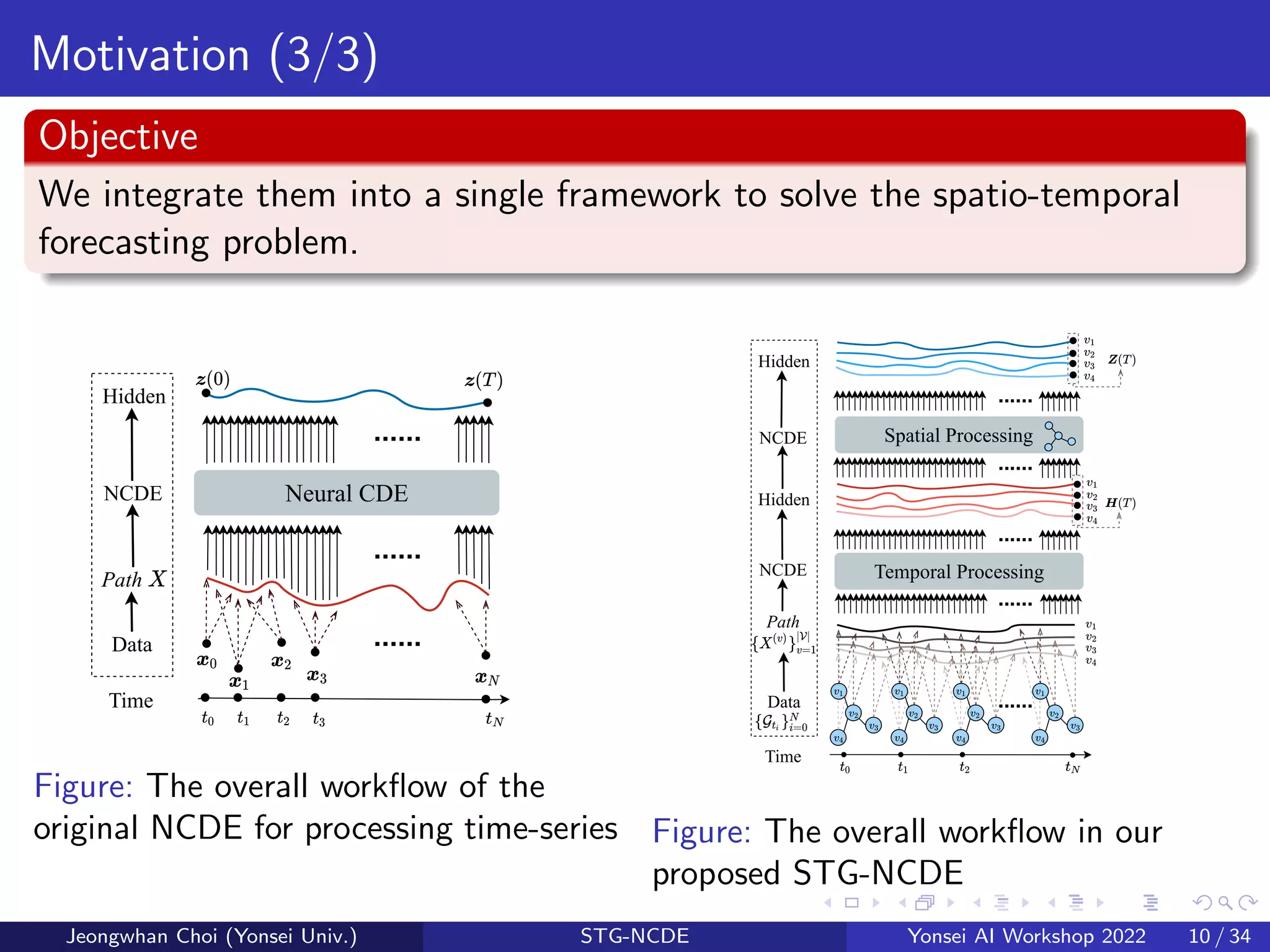
Motivation
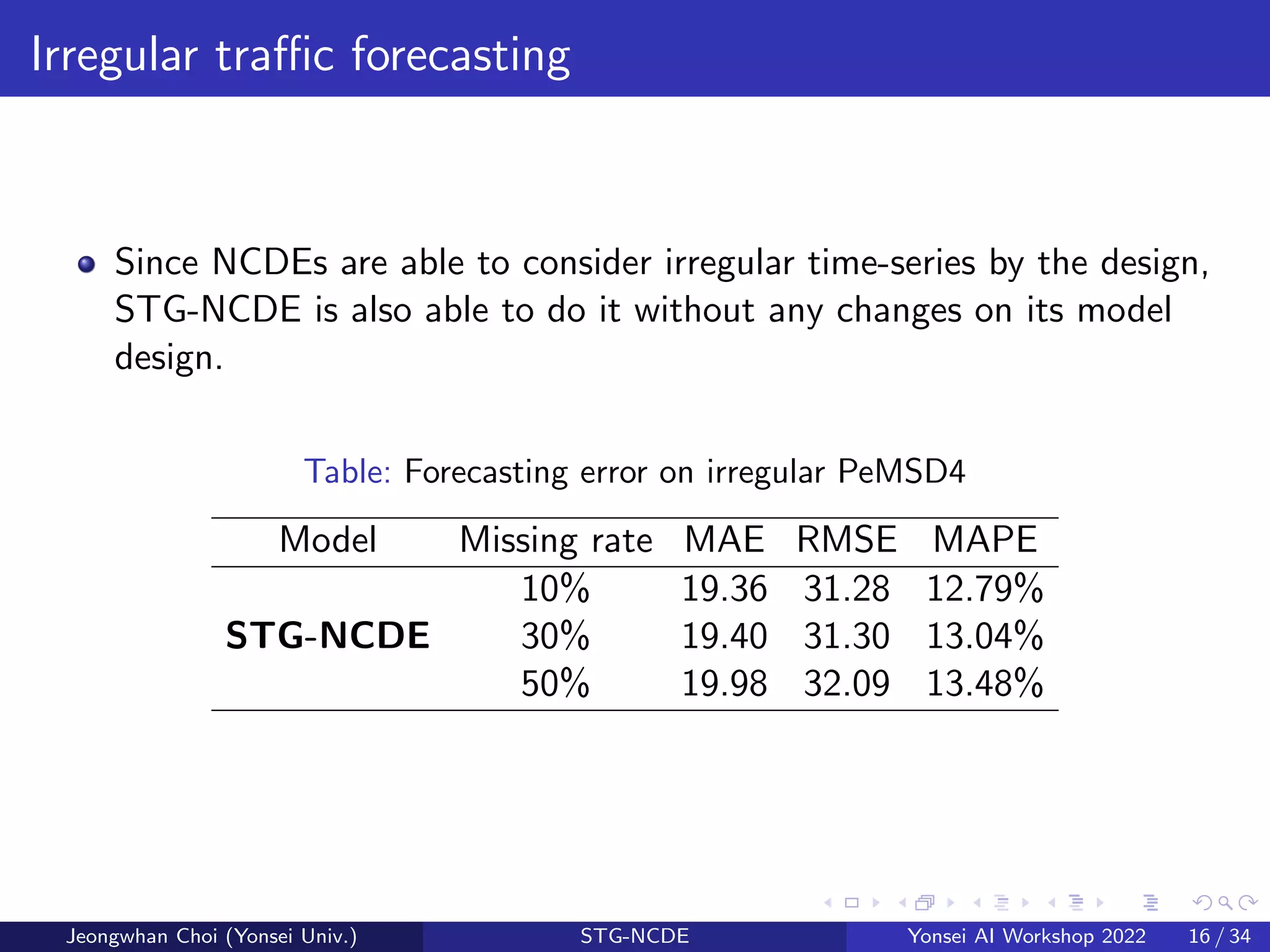
It has not been studied yet how to combine the NCDE technology and the
graph convolutional processing technology.
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 9 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-9-2048.jpg)
![Reference (1/3)
[1] Lei Bai et al. “Adaptive Graph Convolutional Recurrent Network for
Traffic Forecasting”. In: NeurIPS. Vol. 33. 2020, pp. 17804–17815.
[2] Ricky T. Q. Chen et al. “Neural Ordinary Differential Equations”.
In: NeurIPS. 2018.
[3] Yuzhou Chen, Ignacio Segovia-Dominguez, and Yulia R Gel.
“Z-GCNETs: Time Zigzags at Graph Convolutional Networks for
Time Series Forecasting”. In: ICML. 2021.
[4] Zheng Fang et al. “Spatial-Temporal Graph ODE Networks for
Traffic Flow Forecasting”. In: KDD. 2021.
[5] Shengnan Guo et al. “Attention Based Spatial-Temporal Graph
Convolutional Networks for Traffic Flow Forecasting”. In: AAAI. July
2019. doi: 10.1609/aaai.v33i01.3301922.
[6] Patrick Kidger et al. “Neural Controlled Differential Equations for
Irregular Time Series”. In: NeurIPS (2020).
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 19 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-19-2048.jpg)
![Reference (2/3)
[7] Mengzhang Li and Zhanxing Zhu. “Spatial-Temporal Fusion Graph
Neural Networks for Traffic Flow Forecasting”. In: AAAI. May 2021.
[8] Yaguang Li et al. “Diffusion Convolutional Recurrent Neural
Network: Data-Driven Traffic Forecasting”. In: ICLR. 2018.
[9] Chao Song et al. “Spatial-Temporal Synchronous Graph
Convolutional Networks: A New Framework for Spatial-Temporal
Network Data Forecasting”. In: AAAI. Apr. 2020. doi:
10.1609/aaai.v34i01.5438.
[10] Zonghan Wu et al. “Graph WaveNet for Deep Spatial-Temporal
Graph Modeling”. In: IJCAI. July 2019, pp. 1907–1913.
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 20 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-20-2048.jpg)
![Reference (3/3)
[11] Bing Yu, Haoteng Yin, and Zhanxing Zhu. “Spatio-Temporal Graph
Convolutional Networks: A Deep Learning Framework for Traffic
Forecasting”. In: IJCAI. July 2018. doi:
10.24963/ijcai.2018/505. url:
https://doi.org/10.24963/ijcai.2018/505.
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 21 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-21-2048.jpg)
![Neural Ordinary Differential Equations (NODEs)
NODEs introduced how to
continuously model residual neural
networks (ResNets) with differential
equations.
NODE can be written as follows:
z(T) = z(0) +
Z T
0
f (z(t), t; θf )dt; (1)
where the neural network
parameterized by θf approximates
z(t)
dt .
Figure: ResNet and NODE figures
from [2]
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 24 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-24-2048.jpg)
![Neural controlled differential equations (NCDEs)
NCDEs [6] generalize RNNs in a continuous
manner and can be written as follows:
z(T) = z(0) +
Z T
0
f (z(t); θf )dX(t) (2)
= z(0) +
Z T
0
f (z(t); θf )
dX(t)
dt
dt, (3)
Time
Path
NCDE
Data
Hidden
Neural CDE
......
......
......
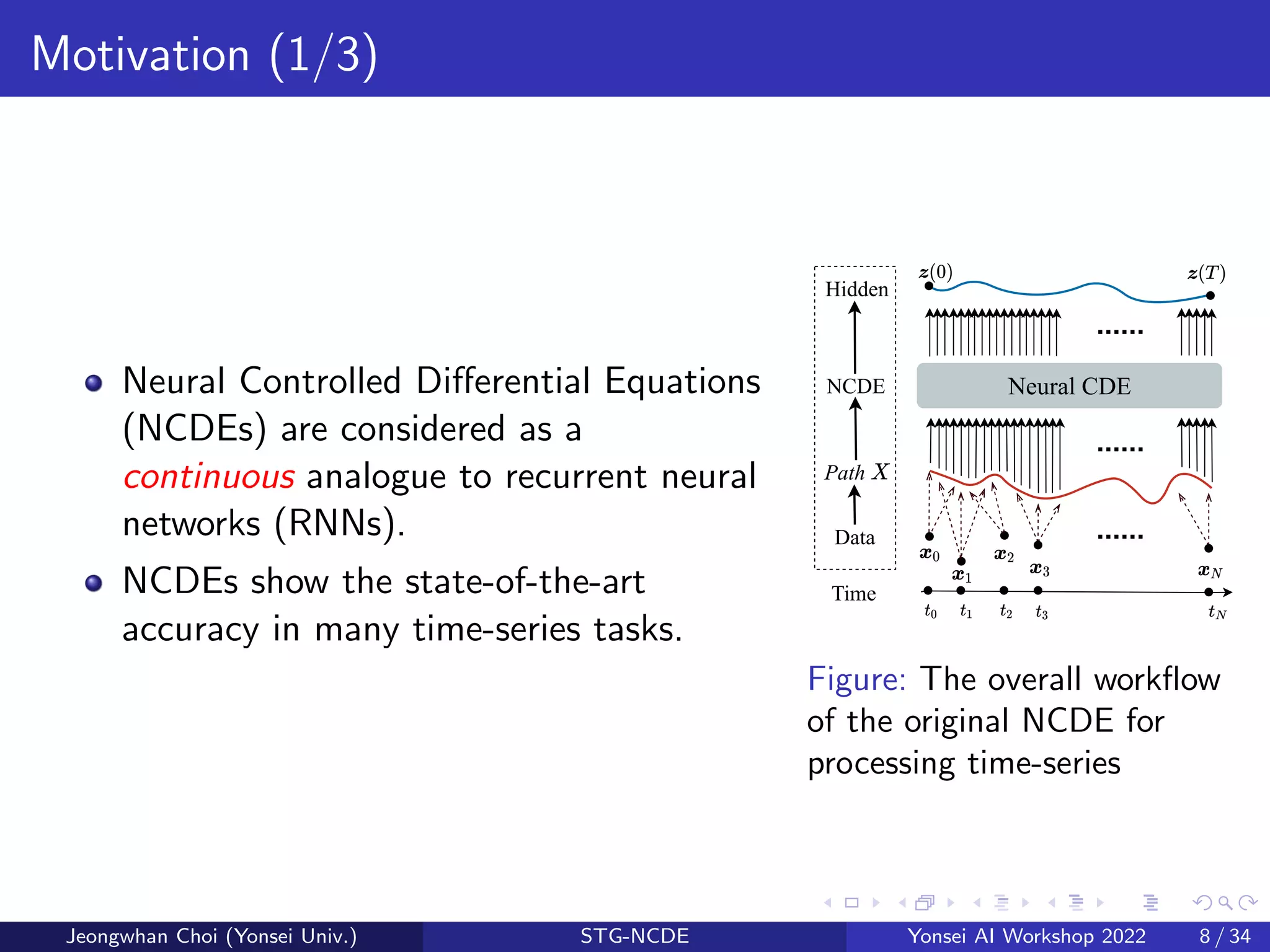
Figure: The overall workflow
of the original NCDE for
processing time-series.
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 25 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-25-2048.jpg)
![Neural controlled differential equations (NCDEs)
NCDEs [6] generalize RNNs in a continuous
manner and can be written as follows:
z(T) = z(0) +
Z T
0
f (z(t); θf )dX(t) (2)
= z(0) +
Z T
0
f (z(t); θf )
dX(t)
dt
dt, (3)
The original CDE formulation in Eq. (2)
reduces Eq. (3) where z(t)
dt is approximated
by f (z(t); θf )dX(t)
dt .
Time
Path
NCDE
Data
Hidden
Neural CDE
......
......
......
Figure: The overall workflow
of the original NCDE for
processing time-series.
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 25 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-26-2048.jpg)
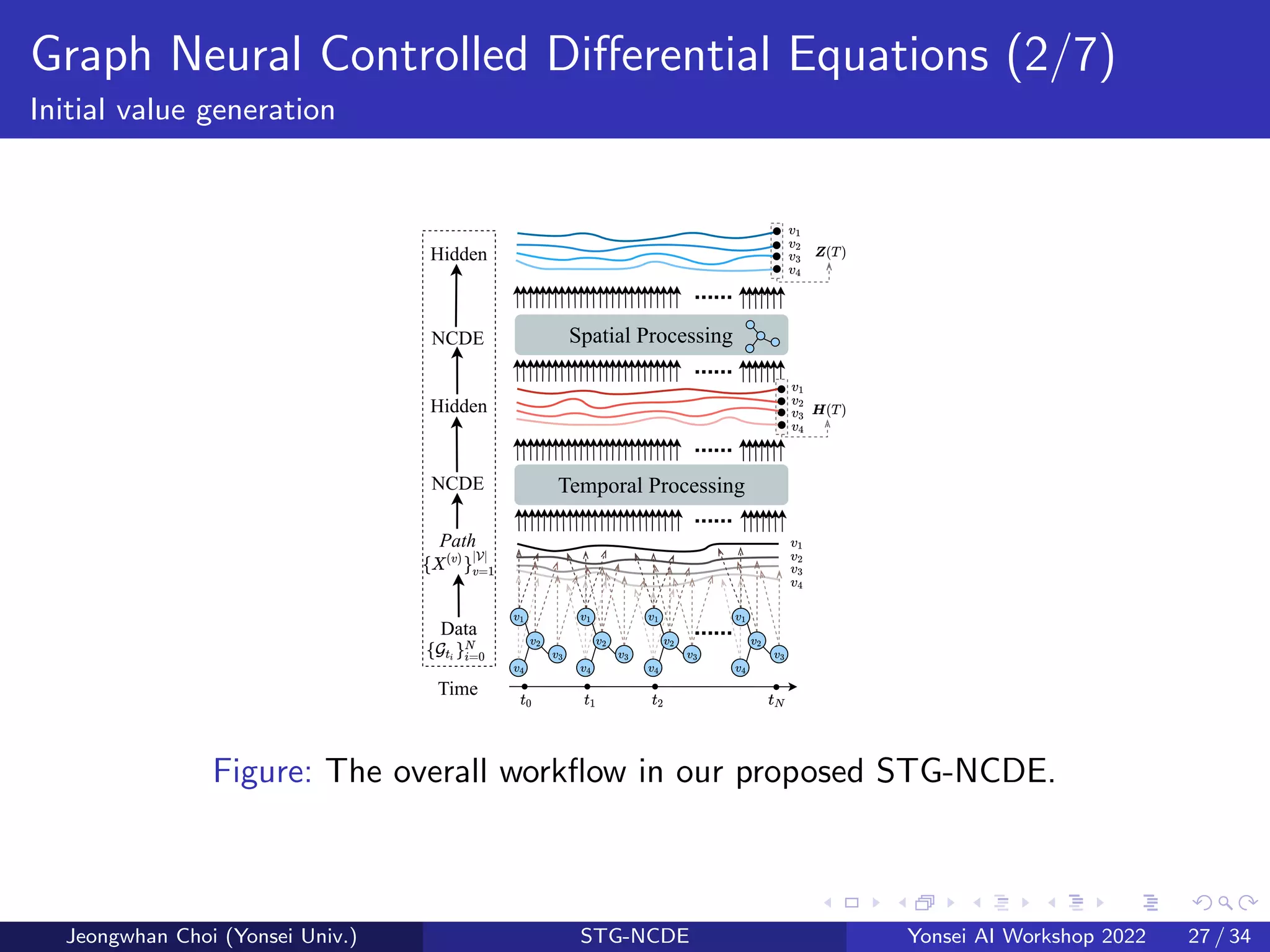
![Graph Neural Controlled Differential Equations (3/7)
Initial value generation
Time
Path
NCDE
Data
Hidden
Temporal Processing
Spatial Processing
NCDE
Hidden
......
......
......
......
......
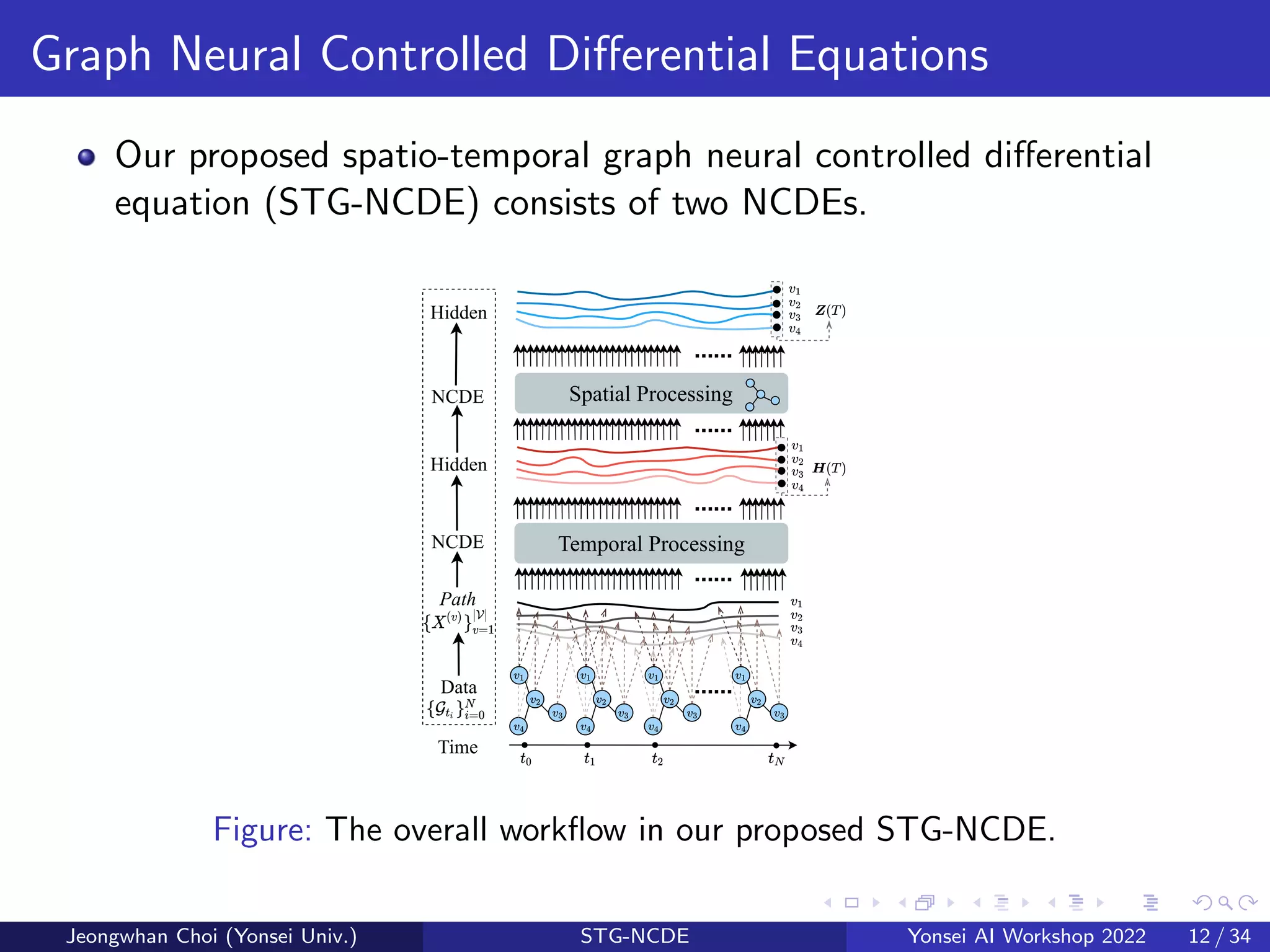
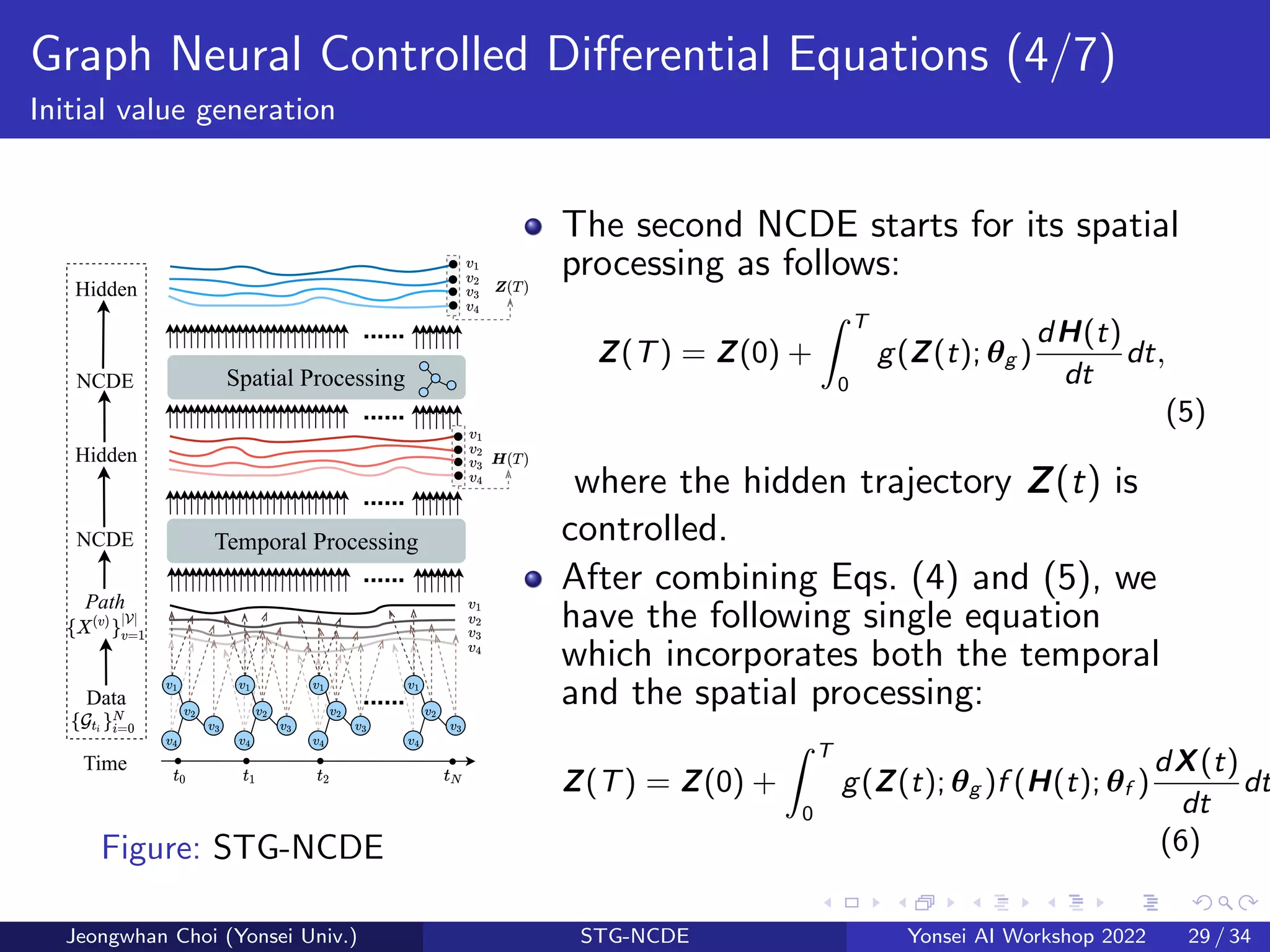
Figure: STG-NCDE
The first NCDE for the temporal
processing can be written as follows:
H(T) = H(0) +
Z T
0
f (H(t); θf )
dX(t)
dt
dt,
(4)
where H(v)(t) is a hidden trajectory
(over time t ∈ [0, T]) of the temporal
information of node v, and X(t) is a
matrix whose v-th row is X(v).
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 28 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-29-2048.jpg)
![Graph Neural Controlled Differential Equations (6/7)
Initial value generation
The definition of g : R|V|×dim(z(v)) → R|V|×dim(z(v)) is as follows:
g(Z(t); θg ) = ψ(FC|V|×dim(z(v))→|V|×dim(z(v))(B1)), (8)
B1 = (I + ϕ(σ(E · E⊺
)))B0Wspatial , (9)
B0 = σ(FC|V|×dim(z(v))→|V|×dim(z(v))(Z(t))), (10)
where I is the |V| × |V| identity matrix, ϕ is a softmax activation,
E ∈ R|V|×C is a trainable node-embedding matrix and Wspatial is a
trainable weight transformation matrix.
ϕ(σ(E · E⊺)) corresponds to the normalized adjacency matrix
D−1
2 AD−1
2 , where A = σ(E · E⊺) and the softmax activation plays a
role of normalizing the adaptive adjacency matrix [10, 1].
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 31 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-32-2048.jpg)
![Datasets
We use six real-world traffic datasets which were widely used in the
previous studies [11, 5, 4, 3, 9].
Dataset |V| Time Steps Time Range Type
PeMSD3 358 26,208 09/2018 - 11/2018 Volume
PeMSD4 307 16,992 01/2018 - 02/2018 Volume
PeMSD7 883 28,224 05/2017 - 08/2017 Volume
PeMSD8 170 17,856 07/2016 - 08/2016 Volume
PeMSD7(M) 228 12,672 05/2012 - 06/2012 Velocity
PeMSD7(L) 1,026 12,672 05/2012 - 06/2012 Velocity
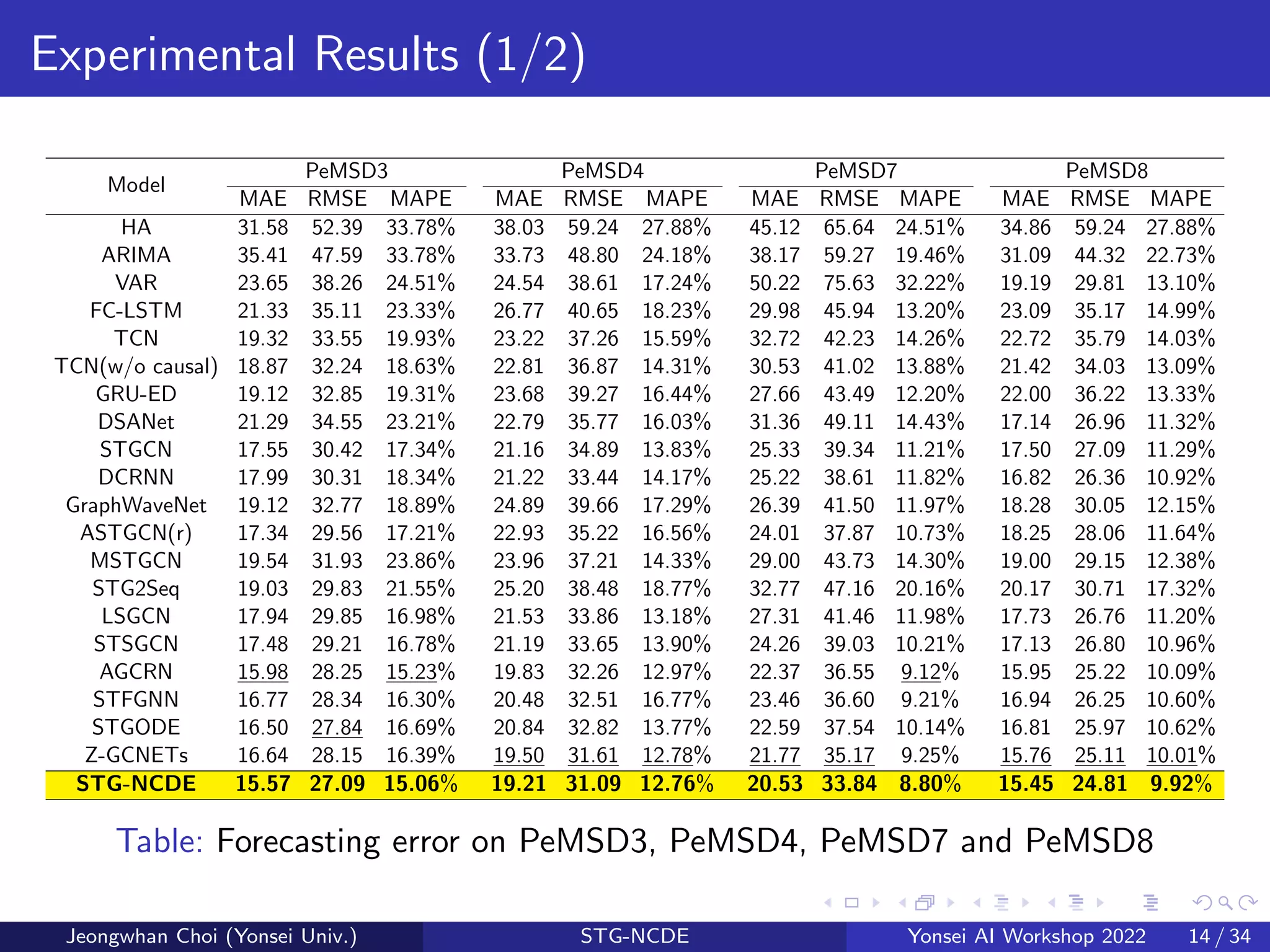
Table: The summary of the datasets used in our work. We predict either traffic
volume (i.e., # of vehicles) or velocity.
Jeongwhan Choi (Yonsei Univ.) STG-NCDE Yonsei AI Workshop 2022 33 / 34](https://image.slidesharecdn.com/dhcx9l1rc2acdkwbnqyx-aaai22-workshop-221019003243-979010ab/75/Yonsei-AI-Workshop-2022-Graph-Neural-Controlled-Differential-Equations-for-Traffic-Forecasting-34-2048.jpg)
![[20240325_LabSeminar_Huy]Spatial-Temporal Fusion Graph Neural Networks for Tr...](https://cdn.slidesharecdn.com/ss_thumbnails/20240325labseminarhuystfgnn-240409103218-8b4b7f23-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240805_LabSeminar_Huy]GPT-ST: Generative Pre-Training of Spatio-Temporal G...](https://cdn.slidesharecdn.com/ss_thumbnails/20240805labseminarhuygpt-st-240806102941-cd305d0d-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240520_LabSeminar_Huy]DSTAGNN: Dynamic Spatial-Temporal Aware Graph Neural...](https://cdn.slidesharecdn.com/ss_thumbnails/20240520labseminarhuydstagnn-240520123156-67d80b3a-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240429_LabSeminar_Huy]Spatio-Temporal Graph Neural Point Process for Traff...](https://cdn.slidesharecdn.com/ss_thumbnails/20240429labseminarhuynpp-240429122642-30caa8b7-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Seminar] hyunwook 0624](https://cdn.slidesharecdn.com/ss_thumbnails/seminarhyunwook0624-200725001151-thumbnail.jpg?width=640&height=640&fit=bounds)



![[20240617_LabSeminar_Huy]Long-term Spatio-Temporal Forecasting via Dynamic Mu...](https://cdn.slidesharecdn.com/ss_thumbnails/20240617labseminarhuylstf-240624082154-84b13b22-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240415_LabSeminar_Huy]Deciphering Spatio-Temporal Graph Forecasting: A Cau...](https://cdn.slidesharecdn.com/ss_thumbnails/20240415labseminarhuydecipher-240416043604-ff3fafd1-thumbnail.jpg?width=640&height=640&fit=bounds)



![[20240318_LabSeminar_Huy]GSTNet: Global Spatial-Temporal Network for Traffic ...](https://cdn.slidesharecdn.com/ss_thumbnails/20240318labseminarhuygstnet-240409103756-4593be7d-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240628_LabSeminar_Huy]ScalableSTGNN.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240628labseminarhuyscalablestgnn-240628124039-93589631-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240422_LabSeminar_Huy]Taming_Effect.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240422labseminarhuytamingeffect-240423153149-d879b2ce-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Seminar] 20210122 Kyunghwan Moon](https://cdn.slidesharecdn.com/ss_thumbnails/210122revisitingspatial-temporalsimilarityadeeplearningframeworkfortrafficprediction-210201005515-thumbnail.jpg?width=640&height=640&fit=bounds)

![[20240527_LabSeminar_Huy]Meta-Graph.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240527labseminarhuymeta-graph-240603120740-05a0fa30-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240408_LabSeminar_Huy]PivotalSTGNN.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240408labseminarhuypivotalstgnn-240408123002-61e9cc31-thumbnail.jpg?width=640&height=640&fit=bounds)

![[20240712_LabSeminar_Huy]Spatio-Temporal Neural Structural Causal Models for ...](https://cdn.slidesharecdn.com/ss_thumbnails/20240712labseminarhuystnscm-240723105601-536070f4-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240701_LabSeminar_Huy]TelTrans: Applying Multi-Type Telecom Data to Transp...](https://cdn.slidesharecdn.com/ss_thumbnails/20240701labseminarhuyteltrans-240702022853-b137d3d6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240729_LabSeminar_Huy]Spatio-Temporal Self-Supervised Learning for Traffic...](https://cdn.slidesharecdn.com/ss_thumbnails/20240729labseminarhuystsll-240806102730-f08a46d6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[20240703_LabSeminar_Huy]MakeGNNGreatAgain.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240703labseminarhuymakegnngreatagain-240704111952-a7569149-thumbnail.jpg?width=640&height=640&fit=bounds)

![[KAIA2021] Graph-based Collaborative Filtering and Neural ODEs](https://cdn.slidesharecdn.com/ss_thumbnails/a7js83agtzaovjxyprgq-kaia2021tutorial-lt-ocf-221019003243-c00be3eb-thumbnail.jpg?width=640&height=640&fit=bounds)