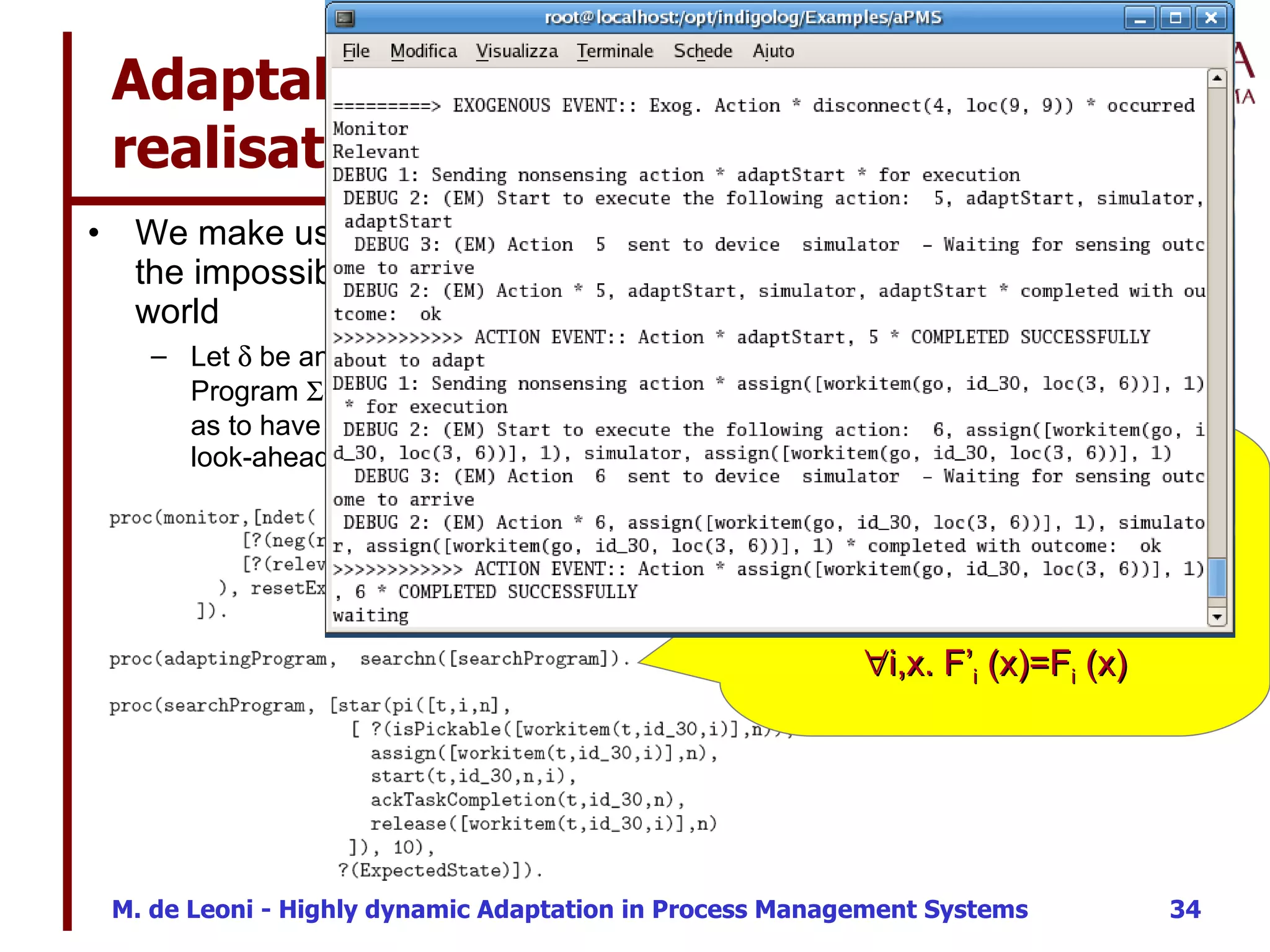
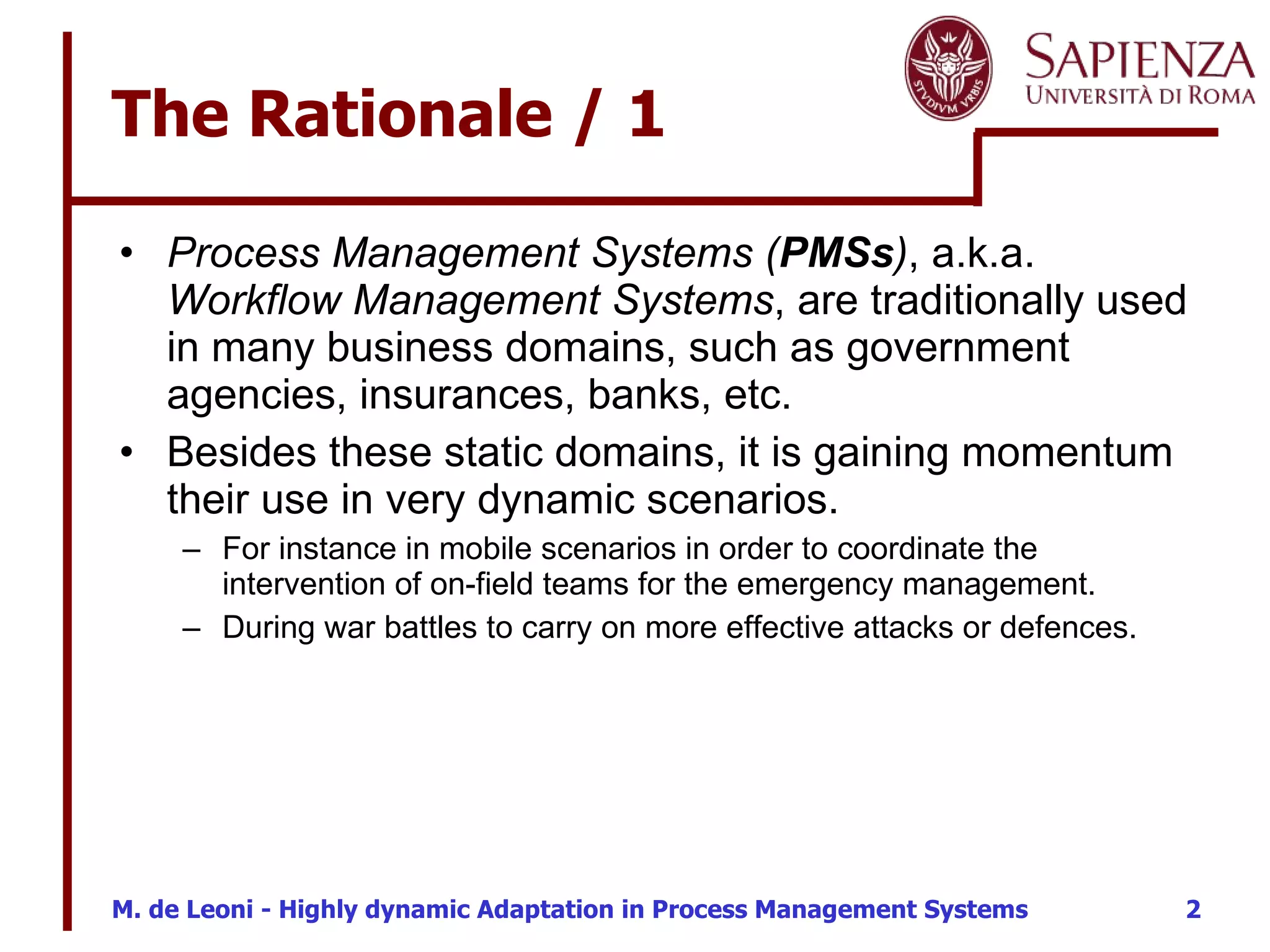
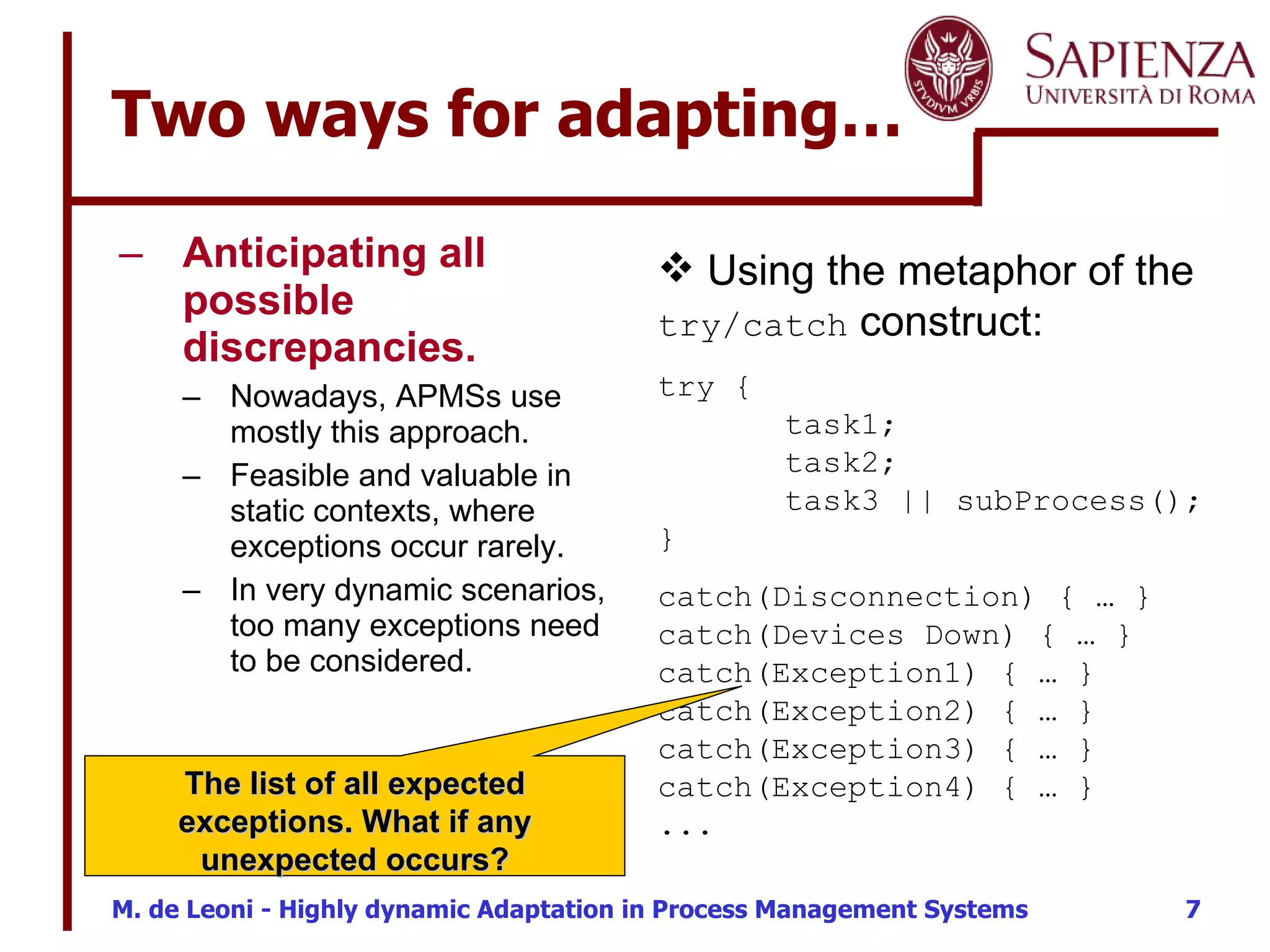
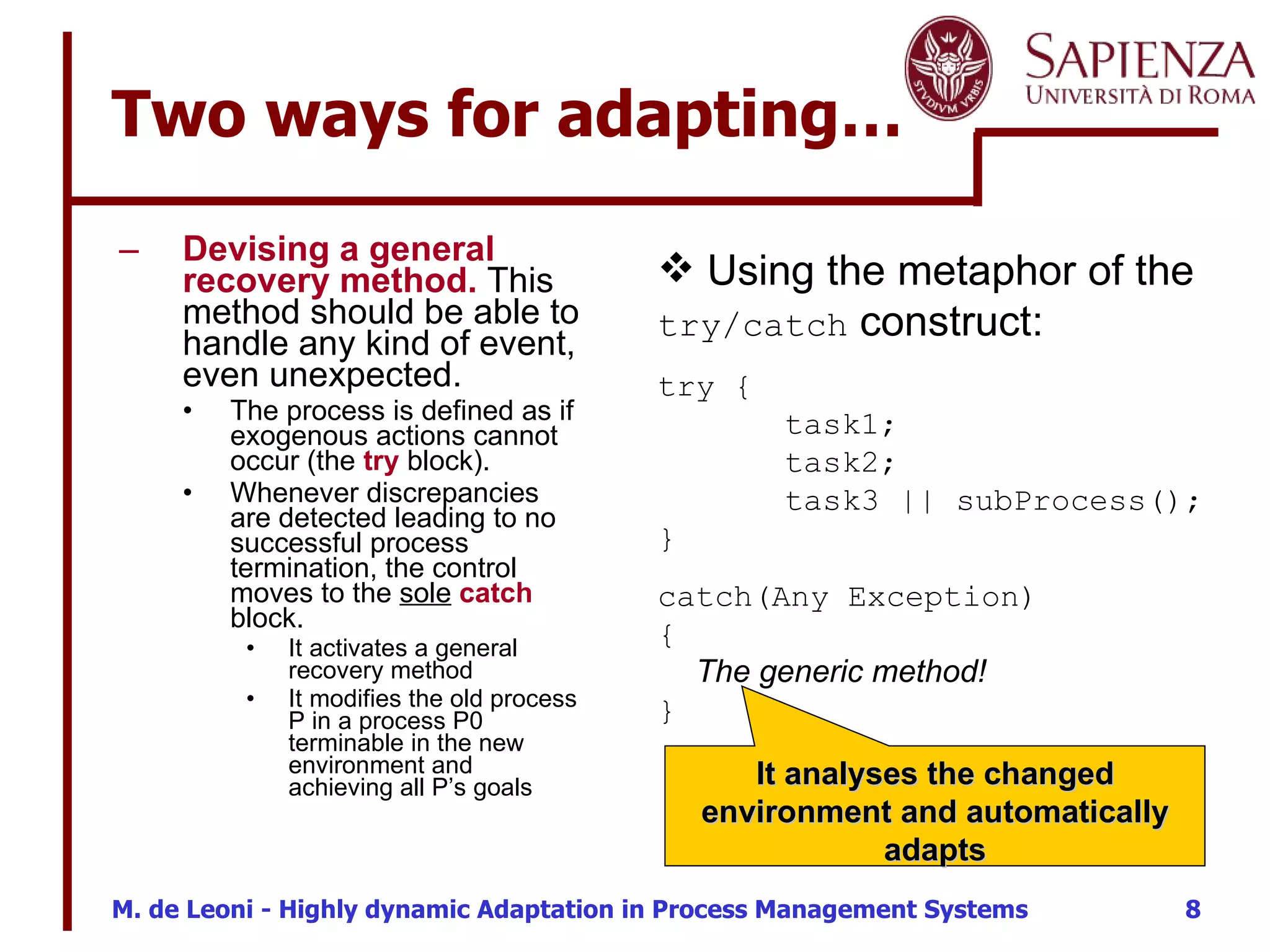
The document discusses adaptive process management in highly dynamic scenarios. It notes that traditional process management systems are not well-suited for dynamic environments where actors and services can join or leave unpredictably. It proposes two approaches for adaptation: 1) anticipating all possible exceptions or 2) using a general recovery method to handle any exception. The latter is preferable for highly dynamic scenarios due to the large number of possible exceptions.

![Annotating with the goals pursued by branches Every sequence of tasks can be optionally annotated with the goals pursued. Later, we use the regression operator to learn which intermediate goals should be achieved in order to obtain the final goal at the end of the sequence R s ( ( do ([ a 1 ; … ; an ] ; s ))) is the formula with situation s which denotes the facts/properties that must hold before executing a 1 ;…; an in situation s such that ( do ([ a 1 …an ] ; s )) to hold](https://image.slidesharecdn.com/seminario-12500615862904-phpapp02/75/Ph-D-final-defense-22-2048.jpg)
![Dependency among parallel branches /1 Before adapting, at any time when program/process progresses executing, it can be represented δ’ = [ p 1 || p 2 || … || p N ]; δ b Branches p 1 , p 2 , … , p N may or may not be depending among them (whether they are or are not working on the same fluents). Independent branches are such that every trace of concurrent execution of the activities of branches do not affect the successful achievement of the respective goals: If m is the length of each of the sequences (supposing all having the same length) and N is the number of concurrent processes/branches, then Checking this independence directly is O(m N )](https://image.slidesharecdn.com/seminario-12500615862904-phpapp02/75/Ph-D-final-defense-23-2048.jpg)
![Dependency among parallel branches /2 Instead of taking all execution traces, we have proven that we can take the traces generated by all pairs of sub processes pi and pj The cost is O(m 2 N 2 ) where and Action a can be executed at any time during the execution of [ a 1 ,…,a n ] without affecting the achievement of G, and with no change of the invariant C](https://image.slidesharecdn.com/seminario-12500615862904-phpapp02/75/Ph-D-final-defense-24-2048.jpg)
![If branches are not independent A repairing handler h is built to repair the broken branch p i and executed: δ’’ = h; [ p 1 || p 2 || … || p i-1 || p i || … || p N ]; δ b We use a planner to build a plan/handler aiming at reducing the gap between the virtual reality and the world. p 1 p 2 p 3 Process Counter h M. de Leoni, M. Mecella, G. De Giacomo “ Highly Dynamic Adaptation in Process Management Systems through Execution Monitoring” In Proc. of the 5th International Conference on Business Process Management (BPM 2007)](https://image.slidesharecdn.com/seminario-12500615862904-phpapp02/75/Ph-D-final-defense-25-2048.jpg)
![If branches are independent A repairing handler h is built to recovery the broken branch p i , and executed: δ’’ = [ p 1 || p 2 || … || p i-1 || (h; p i ) || … || p N ]; δ b Only p i is delayed. The others continue being executed even while p i is being repaired. In order to repair: We obtain the values that fluents should hold (i.e., the state) in order to have the p i goal achieved. We use a planner to build h by using the fluents values desired as goal The planner must ensure that handler (h; p i ) continues preserving independence, as p i did when alone. h p 2 p 3 Process Counter M. de Leoni, G. De Giacomo, Y. Lesperance, M. Mecella “ On-line Adaptation of Sequential Mobile Processes Running Concurrently” In Proc. of the 24th Annual ACM Symposium on Applied Computing (SAC 2009) p 1](https://image.slidesharecdn.com/seminario-12500615862904-phpapp02/75/Ph-D-final-defense-27-2048.jpg)