Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Takahiro Miyaura
2,253 views
Spatial Mappingの設定が気になる
Mixed Reality Toolkit - UnityのSpatialMappingのいくつかの設定パラメータの違いや効果を調べていなかったので調査した内容です。
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
1
/ 15
2
/ 15
3
/ 15
4
/ 15
5
/ 15
6
/ 15
7
/ 15
8
/ 15
9
/ 15
10
/ 15
11
/ 15
12
/ 15
13
/ 15
14
/ 15
15
/ 15
More Related Content
PPTX
久しぶりにMicrosoft Meshを使ってみた - 色々変わってたよ編 -
by
Takahiro Miyaura
PPTX
UIデザイン設計から開発をつなぐ「MRTK Figma Bridge for Unity」を使ってみよう
by
Takahiro Miyaura
PPTX
World Locking Toolについて
by
Takahiro Miyaura
PPTX
OpenXR + XR Interaction Toolkit使ったHoloLensコンテンツ開発検証 ~ (私が)完全に理解できたらちゃんと作れて、いろ...
by
Takahiro Miyaura
PPTX
5分でわからんXR
by
Takahiro Miyaura
PPTX
Unityは知ってる開発者が UE4 で HoloLens 2 アプリ開発セションを聞くために知っておくといいかもTips
by
Takahiro Miyaura
PPTX
Way-Findingをやってやった ~ Azure Spatial Anchorsでね~
by
Takahiro Miyaura
PPTX
Azure Spatial Anchorsのユースケース「Way-Finding」を実現するためのテクニック
by
Takahiro Miyaura
久しぶりにMicrosoft Meshを使ってみた - 色々変わってたよ編 -
by
Takahiro Miyaura
UIデザイン設計から開発をつなぐ「MRTK Figma Bridge for Unity」を使ってみよう
by
Takahiro Miyaura
World Locking Toolについて
by
Takahiro Miyaura
OpenXR + XR Interaction Toolkit使ったHoloLensコンテンツ開発検証 ~ (私が)完全に理解できたらちゃんと作れて、いろ...
by
Takahiro Miyaura
5分でわからんXR
by
Takahiro Miyaura
Unityは知ってる開発者が UE4 で HoloLens 2 アプリ開発セションを聞くために知っておくといいかもTips
by
Takahiro Miyaura
Way-Findingをやってやった ~ Azure Spatial Anchorsでね~
by
Takahiro Miyaura
Azure Spatial Anchorsのユースケース「Way-Finding」を実現するためのテクニック
by
Takahiro Miyaura
What's hot
PPTX
クロスプラットフォーム開発としての「Mixed Reality Toolkit V2」が持つ可能性
by
Takahiro Miyaura
PPTX
だんグラで「Mixed Reality Toolkit V2」のサンプルを動かしてみた
by
Takahiro Miyaura
PPTX
Unreal Engine でアプリ開発~ MRTK UXTools for Unreal V0.9.0 ~
by
Takahiro Miyaura
PPTX
HoloLens 2 TutorialをMobileARで動かす
by
Takahiro Miyaura
PPTX
Mixed Reality Feature ToolとMixed Reality Toolkit V2.6.1
by
Takahiro Miyaura
PPTX
Azure Remote Renderingを試す
by
Takahiro Miyaura
PPTX
MRTKと戯れ続けると面白い事が多かった話
by
Takahiro Miyaura
PPTX
「あれ」がスマホで動くのか試してみた
by
Takahiro Miyaura
PPTX
Oculus Quest 2 on Mixed Reality Toolkit V2.5.0~ ハンドトラッキングする方法 ~
by
Takahiro Miyaura
PPTX
World Locking Toolsについて調べている話(2020/04/22)
by
Takahiro Miyaura
PPTX
Azure Object Anchors Recap(Kobe版)
by
Takahiro Miyaura
PPTX
MR用にログ出力部品を作り始めました。
by
Takahiro Miyaura
PPTX
HoloLensでCustom Vision Serviceを使ったオフライン推論を試した話
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit V2.2.0のMobile対応について
by
Takahiro Miyaura
PPTX
IoT関連のAzureを使い倒して お部屋の空気観測装置を作った話
by
Takahiro Miyaura
PPTX
MRTK V2のHand MenuをHoloLens1でつかう方法
by
Takahiro Miyaura
PPTX
今改めて見る Plane finding
by
Takahiro Miyaura
PPTX
HoloLens 1のアプリをHoloLens 2に移行する
by
Takahiro Miyaura
PPTX
HoloLens/Windows Mixed Reality Deviceについて~XR技術についての基本~
by
Takahiro Miyaura
PPTX
Scrolling CollectionsとElastic System(Mixed Reality Toolkit V2.5.1)
by
Takahiro Miyaura
クロスプラットフォーム開発としての「Mixed Reality Toolkit V2」が持つ可能性
by
Takahiro Miyaura
だんグラで「Mixed Reality Toolkit V2」のサンプルを動かしてみた
by
Takahiro Miyaura
Unreal Engine でアプリ開発~ MRTK UXTools for Unreal V0.9.0 ~
by
Takahiro Miyaura
HoloLens 2 TutorialをMobileARで動かす
by
Takahiro Miyaura
Mixed Reality Feature ToolとMixed Reality Toolkit V2.6.1
by
Takahiro Miyaura
Azure Remote Renderingを試す
by
Takahiro Miyaura
MRTKと戯れ続けると面白い事が多かった話
by
Takahiro Miyaura
「あれ」がスマホで動くのか試してみた
by
Takahiro Miyaura
Oculus Quest 2 on Mixed Reality Toolkit V2.5.0~ ハンドトラッキングする方法 ~
by
Takahiro Miyaura
World Locking Toolsについて調べている話(2020/04/22)
by
Takahiro Miyaura
Azure Object Anchors Recap(Kobe版)
by
Takahiro Miyaura
MR用にログ出力部品を作り始めました。
by
Takahiro Miyaura
HoloLensでCustom Vision Serviceを使ったオフライン推論を試した話
by
Takahiro Miyaura
Mixed Reality Toolkit V2.2.0のMobile対応について
by
Takahiro Miyaura
IoT関連のAzureを使い倒して お部屋の空気観測装置を作った話
by
Takahiro Miyaura
MRTK V2のHand MenuをHoloLens1でつかう方法
by
Takahiro Miyaura
今改めて見る Plane finding
by
Takahiro Miyaura
HoloLens 1のアプリをHoloLens 2に移行する
by
Takahiro Miyaura
HoloLens/Windows Mixed Reality Deviceについて~XR技術についての基本~
by
Takahiro Miyaura
Scrolling CollectionsとElastic System(Mixed Reality Toolkit V2.5.1)
by
Takahiro Miyaura
Similar to Spatial Mappingの設定が気になる
PPTX
「Mixed Reality Toolkit V1」のあの機能ってV2では?~ 空間マッピングとTagalong ~
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit V2におけるマルチデバイス対応 ~ Azure Spatial Anchorsとphotonによるシェアリング...
by
Takahiro Miyaura
PPTX
Azure Spatial Anchorについて少し調べた話
by
Takahiro Miyaura
PPTX
Spatial Copy & Paste @HoloLensゆるっとLT会
by
Takashi Yoshinaga
PPTX
第7回 HoloLens参考書読書会 @アカツキ Ch8. Sharingのはなし
by
daisuke yamanaka
PPTX
Mixed Reality関連のSDKの状況を調べてみた
by
Takahiro Miyaura
PPTX
World Locking Tools でAzure Spatial Anchorsが使えるようになった
by
Takahiro Miyaura
PDF
Japan VR Fest 開発者会 in cluster
by
WheetTweet
PPTX
Mixed Reality ToolkitでHoloとImmersiveまとめて開発
by
Takahiro Miyaura
「Mixed Reality Toolkit V1」のあの機能ってV2では?~ 空間マッピングとTagalong ~
by
Takahiro Miyaura
Mixed Reality Toolkit V2におけるマルチデバイス対応 ~ Azure Spatial Anchorsとphotonによるシェアリング...
by
Takahiro Miyaura
Azure Spatial Anchorについて少し調べた話
by
Takahiro Miyaura
Spatial Copy & Paste @HoloLensゆるっとLT会
by
Takashi Yoshinaga
第7回 HoloLens参考書読書会 @アカツキ Ch8. Sharingのはなし
by
daisuke yamanaka
Mixed Reality関連のSDKの状況を調べてみた
by
Takahiro Miyaura
World Locking Tools でAzure Spatial Anchorsが使えるようになった
by
Takahiro Miyaura
Japan VR Fest 開発者会 in cluster
by
WheetTweet
Mixed Reality ToolkitでHoloとImmersiveまとめて開発
by
Takahiro Miyaura
More from Takahiro Miyaura
PPTX
Azure Digital TwinとUnreal Engineを統合するADTLink Pluginについて
by
Takahiro Miyaura
PPTX
Mixed RealityとAzure Digital Twinsを組合わせてデジタルツインを可視化するためのTips
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit 3 Recap
by
Takahiro Miyaura
PPTX
Azure Object Anchors のQuick Startで理解を深めたい
by
Takahiro Miyaura
PPTX
MRTK3を調べてみた
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit 3 のチュートリアル「Zappy’s Playground」のUXをみる
by
Takahiro Miyaura
PPTX
HoloLensでコンテンツを操作する方法 - Gaze And Dwell -
by
Takahiro Miyaura
PPTX
【続】OpenXRでHoloLensアプリを作る
by
Takahiro Miyaura
PPTX
Azure Object Anchors Recap
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit で OpenXRのEye Trackingを使う
by
Takahiro Miyaura
PPTX
OpenVRやOpenXRの基本的なことを調べてみた
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit 3 のチュートリアル「Zappy’s Playground」の紹介
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit 3 - 「MRTK XR Rig」と「Bounds Control」
by
Takahiro Miyaura
PPTX
ラーニングパス「Azure Digital Twins と Unity を使用して Mixed Reality デジタル ツインを構築する」にAzure ...
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit V3について
by
Takahiro Miyaura
PPTX
Build 2021のDigital Twinsセションを読み解く ~Azure関連サービス概要とラーニングパスの詳説~
by
Takahiro Miyaura
PPTX
HoloLens1アプリをHoloLens2アプリに変換できるかチャレンジ
by
Takahiro Miyaura
PPTX
Microsoft Ignite 2022の情報 & Microsoft Learnの整理をしてみた
by
Takahiro Miyaura
PPTX
Mixed Reality Toolkit 3 の更新状況 - 6月からもちょいちょいアップデートされてるよ
by
Takahiro Miyaura
PPTX
5周年ふりかえり!HoloLens 1とHoloLens 2のUI操作と実装の違いを改めて見てみよう
by
Takahiro Miyaura
Azure Digital TwinとUnreal Engineを統合するADTLink Pluginについて
by
Takahiro Miyaura
Mixed RealityとAzure Digital Twinsを組合わせてデジタルツインを可視化するためのTips
by
Takahiro Miyaura
Mixed Reality Toolkit 3 Recap
by
Takahiro Miyaura
Azure Object Anchors のQuick Startで理解を深めたい
by
Takahiro Miyaura
MRTK3を調べてみた
by
Takahiro Miyaura
Mixed Reality Toolkit 3 のチュートリアル「Zappy’s Playground」のUXをみる
by
Takahiro Miyaura
HoloLensでコンテンツを操作する方法 - Gaze And Dwell -
by
Takahiro Miyaura
【続】OpenXRでHoloLensアプリを作る
by
Takahiro Miyaura
Azure Object Anchors Recap
by
Takahiro Miyaura
Mixed Reality Toolkit で OpenXRのEye Trackingを使う
by
Takahiro Miyaura
OpenVRやOpenXRの基本的なことを調べてみた
by
Takahiro Miyaura
Mixed Reality Toolkit 3 のチュートリアル「Zappy’s Playground」の紹介
by
Takahiro Miyaura
Mixed Reality Toolkit 3 - 「MRTK XR Rig」と「Bounds Control」
by
Takahiro Miyaura
ラーニングパス「Azure Digital Twins と Unity を使用して Mixed Reality デジタル ツインを構築する」にAzure ...
by
Takahiro Miyaura
Mixed Reality Toolkit V3について
by
Takahiro Miyaura
Build 2021のDigital Twinsセションを読み解く ~Azure関連サービス概要とラーニングパスの詳説~
by
Takahiro Miyaura
HoloLens1アプリをHoloLens2アプリに変換できるかチャレンジ
by
Takahiro Miyaura
Microsoft Ignite 2022の情報 & Microsoft Learnの整理をしてみた
by
Takahiro Miyaura
Mixed Reality Toolkit 3 の更新状況 - 6月からもちょいちょいアップデートされてるよ
by
Takahiro Miyaura
5周年ふりかえり!HoloLens 1とHoloLens 2のUI操作と実装の違いを改めて見てみよう
by
Takahiro Miyaura
Recently uploaded
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):コアマイクロシステムズ株式会社 テーマ 「AI HPC時代のトータルソリューションプロバイダ」
by
PC Cluster Consortium
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):日本ヒューレット・パッカード合同会社 テーマ1「大規模AIの能力を最大限に活用するHPE Comp...
by
PC Cluster Consortium
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):Pacific Teck Japan テーマ3「『TrinityX』 AI時代のクラスターマネジメ...
by
PC Cluster Consortium
PDF
論文紹介:DiffusionRet: Generative Text-Video Retrieval with Diffusion Model
by
Toru Tamaki
PDF
論文紹介:HiLoRA: Adaptive Hierarchical LoRA Routing for Training-Free Domain Gene...
by
Toru Tamaki
PDF
論文紹介:MotionMatcher: Cinematic Motion Customizationof Text-to-Video Diffusion ...
by
Toru Tamaki
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):Pacific Teck Japan テーマ2「『Slinky』 SlurmとクラウドのKuber...
by
PC Cluster Consortium
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):エヌビディア合同会社 テーマ1「NVIDIA 最新発表製品等のご案内」
by
PC Cluster Consortium
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):日本ヒューレット・パッカード合同会社 テーマ3「IT運用とデータサイエンティストを強力に支援するH...
by
PC Cluster Consortium
PDF
AI開発の最前線を変えるニューラルネットワークプロセッサと、未来社会における応用可能性
by
Data Source
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):富士通株式会社 テーマ1「HPC&AI: Accelerating material develo...
by
PC Cluster Consortium
PPTX
ChatGPTのコネクタ開発から学ぶ、外部サービスをつなぐMCPサーバーの仕組み
by
Ryuji Egashira
PDF
膨大なデータ時代を制する鍵、セグメンテーションAIが切り拓く解析精度と効率の革新
by
Data Source
PDF
ニューラルプロセッサによるAI処理の高速化と、未知の可能性を切り拓く未来の人工知能
by
Data Source
PPTX
2025年11月24日情報ネットワーク法学会大井哲也発表「API利用のシステム情報」
by
Tetsuya Oi
PCCC25(設立25年記念PCクラスタシンポジウム):コアマイクロシステムズ株式会社 テーマ 「AI HPC時代のトータルソリューションプロバイダ」
by
PC Cluster Consortium
PCCC25(設立25年記念PCクラスタシンポジウム):日本ヒューレット・パッカード合同会社 テーマ1「大規模AIの能力を最大限に活用するHPE Comp...
by
PC Cluster Consortium
PCCC25(設立25年記念PCクラスタシンポジウム):Pacific Teck Japan テーマ3「『TrinityX』 AI時代のクラスターマネジメ...
by
PC Cluster Consortium
論文紹介:DiffusionRet: Generative Text-Video Retrieval with Diffusion Model
by
Toru Tamaki
論文紹介:HiLoRA: Adaptive Hierarchical LoRA Routing for Training-Free Domain Gene...
by
Toru Tamaki
論文紹介:MotionMatcher: Cinematic Motion Customizationof Text-to-Video Diffusion ...
by
Toru Tamaki
PCCC25(設立25年記念PCクラスタシンポジウム):Pacific Teck Japan テーマ2「『Slinky』 SlurmとクラウドのKuber...
by
PC Cluster Consortium
PCCC25(設立25年記念PCクラスタシンポジウム):エヌビディア合同会社 テーマ1「NVIDIA 最新発表製品等のご案内」
by
PC Cluster Consortium
PCCC25(設立25年記念PCクラスタシンポジウム):日本ヒューレット・パッカード合同会社 テーマ3「IT運用とデータサイエンティストを強力に支援するH...
by
PC Cluster Consortium
AI開発の最前線を変えるニューラルネットワークプロセッサと、未来社会における応用可能性
by
Data Source
PCCC25(設立25年記念PCクラスタシンポジウム):富士通株式会社 テーマ1「HPC&AI: Accelerating material develo...
by
PC Cluster Consortium
ChatGPTのコネクタ開発から学ぶ、外部サービスをつなぐMCPサーバーの仕組み
by
Ryuji Egashira
膨大なデータ時代を制する鍵、セグメンテーションAIが切り拓く解析精度と効率の革新
by
Data Source
ニューラルプロセッサによるAI処理の高速化と、未知の可能性を切り拓く未来の人工知能
by
Data Source
2025年11月24日情報ネットワーク法学会大井哲也発表「API利用のシステム情報」
by
Tetsuya Oi
Spatial Mappingの設定が気になる
1.
Spatial Mappingの 設定が気になる Miyaura –
大阪駆動開発 2018/09/26
2.
こんな人が話します Miyaura Takahiro(@takabrz1) ◦ 某会社のシステムエンジニア ◦
コミュニティ: 大阪駆動開発 ◦HoloLens含むXR技術は趣味! ◦Microsoft MVP for Windows Development(2018-2019) ◦https://qiita.com/miyauraでMixed Reality開発Tips公開中!
3.
今日のお題 Mixed Reality Toolkitの Spatial
Mappingの設定に 何か意味があるのか?
4.
Mixed Reality Toolkit(通称MRTK)とは? HoloLensやWindows
Mixed Reality Deviceで使える便利なライ ブラリ 現在開発中のvNEXTでは上記のデバイス以外にもOculusや Open XR等より多くのXRデバイスでの活用を目指している。
5.
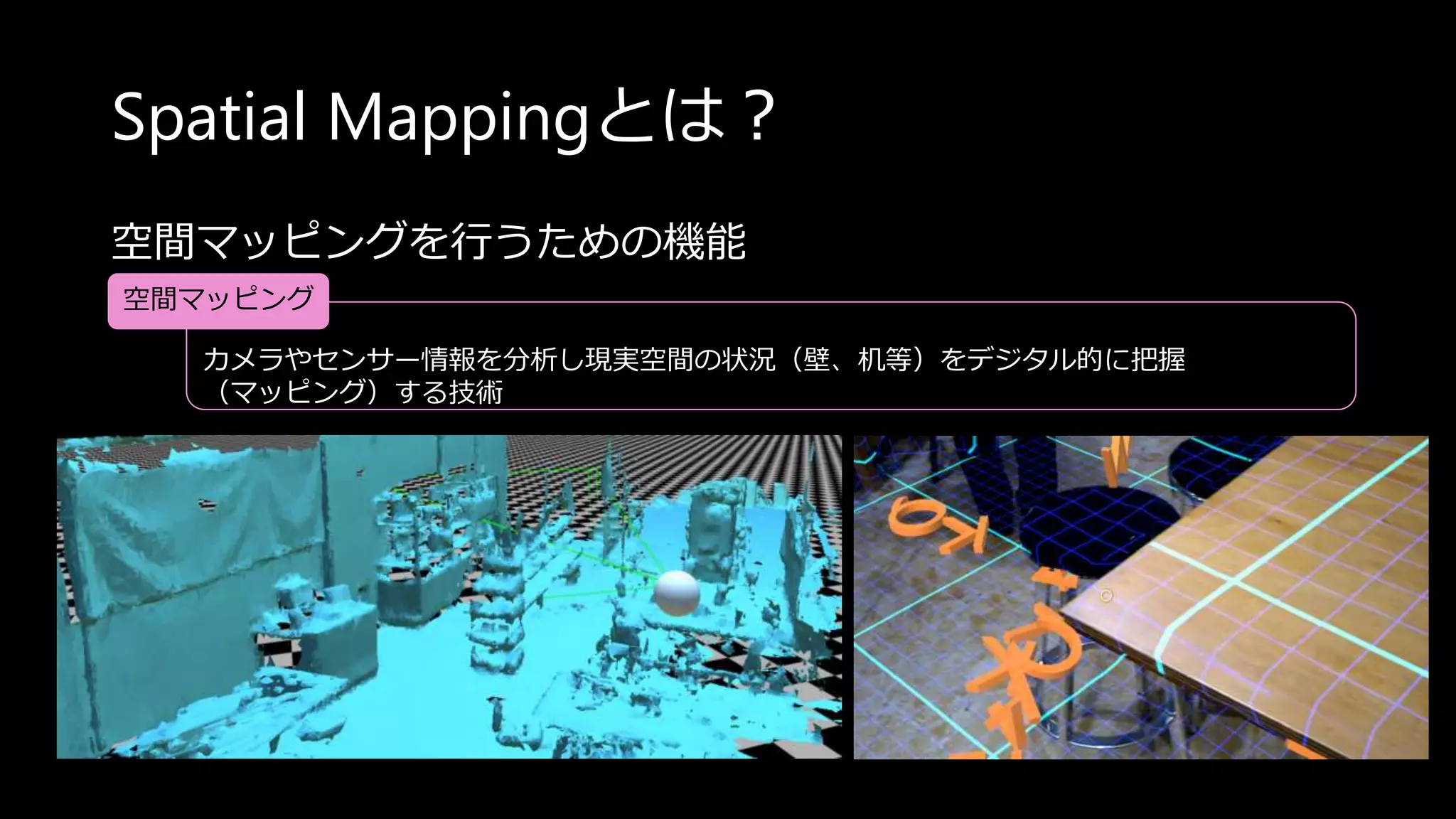
Spatial Mappingとは? カメラやセンサー情報を分析し現実空間の状況(壁、机等)をデジタル的に把握 (マッピング)する技術 空間マッピング 空間マッピングを行うための機能
6.
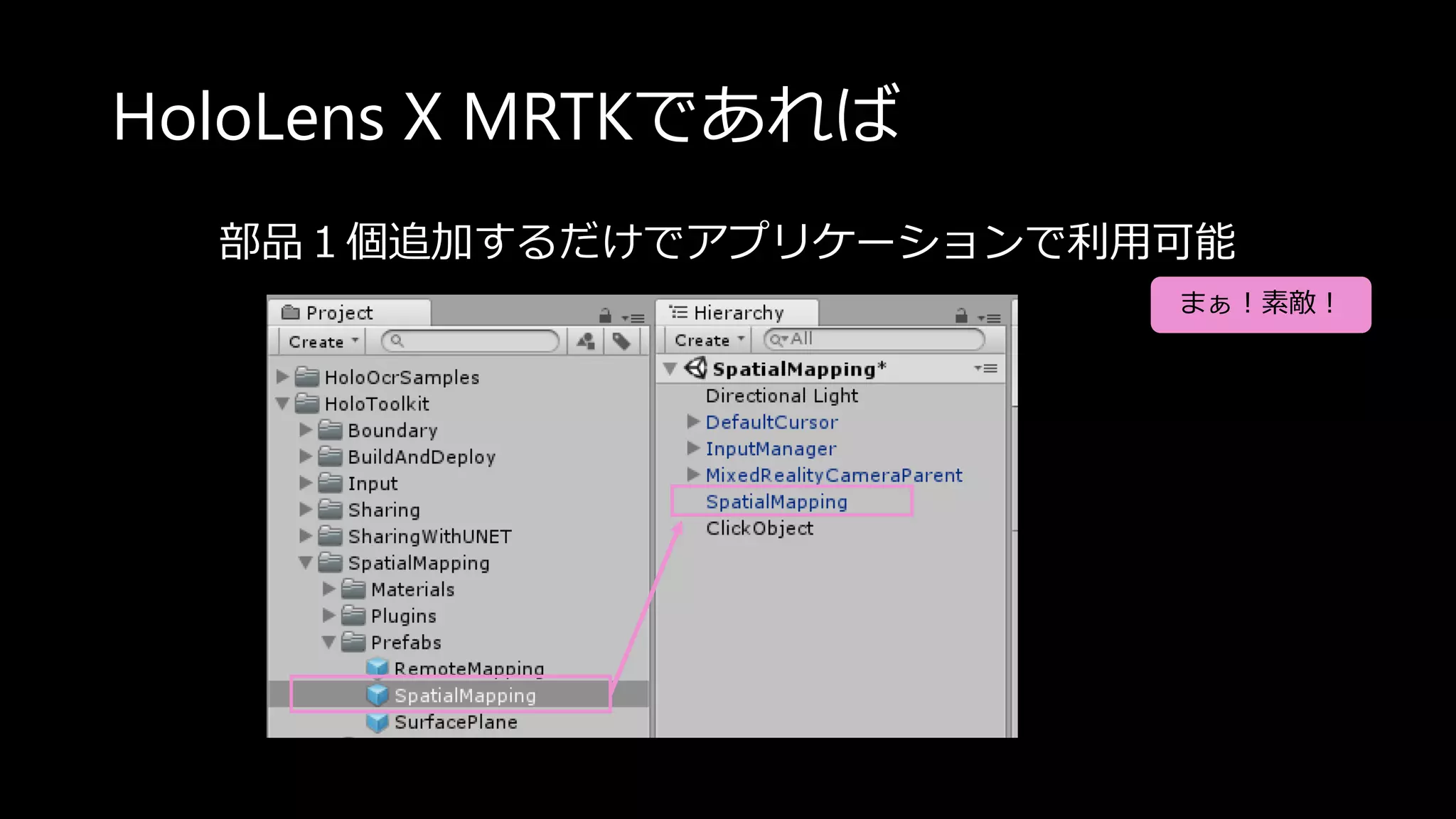
HoloLens X MRTKであれば 部品1個追加するだけでアプリケーションで利用可能 まぁ!素敵!
7.
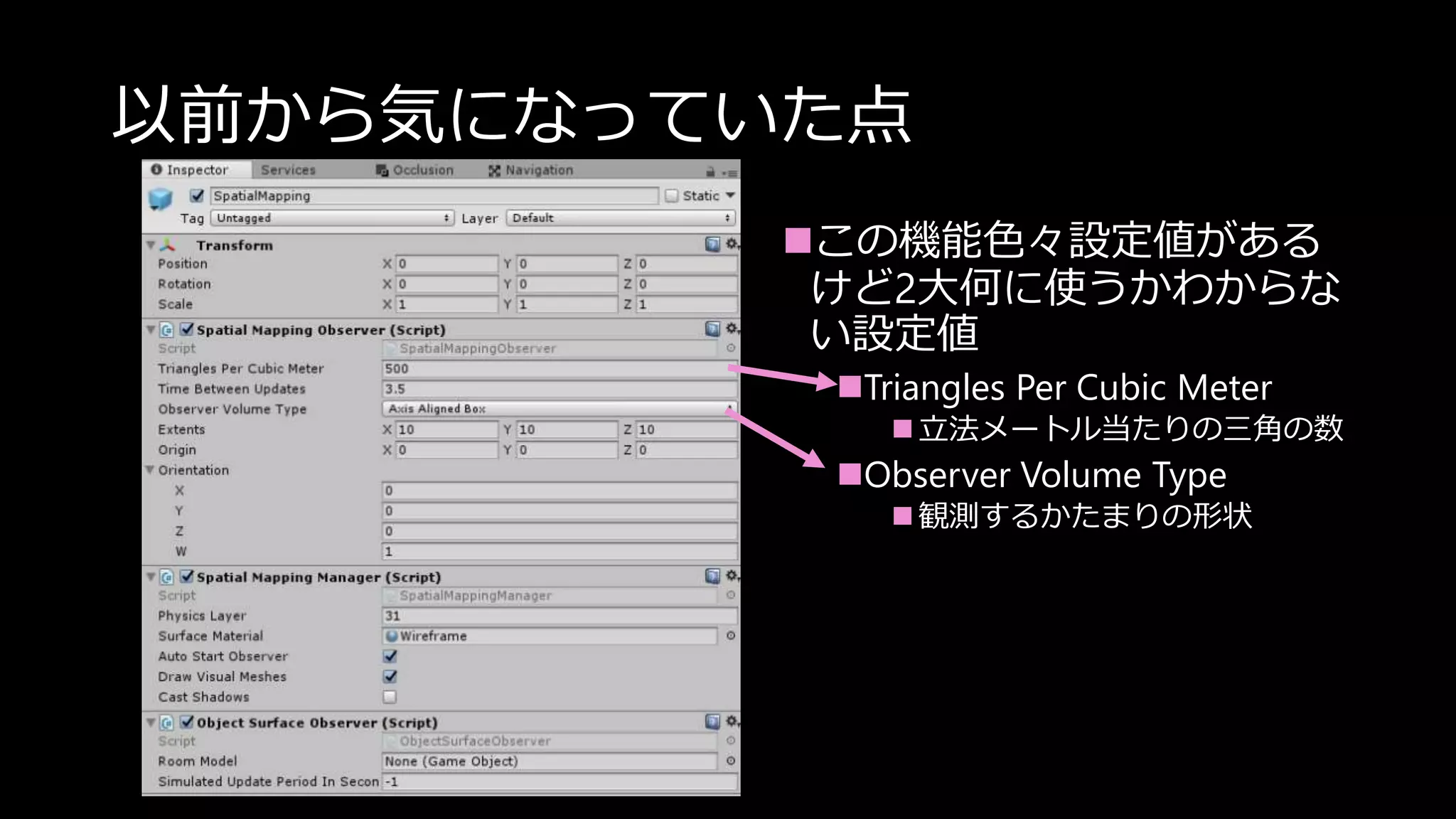
以前から気になっていた点 この機能色々設定値がある けど2大何に使うかわからな い設定値 Triangles Per Cubic
Meter 立法メートル当たりの三角の数 Observer Volume Type 観測するかたまりの形状
8.
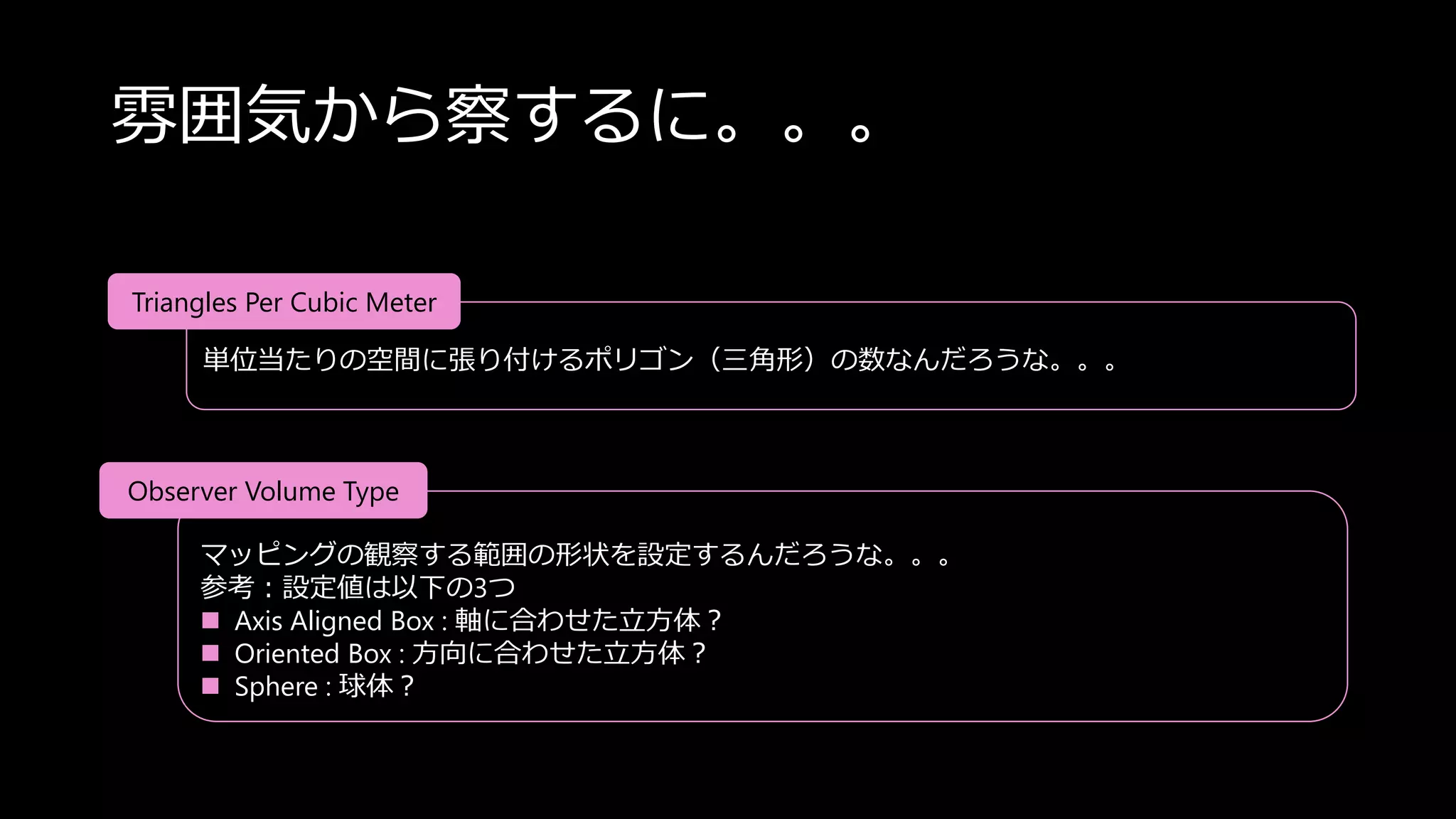
雰囲気から察するに。。。 単位当たりの空間に張り付けるポリゴン(三角形)の数なんだろうな。。。 Triangles Per Cubic
Meter マッピングの観察する範囲の形状を設定するんだろうな。。。 参考:設定値は以下の3つ Axis Aligned Box : 軸に合わせた立方体? Oriented Box : 方向に合わせた立方体? Sphere : 球体? Observer Volume Type
9.
ということでやってみる。
10.
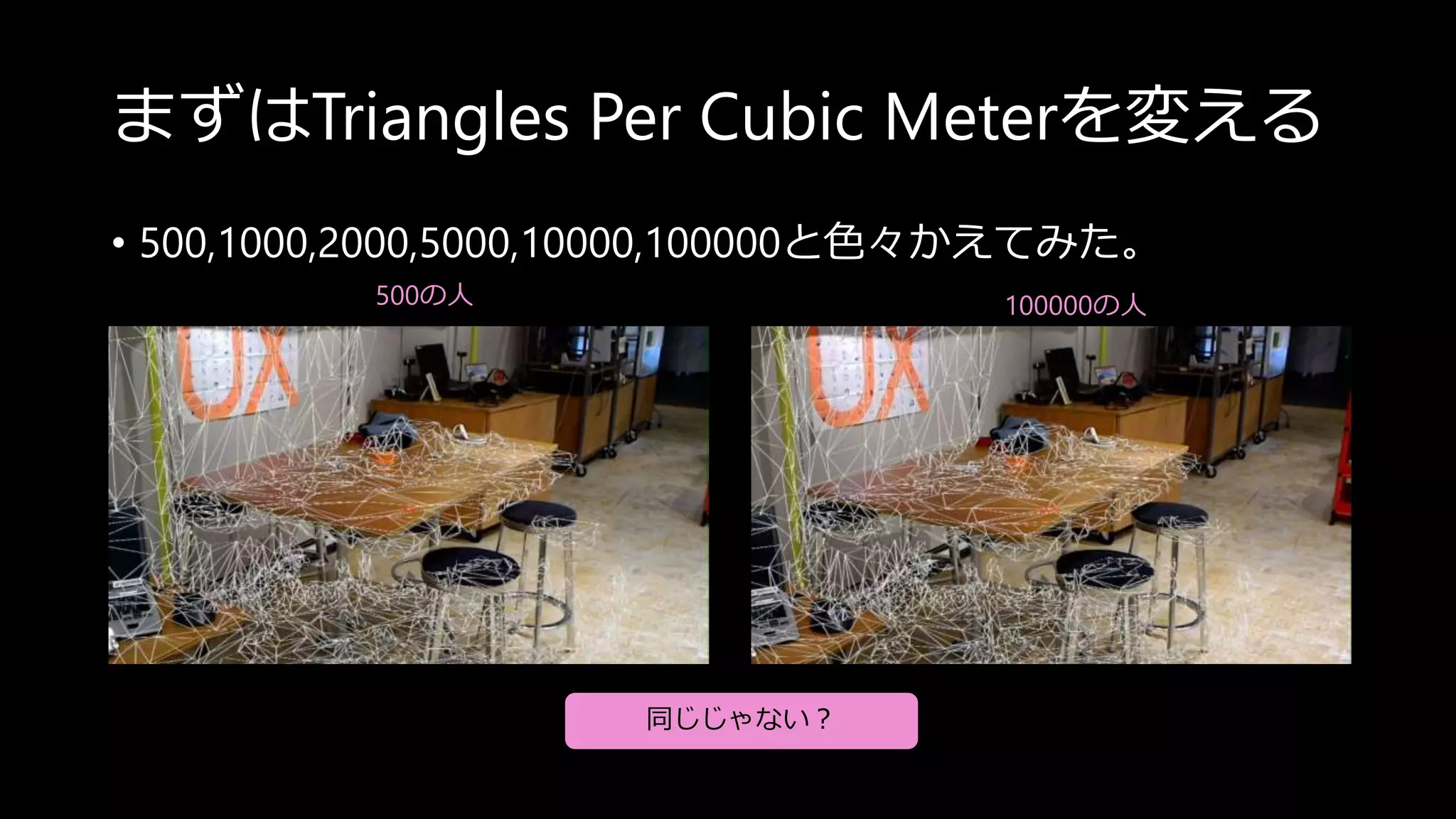
まずはTriangles Per Cubic
Meterを変える • 500,1000,2000,5000,10000,100000と色々かえてみた。 同じじゃない? 500の人 100000の人
11.
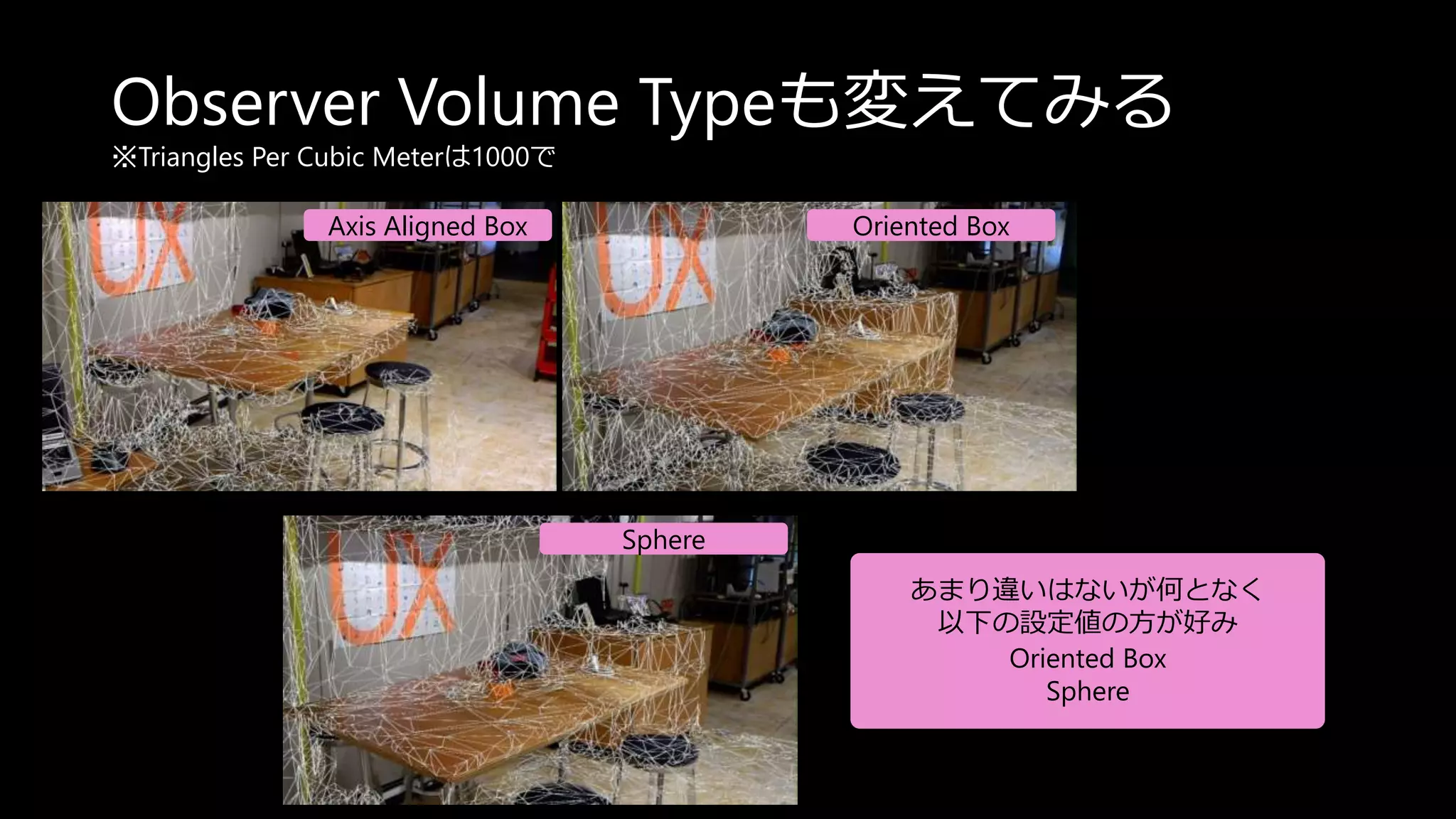
Observer Volume Typeも変えてみる ※Triangles
Per Cubic Meterは1000で Axis Aligned Box Oriented Box Sphere あまり違いはないが何となく 以下の設定値の方が好み Oriented Box Sphere
12.
結果から考察するに。。。 変更してもあまり効果がない。 おそらく空間マッピングの解像度以上の設定しても細かくはならないからでは。 Triangles Per Cubic
Meter あまり違いはなかったが「Oriented Box」「Sphere」の設定の方が形状に沿っている雰囲気 があった。 Observer Volume Type
13.
実は情報はあった Triangles Per Cubic
Meterのパラメータは HoloLensでは大雑把に以下の設定値くらい Low -> 100 Med -> 750 High -> 2000 https://forums.hololens.com/discussion/1873/more- than-1200-triangles-per-qubic-meter
14.
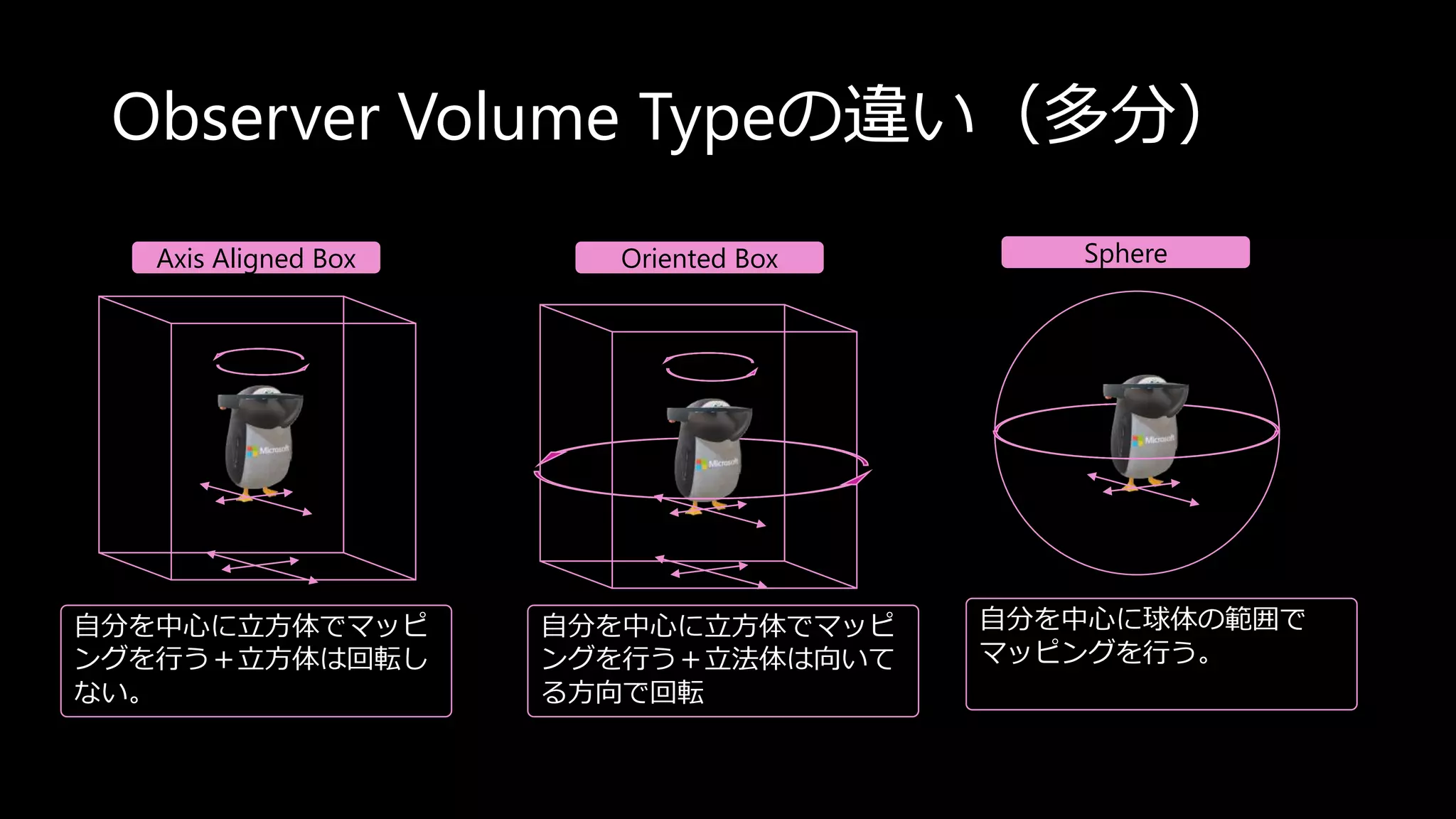
Observer Volume Typeの違い(多分) Axis
Aligned Box Oriented Box Sphere 自分を中心に球体の範囲で マッピングを行う。 自分を中心に立方体でマッピ ングを行う+立法体は向いて る方向で回転 自分を中心に立方体でマッピ ングを行う+立方体は回転し ない。
15.
大阪駆動開発 関西を中心に、IT系のおもしろそうなことを楽しんでやるコミュニティ