The document outlines the principles and elements of digital signal processing, including definitions of signals, systems, and the processes involved in filtering and processing signals. It differentiates between analog and digital signal processing, highlighting the advantages of digital systems, such as improved accuracy and ease of storage. Additionally, it classifies signals into various types, such as continuous versus discrete, deterministic versus random, and introduces key concepts like sampling and quantization.
![Characteristics of Signals
A sign wave has three characteristics:
Amplitude
Frequency or period
Phase
Where,
Ai (t)= Amplitude, Fi (t)=Frequency,i(t)=Phase
𝐴
𝑖ሺ
𝑡ሻ𝑆
𝑖𝑛[2𝜋
𝐹
𝑖ሺ
𝑡ሻ𝑡+ 𝜃𝑖(𝑡)]
𝑁
𝑖=1](https://image.slidesharecdn.com/dspmodule1ppt-241022110359-49fbd8a2/75/Digital-Signal-Processing-module-1-ppt-pptx-4-2048.jpg)
![Multichannel and Multidimensional signals
Multichannel Signals:
Signals which are generated by multiple sources or multiple sensors are called multichannel signals.
These signals are represented by vector
S(t) = [(S1(t) S2(t) S3 (t)]
Above signal represents a 3-channel signal.
Multidimensional signals:
A signal is called multidimensional signal if it is a function of M independent variables.
For example : Speech signal is a one dimensional signal because amplitude of signal depends upon
single independent variable, namely, time.](https://image.slidesharecdn.com/dspmodule1ppt-241022110359-49fbd8a2/75/Digital-Signal-Processing-module-1-ppt-pptx-11-2048.jpg)




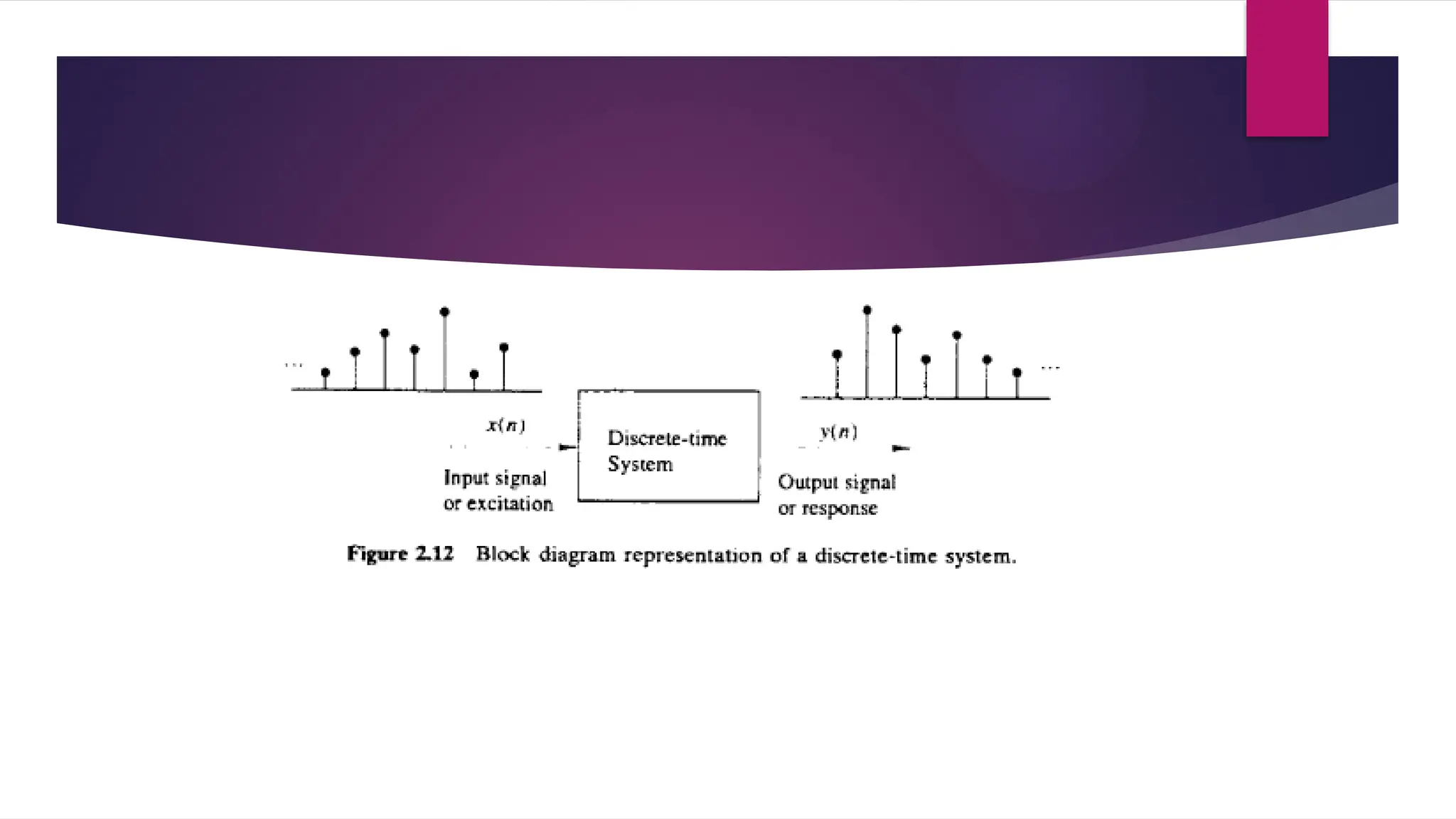
![DISCRETE-TIME SYSTEMS
A discrete-time system is a device or algorithm that operates on a discrete -time
signal,called the input or excitation, according to some well-defined rule, to
produce an other discrete-tim e signal called the output or response of the
system .
In general,
We view a system as an operation or a set of operations performed on the input
signal x(n) to produce the output signal y(n). We say that the input signal x(n) is
transformed by the system in to a signal y(n), and express the general
relationship between x(n) and y(n) as
y(n)=Τ[x(n)]
where the symbol T denotes th e transformatio n (also called an operator), or
processing performed by the system on x(n) to produce y(n).](https://image.slidesharecdn.com/dspmodule1ppt-241022110359-49fbd8a2/75/Digital-Signal-Processing-module-1-ppt-pptx-38-2048.jpg)

![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)





























































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)













