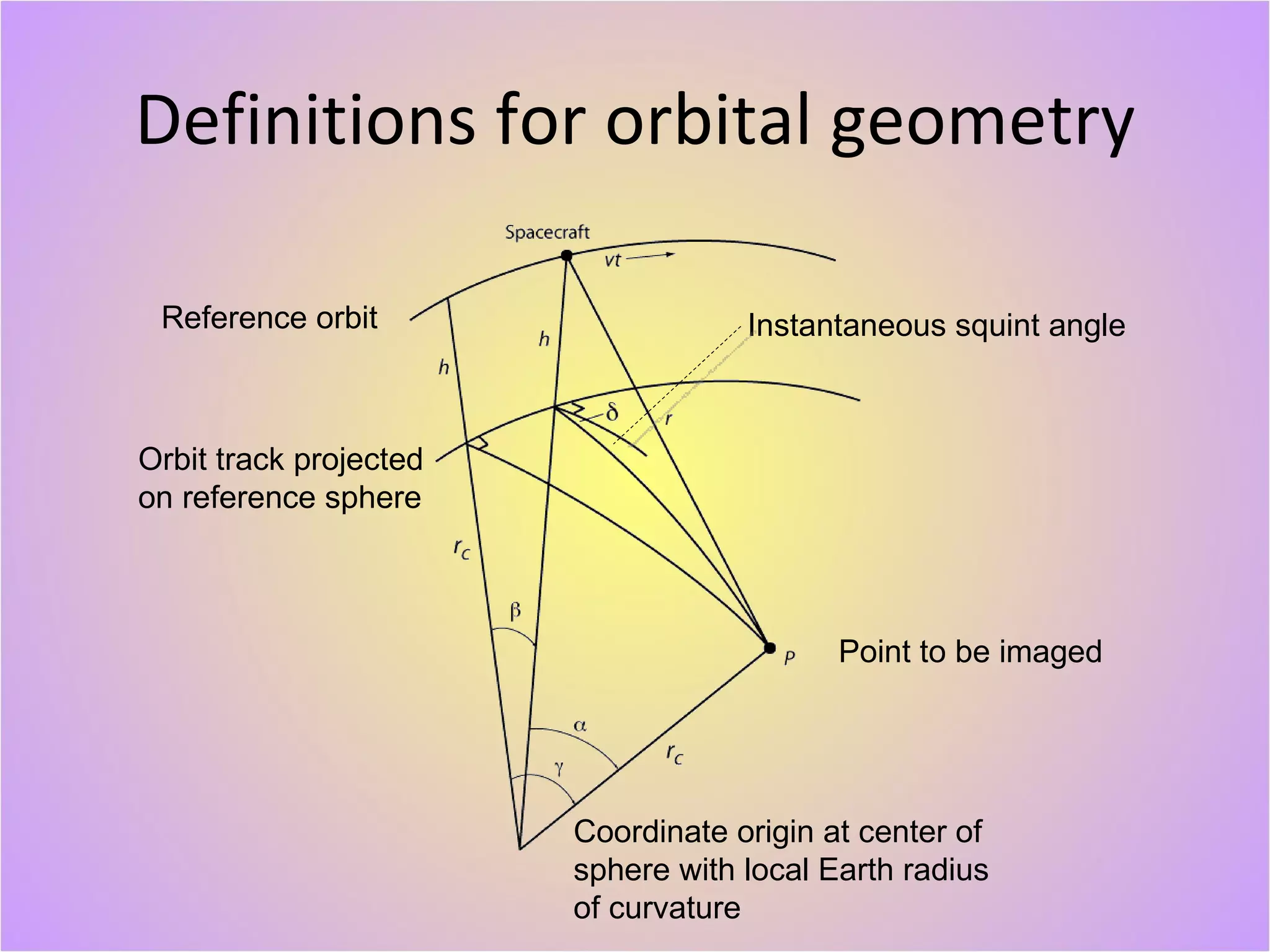
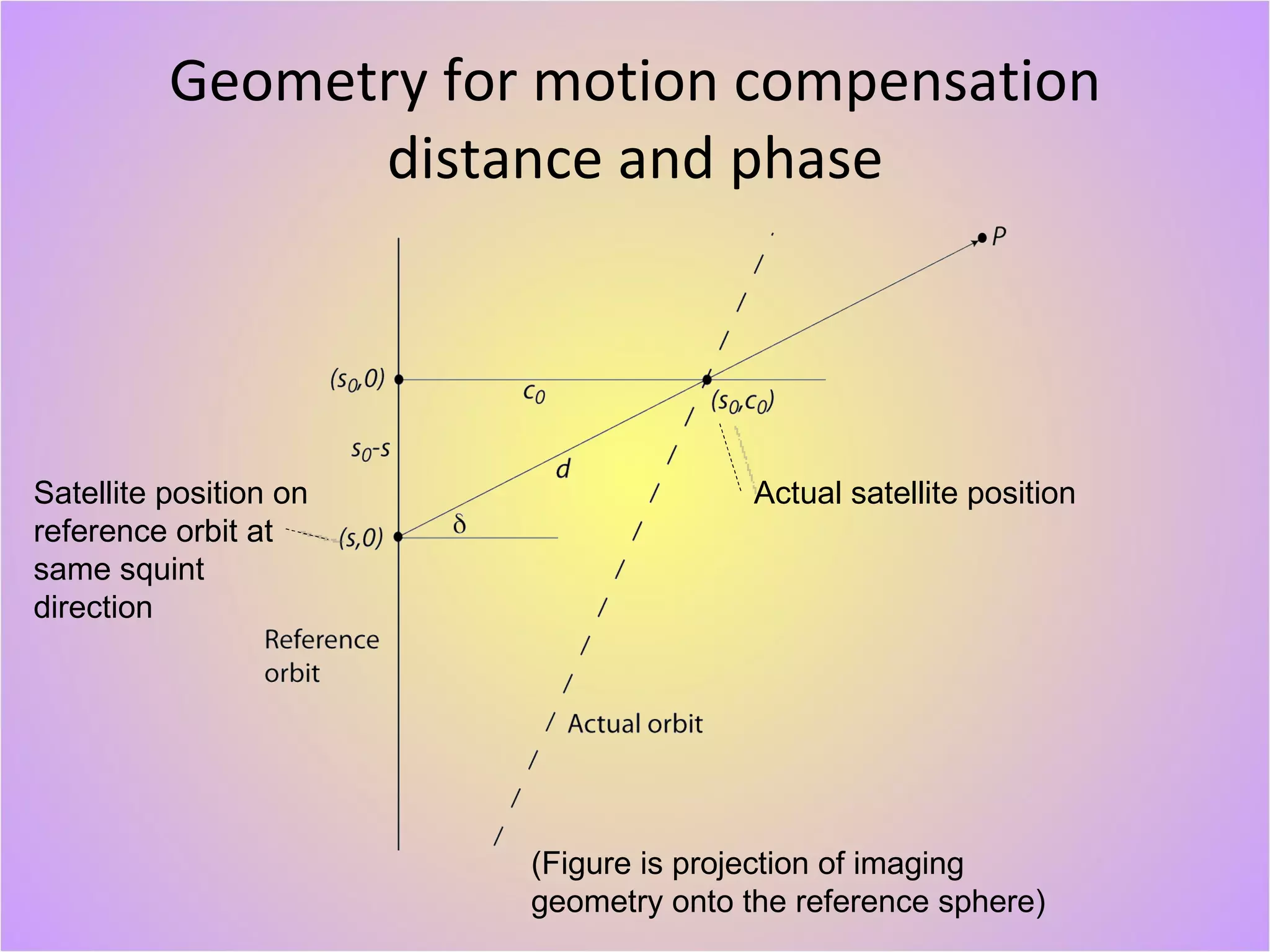
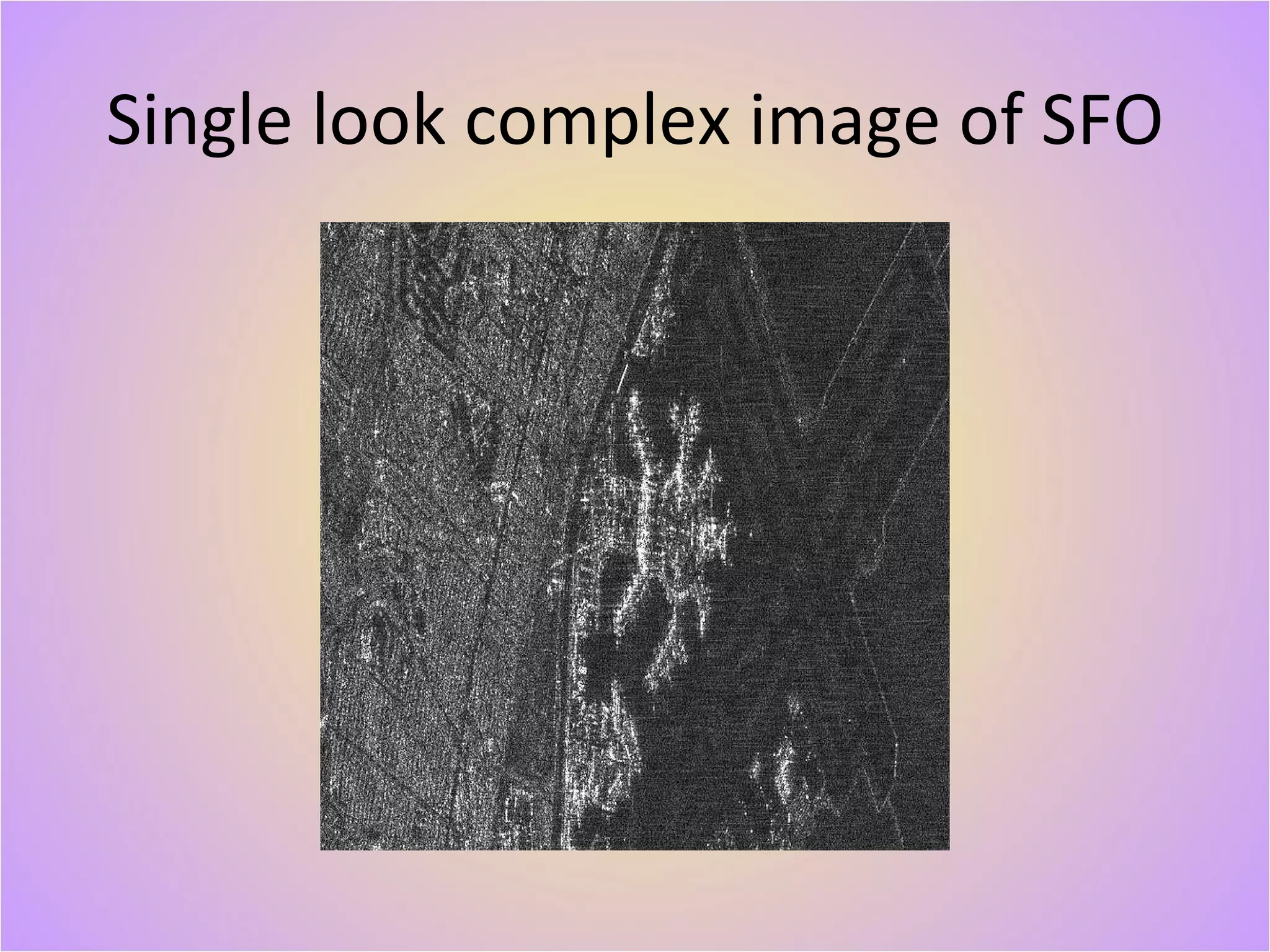
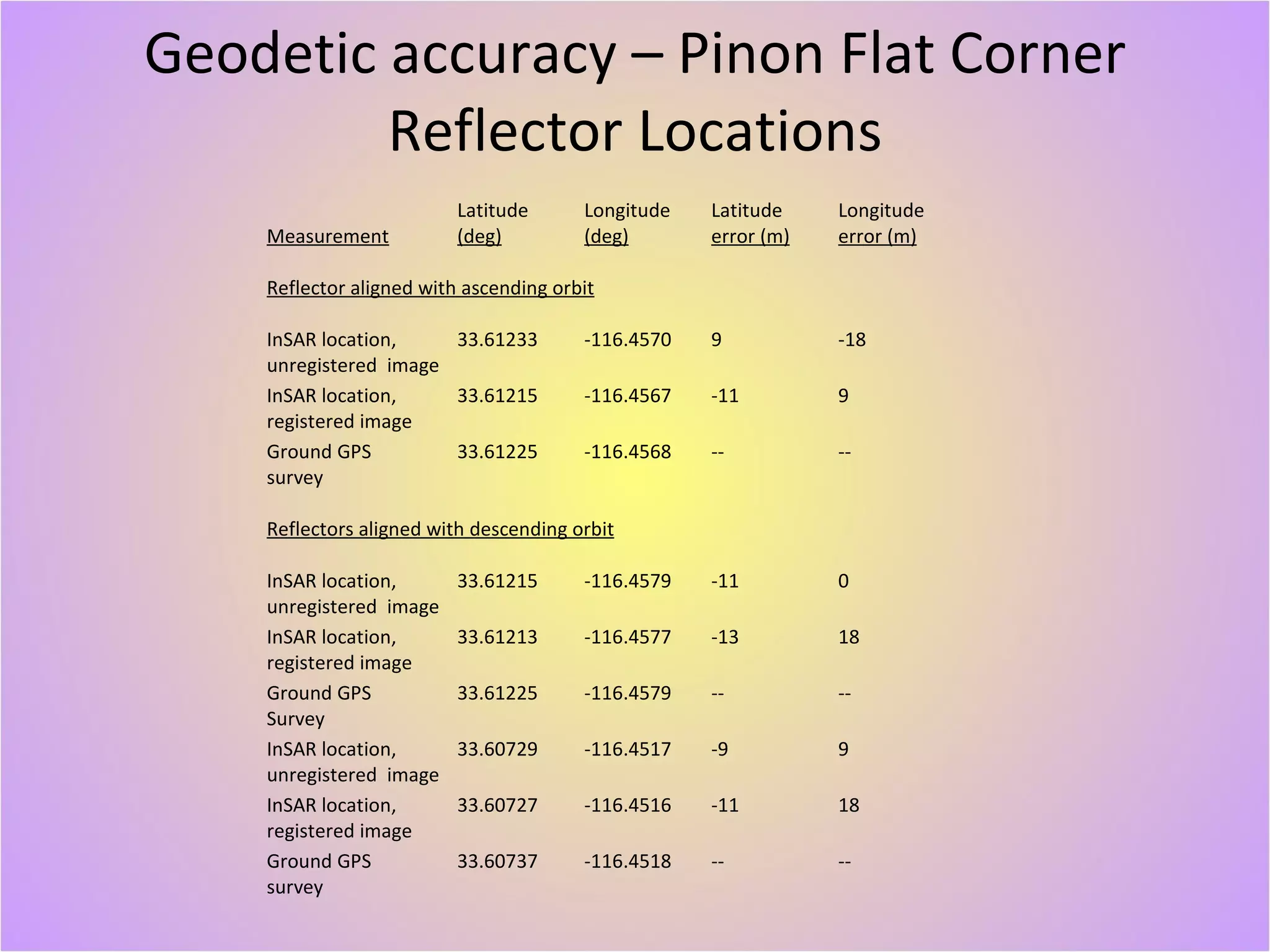
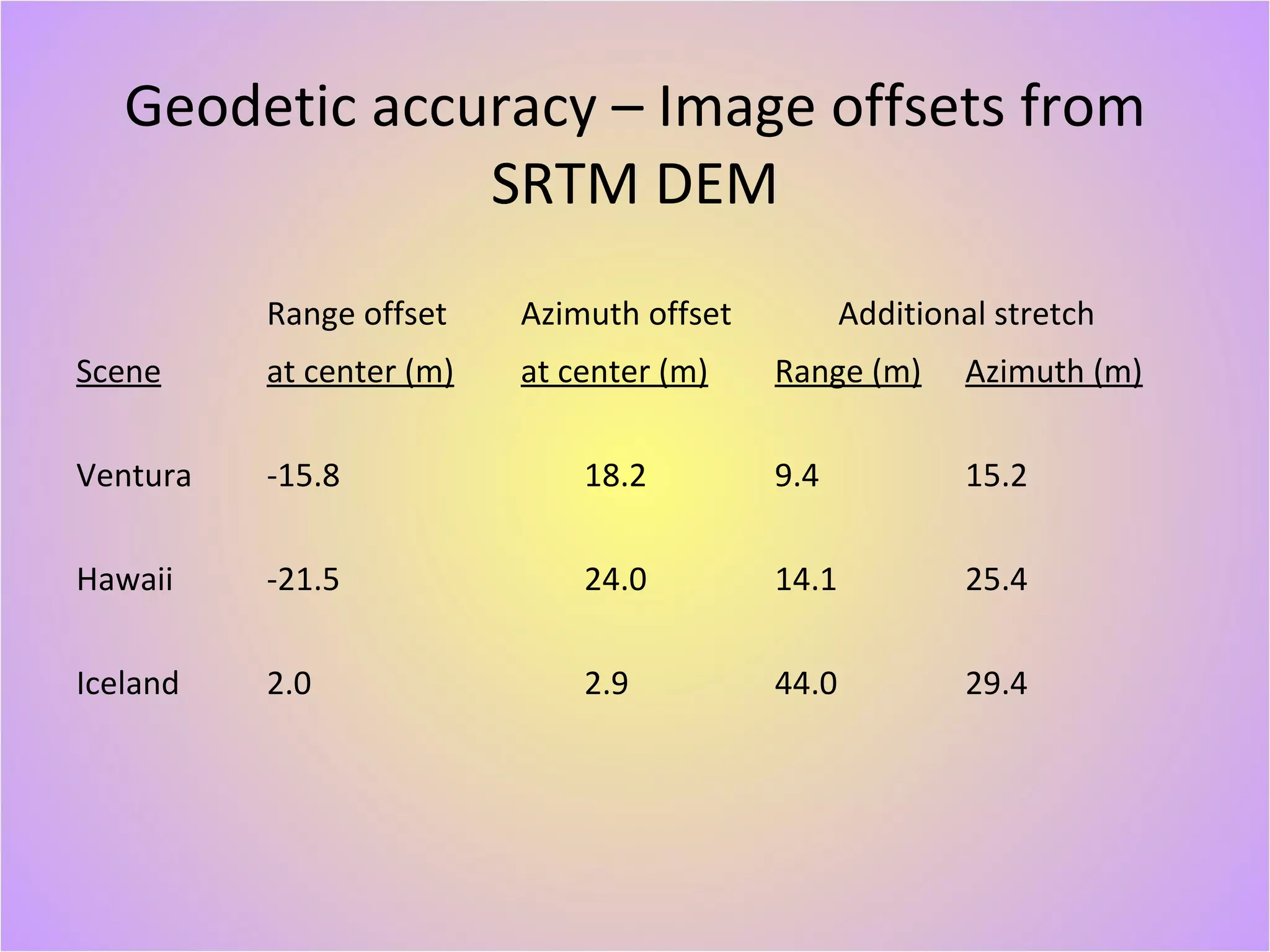
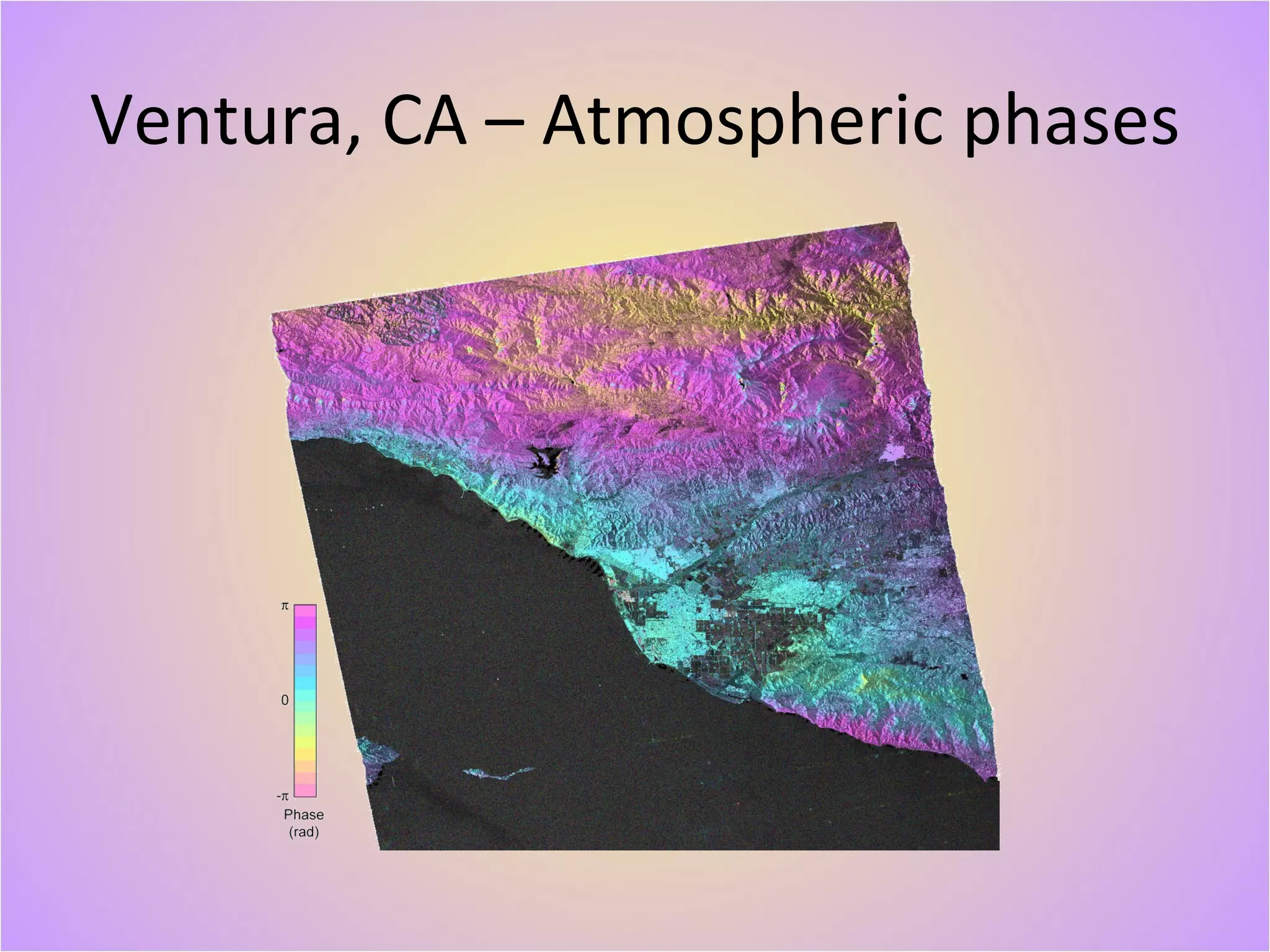
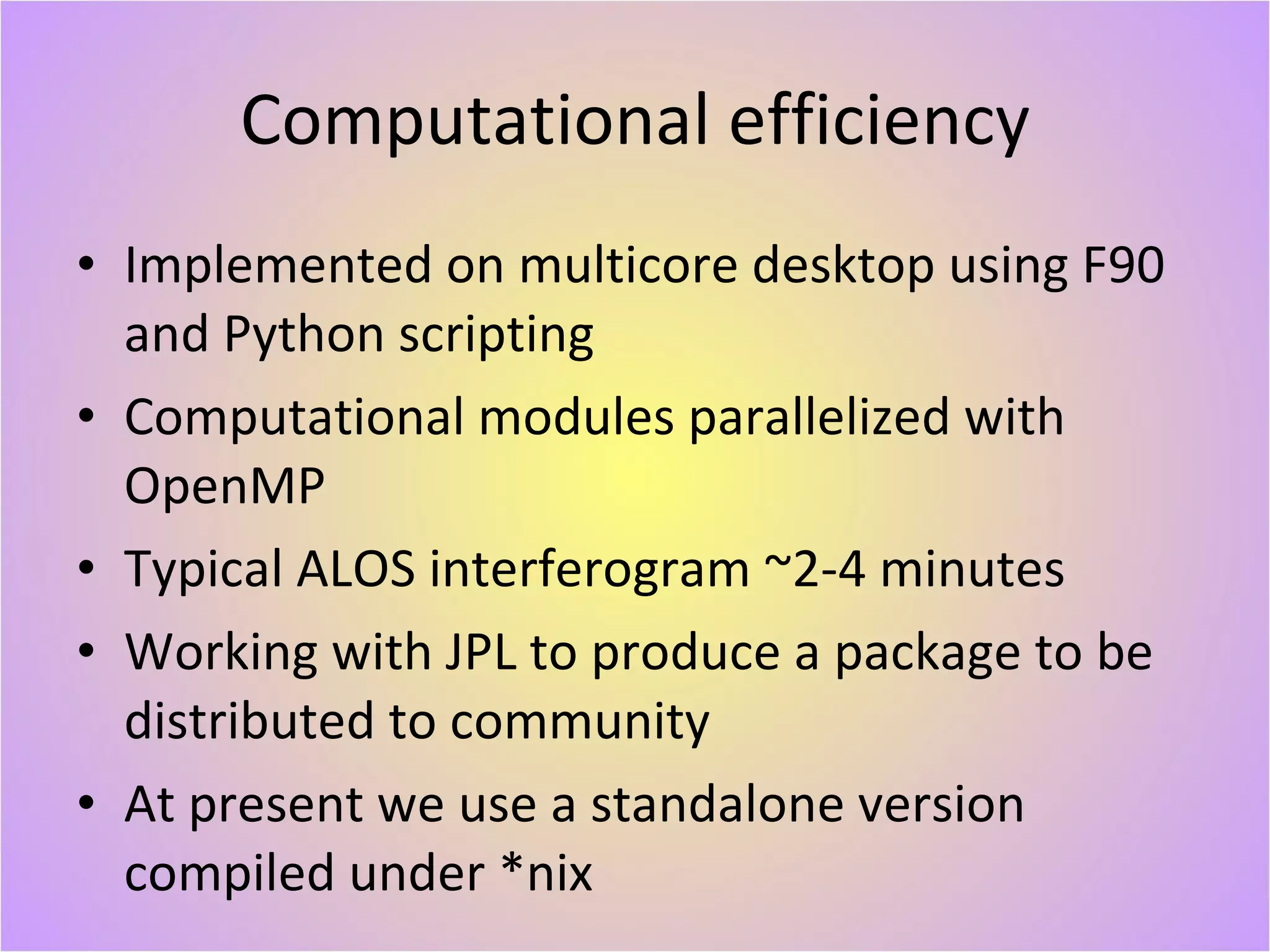
The document describes a new geodetically accurate InSAR data processor for time series analysis. The processor uses precise satellite orbits and a reference orbit to align Synthetic Aperture Radar (SAR) images with sub-meter accuracy. It employs a motion compensation algorithm to account for differences between the actual satellite position and reference orbit. The processor achieves accurate geolocation and is computationally efficient, processing interferograms for large areas in only a few minutes on a desktop computer. Validation tests using corner reflectors and SRTM elevation data demonstrate the processor's improved geodetic accuracy compared to existing tools.