Downloaded 17 times
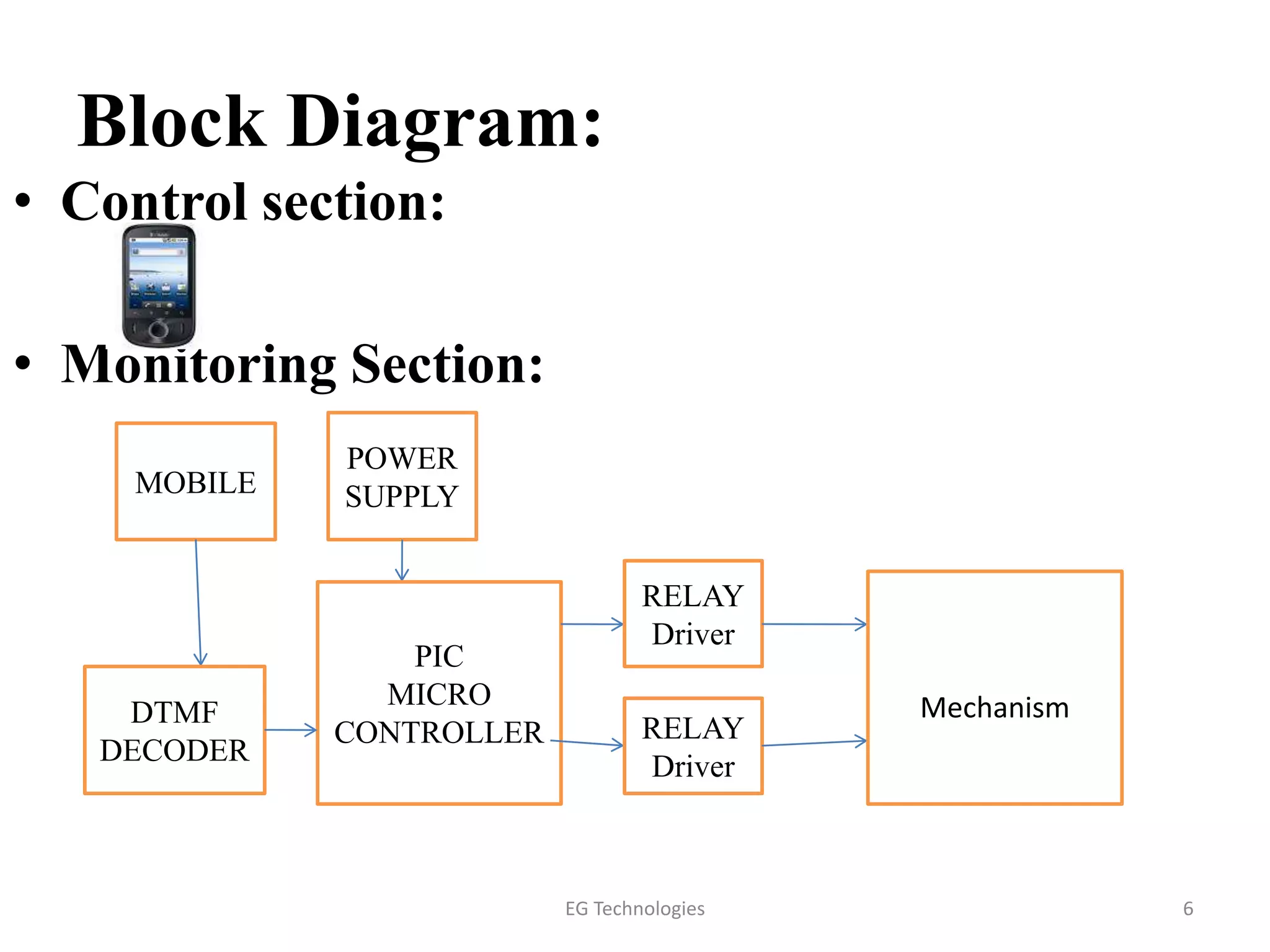
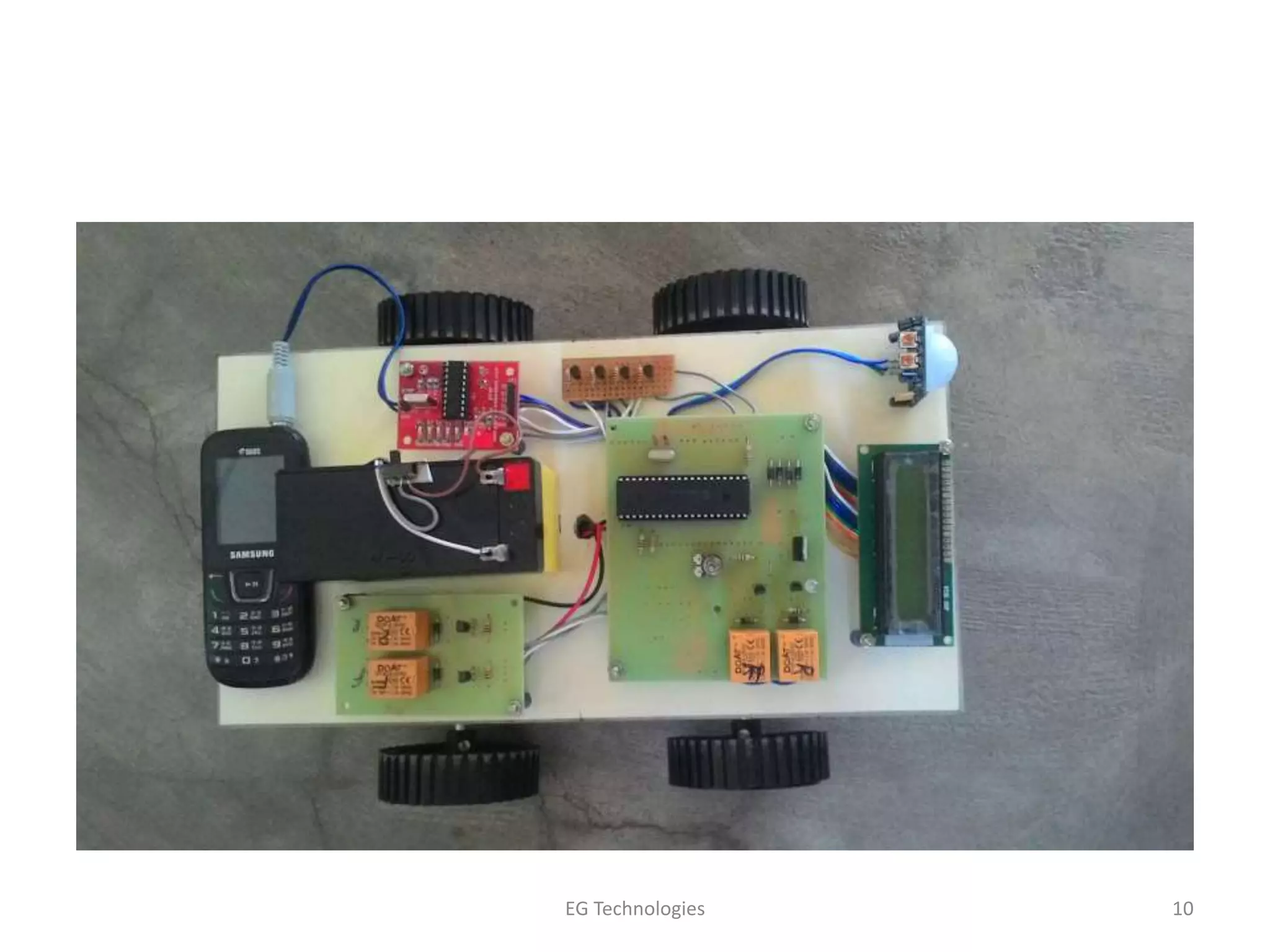


This document proposes a system to control an unmanned robot using dual tone multi-frequency (DTMF) signaling from a mobile phone. The existing systems use separate wireless devices to control robots, which have limitations like limited range and control. The proposed system uses a PIC microcontroller and DTMF decoder to receive DTMF tones from a mobile phone and control a robot mechanism through relay drivers. This allows remote control of a robot from a standard mobile phone, reducing complexity while improving accuracy and range over existing wireless solutions.