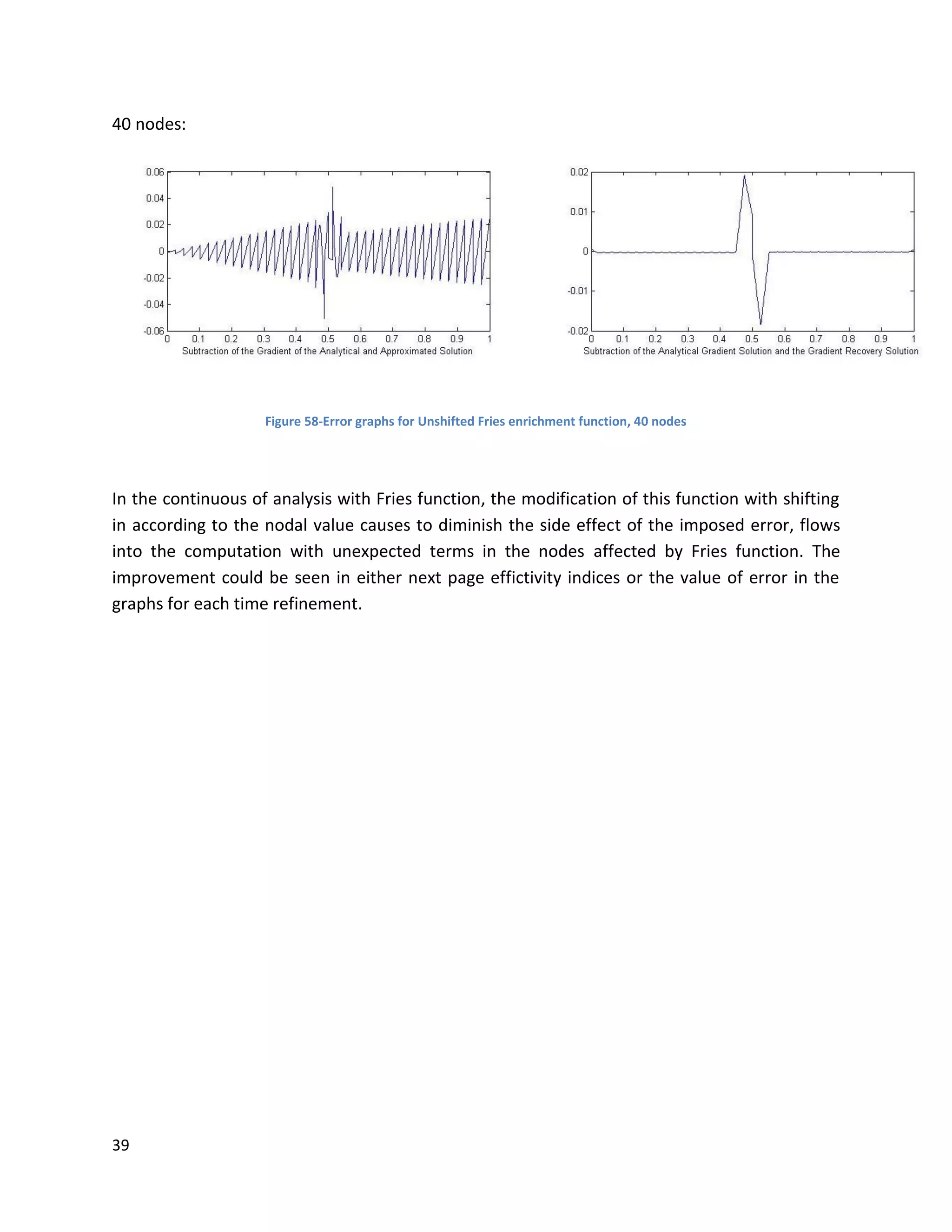
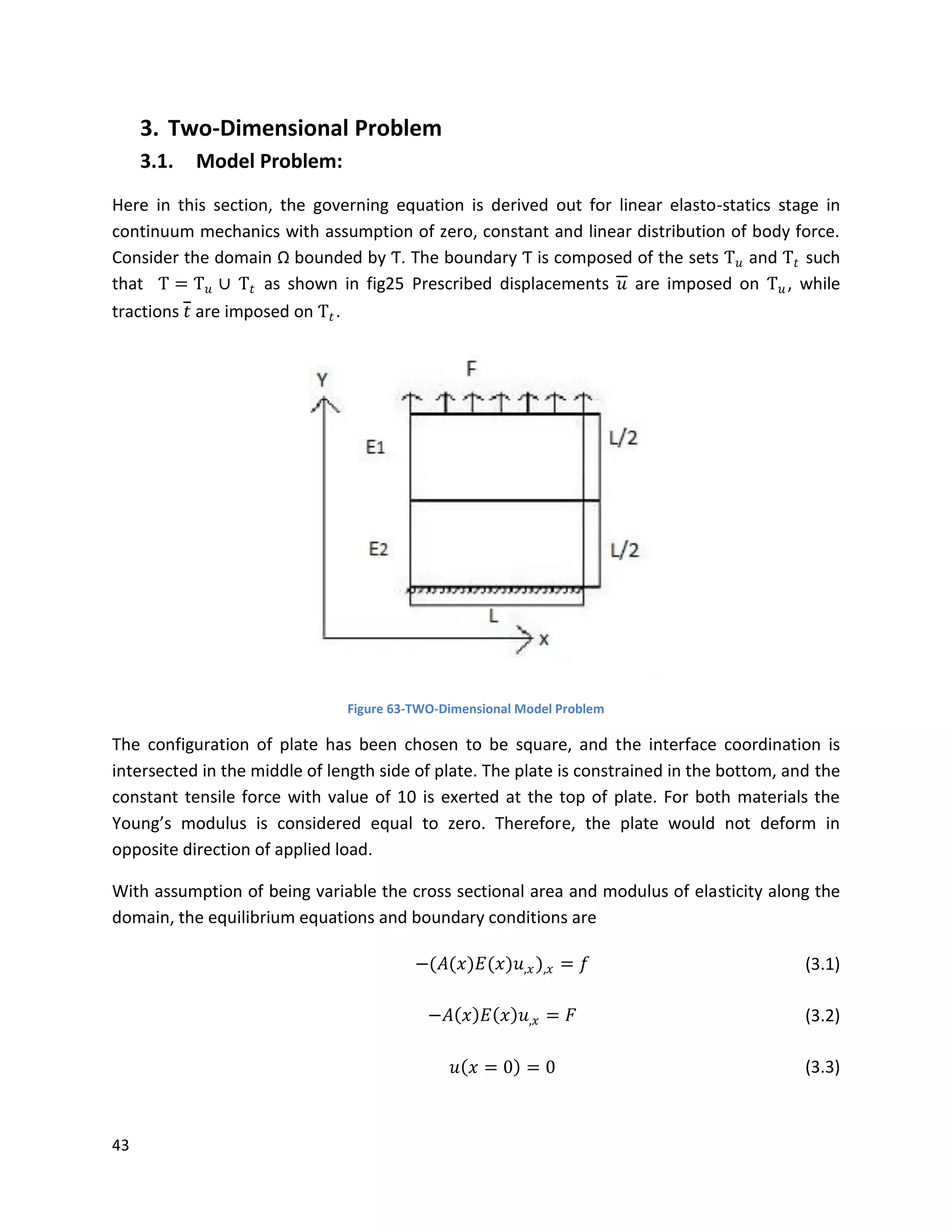
This document presents a study on a posteriori error estimation for the extended finite element method (XFEM). It discusses modeling discontinuities using XFEM for one- and two-dimensional problems. The study develops a recovery-based error estimator to measure the difference between the direct and post-processed approximations of the gradient from XFEM solutions. It aims to provide a smoothed gradient that is superior to the discontinuous gradient from the original finite element approximation. The document includes an introduction covering element approximation techniques, computational fracture mechanics, a posteriori error estimation, and an outline of the following sections on one-dimensional and two-dimensional model problems, XFEM formulations, and implementation results.
![7
1. Introduction
This chapter provides an introduction to discontinuous enrichment in the finite element
framework, and a solution to measure the accuracy of this tool for approximated solution in
comparison to the exact solution without enhancing the exact equation. The introduction
consists of four sections. Section 1.1 reviews some advancements made in element and
approximation technology in the recent progress of finite element method (FEM). The method
developed in the field of fracture mechanics, and pertinent issues are reviewed in section 1.2.
The following section discusses a posteriori error estimation principles, and suggests its
advantages over the adaptivity and discontinuous enrichment methods. Finally, section 1.4
provides an outline of the remainder of the work.
1.1. Element and Approximation Technology
Finite element methods (FEM) have been widely used since their appearance six decades ago.
This popularity is due to their flexibility to deal with numerous problems and due to their
robustness. The FEM is used by scientists and engineers to investigate the dynamic failure of
structures, turbulent flow around an airfoil, heat transfer, and electromagnetism just to name a
few applications. While the finite element method is robust, it is not particularly well suited to
models involving discontinuities or singularities.
Due to the fact that standard finite element methods are based on piecewise differentiable
polynomial approximation (Galerkin method), they rely on an element topology for
construction of an approximating space. The construction of a discontinuous space with finite
elements necessitates the alignment of the element boundary with the geometry of the
discontinuity. Typically, finite element methods require significant mesh refinement or meshes
which conform with these features to get accurate results. This is not only computationally
costly and cumbersome but also results in loss of accuracy as the data is mapped from old mesh
to the new mesh. To compensate this deficiency of standard finite element methods, extended
finite elements have been developed.
The partition of unity approach (Melenk and Babuska 1996 [17]) offered a systematic
methodology to incorporate arbitrary functions into the finite element approximation space.
Due to this it is then possible to incorporate any kind of function to locally approximate the
field. These functions may include any analytical solution of the problem or any a priori
knowledge of the solution from the experimental test. From there, X-FEM is able to reproduce
the problematic features, i.e., discontinuities and the singularities, without changing mesh sizes
and dramatically improved results are obtained. Since the introduction of extended finite
element method by (Moes, Dolbow, and Belytschko 1999 [8]) it has been widely applied to
numerous solid mechanics problem such as 2-, and 3-dimensional crack growth problems](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-7-2048.jpg)
![8
presented by Sukumar (2003) [23]. The XFEM also attains great simplicity of simulation for
interface problems like fluid-solid interaction to prevent computations that were formerly
tedious.
The enriched basis is formed by the combination of the nodal shape functions associated with
the mesh and the product of nodal shape functions with discontinuous functions. This
construction allows modeling of geometries that are independent of the mesh. Additionally, the
enrichment is added only locally i.e. where the domain needs to be enriched. The resulting
algebraic system of equations consists of two types of unknowns, i.e. standard degrees of
freedom and enriched degrees of freedom. Furthermore, the incorporation of enrichment
functions using the notion of partition of unity ensures the consistency of the solution. All the
above features provide the method with distinct advantages over standard finite element for
modeling arbitrary discontinuities.
1.2. Computational Fracture Mechanics
Of critical importance in computational fracture mechanics is the determination of the
parameters which characterize the stress and displacement field in the vicinity of the crack tip
or of the interface zone. For strong discontinuities, if the stress intensity factors exceed the
critical value of the material, crack growth and ultimately structural failure are possible. Several
strategies have been developed to extract mixed-mode intensity factors using contour integrals
derived from conservation laws. Moran (1987) [17] casts the essential issues in the general
framework of deriving domain integrals from momentum and energy-balance. The equivalent
domain integrals are viewed to be better suited for finite element calculations, as the same
Gauss quadrature points used for the construction of the bilinear form can be used to evaluate
the domain integrals.
A re-meshing technique is traditionally used for modeling discontinuities within the frame-work
of the finite element method. This is done near the discontinuity to align the element edges
with the boundary of discontinuity. This turns to be very expensive in computation only if the
discontinuity evolves in time, which would require generating a new mesh for each time
refinement. This leads to the construction of new shape functions and all the calculations have
to be repeated. Furthermore, the approximation solution is built on a history of previous states,
and whenever the mesh is changed, this history must be preserved. This is accomplished by
interpolation of data from old mesh to new mesh. The process of mapping variables from old
mesh to the new mesh comes with a loss of accuracy.
The idea of enriching the field with an analytical solution in the context of evolving
discontinuities was utilized by Gifford and Hilton (1978) [21], the displacement approximation
for an element was considered to be combination of the usual FEM shape function](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-8-2048.jpg)
![9
displacement and the enriched displacement i.e. 𝑢 = 𝑢 𝑠𝑡𝑑 + 𝑢 𝑒𝑛𝑟 . The enriched part comes
from the displacement in the vicinity of discontinuity. The general idea of enriching the
approximation field was presented in Global-Local methodologies. The basic idea is aimed
towards reaching a global solution using a coarse grid of finite elements and then detailed
results are obtained by zooming to an area of interest (localization zones etc), refining the mesh
in the interest region and using the displacements from the global analysis as an input for the
refined mesh.
The work of Belytschko et al. (1998) [12] is one of the pioneering works toward the local
enrichment of the approximation field at an element level for the localization problems. His
work modified the strain field to get the required jumps in the strain field within the frame-
work of three-field variational principle. The three fields are the displacement 𝒖, strain 𝜖 and
the stress 𝜎. Embedded finite element method (EFEM) uses an element enrichment scheme,
where the field is modified or enriched within the framework of the three-field variational
principle. The enriched approximation to the field in generic from can be expressed as
𝒖 ≈ 𝑵 𝑠𝑡𝑑 𝒅 + 𝑵 𝑒𝑛𝑟 𝒅 𝑒 and 𝜖 ≈ 𝑩 𝑠𝑡𝑑 𝒅 + 𝑩 𝑒𝑛𝑟 𝒅 𝑒, where 𝑵 𝑠𝑡𝑑 and 𝑩 𝑠𝑡𝑑 are the standard FEM
displacement interpolation and strain-displacement interpolation matrices and 𝒅 are the FEM
standard degrees of freedom. 𝑵 𝑒𝑛𝑟 and 𝑩 𝑒𝑛𝑟 are the matrices containing enrichment terms for
the displacement and strain fields. 𝒅 𝑒 is the enriched degree of freedoms and are unknown.
These unknowns are found by imposing Drichlet and Neuwman boundary condition within the
element. The prominent feature in this method is that the enrichment is localized to an
element level. However, this method has a drawback the requirement of continuity along the
path of the crack. Extended finite element method (XFEM) on the contrary is also a local
enrichment scheme but uses the notion of partition of unity to incorporate an enrichment into
the approximating field. In XFEM, instead of an element enrichment scheme, a nodal
enrichment scheme is developed. A prominent feature of the partition of unity in XFEM or in
any partition of unity method is that it automatically enforces the conformity of the global
approximation space.
Extended finite element method (XFEM) introduced by Belytschko and Black (1999) [12] is able
to incorporate the local enrichment into the approximation space within the framework of
finite elements. The resulting enriched space is then capable of capturing the non-smooth
solutions with optimal convergence rate. The main scope of this thesis is to confirm the
convergence rate ratio obtained with XFEM in the case of the unavailability of the analytical
exact solution this is known as a posteriori error estimation.
The partition of unity finite element method (PUFEM) [14] defines set of functions over certain
domain 𝛺 𝑃𝑈𝐹𝐸𝑀
, such that they form a partition of unity, or in other words they sum up to 1.
This property lays on the basic rules of proposition for XFEM, and it corresponds to the ability of](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-9-2048.jpg)
![10
the partition of unity shape functions to reproduce a constant, and this is essential for
convergence. The main idea of XFEM (or any partition of unity based method) lies in applying
the appropriate enrichment functions locally in the domain of interest using the partition of
unity. The XFEM brings the capability of tracking the discontinuity with coupling to level set
method. Level set method is a numerical technique to track the discontinuities. It is based on
the idea of defining a function such that the discontinuity is represented as the contour of the
zero level set function. Level set function not only helps in tracking arbitrarily aligned finite
element meshes but also helps in defining the enrichment function.
1.3. A Posteriori Error Estimation in Finite Element Analysis
After the advent of finite element method in the era of numerical simulation and mechanics, it
always brings the concern of error in calculations. Basically, there are two types of error
estimation procedures available. So called a priori error estimators provide information on the
asymptotic behavior of the discretization errors but are not designed to give an actual error
estimate for a given mesh. In contrast, a posteriori error estimators employ the finite element
solution itself to derive estimates of the actual solution errors. Numerical error is intrinsic in
mathematical simulation. No matter how sophisticated the mathematical model of an event is,
it is always subject to error. Discretization error can be large, pervasive, unpredictable by
classical heuristic means, and can invalidate numerical prediction. For these reasons, a
mathematical theory for estimating and quantifying discretization error is of paramount
importance to the computational solution. More importantly, knowledge of approximation
errors in simulation, as well as their distribution and magnitude provides the basis for adaptive
control of the numerical process, the meshing. This includes the choice of algorithms, and
consequently influences the efficiency and the feasibility of the computation. Advances have
been made to find the resolution on the above-mentioned problems a posteriori error
estimation. Besides, the analyst can use a posteriori error estimates as an independent
measure of the quality of the simulation under study, whereby the computed solution itself is
used to assess the accuracy.
These are further differences between the a priori estimation of error and the a posteriori error
estimation. The a priori error estimates give information on the convergence and stability of
various solvers and can give rough information on the asymptotic behavior of errors in
calculations as mesh parameters are appropriately varied. A posteriori error estimation is much
more useful in computational mechanics and in solving partial differential equations. These are
typified by particular algorithms in which the difference in solutions obtained by schemes with
different orders of truncation error is used as a rough estimate of the error. Babuska and
Rheinboldt [19] started the modern definition of a posteriori error estimation for finite element
methods for two point elliptic boundary value problems. Techniques were developed that](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-10-2048.jpg)
![11
delivered numbers ƞ 𝑘 approximating the error in an energy norm on each finite element K.
These formed the basis of adaptive meshing procedures designed to control and minimize the
error.
During the early 1980s several error estimators were introduced for effective adaptive
methods, of which many were based on a priori or interpolation estimates. They provided
crude but effective indications of the error, sufficient to derive adaptive processes. In the mean
time, Zienkiewicz and Zhu [27] developed a simple error estimation technique that is effective
for some classes of problems and types of finite element approximations. Their method is
categorized as a recovery-based method. Gradients of solutions obtained on a particular
partition are smoothed and then compared with the gradients of the original solution to assess
error. Eventually this approach evolved into the superconvergent patch recovery method. The
main scope of a posteriori estimator implementation for this work relies on SPR method, and it
has been expanded to estimate the local error in each element. The estimate is validated by the
effectivity index for either one- or two-dimensional problem.
Extrapolation methods have been used effectively to obtain global error estimates for both the
h and p versions of finite element method [10]. Most studies have dealt with a posteriori error
estimation for the h version of the finite element method. However, the element residual
method is applicable to both p and h-p version finite element approximations. Generally, the
emphasis of a posteriori error estimation runs around the study of robustness of existing
estimators and indentifying limits on their performance. Generally, the main purpose of an
error estimator is to provide an estimate and ideally bounds for the solution error in a specified
norm or in a functional of interest. Some characteristics of an effective error estimator include:
The error estimate should be accurate in the sense that the predicted error is close to
the actual (unknown) error.
The error estimate should be asymptotically correct in the sense that with increasing
mesh density the error estimate should tend to zero at the same rate as the actual
error.
Ideally, the error estimators should yield guaranteed and sharp upper and lower bounds
of the actual error.
The error estimator should be computationally simple, with the error estimate (and
bounds) inexpensive to compute when measured on the total computations of the
analysis.
The error estimator should be robust with regard to a wide range of applications,
including nonlinear analysis.](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-11-2048.jpg)

![14
𝑓 𝑥 = 2. 𝑥 (1.4)
If the cross section area for the first segment of bar is 1
2 and for the second part is 1, and the
module of elasticity along the bar is 1, then the exact solution is given by
𝑈 𝑥 =
2
3
∗ 𝑥3
0 < 𝑥 < 0.5 (1.5)
𝑈 𝑥 =
1
3
∗ 𝑥3
+
1
24
0.5 < 𝑥 < 1.0 (1.6)
Note that the displacement is continuous for each point along the bar.
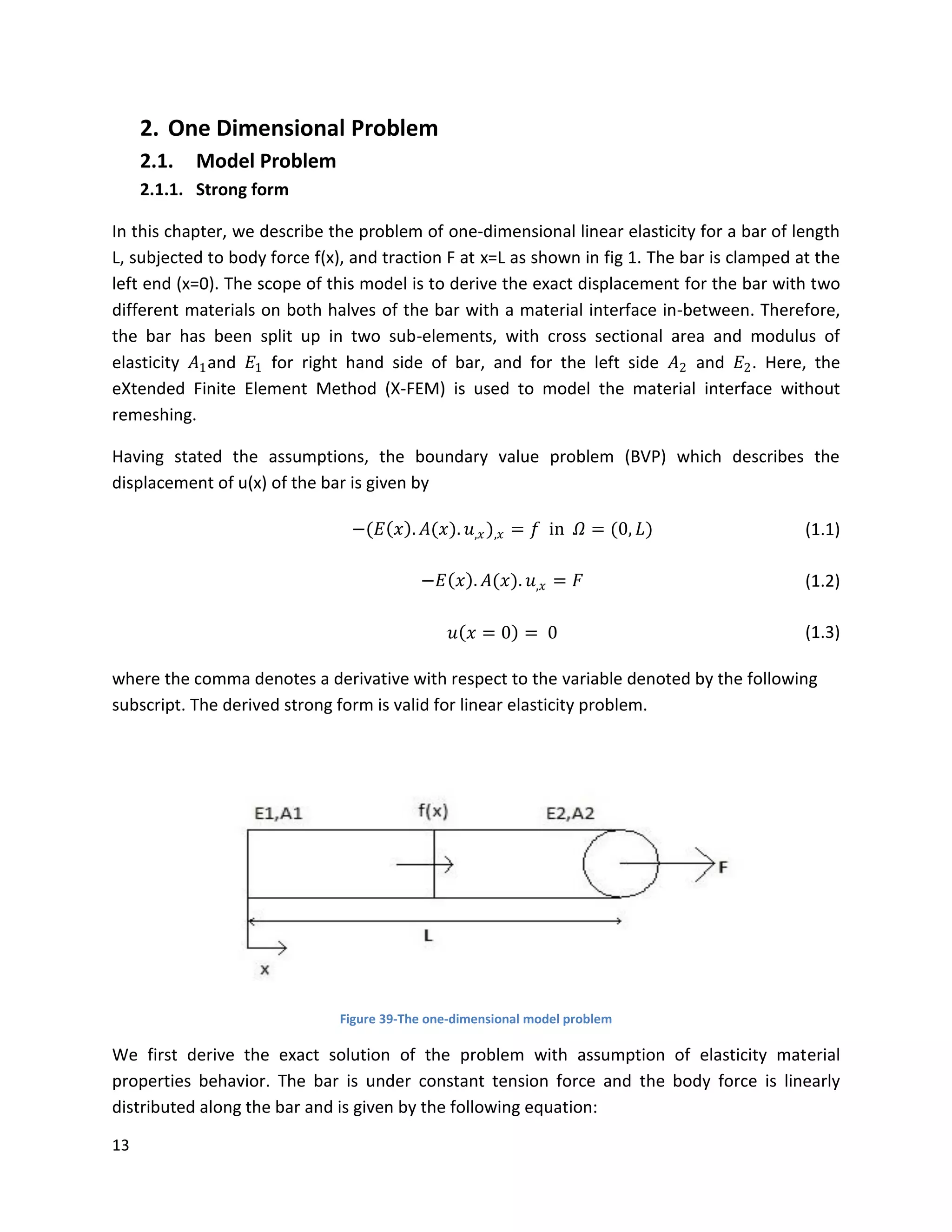
2.1.2. Weak form and discrete system
Consider the static response of elastic bar of two different cross sections such as shown in
fig1. The strong form (2.1) sets in body 𝛺 ∈ ℝ3
with boundary Ƭ is given as:
𝑑
𝑑𝑥
𝐸 𝑥 𝐴 𝑥
𝑑𝑢
𝑑𝑥
+ 𝑓 = 0 𝑜𝑛 0 < 𝑥 < 𝑙 (1.7)
As it has been described before, the investigated problem contains the constant module
elasticity; as well as two different cross sectional area joined in the interface location known
as notation of 𝐴1 and 𝐴2 for right and left hand side of interface location, respectively. The
strong form can be developed into the finite element equations by restating the partial
differential equation in an integral form called the weak form (principle of virtual work). To
show how the weak form is developed, the previous strong form equation (2.7) is multiplied
by a weight or test function 𝑤(𝑥) and integrating over the whole domain which is the
interval [0, 𝑙].
𝑤
𝑑
𝑑𝑥
𝐸𝐴(𝑥)
𝑑𝑢
𝑑𝑥
𝑑𝑥 + 𝑤𝑓 𝑑𝑥 = 0
𝑙
0
𝑙
0
∀𝑤 ∈ 𝛺 (1.8)
where 𝑢 𝑥 ∈ 𝛺
and 𝑤 ∈ 𝛺
are the approximating trial and test functions used in XFEM.
The 𝛺
contains both the enriched and standard finite element space that the trial function
must satisfy the essential boundary condition, and which include the shape functions that
are discontinuous across the interface location.
To obtain the weak form, we take the advantage of integration by parts for the first
component of equation (2.8) to relate the strong form to the weak form. By the application
of integration by parts the first component of formula (2.8) is expanded and written as:](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-14-2048.jpg)
![15
𝑤
𝑑
𝑑𝑥
𝐴 𝑥 𝐸
𝑑𝑢
𝑑𝑥
𝑑𝑥 = 𝑤𝐴 𝑥 𝐸
𝑑𝑢
𝑑𝑥
𝑙
0
𝑙
0
−
𝑑𝑤
𝑑𝑥
𝐴(𝑥)𝐸
𝑑𝑢
𝑑𝑥
𝑑𝑥
𝑙
0
(1.9)
Now with substitution of (2.9) into (2.8), it would be written as follows:
𝑤𝐴 𝑥 𝐸
𝑑𝑢
𝑑𝑥
𝑙
0
−
𝑑𝑤
𝑑𝑥
𝐴(𝑥)𝐸
𝑑𝑢
𝑑𝑥
𝑙
0
𝑑𝑥 + 𝑤𝑓 𝑑𝑥 = 0
𝑙
0
(1.10)
The formula (2.10) could be written by expansion of the first term:
(𝑤𝐴2 𝐸
𝑑𝑢
𝑑𝑥
) 𝑥=𝑙 − (𝑤𝐴1 𝐸
𝑑𝑢
𝑑𝑥
) 𝑥=0 −
𝑑𝑤
𝑑𝑥
𝐴(𝑥)𝐸
𝑑𝑢
𝑑𝑥
𝑙
0
𝑑𝑥 + 𝑤𝑓 𝑑𝑥 = 0
𝑙
0
(1.11)
The second term in the above vanishes because of the essential boundary condition. Also,
the (𝐴2 𝐸
𝑑𝑢
𝑑𝑥
) 𝑥=𝑙 stands as traction boundary condition. Therefore, the above equation
could be rewritten as follows:
𝑑𝑤
𝑑𝑥
𝐴(𝑥)𝐸
𝑑𝑢
𝑑𝑥
𝑙
0
𝑑𝑥 = (𝑤𝐴2 𝐸
𝑑𝑢
𝑑𝑥
) 𝑥=𝑙 + 𝑤𝑓 𝑑𝑥
𝑙
0
(1.12)
Because of the changing in cross sectional area of bar, the computation for the weak form is
broken up the general formulation of the weak form (2.8) into two compartments in
according to the location of interface. The weak form equation would be derived as
following equations: [put A = a1, a2]
𝑑𝑤
𝑑𝑥
𝑙
2
0
𝐴1. 𝐸
𝑑𝑢
𝑑𝑥
𝑑𝑥 = (𝑤𝐴1. 𝐸
𝑑𝑢
𝑑𝑥
) 𝑙
2
+
𝑤𝑙2
4
(1.13)
𝑑𝑤
𝑑𝑥
𝐴2. 𝐸
𝑑𝑢
𝑑𝑥
𝑑𝑥
𝑙
𝑙
2
= (𝑤𝐴2 𝐸
𝑑𝑢
𝑑𝑥
)𝑙 − (𝑤𝐴2 𝐸
𝑑𝑢
𝑑𝑥
) 𝑙
2
+
3𝑙2
4
𝑤 (1.14)
2.2. Finite Element Solution
The basic characteristic of finite element procedure is determined by the basis functions;
particularly their piecewise smoothness and local support of at least degree 1. In the global
point of view, these basis functions are considered to be defined everywhere on the domain of
the boundary-value problem. The global coordinates are useful in establishing the
mathematical properties of the finite element method. However, the computer](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-15-2048.jpg)
![16
implementation is being carried out on a reference element which is determined by local
coordinates.
The approximated solution 𝑢
is obtained by Galerkin method as a Variational Boundary Value
Problem (VBVP) restricted to the local domain. Each local domain is constructed by partitioning
of the global domain Ω into a set of m subdomains, labeled elements in fig…. Nodes are then
placed at the vertex of each element, for a total of n nodes in the domain. The coordinates of
the nodes are denoted by 𝑥1, 𝑥2, … , 𝑥 𝑛 and the element domains are denoted by 𝛺1, 𝛺2, … , 𝛺 𝑚 .
Associated with each node is a shape function 𝑁𝑖 or 𝛷𝑖, with compact support 𝜔𝑖. The support
of the nodal function is defined to be the union of the elements connected to the node. Fig 2
shows a nodal shape function and its support on a typical one- dimensional mesh.
Figure 40-A typical one-dimensional mesh of 4 elements. A linear shape function in corresponding to node 3 with support of
shape function [1].
The finite element approximation in the global domain reads
𝑢
𝑥 = 𝑁𝑖(𝑥)𝑢𝑖
𝑛
𝑖=1
(1.15)
We can write the following properties:
The approximation 𝑢
interpolates the values 𝑢𝑖 of 𝑢 at nodes, i.e 𝑢
𝑥𝑖 = 𝑢𝑖 = 𝑢(𝑥𝑖)
The approximation is continuous, 𝑢
∈ 𝐶0(𝛺)
The approximation is exact for linear functions.
The interpolation property gives the physical meaning to the nodal coefficients 𝑢𝑖 as precisely
the values of the displacement field at the nodes. We shall provide a relation between the
domains of the global and local coordinates by linear function ξ : [𝑥 𝐴, 𝑥 𝐴+1] [𝜉1, 𝜉2], which
satisfies ξ(𝑥 𝐴)=𝜉1 and ξ(𝑥 𝐴+1)=𝜉2. It is standard practice to take 𝜉1=-1 and 𝜉2=+1. The local and
global descriptions of the eth element are depicted in fig 3.](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-16-2048.jpg)
![17
Figure 41-Interpolation between local and global coordinate system [2].
The linear order of the approximation comes with the fact that the shape functions satisfy
𝑁𝑖
𝑖
𝑥 = 1 (1.16)
𝑁𝑖 𝑥 𝑥𝑖 = 𝑥
𝑖
(1.17)
Hence, if the nodal values are prescribed for an arbitrary linear field, the finite element
approximation reproduces the field exactly. The above equations are indicating the reproducing
condition, with the first implying that shape functions form a partition of unity. This property
corresponds to the ability of the approximation to represent rigid body modes, and is closely
tied to the convergence of the method.
Concerning the construction of the stiffness matrix K and the force vector F, the integral over
the domain Ω (integration over all elements) are replaced by a sum of integrals over each](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-17-2048.jpg)
![19
Φ(x) > 0 right side of interface coordination
For each node 2 degree of freedom are allocated. One is dedicated to standard finite element
method, while the other one is spared to be implied for element with discontinuity.
In this code the basic idea of XFEM is implemented with several types of enriched shape
functions. These functions are built as the product of global enrichment functions with some
finite element shape functions. The point x is taken as an arbitrary value in the finite element e.
Denote the element’s nodal set as 𝑁𝑒 = {𝑛1 , 𝑛2 , … , 𝑛 𝑚 𝑒
}, where 𝑚 𝑒 is the number of nodes of
element e. The enriched displacement approximation for a vector-valued function 𝒖
∶ 𝑅 𝑑
→
𝑅 𝑑
is of the form
𝑢
= 𝑁𝐼
𝐼∈𝑁 𝑒
𝑥 𝑢𝐼 + 𝑁𝐽
𝐽∈𝑁 𝑒𝑛𝑟
𝑥 𝛹(𝑥)𝑎𝐽 (1.19)
Where the 𝑁 𝑒𝑛𝑟
is set of nodes whose support is cut by discontinuity, and 𝑁𝑒 is set of nodes
that are not enriched. 𝑁𝐼 and 𝑁𝐽 are finite element shape functions. The choice of enriched
function (Ψ(x)) depends on a priori solution of the problem. The 𝑢𝐼 is the nodal unknown as
well as 𝑎𝐽 for standard finite elements and enriched elements, respectively. 5 different types of
these functions have been implemented in this code, and subsequently the intrinsic estimated
error for each approximated solution is compared.
Moreover, for those enriched shape functions that brings an additional term in approximated
solution, the enriched function is shifted according to the value of the enriched function in
corresponding node. The modified approximation becomes:
𝒖
= 𝑁𝐼
𝐼∈𝑁 𝑒
𝑥 𝒖𝐼 + 𝑁𝐽
𝐽∈𝑁 𝑒𝑛𝑟
𝑥 (𝛹 𝑥 − 𝛹 𝑥𝐽 )𝑎𝐽 (1.20)
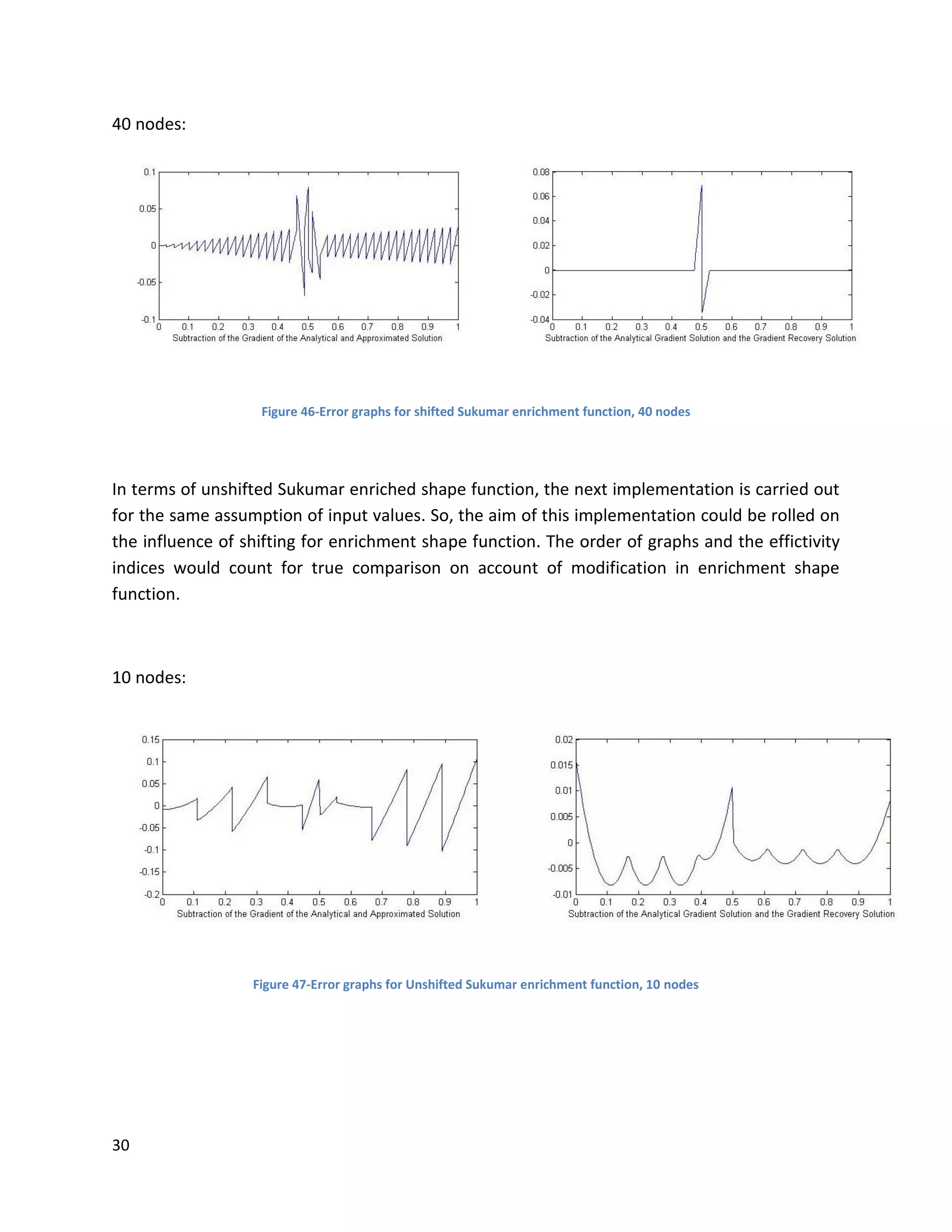
The first choice of enriched shape function is suggested by Sukumar [24], known as the signed
distance shape function. The second type is shifted version of this enrichment. The equation for
Sukumar enrichment is
𝛹 𝑥 = 𝛷(𝑥) (1.21)
and the shifted enrichment is
𝛹 𝑥 = 𝛷(𝑥) − 𝛷(𝑥𝑖) (1.22)
Both of these enriched shape function however, lead to issues with the blending between the
enriched and unenriched elements. The existence of blending elements imposes extra error in](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-19-2048.jpg)
![20
approximated solution, as a result deteriorate the convergence rate. It all comes through two
main properties of blending elements: i) In these elements, the enrichment function can no
longer be reproduced exactly (because of a lack of a partition of unity). ii) These elements
produce unwanted terms into the approximation which cannot be compensated by standard FE
part of the approximation. Hence, Prof. Moes [4] and his co-workers used a new enriched
shape function which is able to eliminate the problems in the blending elements with the
enhancement of geometrical configuration and extra degree of freedom. The modified
equation of this enriched function is given by an interpolation of nodal values minus the
absolute value of the common ramp function, illustrated as:
𝛹 𝑥 = 𝑁. 𝛷(𝑥𝑖) − 𝛷(𝑥) (1.23)
where N denotes to standard shape function.
As could be perceived at the end of this chapter, this enriched shape function leads to the most
optimal enrichment among the other implemented enriched shape functions.
Another special treatment was proposed to eliminate the unwanted terms by Prof.Fries [3].
This new approached is known as modified or corrected XFEM, whereas the original definition
is called standard XFEM. Two significant differences can be found in the approximation of the
standard and corrected XFEM: i) In addition to those nodes that are enriched in the standard
XFEM, all nodes in the blending elements are enriched. That is, a complete partition of unity is
present in the reproducing and blending elements. ii) The enrichment functions of the standard
XFEM are modified except in the reproducing elements. These are element with all nodes being
enriched that are capable of reproducing the enriched function exactly. The enrichment
functions are zero in the standard FEs, and in the blending elements, they are multiplied by a
function that varies continuously between 0 and 1.(also called a ramp function) With the aid of
corrected XFEM there are no more unwanted terms in the blending elements.
The modified enrichment function is defined with 𝛹 𝑚𝑜𝑑
(x) as
𝛹 𝑚𝑜𝑑
𝑥 = 𝛹 𝑥 . 𝑅(𝑥) (1.24)
With R(x) being a ramp function
𝑅 𝑥 = 𝑁𝑗 (𝑥)
𝑗∈𝑁 𝑒𝑛𝑟
(1.25)](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-20-2048.jpg)

![23
In order to calculate the energy norm, the gradient of both true and approximated solution is
considered. An a priori error estimator in energy norm is:
𝑢 − 𝑢 𝐸
2
= ∇𝑢 − ∇𝑢
2
𝑑𝑥 ≤ 𝐶 𝑝
𝑢 𝑃+1
(1.30)
As it could be seen from two former equations, the accuracy of the approximation in 𝐿2
norm is
one power of h higher than energy norm of the error. The estimation of the error depends on
the unknown constant e and the term 𝑢 𝑃+1 which in general is also not known. To get an
error estimator that does not depend on unknown constants, we need to study a posteriori
error estimators, which are based on the approximated solution itself.
A reasonable a posteriori error estimator can be obtained by using a suitable approximation to
the gradient in place of ∇𝑢. In particular, the gradient of the exact solution could be
approximated by a suitable post-processing of the finite element approximation, denoted by
𝐺 [𝑢 ].
The a posteriori error estimator is then simply taken as
ƞ2
= 𝐺 − ∇𝑢
2
𝑑𝑥 (1.31)
This approach allows considerable leeway in the selection of the post-processed gradient, as it
has already been mentioned the gradient of the finite element approximation provides a
discontinuous approximation to the true gradient. One possible approach that overcomes this
problem is the use of averaging methods. The idea is to construct an approximation at each
node by averaging the contribution from each of the elements surrounding the node. These
values may then be interpolated to obtain a continuous approximation over the whole domain.
The specific steps used to construct the averaged gradient at the nodes distinguish the various
estimators and have a major influence on the accuracy and robustness of the resulting
estimator. The several available rigorous approaches for computation of estimators lay within
the framework of corresponding to a particular recovered gradient 𝐺𝑥.
The implementation of the gradient recovery will be elaborated in several steps. The first step is
to define the procedure for smoothing the gradient of the finite element approximation. The
recovered gradient is denoted by 𝐺 (𝑢 ), where 𝑢 is the finite element approximation. The
recovered gradient is itself piecewise linear, with values at the nodes obtained by first
interpolating the gradient of the finite element approximation at the centroids of the elements
sharing the node. In each element 𝐾 the estimator is defined as](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-23-2048.jpg)

![25
The quality of an estimator is often judged by global effectivity indices
𝜃 =
ƞ
𝑒
or local effectivity indices
𝜃 𝑘 =
ƞ 𝑘
ƞ 𝑘
These indices can be used to measure the quality of an estimator when the exact error or a
good approximation of it are known. The comprehension of previous concepts gives the rule of
the error estimator implementation for post-processing finite element belonged to one
dimensional problem code. Its whole orientation can be summarized in following figure:
Figure 42-Construction of recovery operator 𝑮 𝒉 from piecewise linear approximation in one dimension [9].](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-25-2048.jpg)


![46
𝛷 𝑥 𝑡 , 𝑡 ≤ 0 (3.15)
𝛹 𝑥 𝑡 , 𝑡 = 0 (3.16)
The defined level set function goes for closed domain like as fig….
Figure 64-Example of a signed distance function for a closed domain [15].](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-46-2048.jpg)
![47
Figure 65-Example of a signed distance function for an open section [15].
The general implementation form of XFEM is similar to what has been described in 1-D;
nonetheless, it is expanded to one dimension higher. Here again by exploiting the partition of
unity finite element method (PUFEM), the discontinuities are simulated independent of finite
element mesh. The XFEM gives the viability to catch a non-smooth behavior of field variables,
such as stress across the interface of dissimilar materials or displacement across cracks, with
adding the enrichment functions to the displacement approximation as long as the partition of
unity is satisfied. Some additional degrees of freedom are introduced in all elements where
discontinuity is present, and due to type of enrichment functions, possibly some neighboring
elements which are known as blending elements.
In the XFEM the approximation takes the form
𝑢
= 𝑁𝐼(𝑥)
𝐼
[𝑢𝐼 + 𝑣 𝐽
(𝑥)
𝐽
𝑎𝐼
𝐽
] (3.17)
where 𝑢𝐼 are the classical finite element degrees of freedom (DOF), 𝑣 𝐽
𝑥 is the Jth
enrichment function at the Ith node, and 𝑎𝐼
𝐽
are the enriched DOF corresponding the Jth
enrichment function at the Ith node. On owing to introduction of enrichment functions into
approximation solution, the additional calculations are required to calculate the physical
variable, and hence the interpolation property does not satisfy in straight step, 𝑢𝐼 = 𝑢
(𝑥𝐼).](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-47-2048.jpg)
![48
The interpolation property is important in practice in applying boundary or contact conditions.
Therefore, it is common practice to shift the enrichment function such that
𝛾𝐼
𝐽
𝑥 = 𝑣 𝐽
− 𝑣𝐼
𝐽
(𝑥) (3.18)
where 𝑣𝐼
𝐽
𝑥 is the value of the Jth enrichment function at the Ith node. The shifted enrichment
function is able to satisfy 𝑢𝐼 = 𝑢
(𝑥𝐼) and assign a value of zero to all standard FEM nodes. The
shifted displacement approximation is given by
𝑢
= 𝑁𝐼(𝑥)
𝐼
[𝑢𝐼 + 𝛾𝐼
𝐽
(𝑥)
𝐽
𝑎𝐼
𝐽
] (3.19)
The Hook’s equation in linear elastic problem indicates the formulation as
𝒌𝒒 = 𝒇 (3.20)
where K is global stiffness matrix, q are nodal degree of freedom, and f are external forces. The
global stiffness matrix can be rearranged in order to
K=
𝒌 𝑢𝑢 𝒌 𝑢𝑎
𝒌 𝑎𝑢
𝑇
𝒌 𝑎𝑎
where 𝒌 𝑢𝑢 is the classical finite element stiffness matrix, 𝒌 𝑎𝑎 is enriched finite element stiffness
matrix, and 𝒌 𝑢𝑎 is a combination of the classical and enriched stiffness matrix components.
Each component of global stiffness matrix K is computed by the integration such as
𝑲 𝑒 = 𝑩 𝛼
𝑇
𝑪𝑩 𝛽 𝑑𝛺 𝛼, 𝛽 = 𝑢, 𝑎 (3.21)
where C is the constitutive matrix for an isotropic linear elastic material, 𝑩 𝑢 is the classical
strain-displacement matrix, and 𝑩 𝑎is the enriched strain-displacement matrix. Both strain-
displacement matrices are illustrated like
𝑩 𝑢 =
𝑁𝐼,𝑥 0 0
0 𝑁𝐼,𝑦 0
0 0 𝑁𝐼,𝑧
0 𝑁𝐼,𝑧 𝑁𝐼,𝑦
𝑁𝐼,𝑧 0 𝑁𝐼,𝑥
𝑁𝐼,𝑦 𝑁𝐼,𝑥 0
; 𝑩 𝑎 =
(𝑁𝐼 𝛾𝐼
𝐽
),𝑥 0 0
0 (𝑁𝐼 𝛾𝐼
𝐽
),𝑦 0
0 0 (𝑁𝐼 𝛾𝐼
𝐽
),𝑧
0 (𝑁𝐼 𝛾𝐼
𝐽
),𝑧 (𝑁𝐼 𝛾𝐼
𝐽
),𝑦
(𝑁𝐼 𝛾𝐼
𝐽
),𝑧 0 (𝑁𝐼 𝛾𝐼
𝐽
),𝑥
(𝑁𝐼 𝛾𝐼
𝐽
),𝑦 (𝑁𝐼 𝛾𝐼
𝐽
),𝑥 0](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-48-2048.jpg)
![49
where each matrix constitutes from derivative of either standard or enriched shape function
with respect to each corresponding axis.
It is going to be apparent that the shape function matrix contains the same number of columns
as in the strain-displacement matrix, whose components for the 4-node planar element is used
as in fig…
Figure 66-Physical and parent 4-node elements [5].
The shape functions 𝑁𝐼 (I from 1 to 4) are bi-linear in r and s (coordinates in the parent
element):
𝑁1 =
1
4
(1 − 𝑟)(1 − 𝑠) (3.22)
𝑁2 =
1
4
(1 + 𝑟)(1 − 𝑠) (3.23)
𝑁3 =
1
4
(1 + 𝑟)(1 + 𝑠) (3.24)
𝑁4 =
1
4
(1 − 𝑟)(1 + 𝑠) (3.25)](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-49-2048.jpg)
![50
The interpolation of the displacement or nodal DOF from parent element to physical element
with aid of shape functions are carried on as
𝑢 𝑒
𝑀 = 𝑁 𝑒
𝑀 𝑞 𝑒 (3.26)
As if
𝑁 𝑒
𝑀 = [𝑁𝑠𝑡𝑑
𝑒
𝑀 𝑁𝑒𝑛𝑟
𝑒
𝑀 ]
The q and f matrices are both identically given by
𝒒 𝑇
= {𝒖 𝒂} 𝑇
where u and a are vectors of the classical and enriched degrees of freedom and
𝒇 𝑇
= {𝒇 𝑢
𝑇
𝒇 𝑎
𝑇
}
where 𝒇 𝑢 and 𝒇 𝑎 are vectors of the applied forces for the classical and enriched components of
the global force matrix. The vectors 𝒇 𝑢 and 𝒇 𝑎 are given by calculation of tractions t and body
forces b over whole domain in the way as
𝒇 𝑢 = 𝑁𝐼 𝑡 𝑑Ƭ + 𝑁𝐼 𝑏 𝑑𝛺 (3.27)
and
𝒇 𝑎 = 𝑁𝐼 𝑡 𝛾𝐼
𝐽
𝑑Ƭ + 𝑁𝐼 𝑏 𝛾𝐼
𝐽
𝑑𝛺 (3.28)
The stress and strain should be calculated in the sense of consideration for realizing the
discontinuity. Therefore, the strain and stress may be computed as
𝜀 = 𝑩 𝑢 𝑩 𝑎 {𝑢 𝑎} 𝑇 (3.29)
and
𝜎 = 𝐶𝜀 (Constitutive Equation) (3.30)
3.2.1 Crack Enrichment Function
In general, XFEM is used to describe the discontinuity as either weak or strong. A strong
discontinuity can be considered one where both the displacement and strain are discontinuous,](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-50-2048.jpg)

![52
Figure 67-Selection of enriched nodes for 2D crack problem. Circled nodes are enriched by the step function whereas the
squared nodes are enriched by the crack tip functions. (a) on a structured mesh; (b) on an unstructured mesh [5].
The B-branch functions as crack tip enrichment functions in isotropic elasticity are provided
from the asymptotic displacement fields.
𝑩 ≡ 𝐵1, 𝐵2, 𝐵3, 𝐵4 = [ 𝑟 sin
𝜃
2
, 𝑟 cos
𝜃
2
, 𝑟 sin
𝜃
2
cos 𝜃 , 𝑟 cos
𝜃
2
cos 𝜃]
Here, r and 𝜃 are polar coordinates in the local crack tip coordinate system as shown in fig…
The first element of branch function represents the discontinuity near the tip, while the other
three functions help to get accurate result with relatively coarse meshes. It has not been
proved yet by adding higher order terms in the asymptotic expansion of the near-tip fields
substantially enhance the improvement of solution.](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-52-2048.jpg)
![53
Figure 68-Coordinate configuration for crack tip enrichment function [5].
Because the XFEM mesh does not need to conform to the domain, a method must be used to
track of the location of the cracks. Those mentioned level set functions are going to shed the
light to find the crack path. The zero level set of 𝛹(𝑥) represents the crack body, while the zero
level sets of 𝜑(𝑥), which is orthogonal to the zero level set of 𝛹(𝑥), represents the location of
the crack tips. The enrichment functions in terms of 𝜑(𝑥) and 𝛹(𝑥) can be noticed such as
𝑥 = 𝛹 𝑥 =
+1 𝑓𝑜𝑟 𝛹(𝑥) > 0
−1 𝑓𝑜𝑟 𝛹(𝑥) < 0
(3.34)
Furthermore, the polar crack tip coordinates are given as
𝑟 = 𝛹2 𝑥 + 𝛷2(𝑥) and 𝜃 = tan−1 𝛹(𝑥)
𝛷(𝑥)
The enrichment of nodes according to crack tip enrichment can also be determined through the
use of level set functions defining the crack. Consider an element where the maximum and
minimum values of 𝛹(𝑥) and 𝜑(𝑥) are given as 𝛹𝑚𝑎𝑥 , 𝛹 𝑚𝑖𝑛 , 𝛷 𝑚𝑎𝑥 , and 𝛷 𝑚𝑖𝑛 . Then an element
is enriched with the Heaviside enrichment when
𝛷 𝑚𝑎𝑥 <0 and 𝛹𝑚𝑎𝑥 𝛹 𝑚𝑖𝑛 ≤ 0](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-53-2048.jpg)

![57
Figure 69-Sub-triangulation of finite elements [6].
The MATLAB code was implemented for two-dimensional plane stress and plane strain
problems. The code is mainly developed for rectangular domain as structured grid of linear
square quadrilateral elements with arbitrary loading and boundary conditions. The enrichments
would be covered the homogenous crack, inclusion and void. All discontinuities are tracked
using level set method as well as calculation of enrichment functions. The 𝛷(𝑥) and 𝛹(𝑥) level
set functions track the crack, the χ(x) level set functions determine the boundary of void, and
the 𝜉(𝑥) level set function traces the inclusion. Integration of enriched elements is conducted
through the subdivision of elements into triangle regions.](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-57-2048.jpg)

![59
where the discontinuities are evaluated at the midpoint of the sides. The gradient recovery-
based estimator might seem to be too complicated to be of practical use. However, the Kelly
estimator may be viewed as a modified recovery operator by taking the values of the recovered
gradient at the vertices likewise fig…
Figure 70-Construction of recovered gradient at vertex of element K. The value at • is a linear combination of the values at o
using the weights indicated [9].](https://image.slidesharecdn.com/93377311-e16a-4bab-9909-0979dff6a332-160622121831/75/Master-Thesis-59-2048.jpg)