Download to read offline
![Semantic Octree
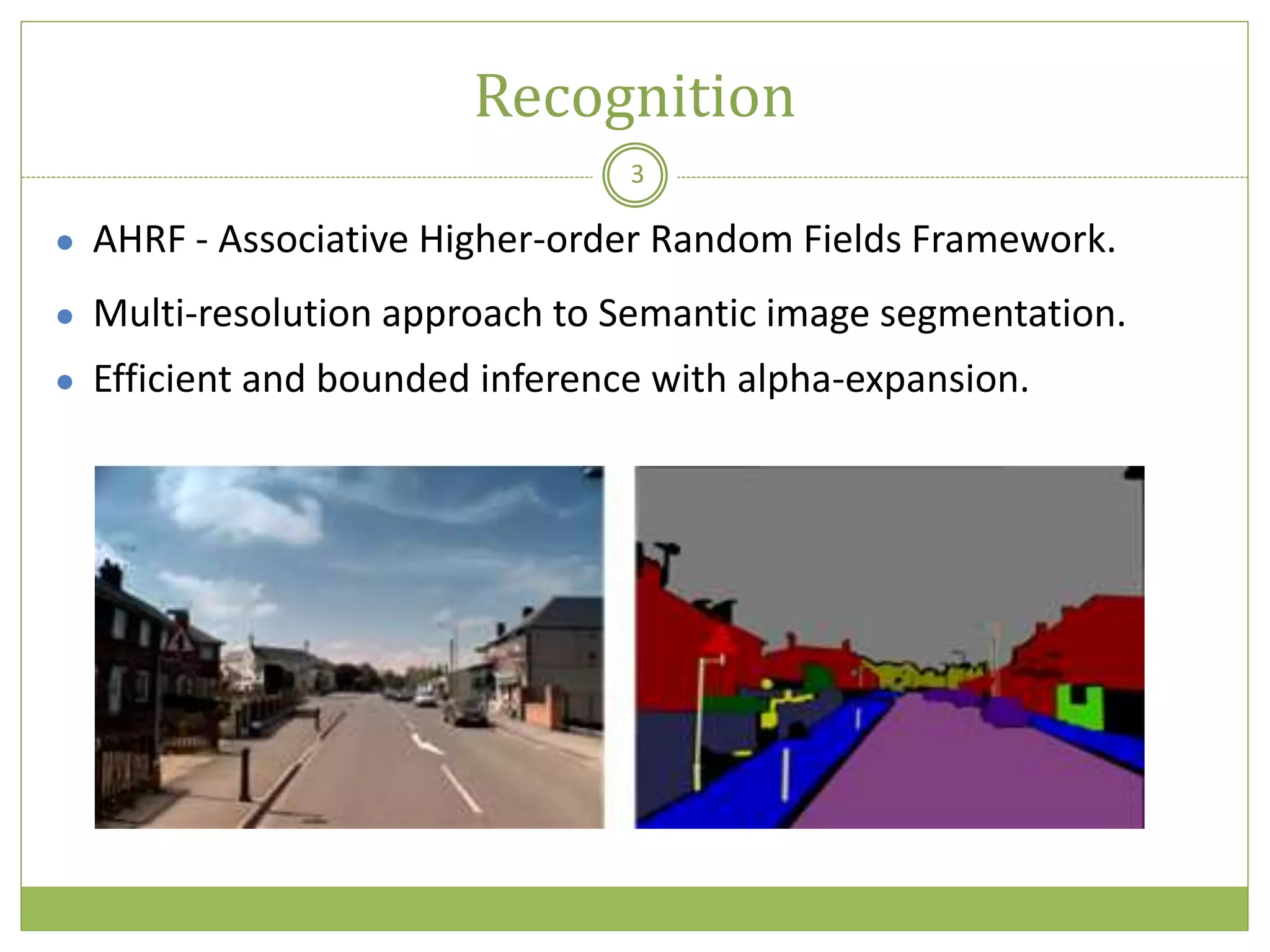
Recognition
Structured Prediction widely adopted in vision: AHRF[1]
Efficiency of the outputted structure is not the focus.
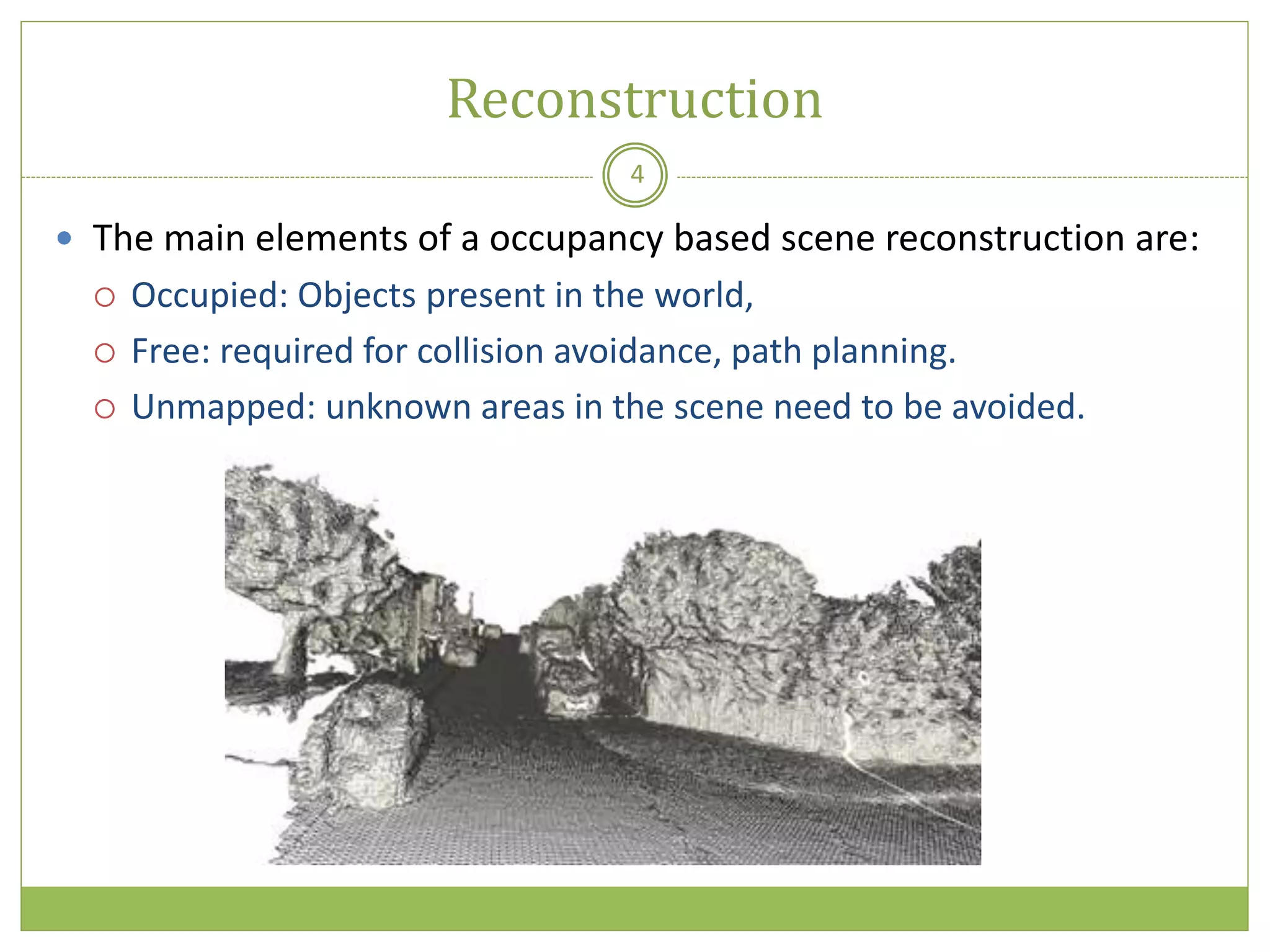
Reconstruction
Octree widely adopted in robotics: Octomap[2]
Incorporating high level semantic information is not the focus
Unifying Representation
Complementary to recognition and reconstruction.
Efficient for further manipulations of underlying data.
Combine Octomap and AHRF to get best of both
2
[1] P. Kohli et at. Robust Higher Order Potentials for Enforcing Label Consistency
[2] O Armin et. al., OctoMap: An efficient probabilistic 3D mapping framework based on octrees.](https://image.slidesharecdn.com/semanticoctreedetailedv2-150605092603-lva1-app6892/75/ICRA-2015-interactive-presentation-2-2048.jpg)
![ Quantitative evaluation :
Performed by projecting into image domain
Observations
Small objects tend to get decimated due to octree quantization while mesh
based representation better in representing surface.
Results
16
[1] Sengupta et.al. “Urban 3d semantic modelling using stereo vision,” in ICRA, 2013
[2] Valentin, et. al , “Mesh based semantic modelling for indoor and outdoor scenes,” in CVPR, 2013
[2]
[1]
[1]
[2]
[1]
[1]](https://image.slidesharecdn.com/semanticoctreedetailedv2-150605092603-lva1-app6892/75/ICRA-2015-interactive-presentation-16-2048.jpg)

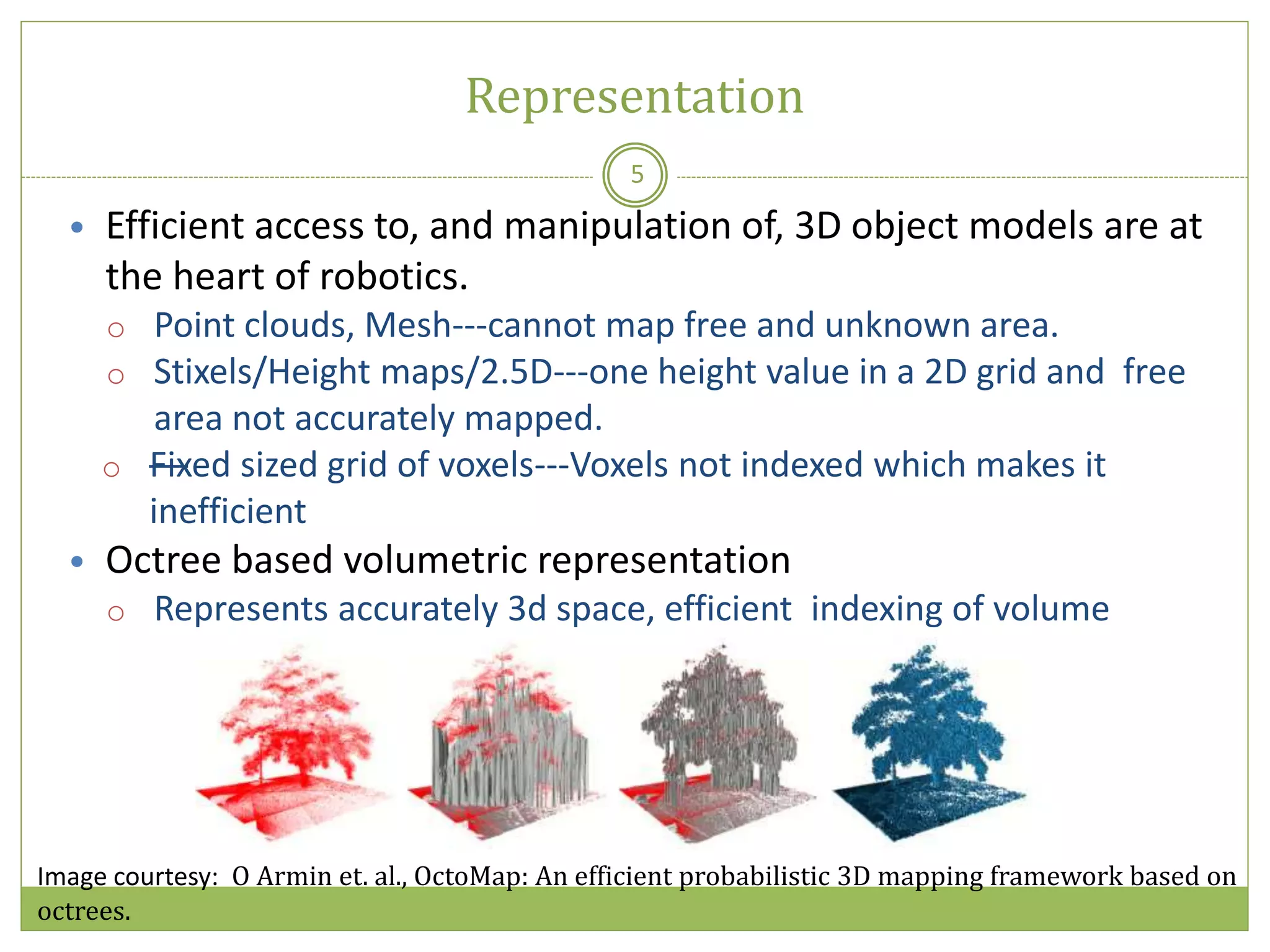
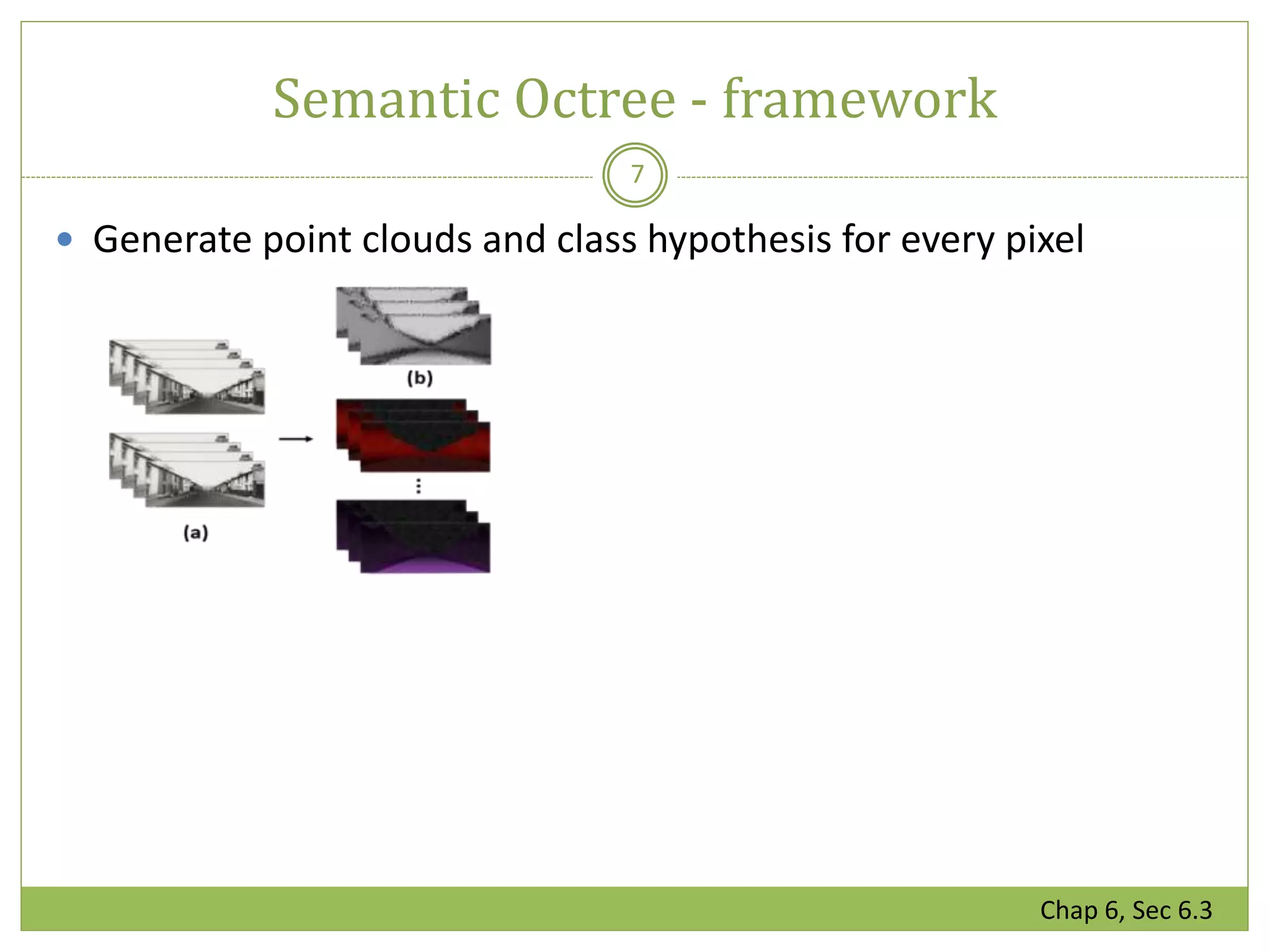
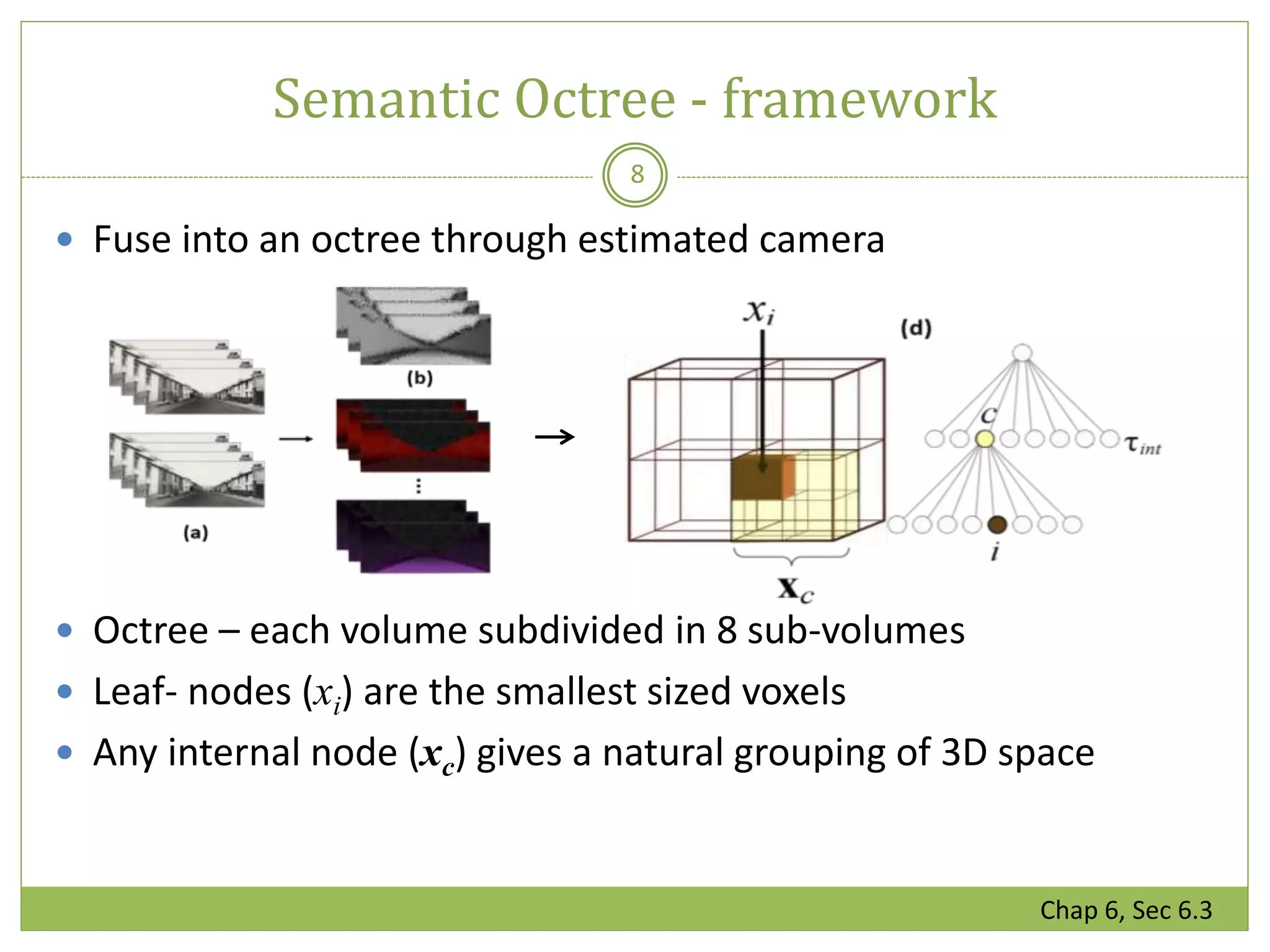
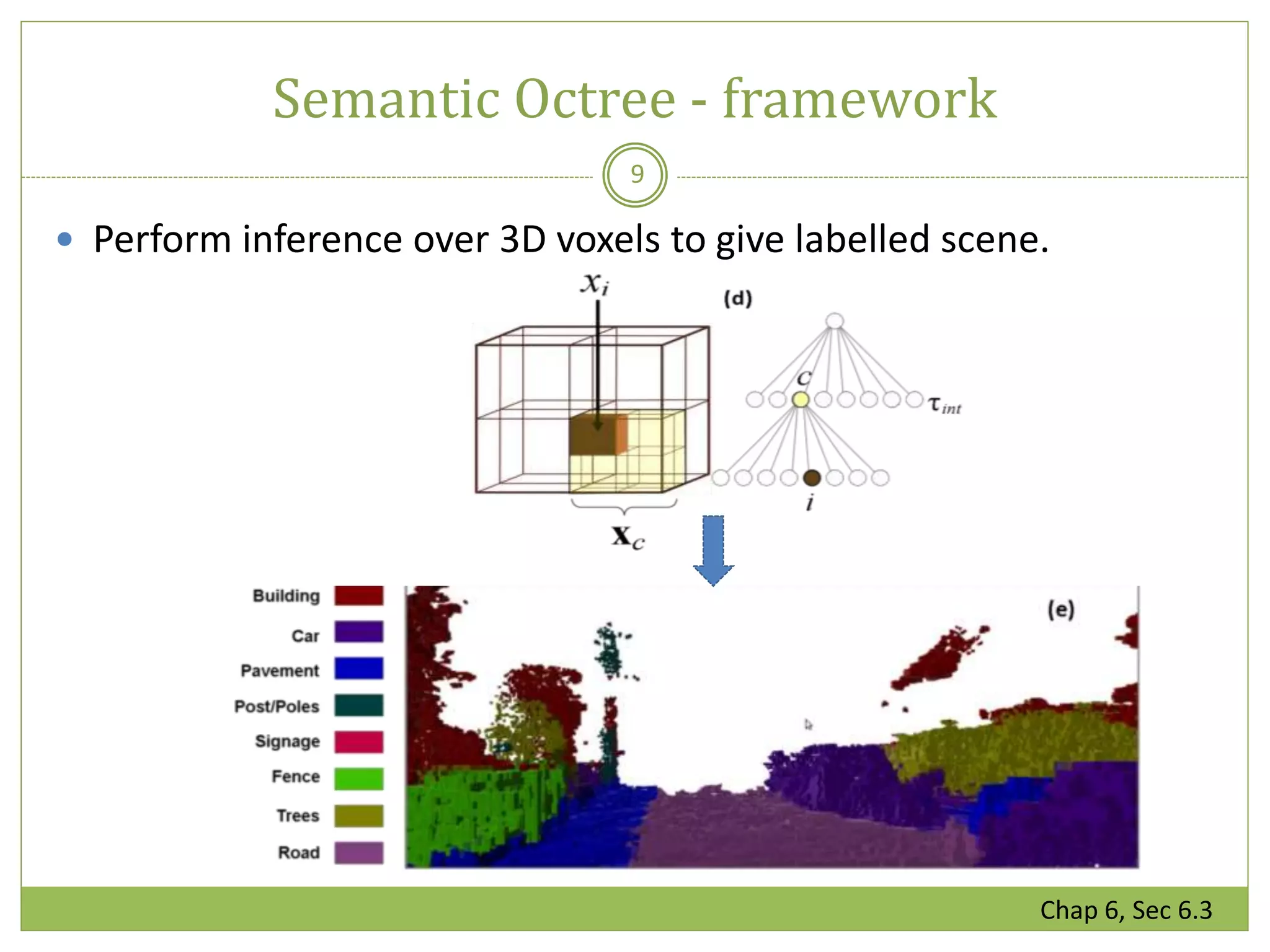
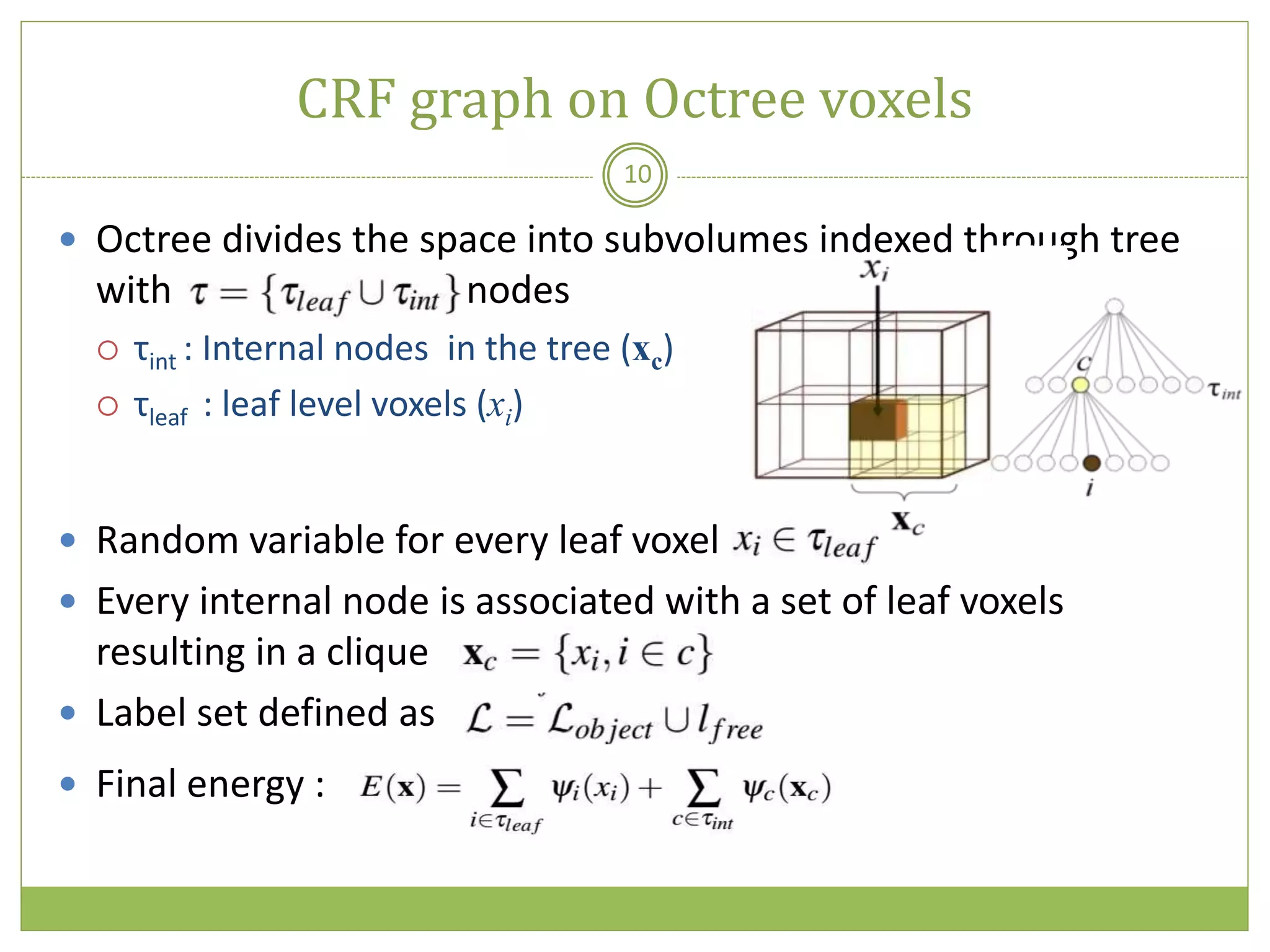
This document proposes a semantic octree framework that unifies recognition, reconstruction, and representation of 3D scenes using an octree constrained higher order Markov random field. It combines associative higher-order random fields (AHRF) for semantic segmentation with octree-based volumetric mapping. The framework takes stereo images as input, generates point clouds and class hypotheses, then fuses the data into an octree. Inference over the octree voxels assigns labels to produce a semantically labelled 3D scene. The approach allows for efficient access and manipulation of 3D models through the octree representation.




























![[NS][Lab_Seminar_240611]Graph R-CNN.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar240611graphr-cnn-240704112605-f42276be-thumbnail.jpg?width=640&height=640&fit=bounds)