活動配分モデルの整理 4
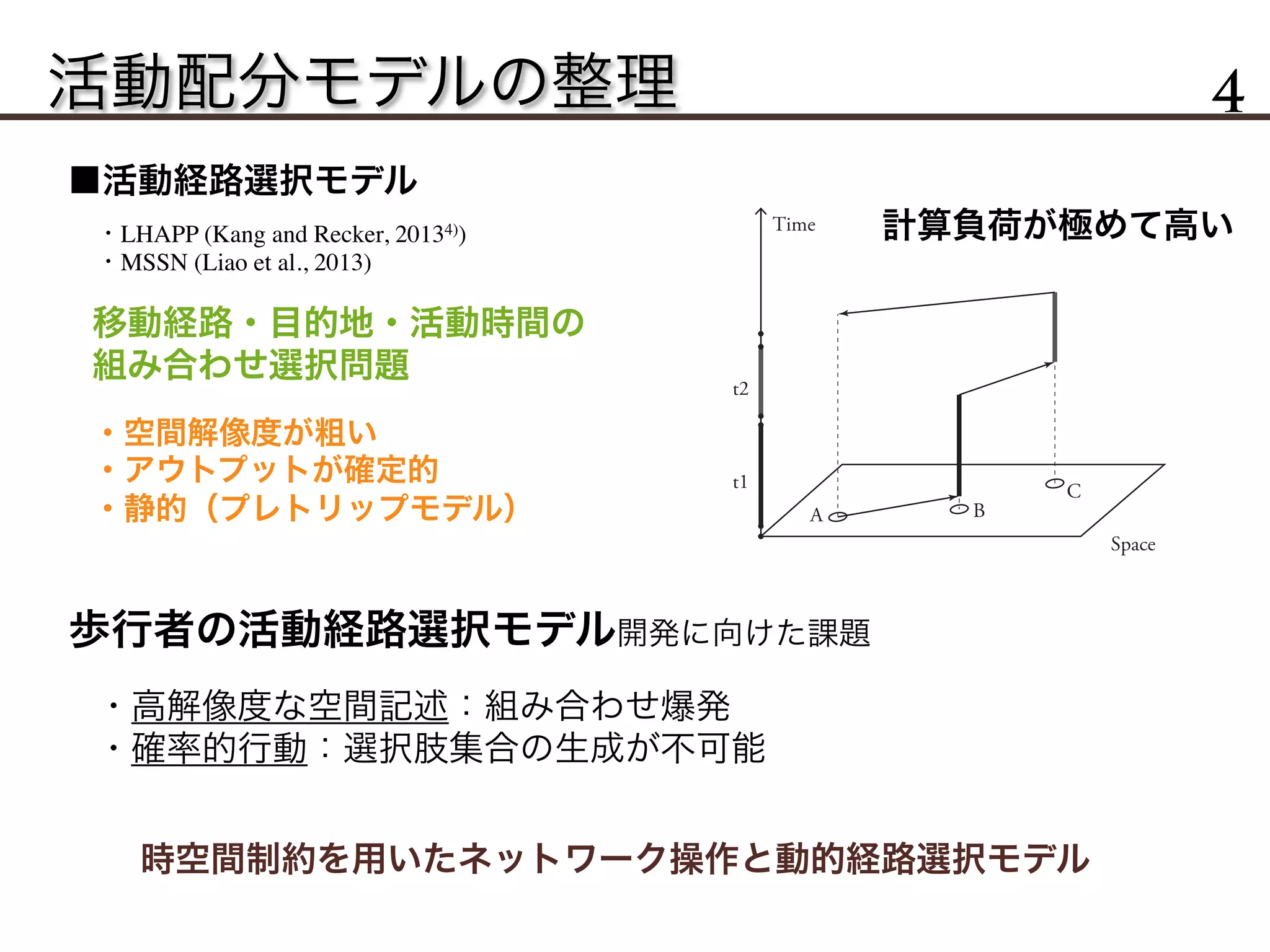
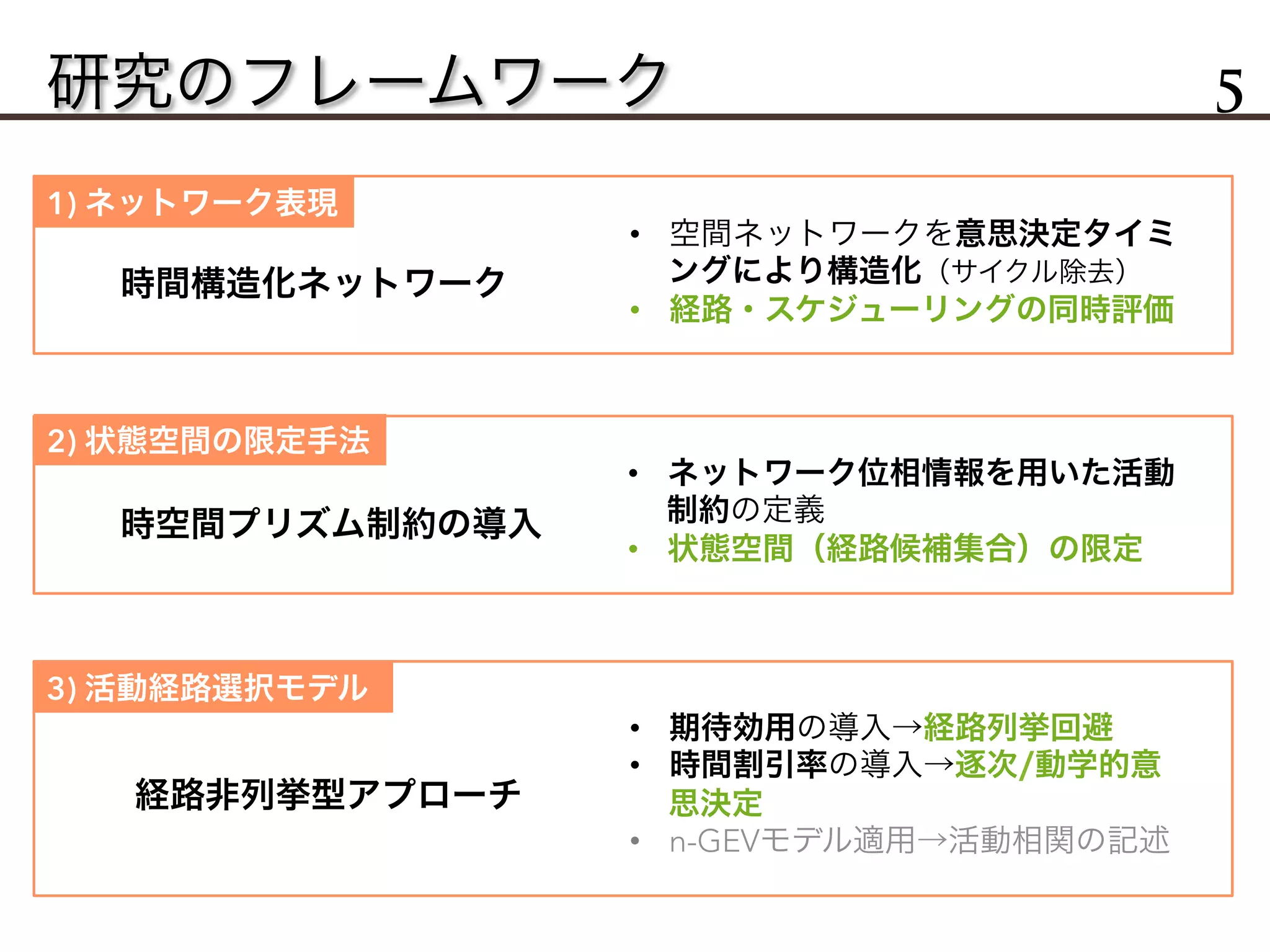
時空間制約を用いたネットワーク操作と動的経路選択モデル
・LHAPP (Kangand Recker, 20134))
・MSSN (Liao et al., 2013)
・空間解像度が粗い
・アウトプットが確定的
・静的(プレトリップモデル)
歩行者の活動経路選択モデル開発に向けた課題
・高解像度な空間記述:組み合わせ爆発
・確率的行動:選択肢集合の生成が不可能
■活動経路選択モデル
t1
t2
Space
Time
A B
C
移動経路・目的地・活動時間の
組み合わせ選択問題
計算負荷が極めて高い
時間構造化ネットワーク 6
G =(N, A)
i, j ∈ N
:ノード
(i, j) ∈ A
:リンク
G = (S,E)
S =[S0,...,St,...,ST ]
E =[E0,..., Et,..., ET−1]
移動空間ネットワーク 時間構造化ネットワーク
1 2 3 4 5
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
21 22 23 24 25
y
x
: Node : Link
y
Space
x
t t
Time t=1
t=0
t=2
t=3
t=4
t=5
move
from 8 to 9
from 9 to 14
at 14
from 13 to 8
move
from 14 to 13
move
move
stay
ψ =[8,9,14,13,8] ψ =[(0,8),(1,9),(2,14),(3,14),(4,13),(5,8)]
st = (t,i) ∈ St
et = (st,st+1) ∈ Et
:状態ノード
:状態アーク
移動経路:
xy平面・t軸への射影により,移動経路・スケジューリングが同時評価可能
膨大な状態量と組み合わせ爆発
δ( j |i)
:接続条件
活動経路:
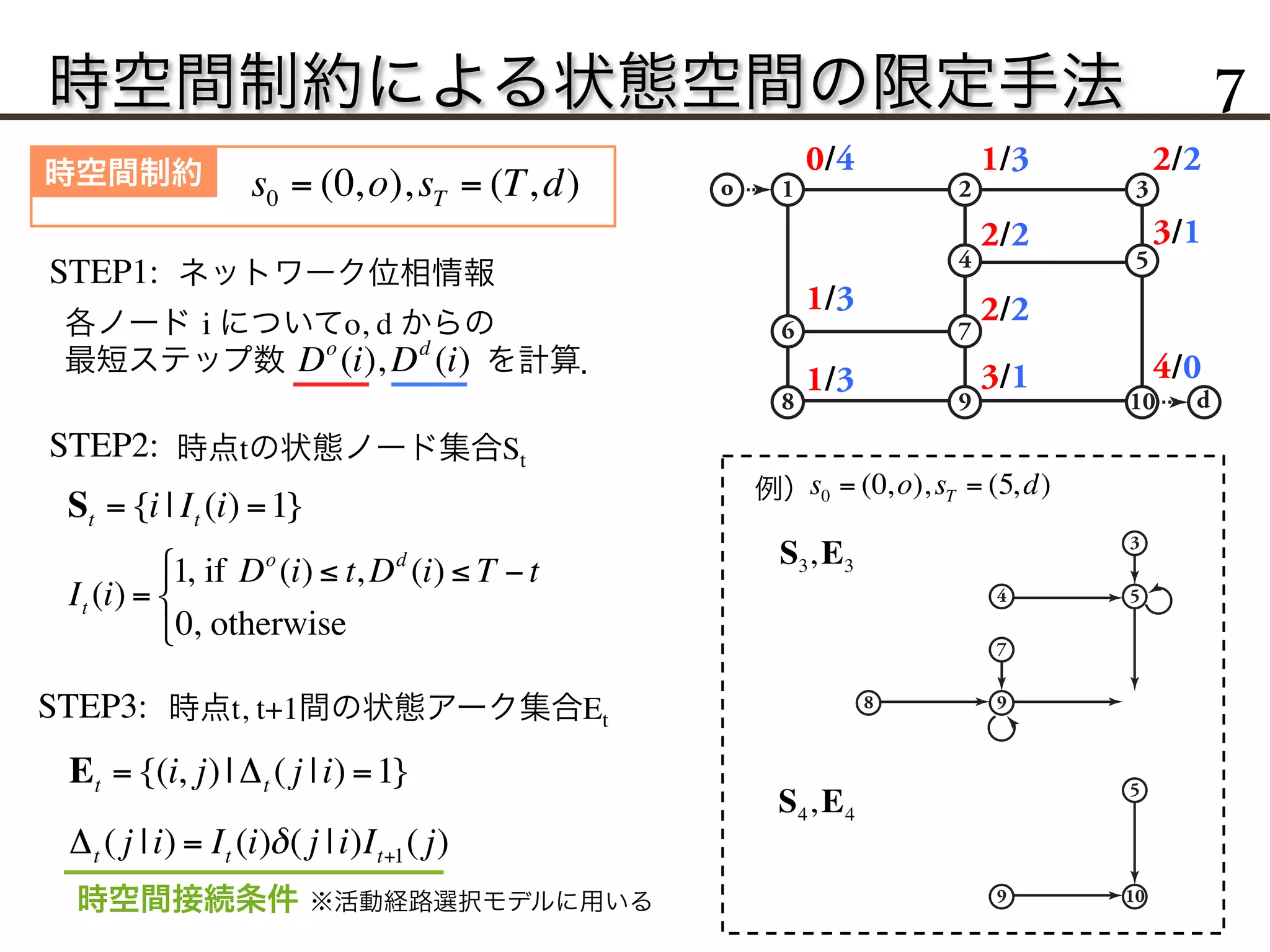
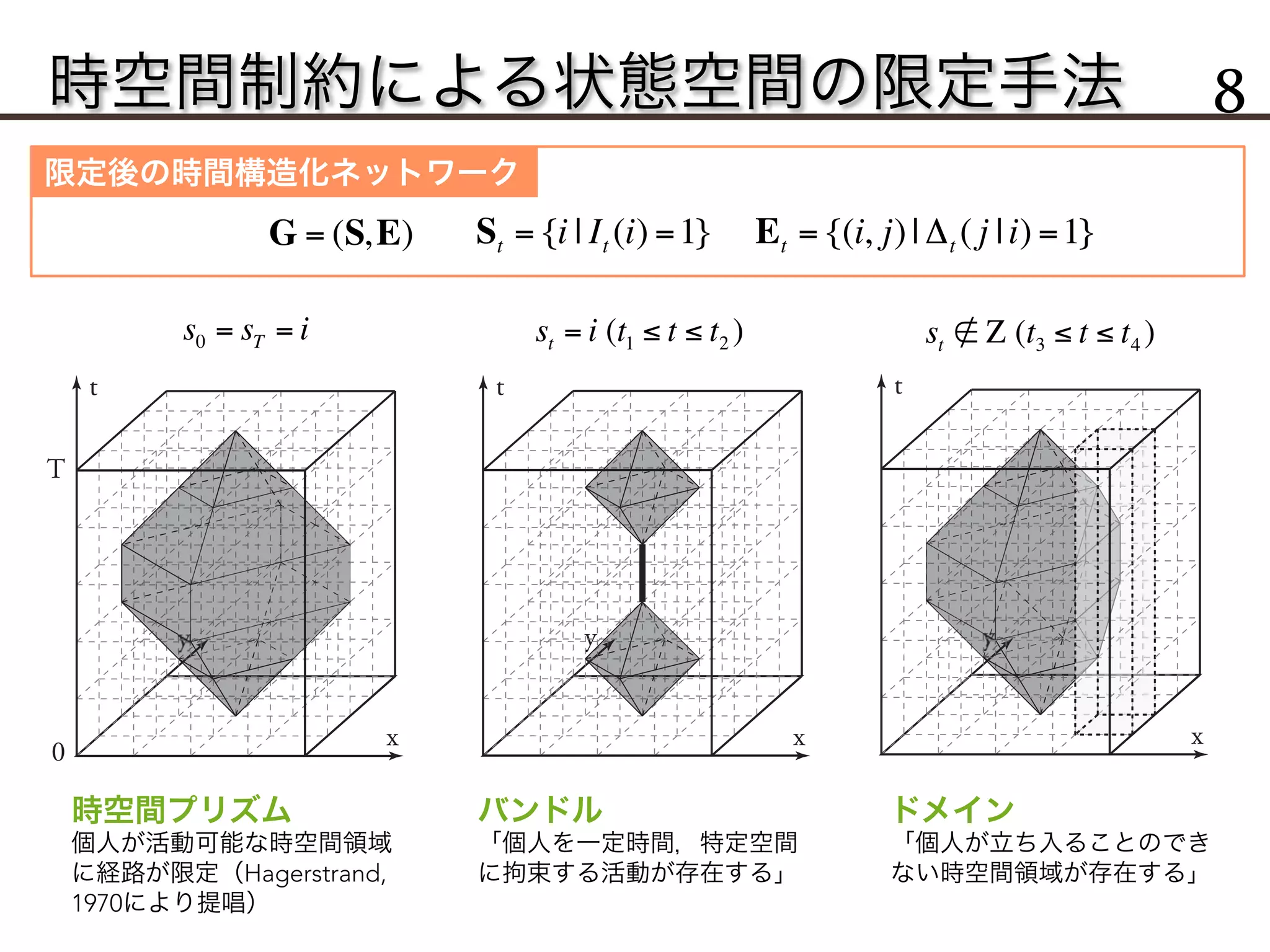
時空間制約による状態空間の限定手法 8
yy
x
t
x
t
T
0
x
t
St ={i | It (i) =1} Et = {(i, j)| Δt ( j |i) =1}
時空間プリズム
個人が活動可能な時空間領域
に経路が限定(Hagerstrand,
1970により提唱)
バンドル
「個人を一定時間,特定空間
に拘束する活動が存在する」
ドメイン
「個人が立ち入ることのでき
ない時空間領域が存在する」
G = (S,E)
s0 = sT = i st = i (t1 ≤ t ≤ t2 ) st ∉ Ζ (t3 ≤ t ≤ t4 )
限定後の時間構造化ネットワーク
11.
活動経路選択モデル 9
Pk =Pr uk = max
k'∈C
uk'( ) k :活動経路選択肢
C :選択肢集合uk :活動経路 k のランダム効用
活動経路選択モデル
1
3
2
1
3
2
o
d
[1,1,1,1],[1,1,2,1],[1,1,3,1]
[1,2,1,1],[1,2,2,1],[1,2,3,1]
[1,3,1,1],[1,3,2,1],[1,3,3,1]
Pk :活動経路 k の選択確率
個人が最も効用の高い活動経路を確率的に選択する
t = 0
t = T
[1,1,1],[1,2,1],[1,3,1]
T = 2のとき
C = 3
C = 9
T = 3のとき
T = n のとき C = 3n−1
列挙不可能
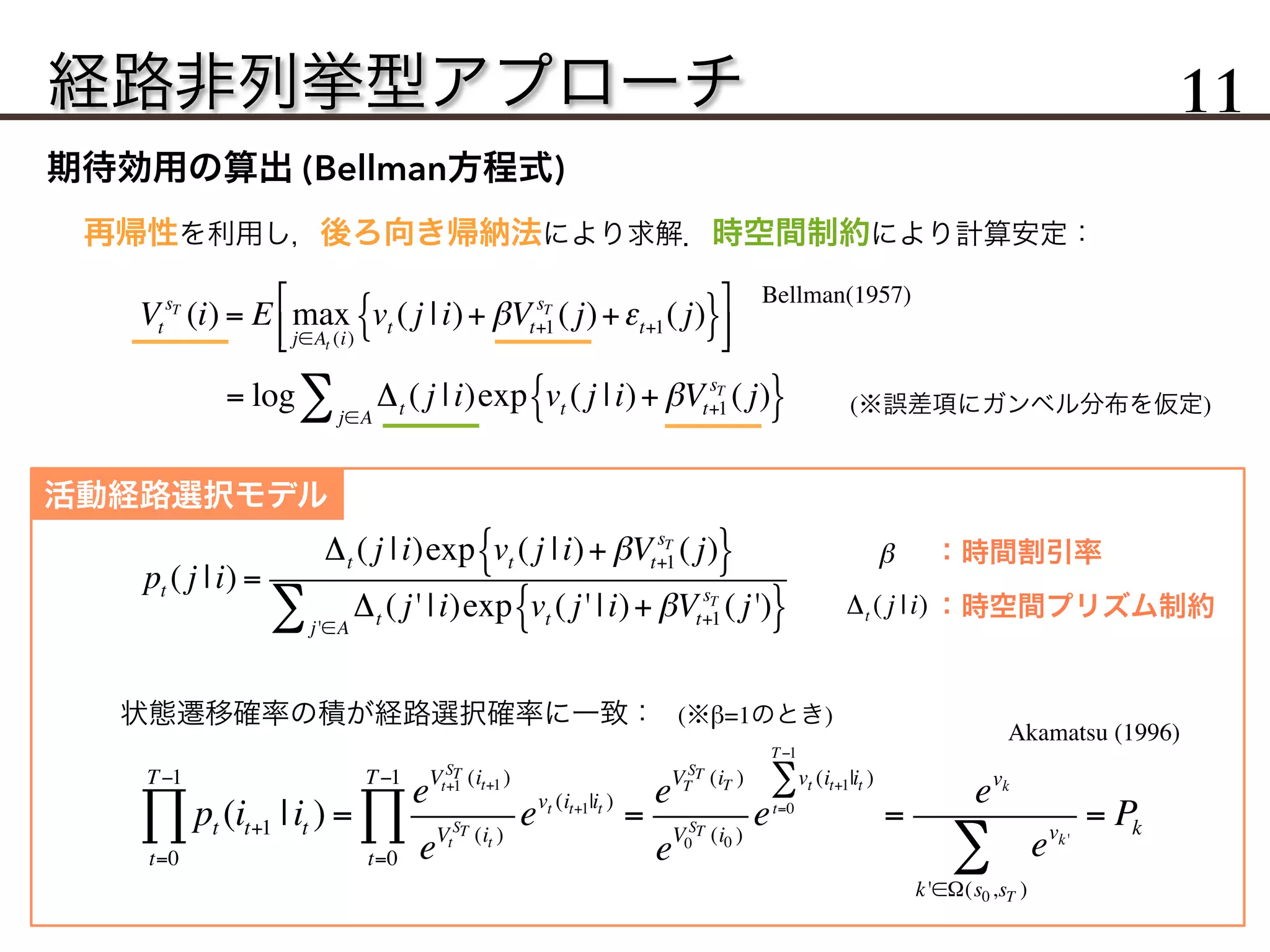
経路非列挙型アプローチ
12.
経路非列挙型アプローチ 10
yy
?
yy
t
x
逐次的な状態遷移をモデル化
pt (j |i) = Pr ut ( j |i) = max
j∈At (i)
ut ( j |i)( )
時点tに状態iからjへ遷移する確率:
pt ( j |i)
P(k =[s0,...,sT ]) = pt (st+1 | st )
t=0
T−1
∏
活動経路 の選択確率は状態遷移確率の積:k
yy
?
yy
t
xx
Vt+1
sT
( j)
vt ( j |i)
ut ( j |i) = vt ( j |i)+ βVt+1
sT
( j)+εt+1( j)
vt ( j |i) :アーク の一次効用(st,st+1)
Vt
sT
( j) :状態 の将来期待効用st = j
接続空間の効用と期待効用との和を最大化:
β :将来期待効用の割引率
動的な意思決定
マイオピック
な判断
(0 ≤ β ≤1) ft (xj|i,θ)
![時間構造化ネットワーク 6
G = (N, A)
i, j ∈ N
:ノード
(i, j) ∈ A
:リンク
G = (S,E)
S =[S0,...,St,...,ST ]
E =[E0,..., Et,..., ET−1]
移動空間ネットワーク 時間構造化ネットワーク
1 2 3 4 5
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
21 22 23 24 25
y
x
: Node : Link
y
Space
x
t t
Time t=1
t=0
t=2
t=3
t=4
t=5
move
from 8 to 9
from 9 to 14
at 14
from 13 to 8
move
from 14 to 13
move
move
stay
ψ =[8,9,14,13,8] ψ =[(0,8),(1,9),(2,14),(3,14),(4,13),(5,8)]
st = (t,i) ∈ St
et = (st,st+1) ∈ Et
:状態ノード
:状態アーク
移動経路:
xy平面・t軸への射影により,移動経路・スケジューリングが同時評価可能
膨大な状態量と組み合わせ爆発
δ( j |i)
:接続条件
活動経路:](https://image.slidesharecdn.com/cpij51pptoyama-191113091550/75/slide-8-2048.jpg)
![活動経路選択モデル 9
Pk = Pr uk = max
k'∈C
uk'( ) k :活動経路選択肢
C :選択肢集合uk :活動経路 k のランダム効用
活動経路選択モデル
1
3
2
1
3
2
o
d
[1,1,1,1],[1,1,2,1],[1,1,3,1]
[1,2,1,1],[1,2,2,1],[1,2,3,1]
[1,3,1,1],[1,3,2,1],[1,3,3,1]
Pk :活動経路 k の選択確率
個人が最も効用の高い活動経路を確率的に選択する
t = 0
t = T
[1,1,1],[1,2,1],[1,3,1]
T = 2のとき
C = 3
C = 9
T = 3のとき
T = n のとき C = 3n−1
列挙不可能
経路非列挙型アプローチ](https://image.slidesharecdn.com/cpij51pptoyama-191113091550/75/slide-11-2048.jpg)
![経路非列挙型アプローチ 10
yy
?
yy
t
x
逐次的な状態遷移をモデル化
pt ( j |i) = Pr ut ( j |i) = max
j∈At (i)
ut ( j |i)( )
時点tに状態iからjへ遷移する確率:
pt ( j |i)
P(k =[s0,...,sT ]) = pt (st+1 | st )
t=0
T−1
∏
活動経路 の選択確率は状態遷移確率の積:k
yy
?
yy
t
xx
Vt+1
sT
( j)
vt ( j |i)
ut ( j |i) = vt ( j |i)+ βVt+1
sT
( j)+εt+1( j)
vt ( j |i) :アーク の一次効用(st,st+1)
Vt
sT
( j) :状態 の将来期待効用st = j
接続空間の効用と期待効用との和を最大化:
β :将来期待効用の割引率
動的な意思決定
マイオピック
な判断
(0 ≤ β ≤1) ft (xj|i,θ)](https://image.slidesharecdn.com/cpij51pptoyama-191113091550/75/slide-12-2048.jpg)
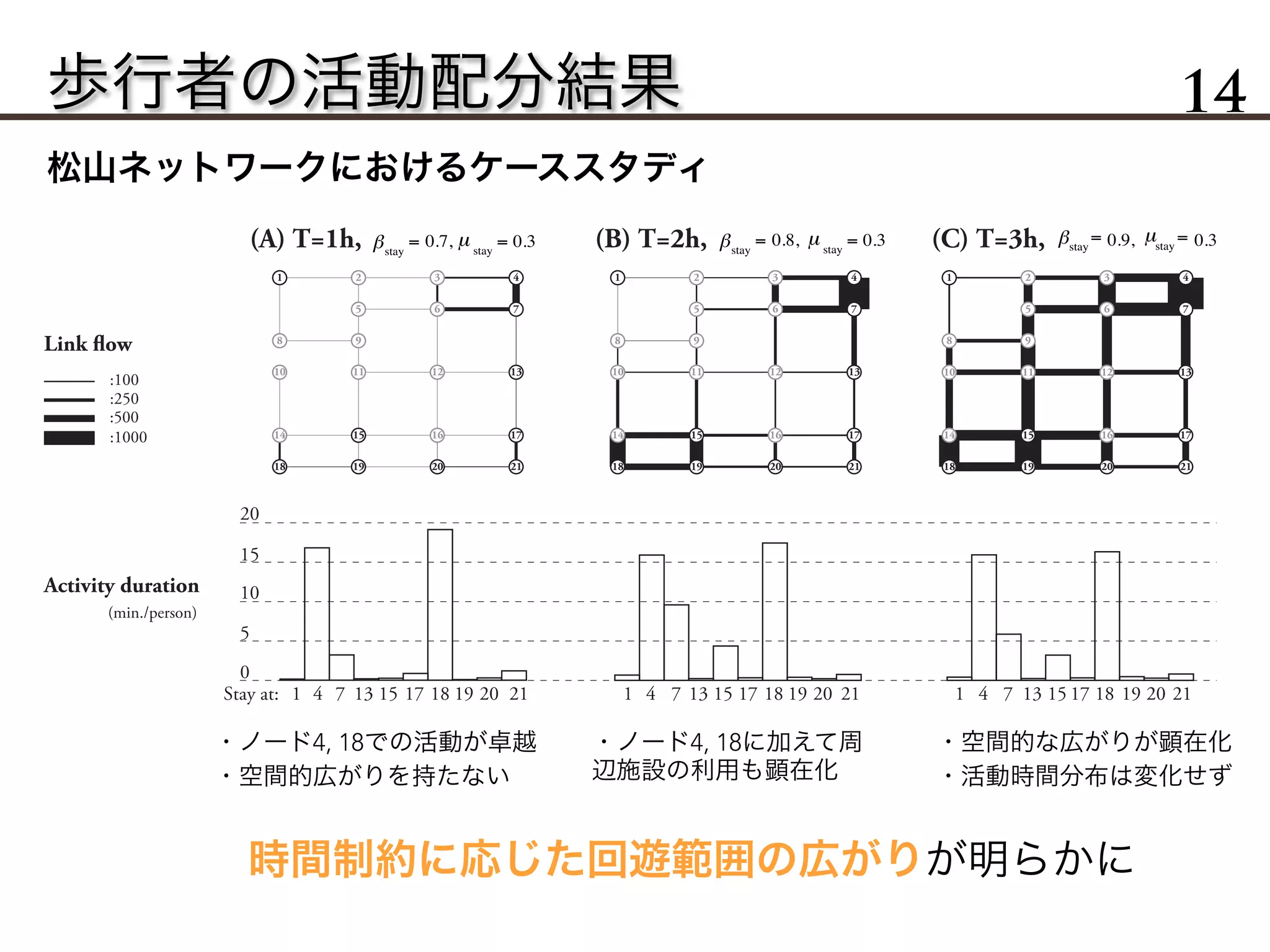
![歩行者の活動配分結果 12
シンプルネットワークにおける試算
• 移動経路-目的地-活動時間の選択
を一体的なパスとして出力
• リンク交通量+ノード滞在時間を
同時評価
• 時間割引率βにより回遊意識の違
いを表現
a1
o
a1
a1
a1
o
a2
a3
a2
a3
a2
a3
a3a2
a2
a3a1
o
o
o
o
a1 a2
a3
a1 a2 a3
a1 a2 a3
a1 a2 a3
Most frequent Assignment ( linkflow / #Activity )
299
966
1947
750
6
1362
164
683633
1497 46
8541
27
1016 292
40986
14
1342 1105
161660
15
568
1000
a1
a1
a1
a2
a2
a2
a3
a3
a3
a1
o
a3
a3
a1
a2
a3o
o
o
o
a2
o a2
a3
a1
a3
a1 a2
a3
a2
a2
a1
a1
481
1000
a2
o
a2
a2
a2
a1 a3o
o
o
o
a1 a3
o a1 a3
a1
a1 a2
a3
a1 a2
a3
a3
409
1000
=
0
=
1
=
0.5
a1
a2
a3o
*( ca
) : 移動効用
**[ba
, ca
] : 滞在効用
**
*
(-1)
[5,-1]
[9,-2]
[12,0]
(-2)
(-2)
(-3)
(-3)
設定:遠い施設の滞在効用が高い](https://image.slidesharecdn.com/cpij51pptoyama-191113091550/75/slide-14-2048.jpg)
![歩行者の活動配分結果 13
松山まちなかネットワークにおけるケーススタディ
いよてつ高島屋 銀天街
大街道
三越
堀之内公園
1 2 3 4
5 6 7
8 9
10 11 12 13
14 15 16 17
18 19 20 21
1o
[2.4, 0.1]
[3.0, 0.25]
[1.8, 0.1]
[1.8, 0.2]
[1.8, 0.2]
[2.4, 0.4]
N = 100
N = 300
N = 200
N = 400
[1.8, 0.1]
[3.0, 0.25]
[1.8, 0.2] [1.8, 0.2]
3o
4o
2o
n
Legend
: 滞在可能ノード
: parameter
n : 通過ノード
o : 始点 / 終点
[b, c]
: 出発者数N
100mN
• 2核1モール型のL字商業空間
• 唯一で最大の公園は商店街の
対角に位置](https://image.slidesharecdn.com/cpij51pptoyama-191113091550/75/slide-15-2048.jpg)



![[DL輪読会] マルチエージェント強化学習と心の理論](https://cdn.slidesharecdn.com/ss_thumbnails/0917imai-211210044729-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Deep Learning 第2章 線形代数](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearningchapter2-180601014406-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)