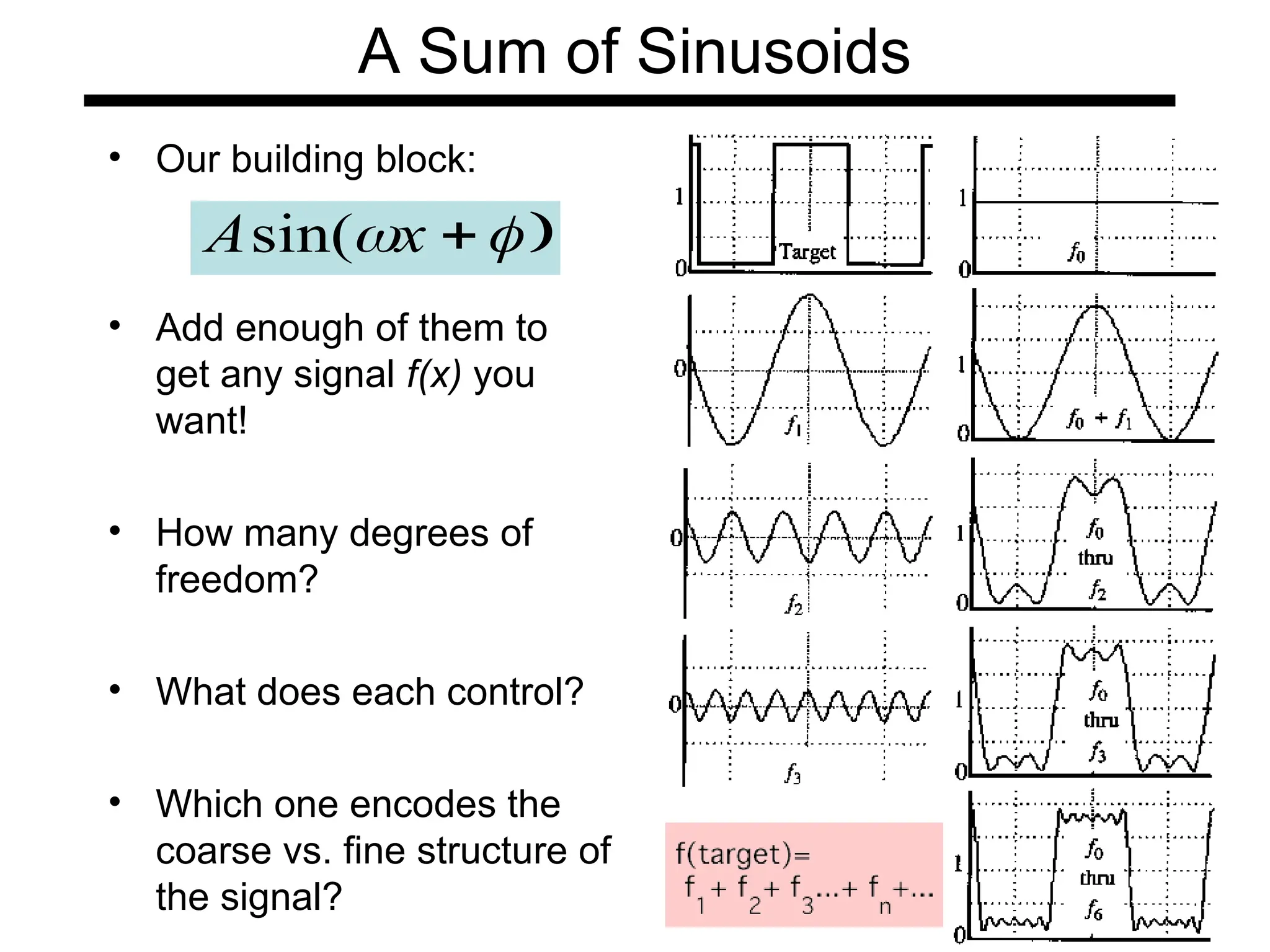
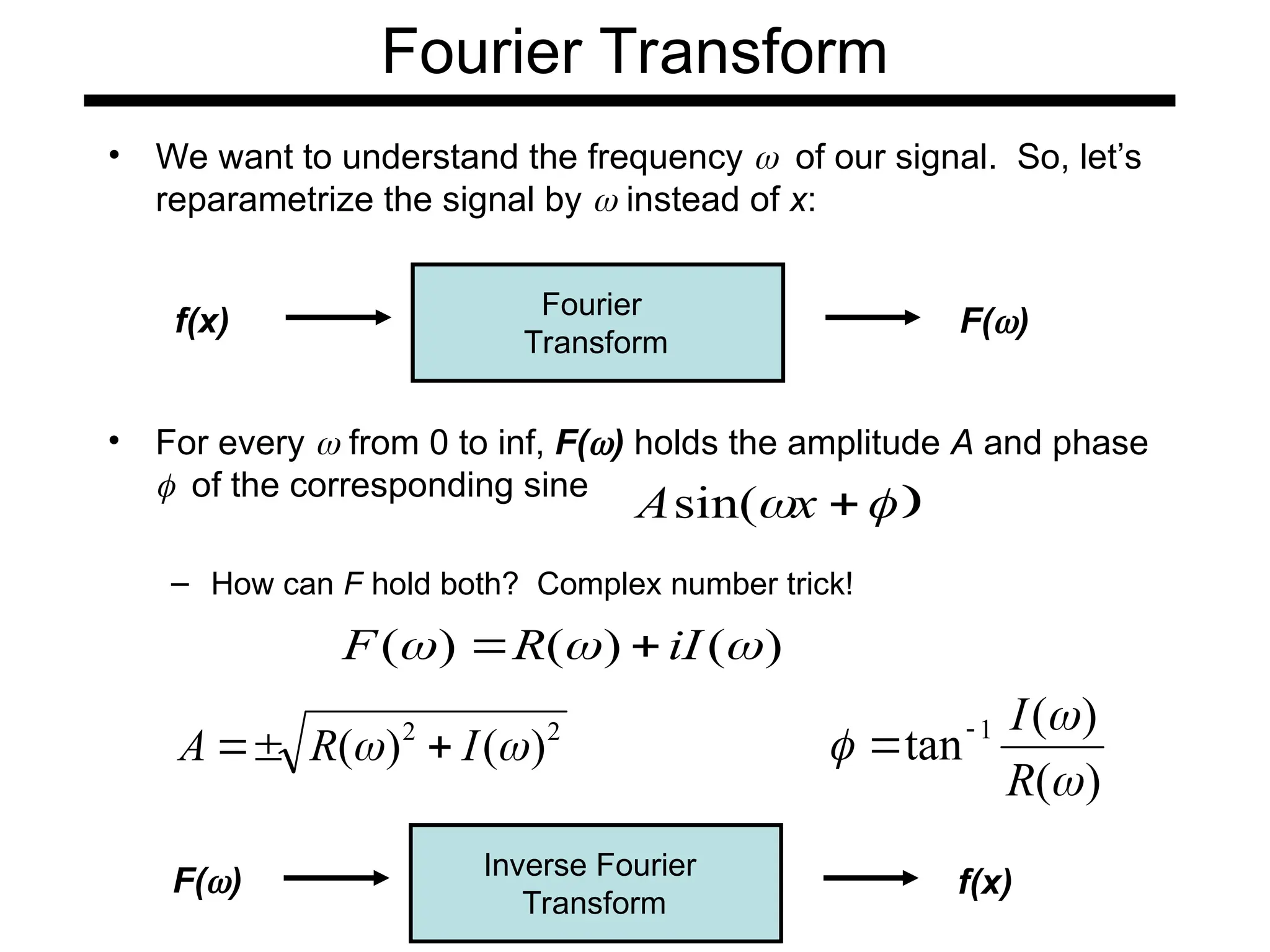
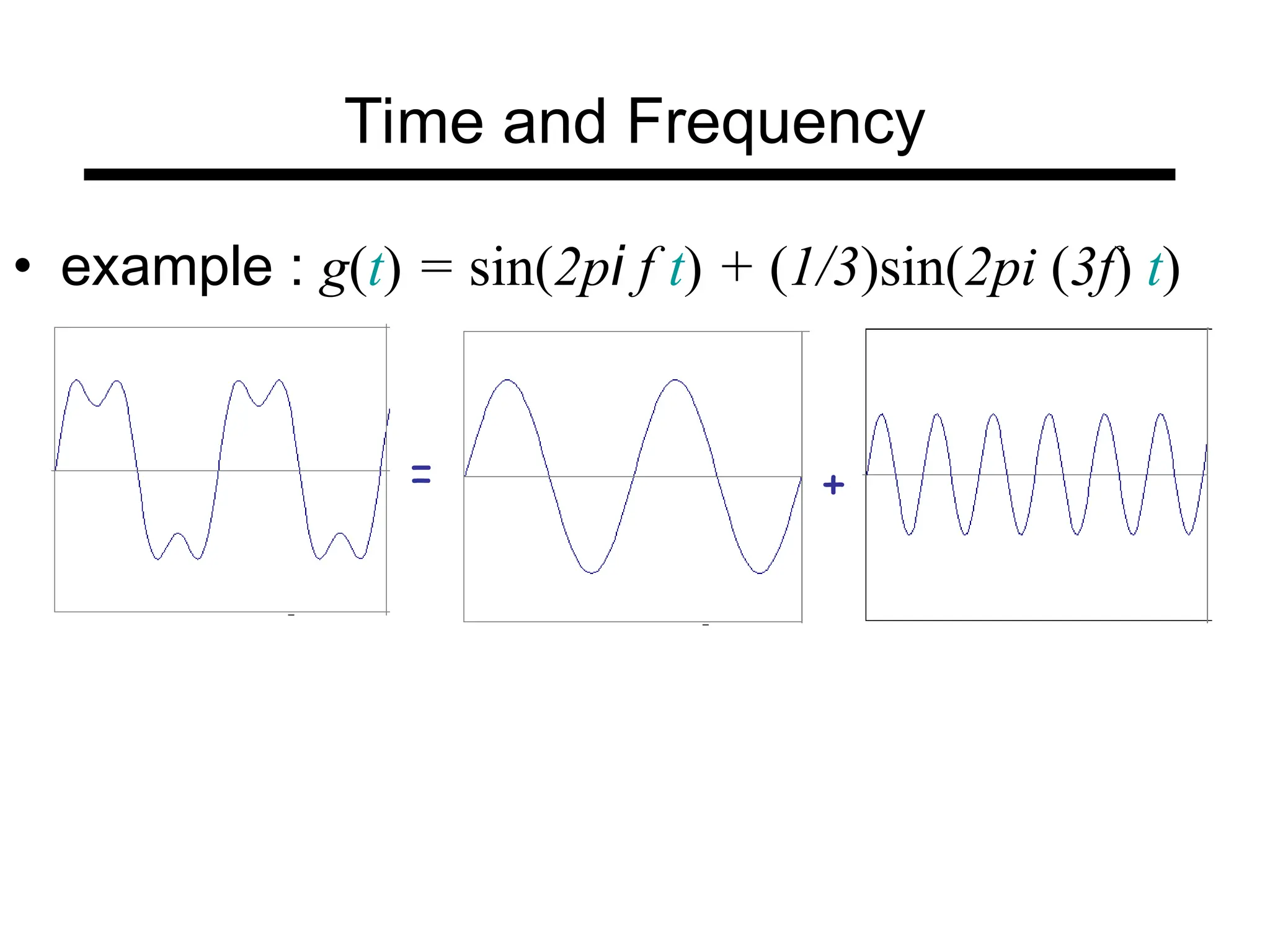
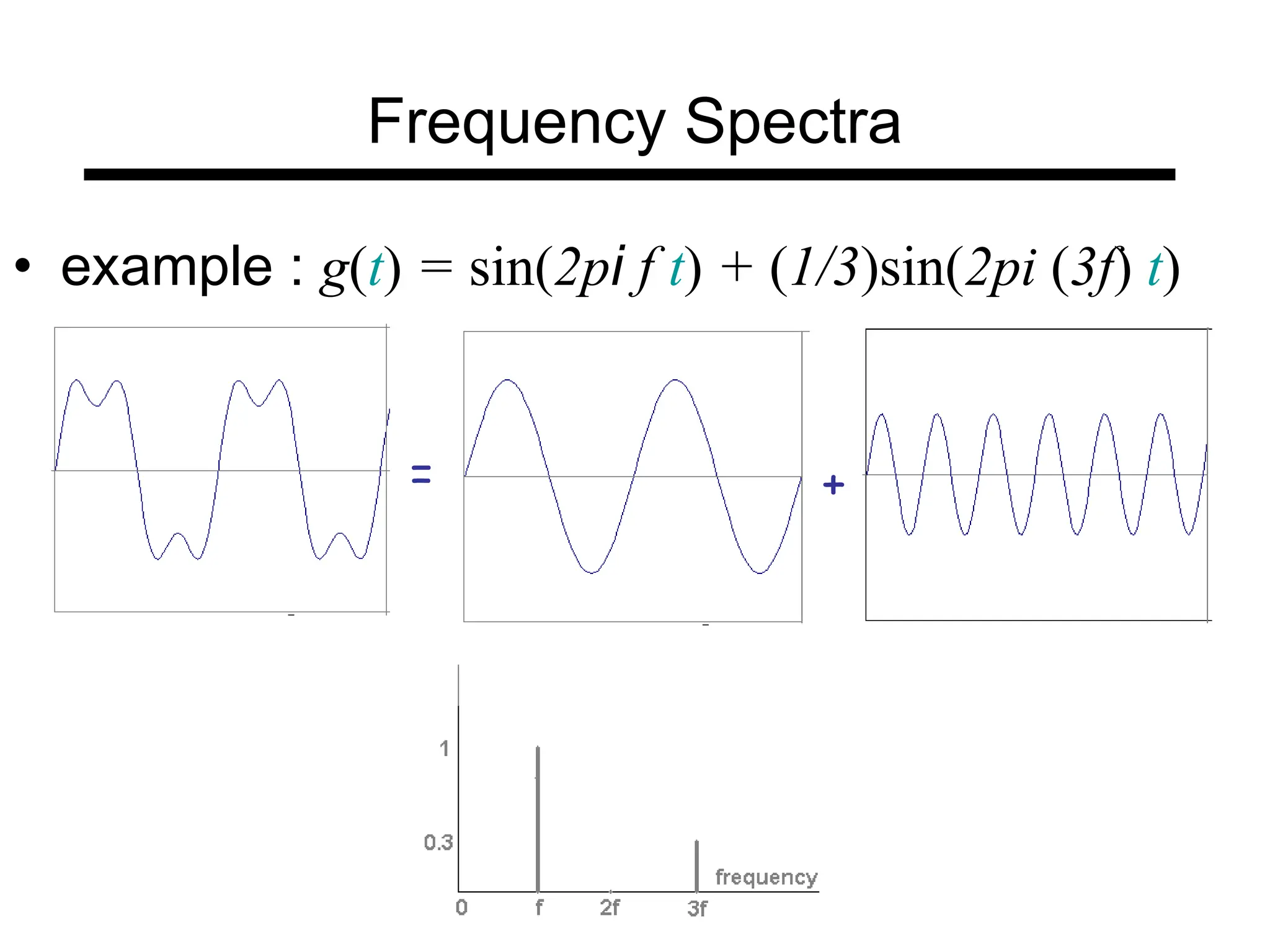
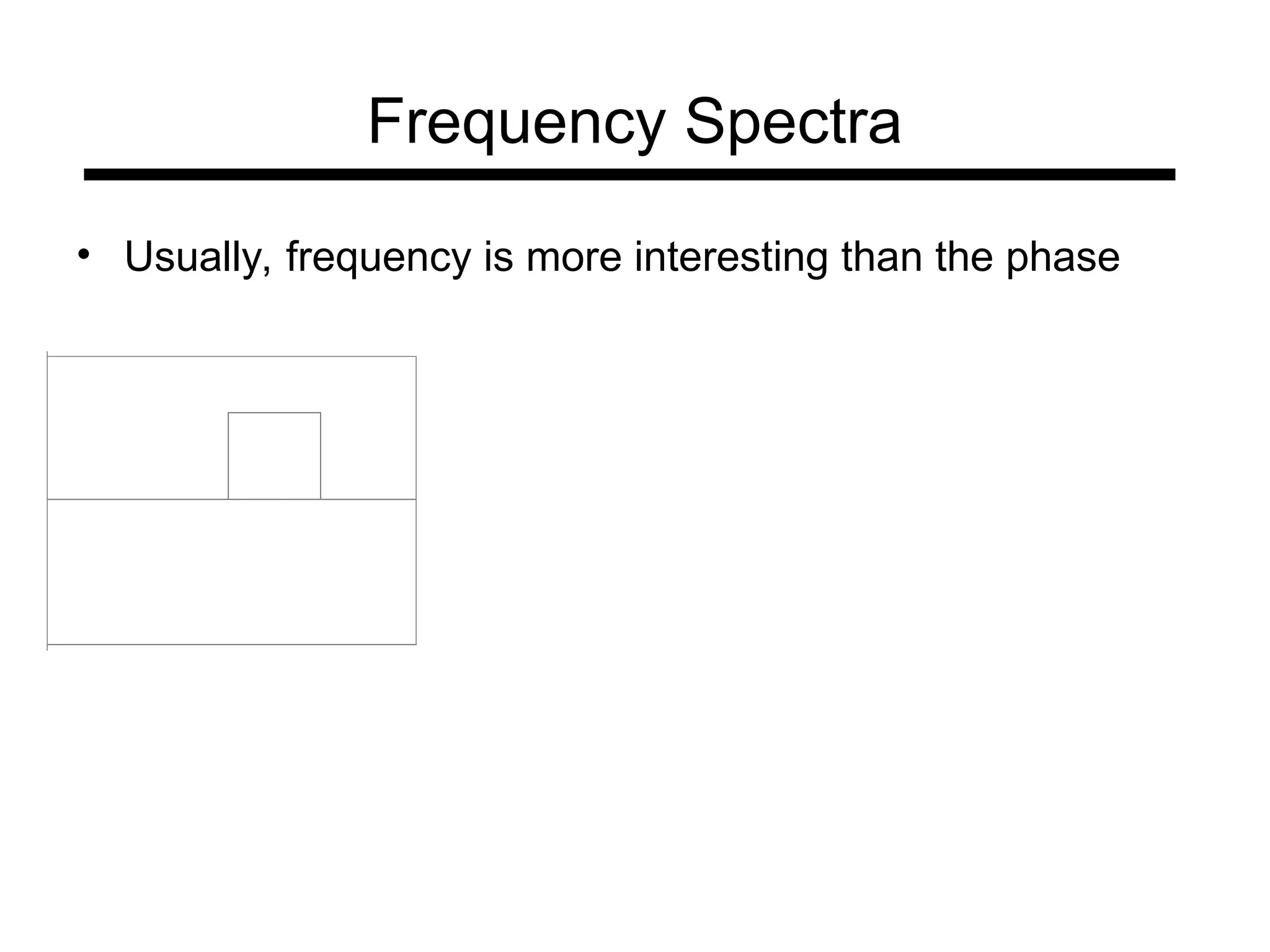
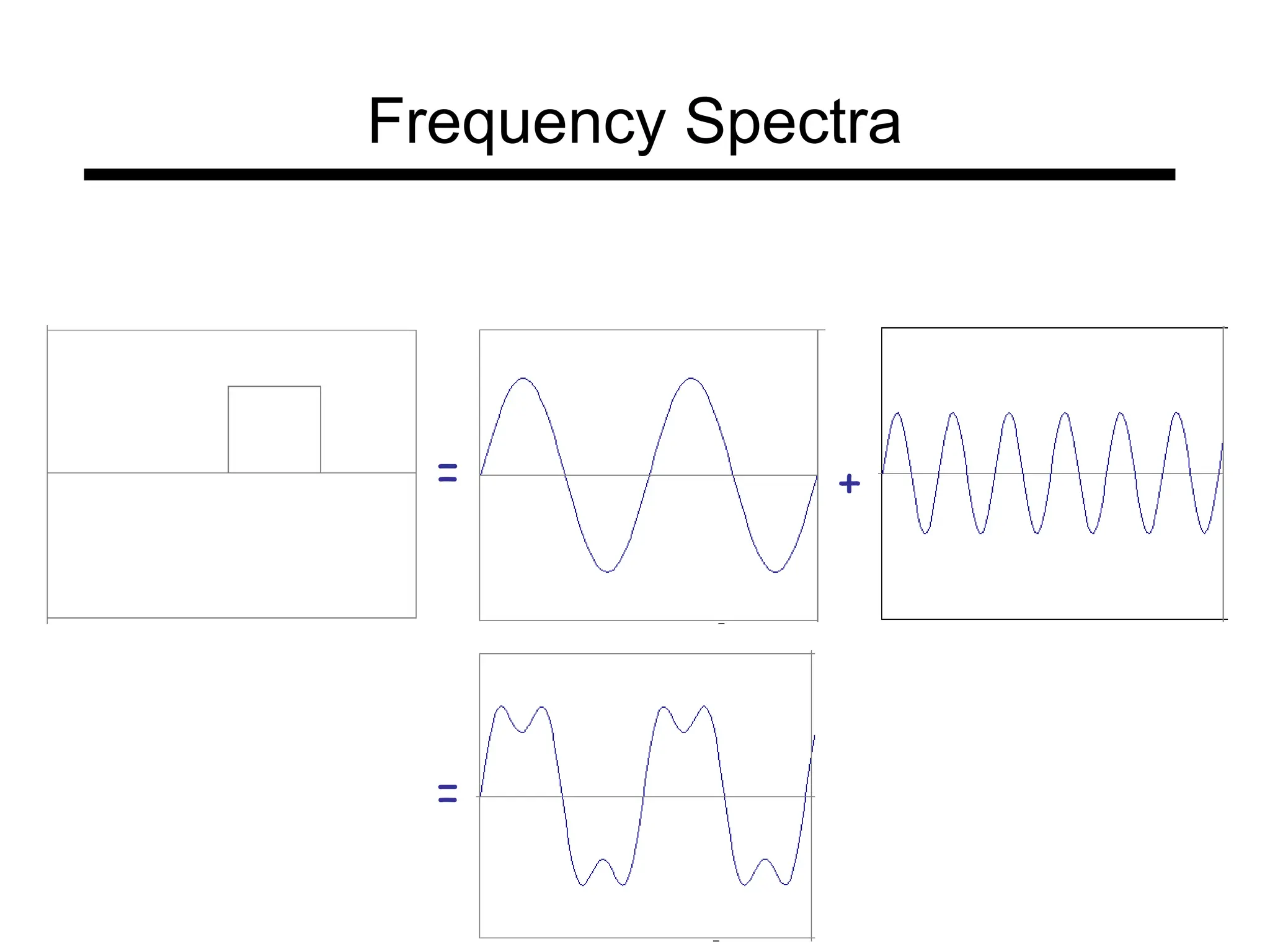
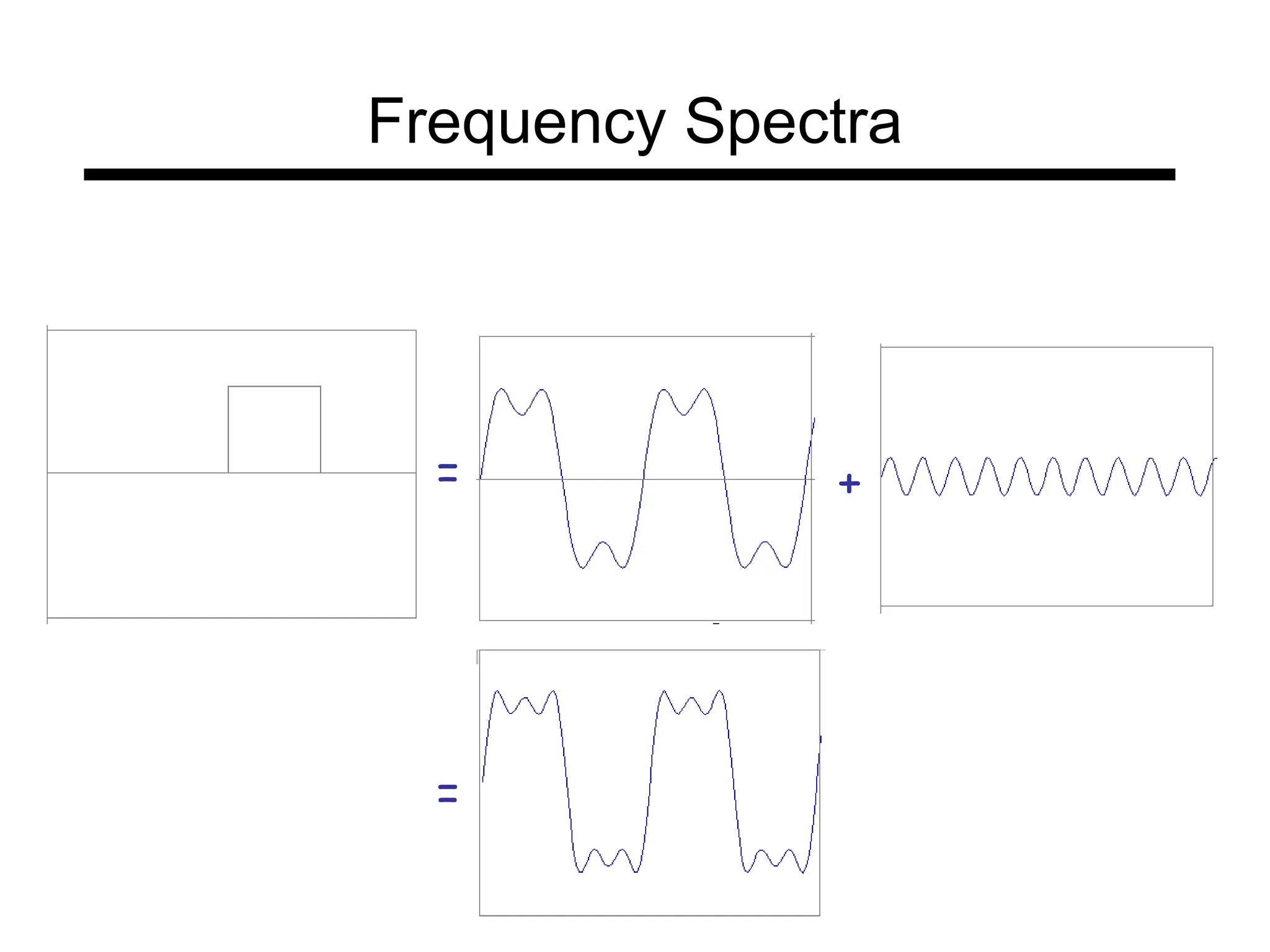
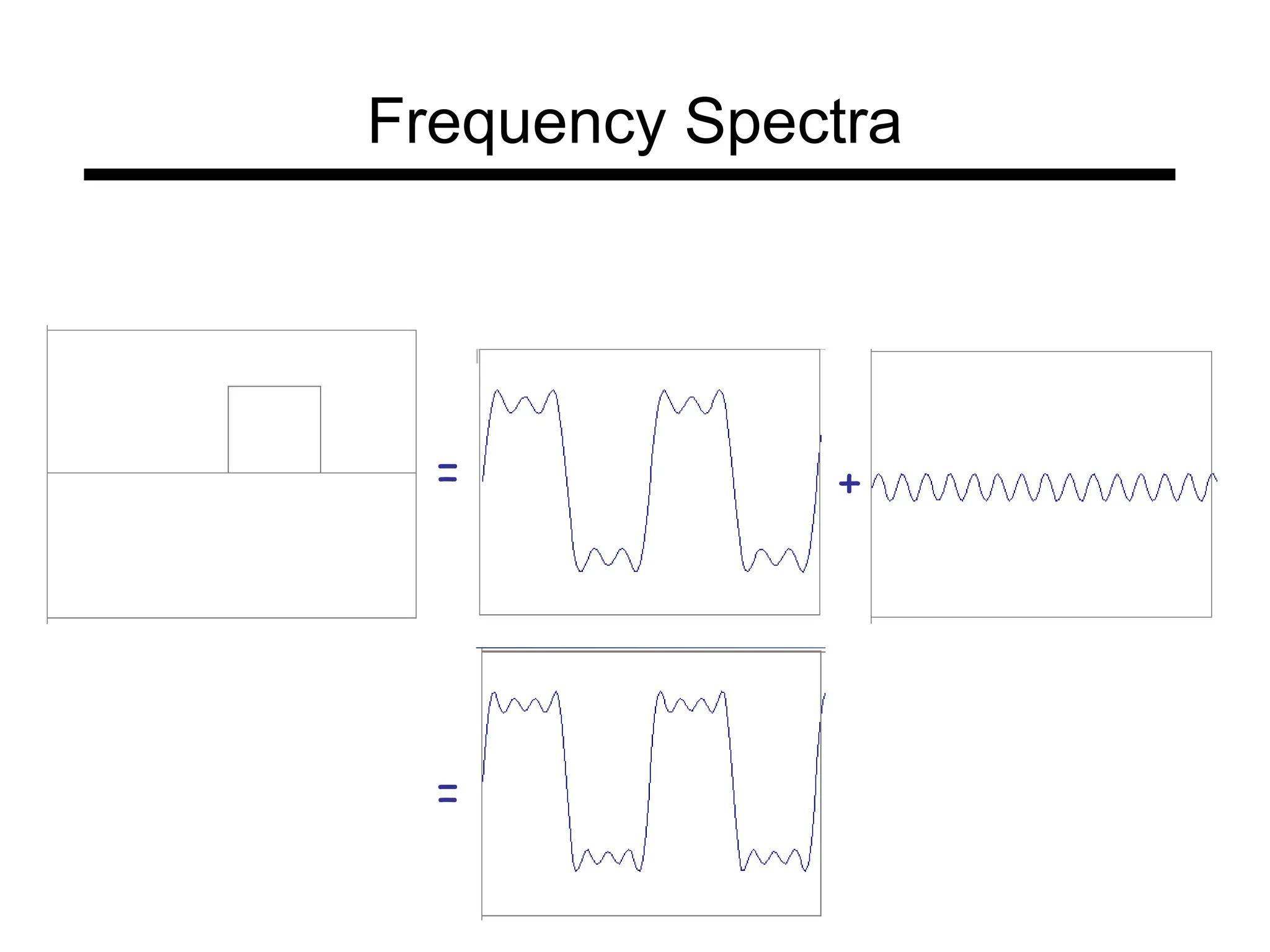
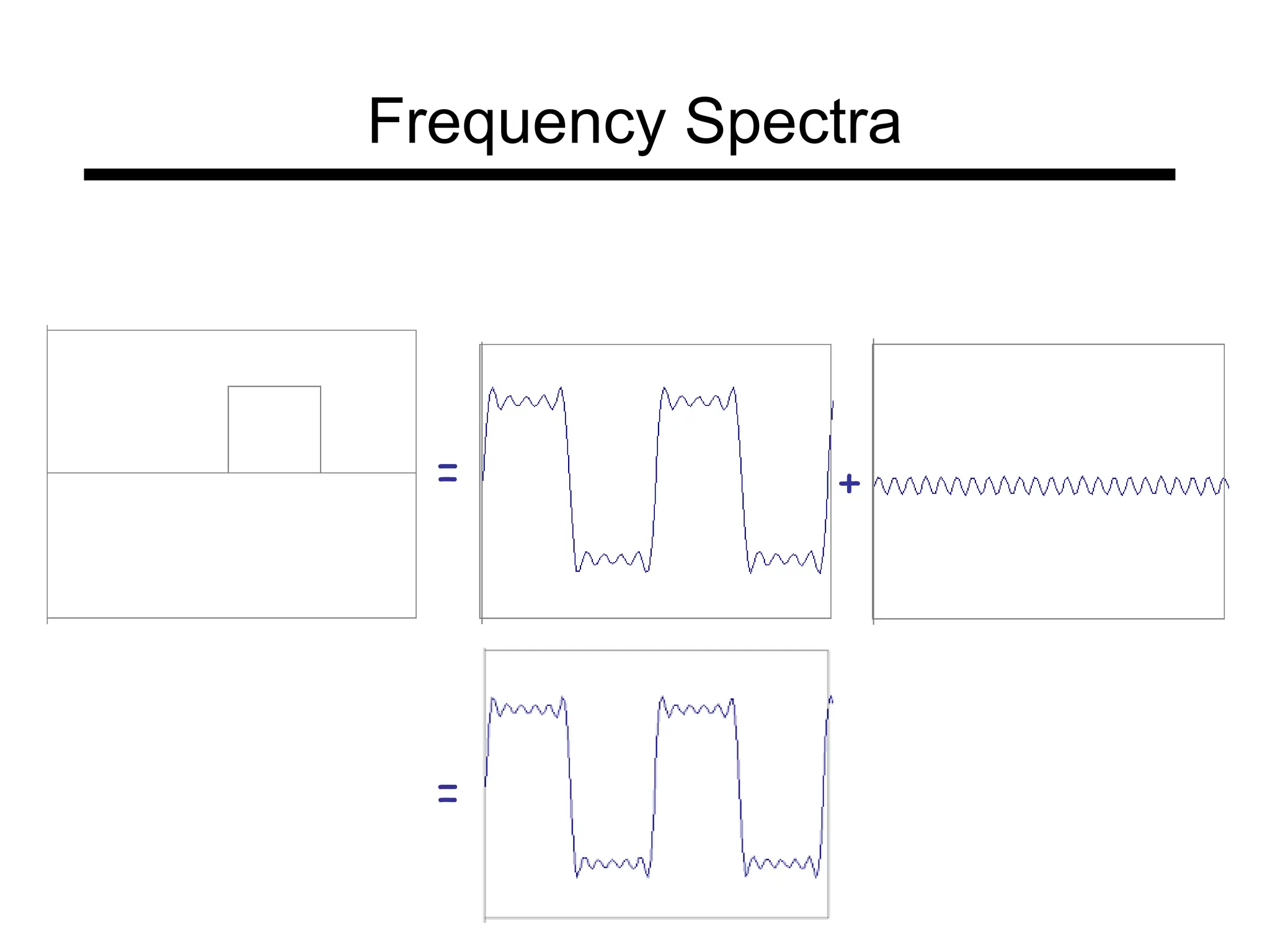
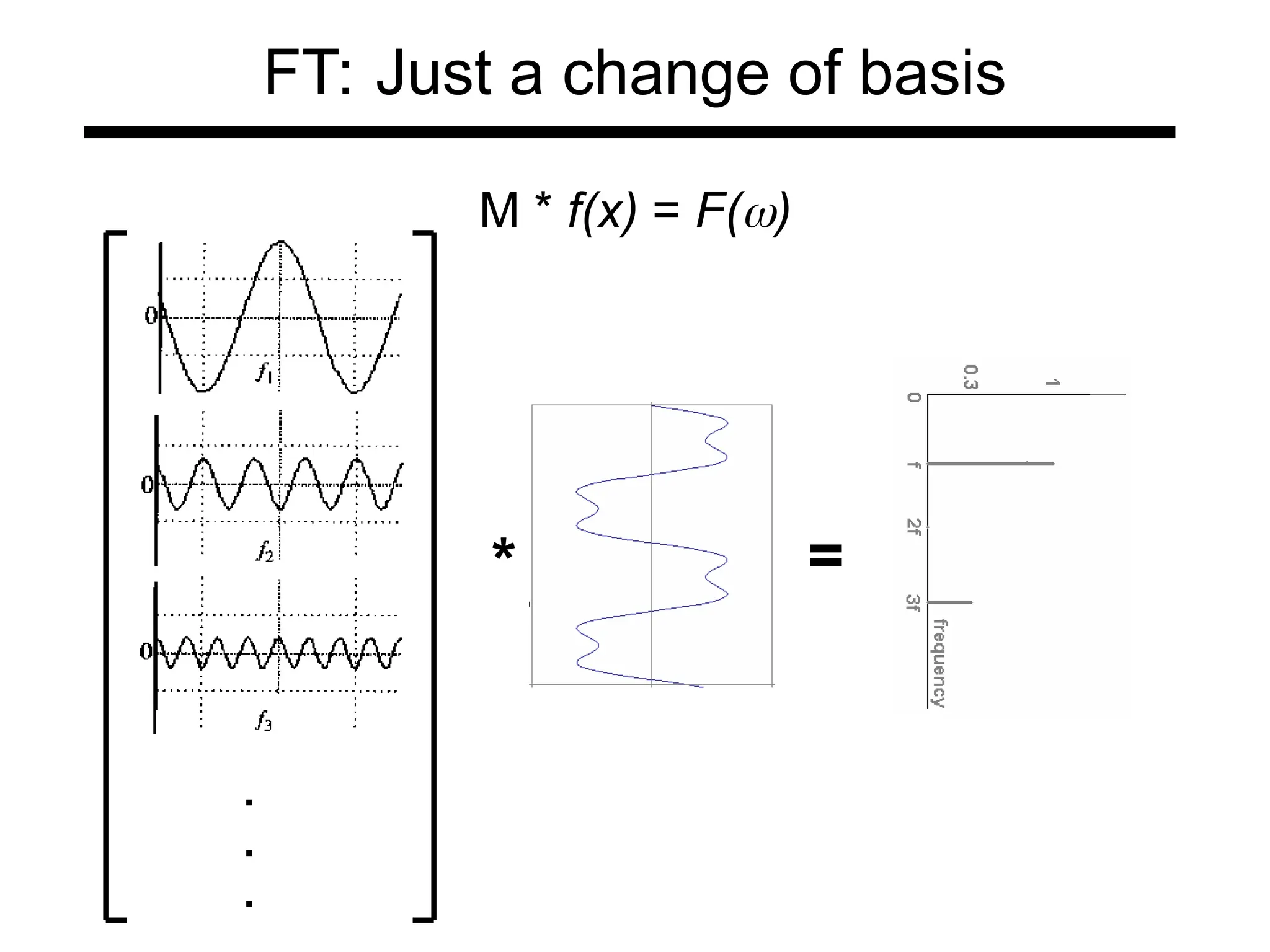
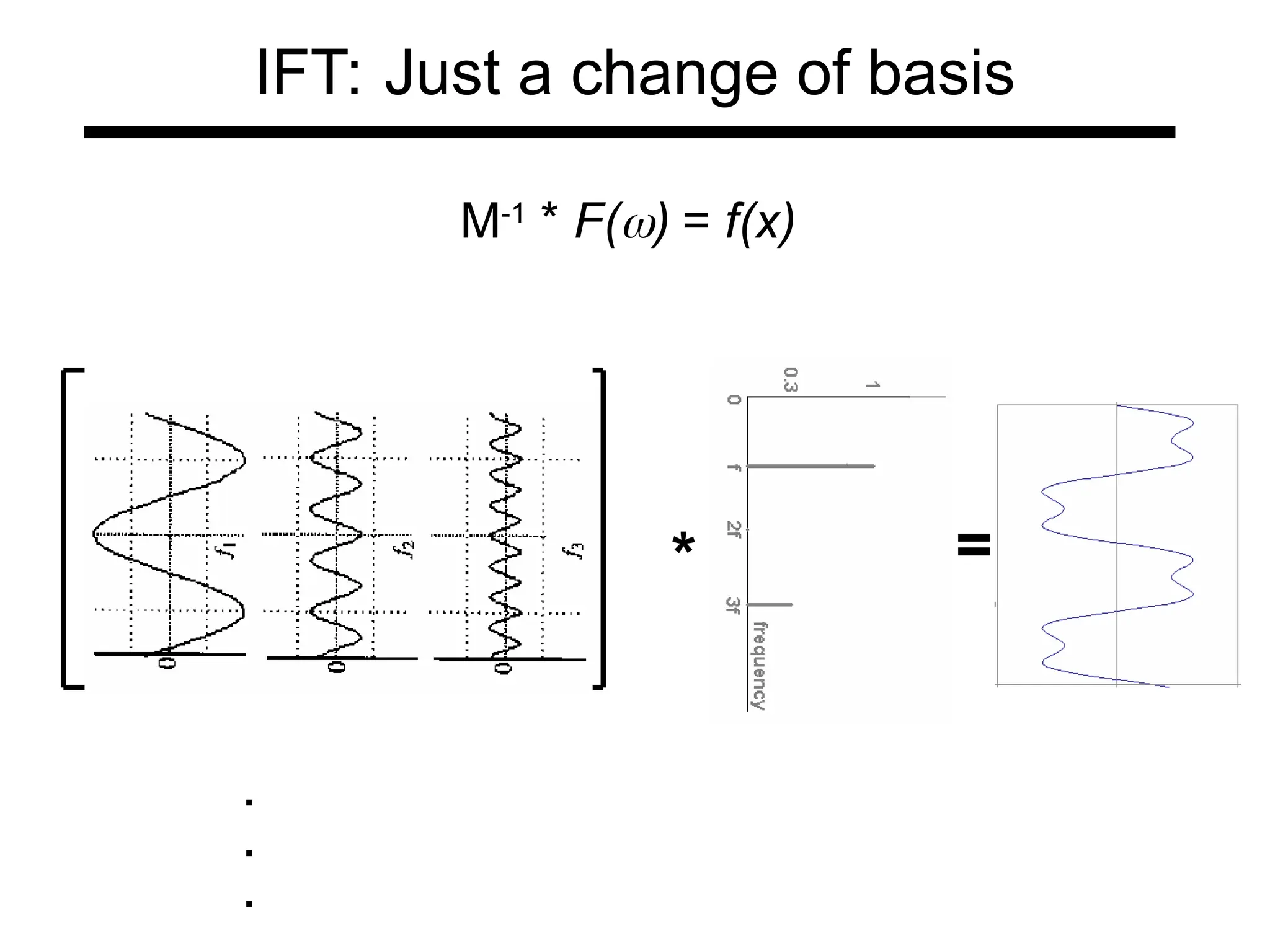
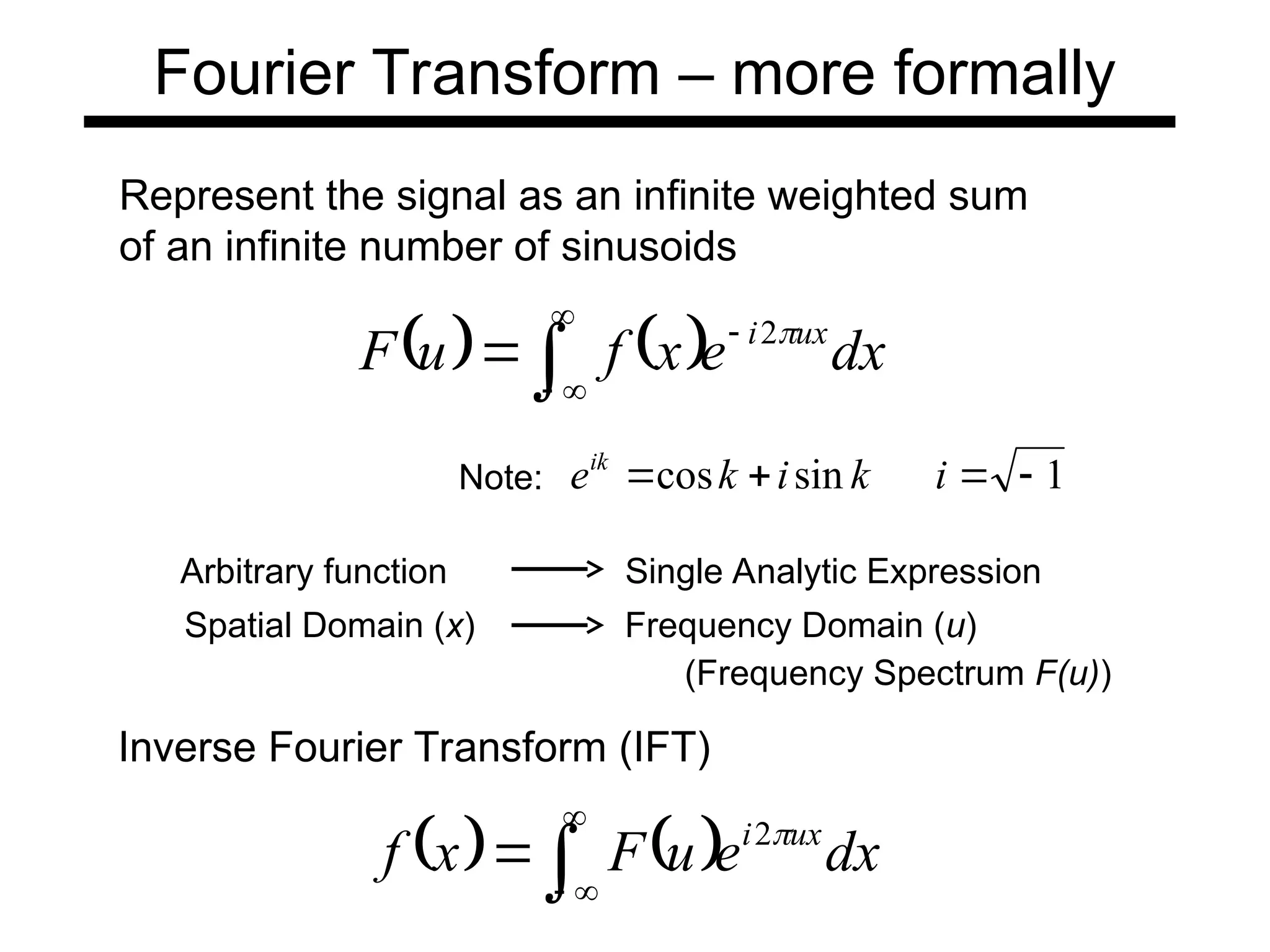
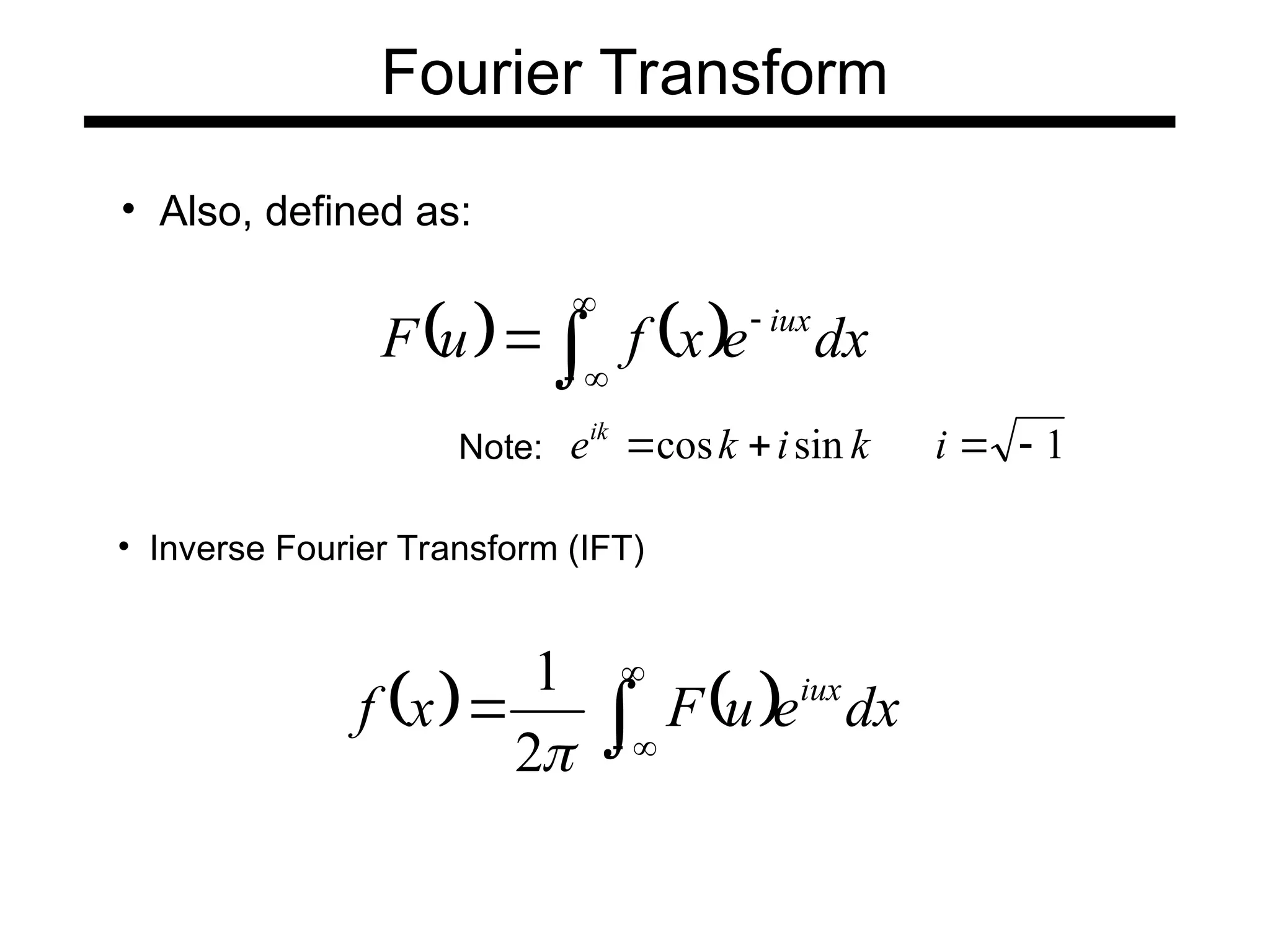
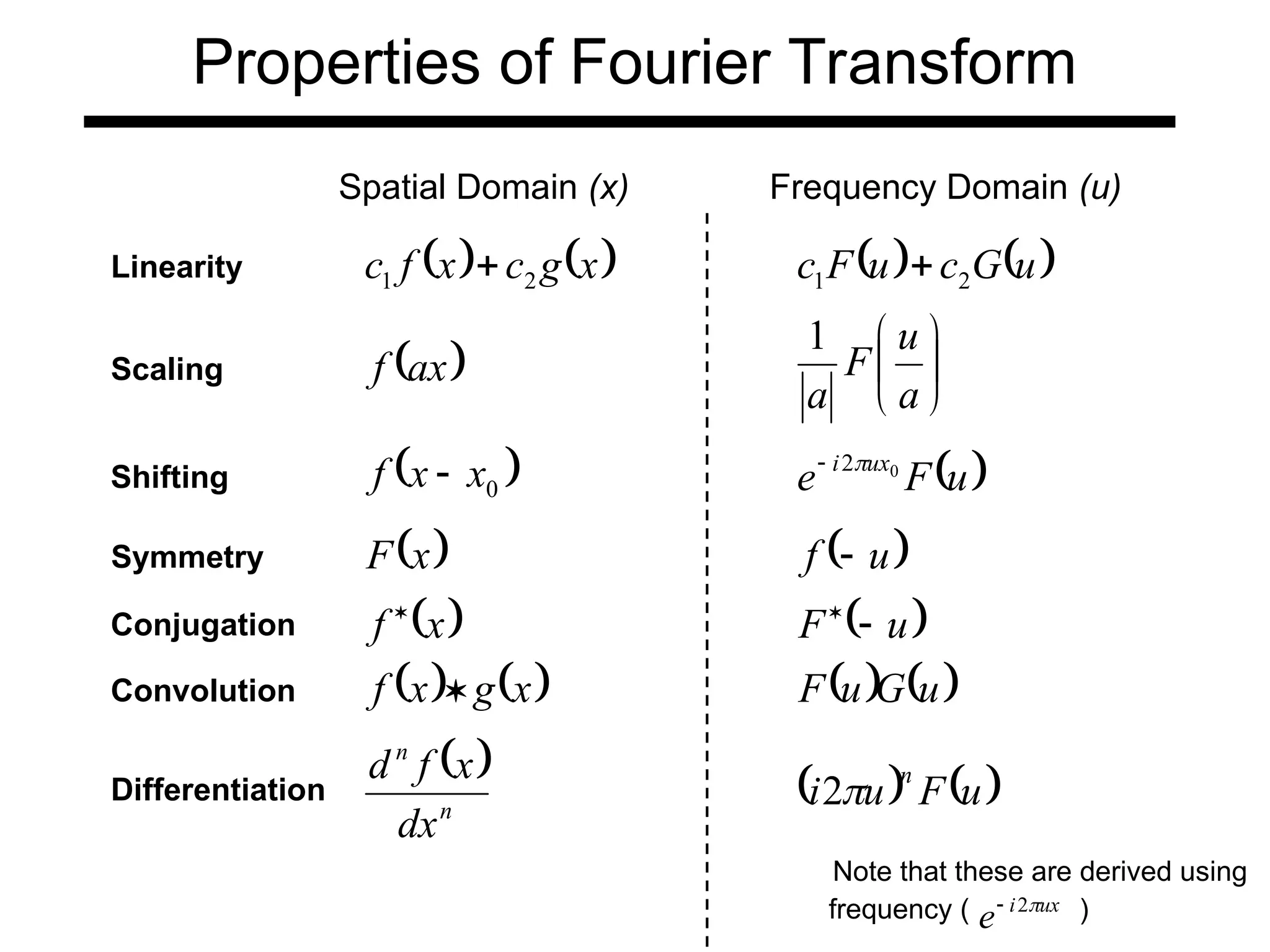
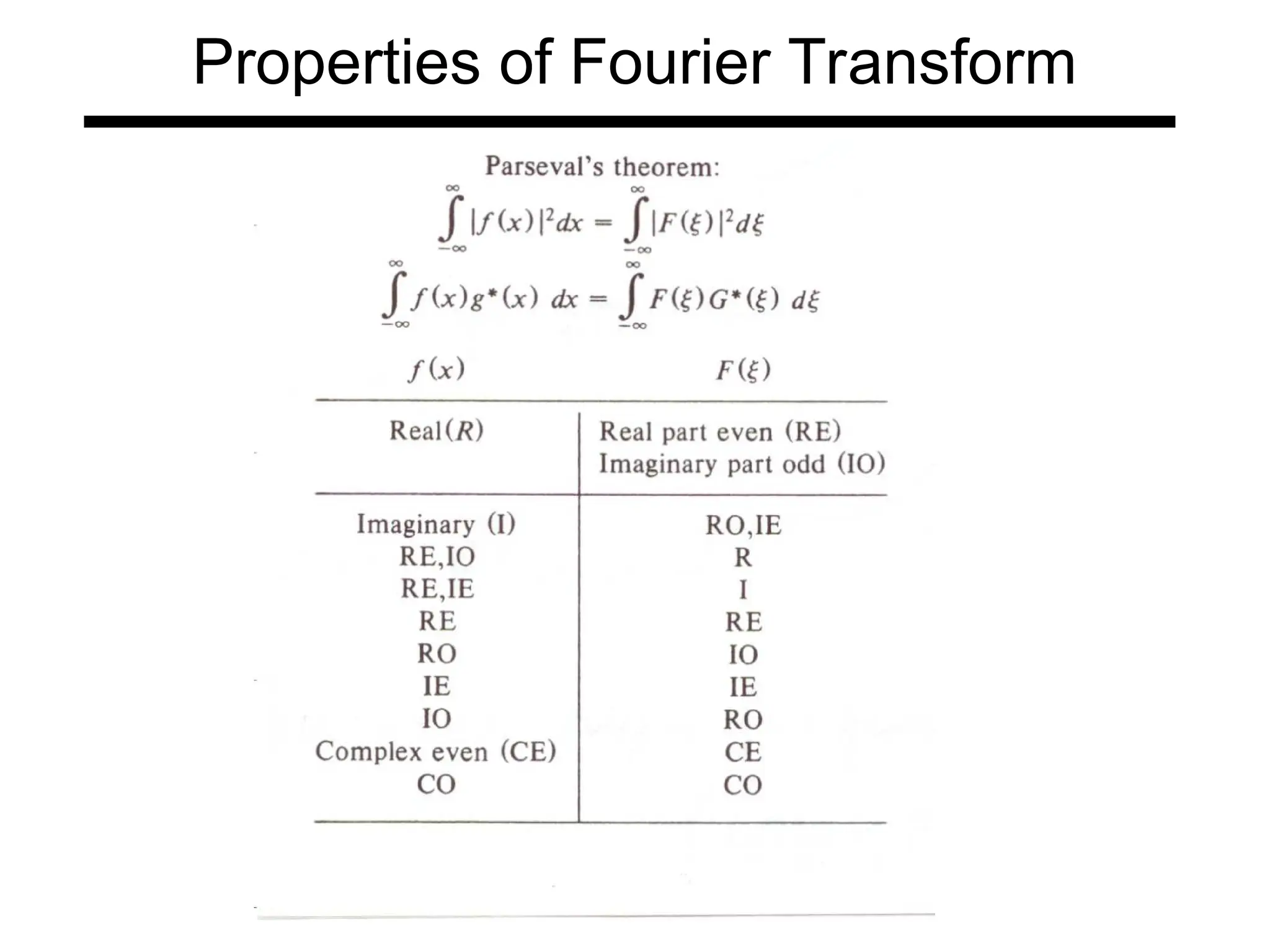
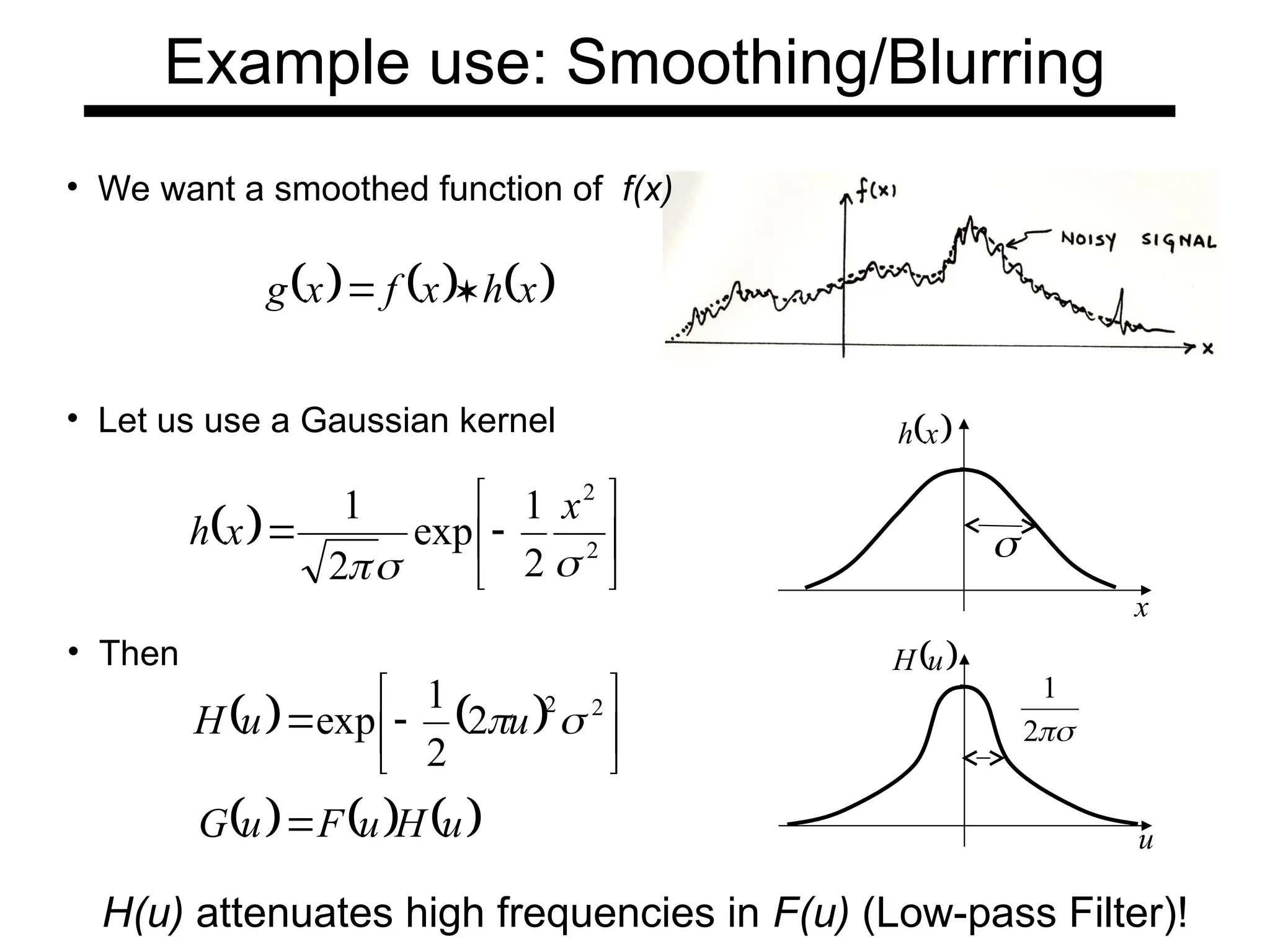
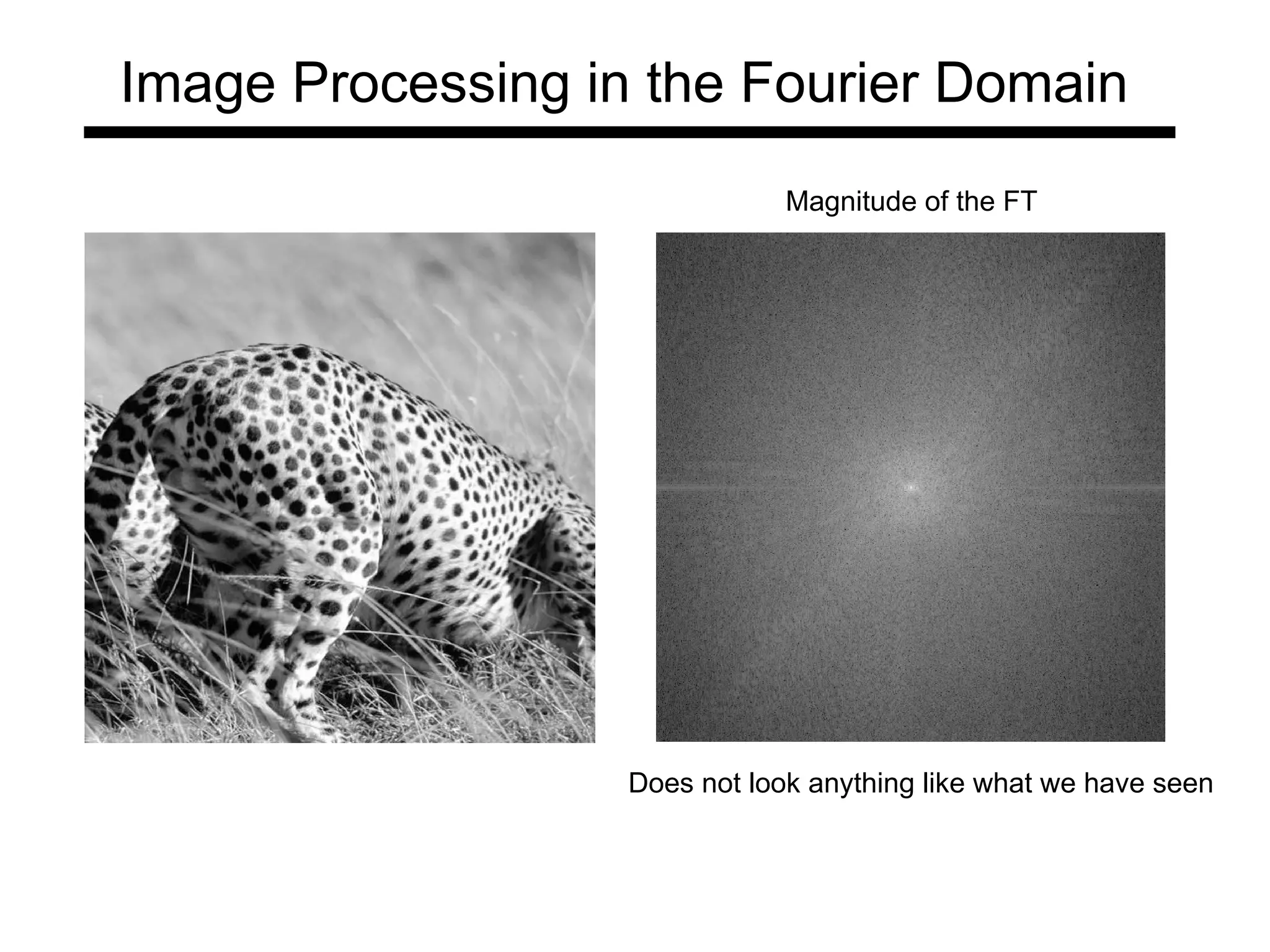
The document is a lecture on frequency domain analysis and Fourier transforms from a computer vision course. It discusses the representation of signals using Fourier series and transforms, emphasizing the significance of frequency over time in analyzing signals. It also covers properties and applications of Fourier transforms, such as convolution in spatial and frequency domains, and techniques like low-pass and high-pass filtering for image processing.

































![Lesson[1].pdf process and instrumentation notes](https://cdn.slidesharecdn.com/ss_thumbnails/lesson1-240610173012-2b12f7a8-thumbnail.jpg?width=640&height=640&fit=bounds)







![Lesson[1] .pdf input transduder notes](https://cdn.slidesharecdn.com/ss_thumbnails/lesson1-240610175041-c8777e45-thumbnail.jpg?width=640&height=640&fit=bounds)
![Lesson[2] .pdf temperature transduders](https://cdn.slidesharecdn.com/ss_thumbnails/lesson2-240610180416-65d4c779-thumbnail.jpg?width=640&height=640&fit=bounds)




















