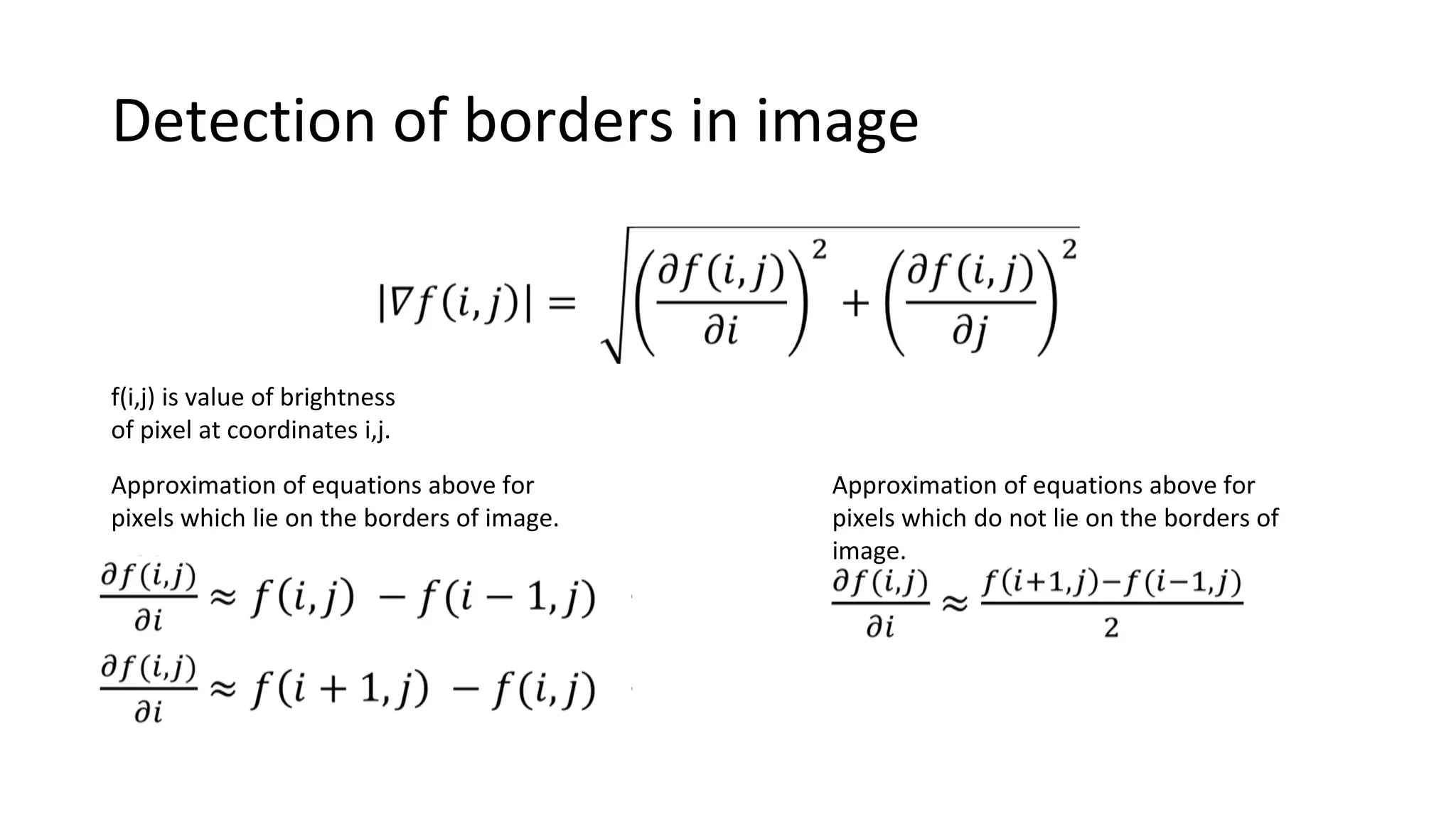
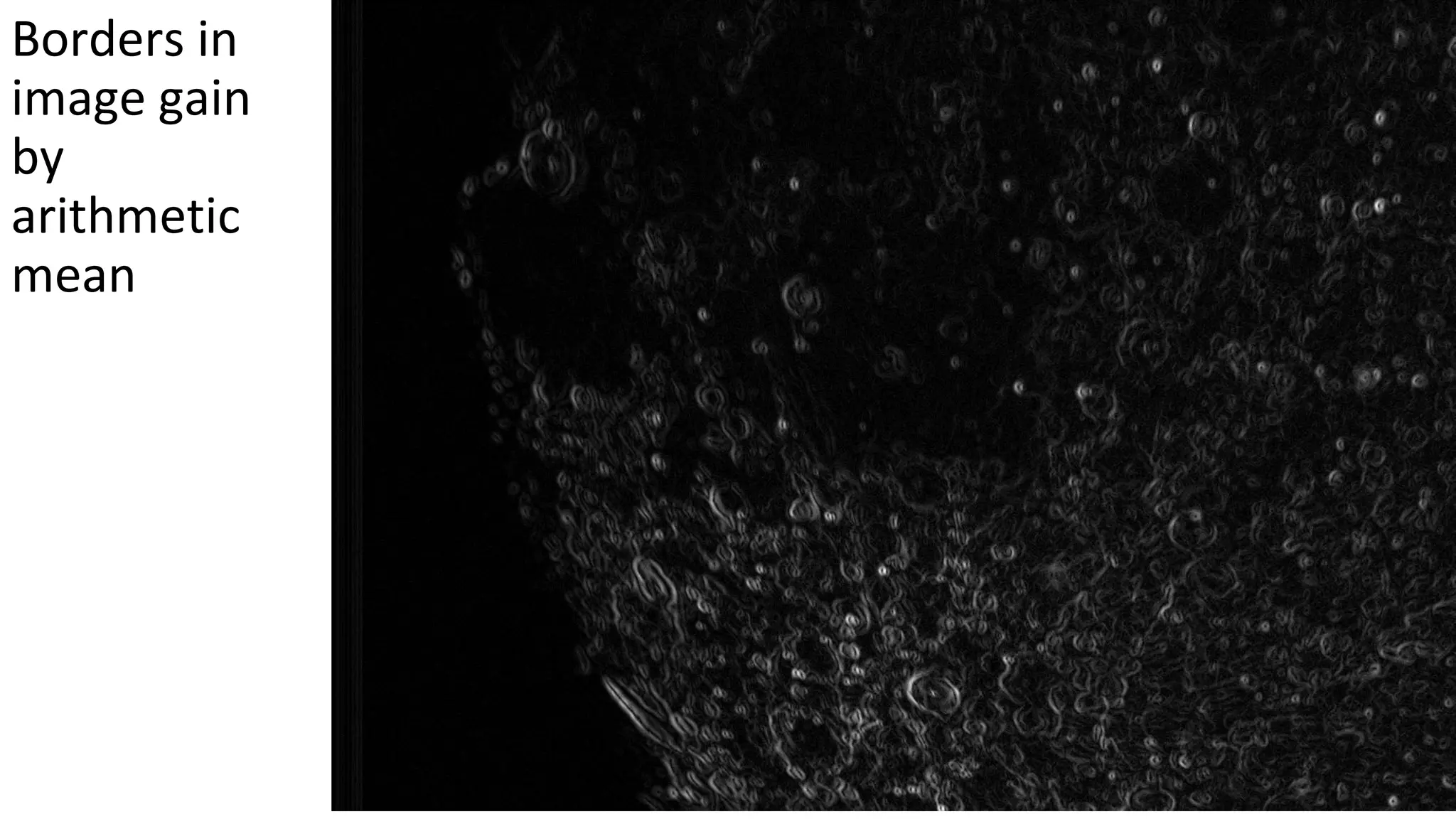
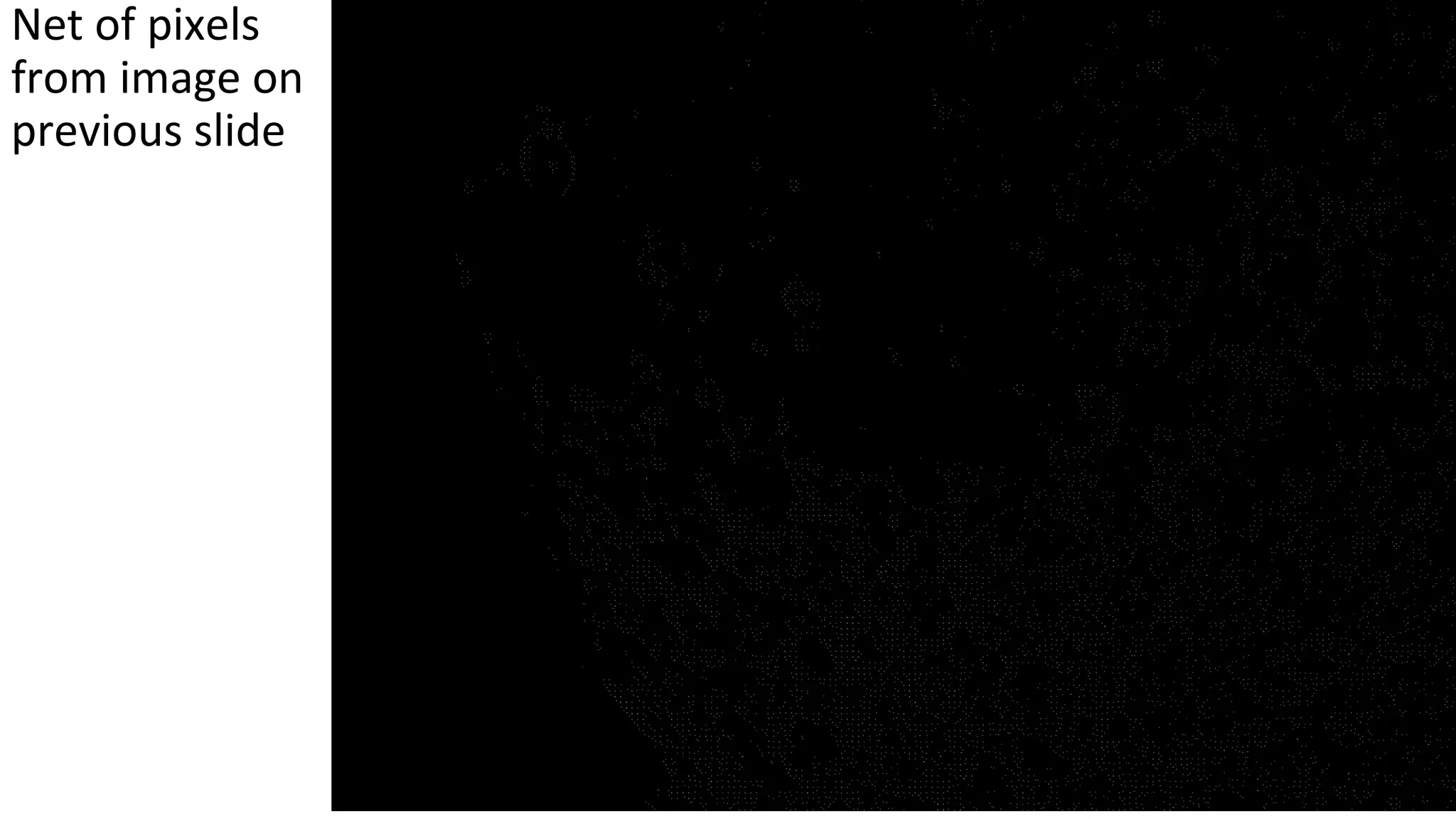
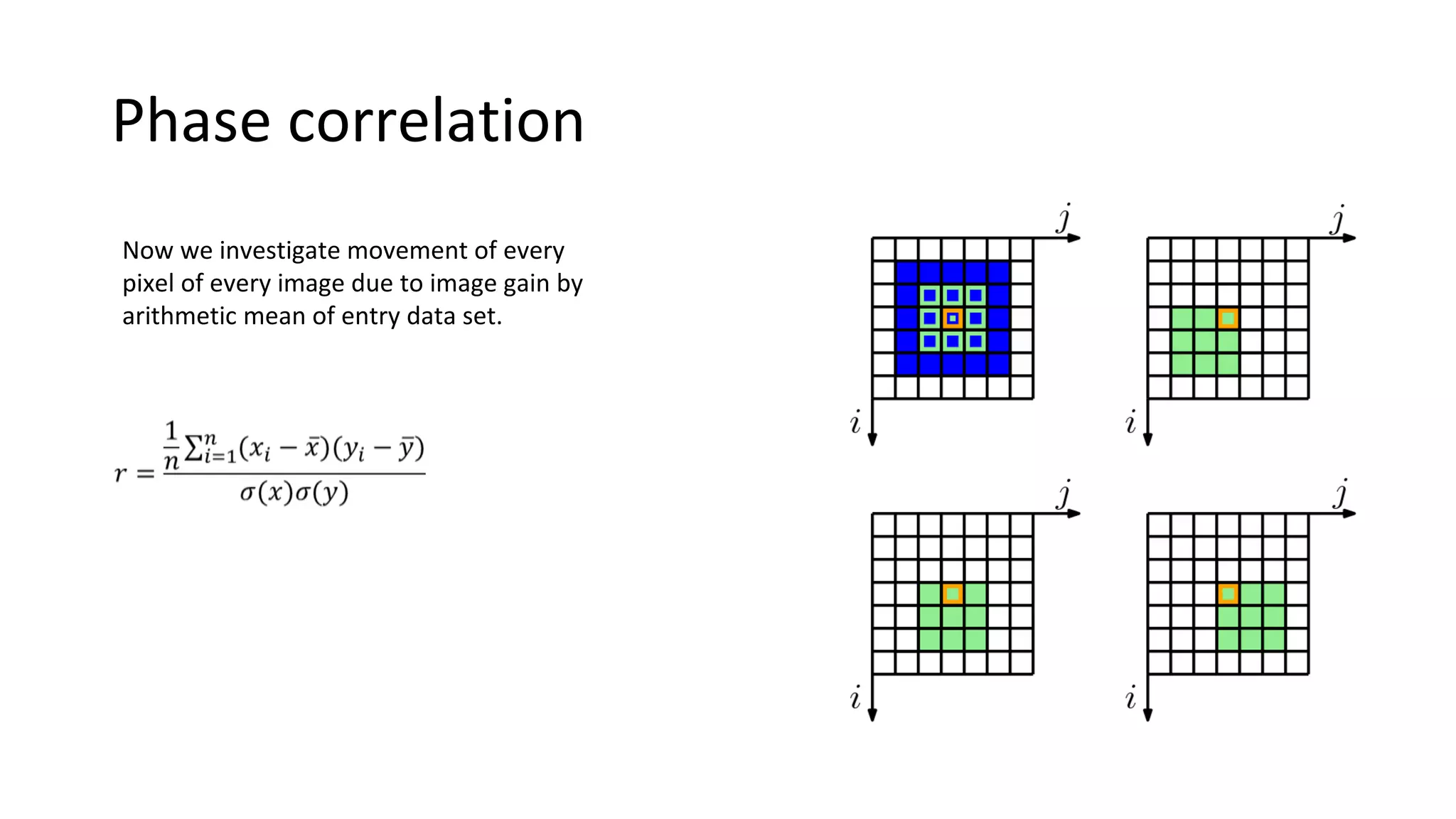
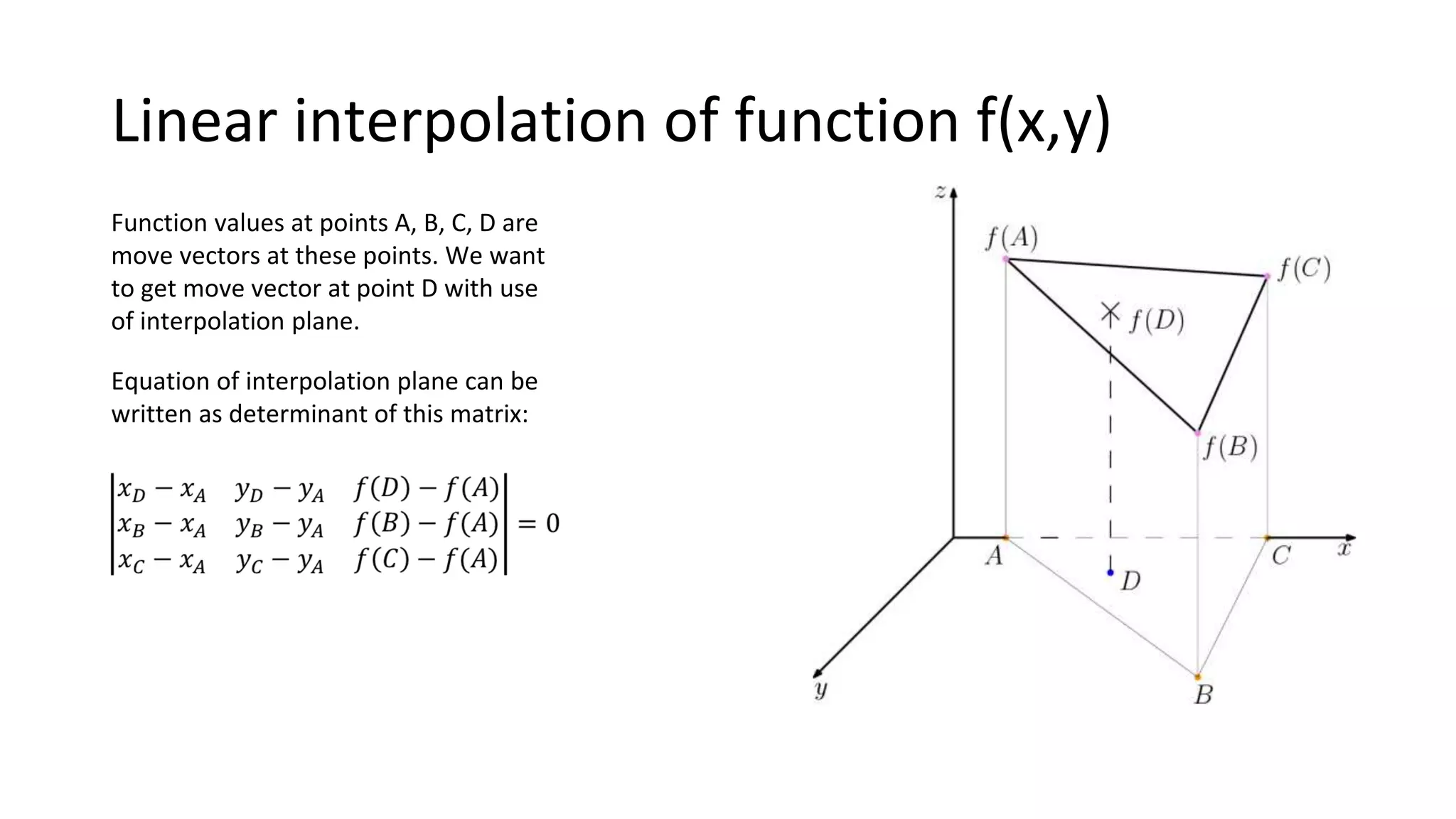
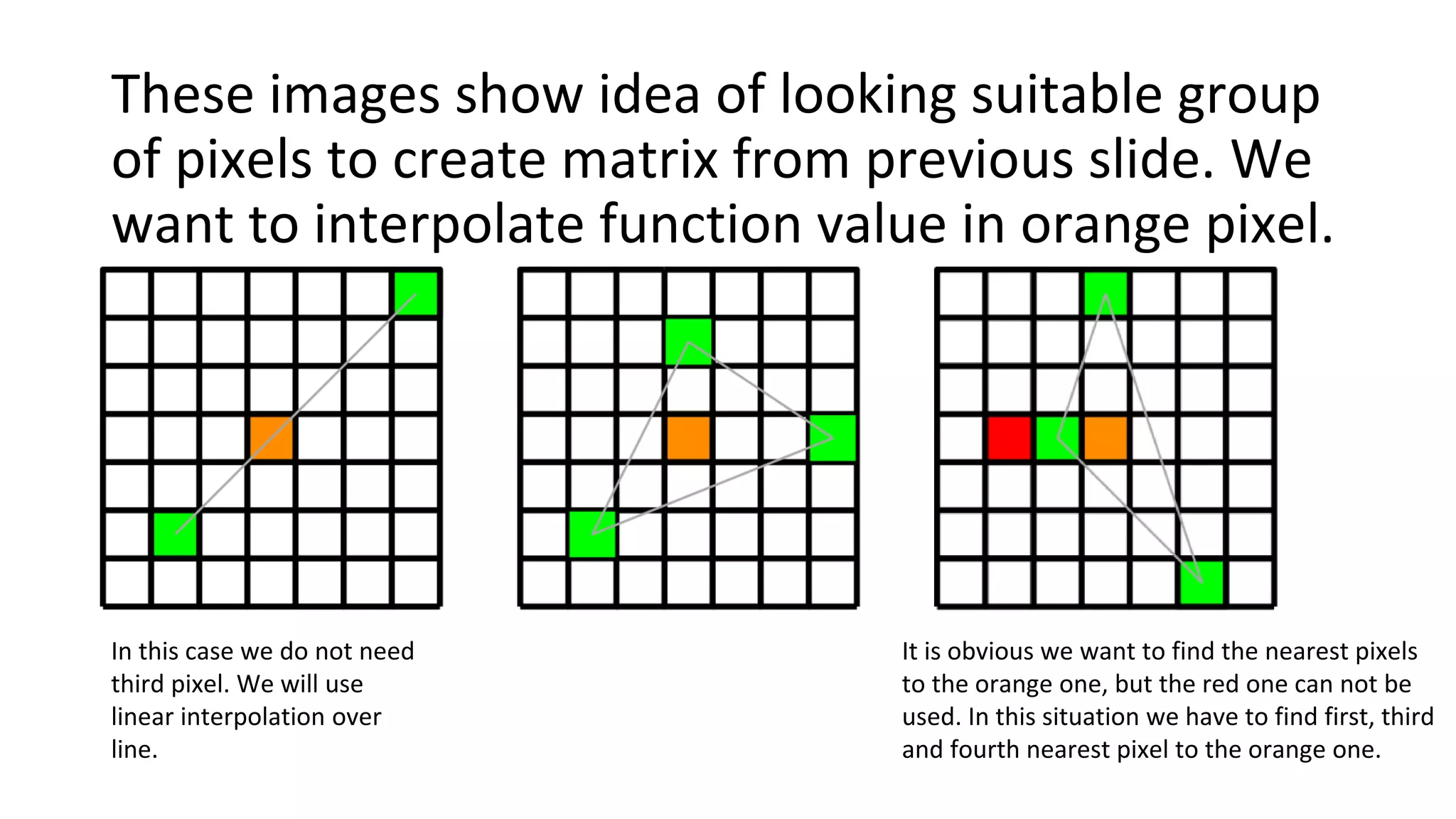
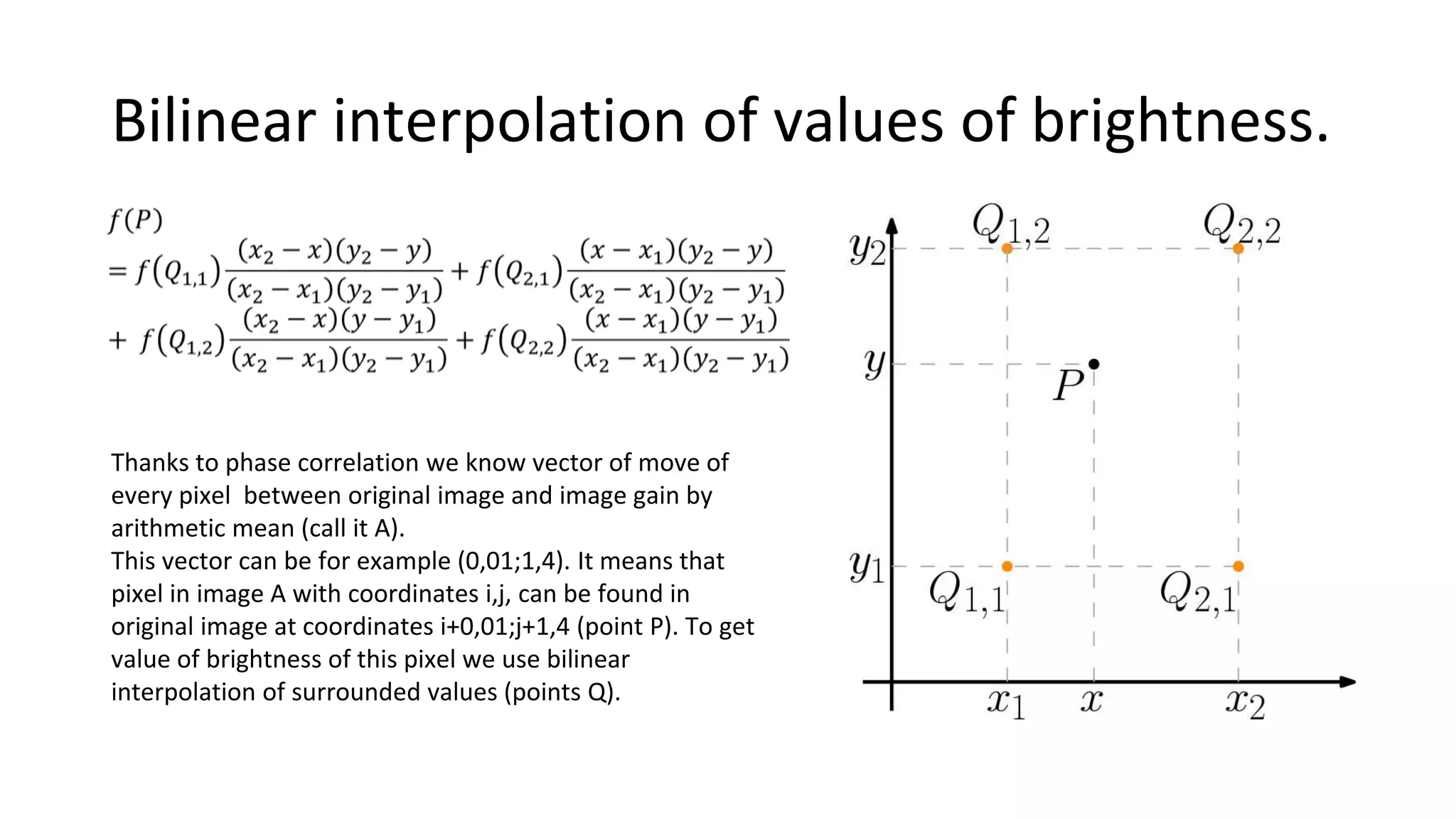
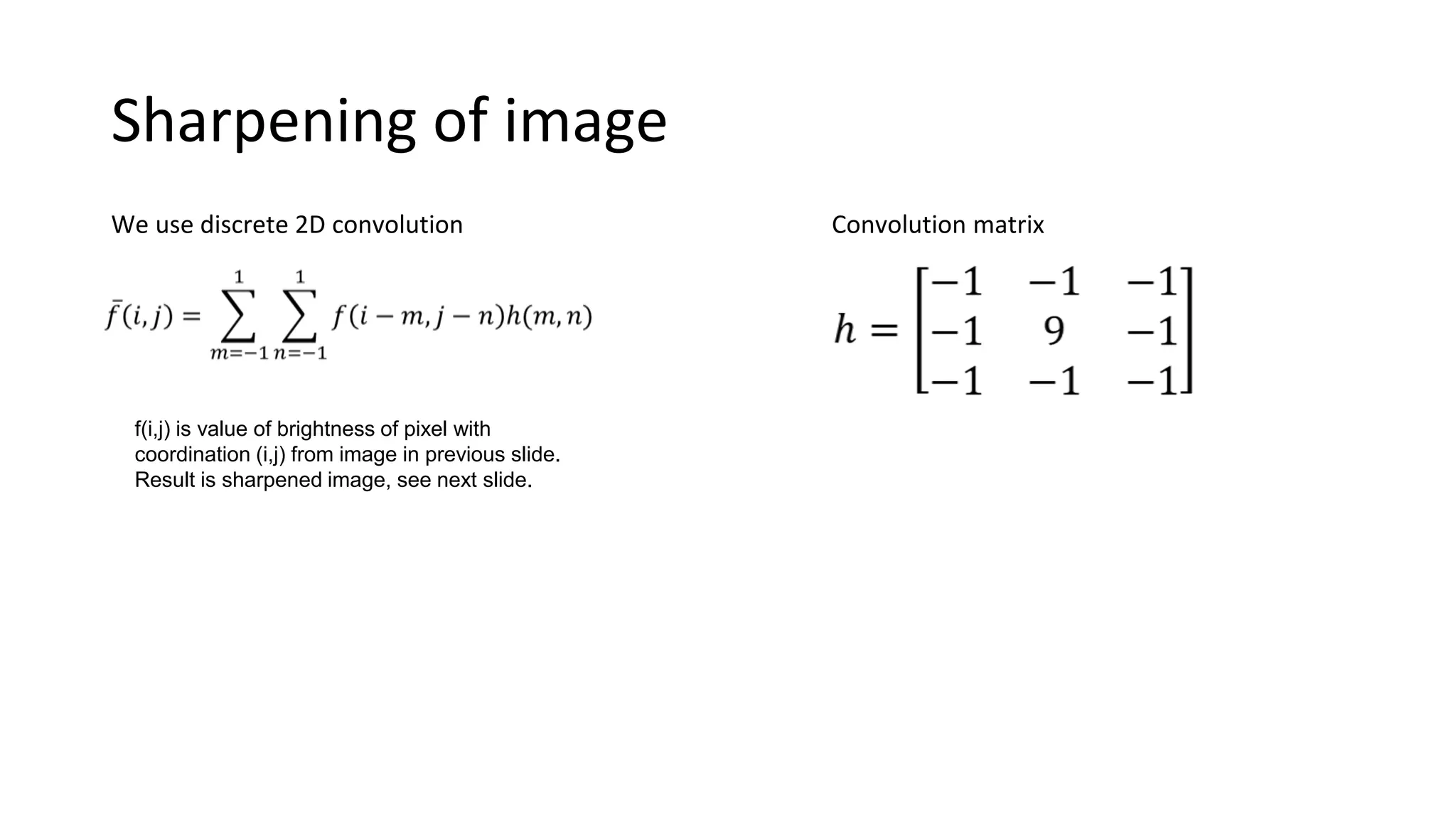
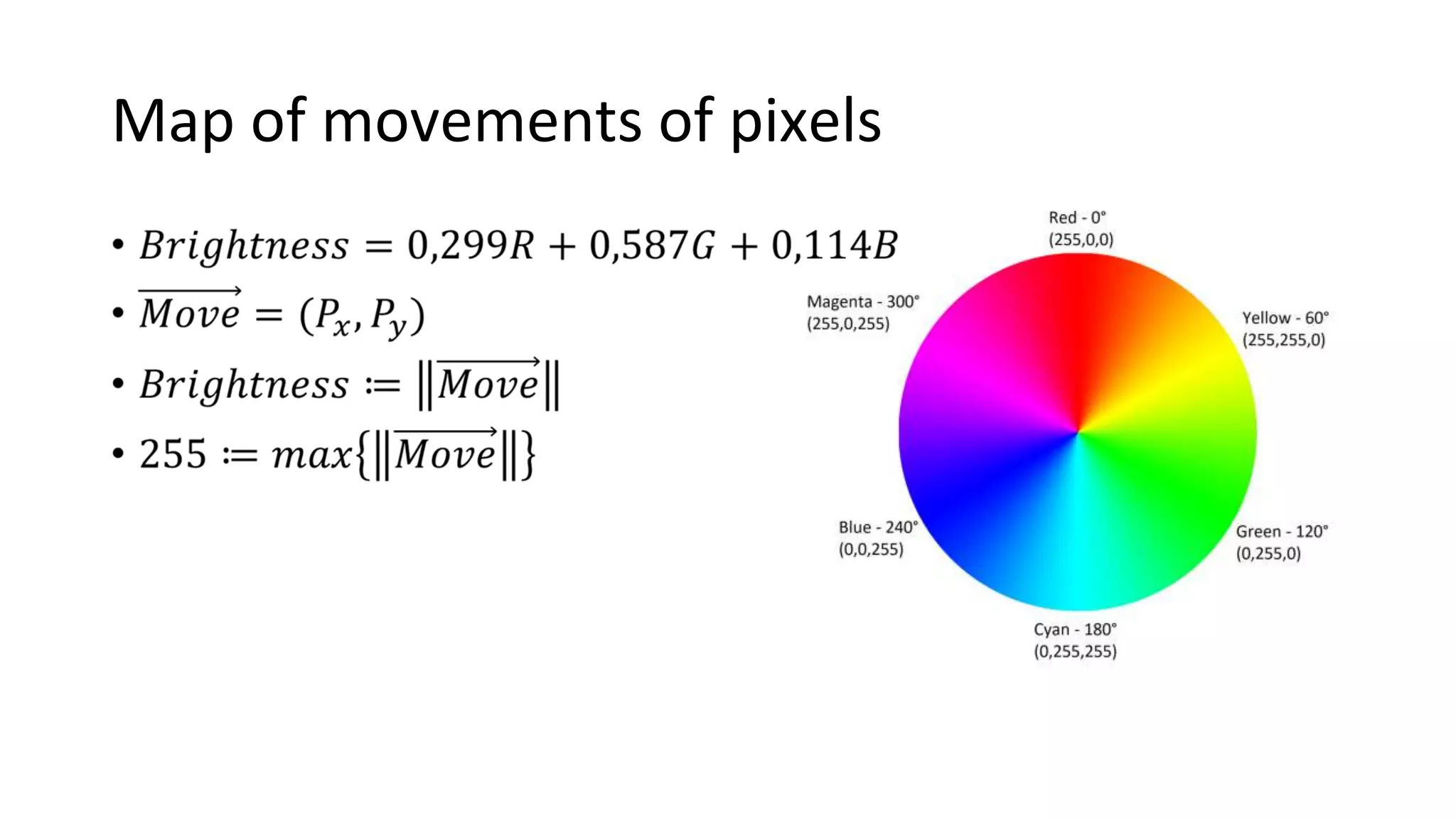
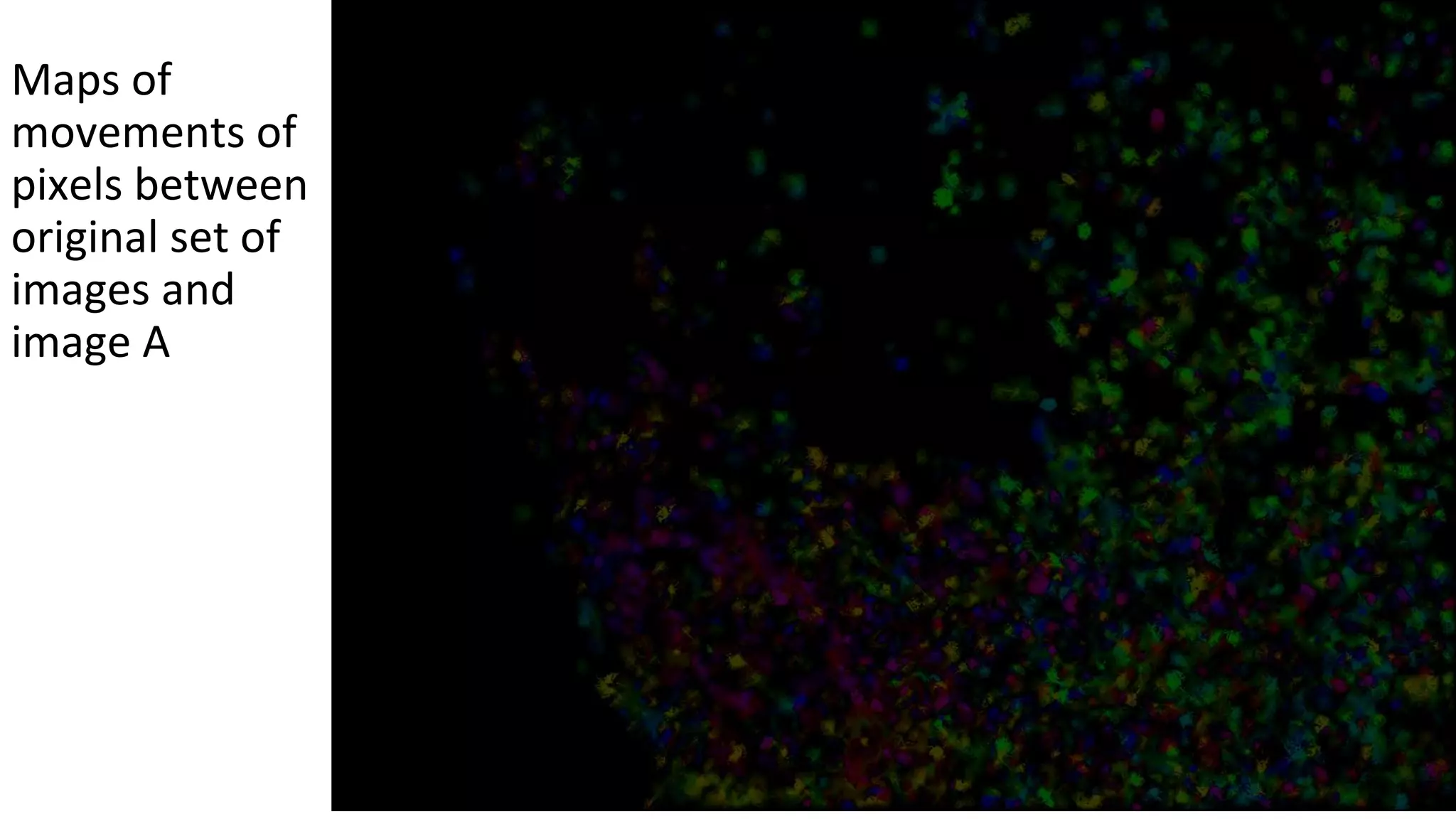
This document describes numerical methods for image registration using nonlinear geometric transformations. It aims to summarize techniques for analyzing sets of images affected by geometric distortions, and developing software to reduce those distortions. Key steps include: using phase correlation to determine pixel movement between images; linear and bilinear interpolation to estimate pixel values at fractional coordinates; and arithmetic averaging to create a mean image from the corrected set. Maps of pixel movements between original and mean images are also generated. The overall goal is to produce a registered, sharper mean image estimating the true average value from the input dataset.