Download as PDF, PPTX
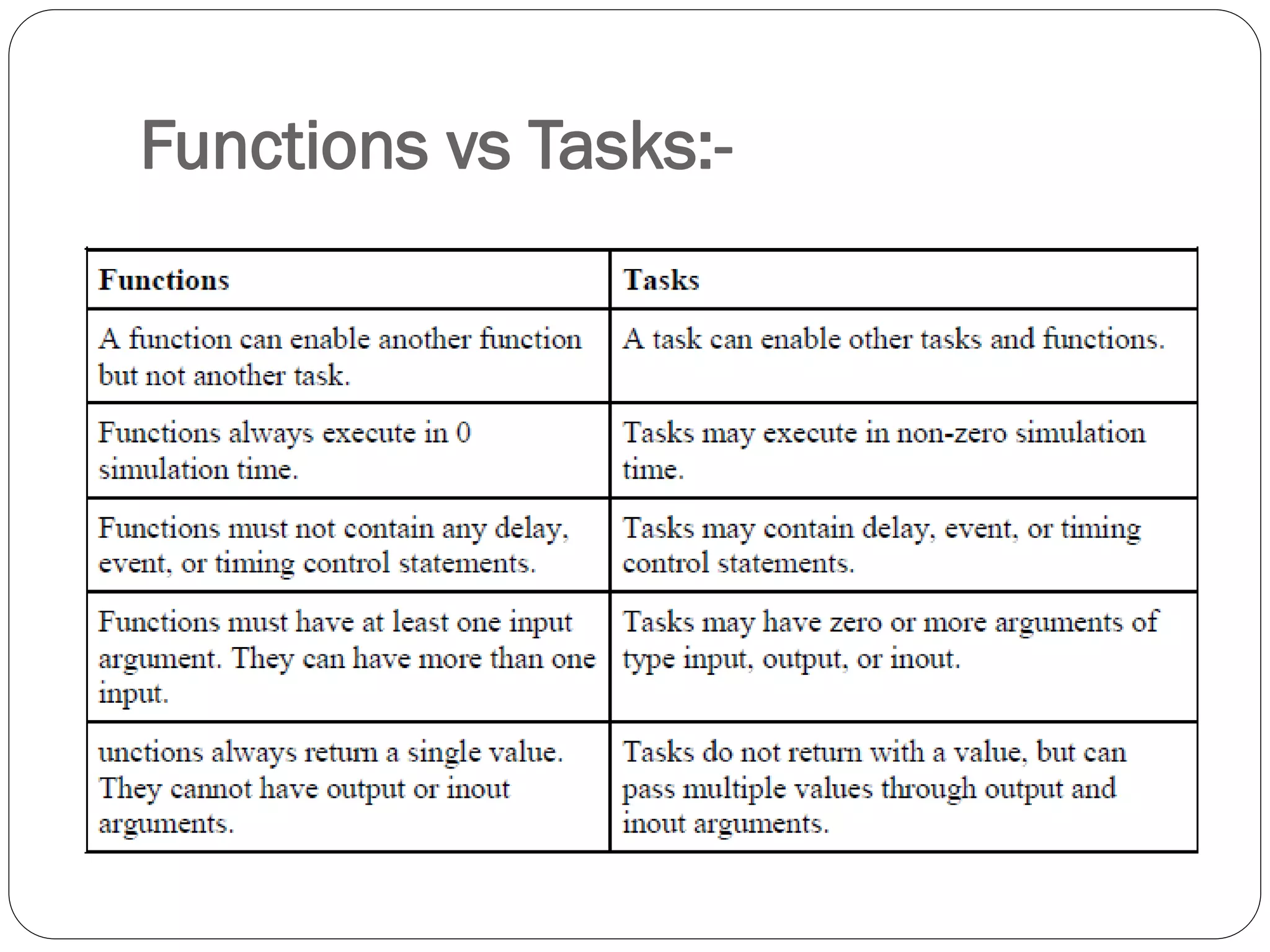

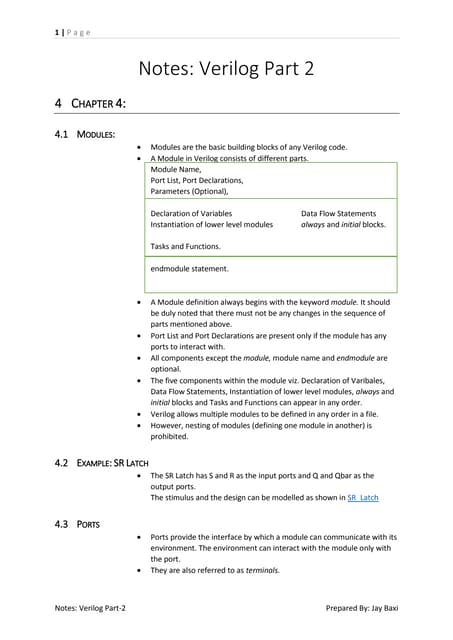
Functions and tasks allow for code reusability in Verilog. Functions are used for combinational logic, execute immediately without delays, and return a single value. Tasks can contain delays and timing controls, are used for both combinational and sequential logic, and can pass multiple values through input/output arguments but do not return a value. The key differences are that functions cannot enable other tasks or contain delays while tasks can enable other tasks and functions and can contain delays.























































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)









