Download to read offline

![44 International Journal for Modern Trends in Science and Technology
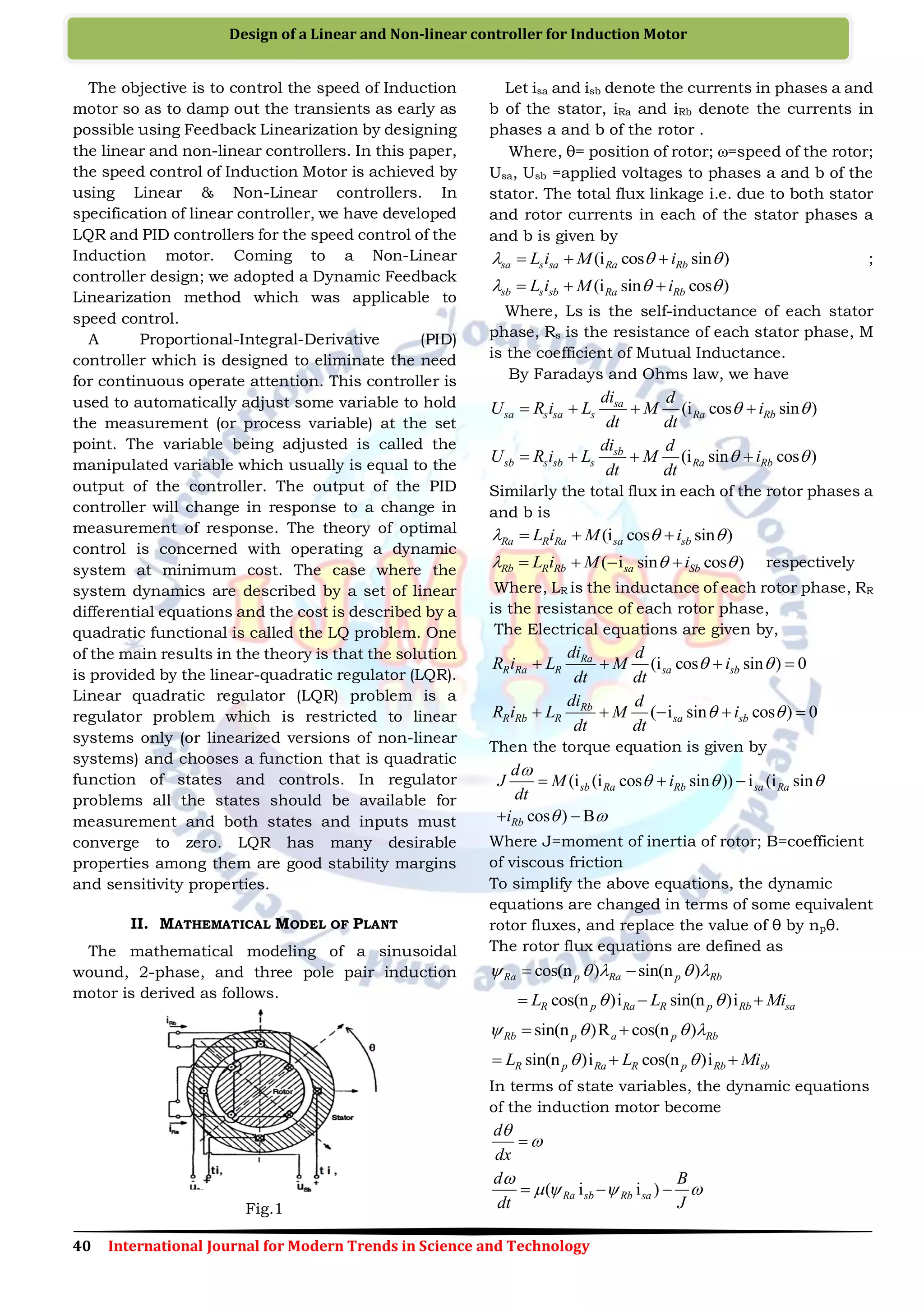
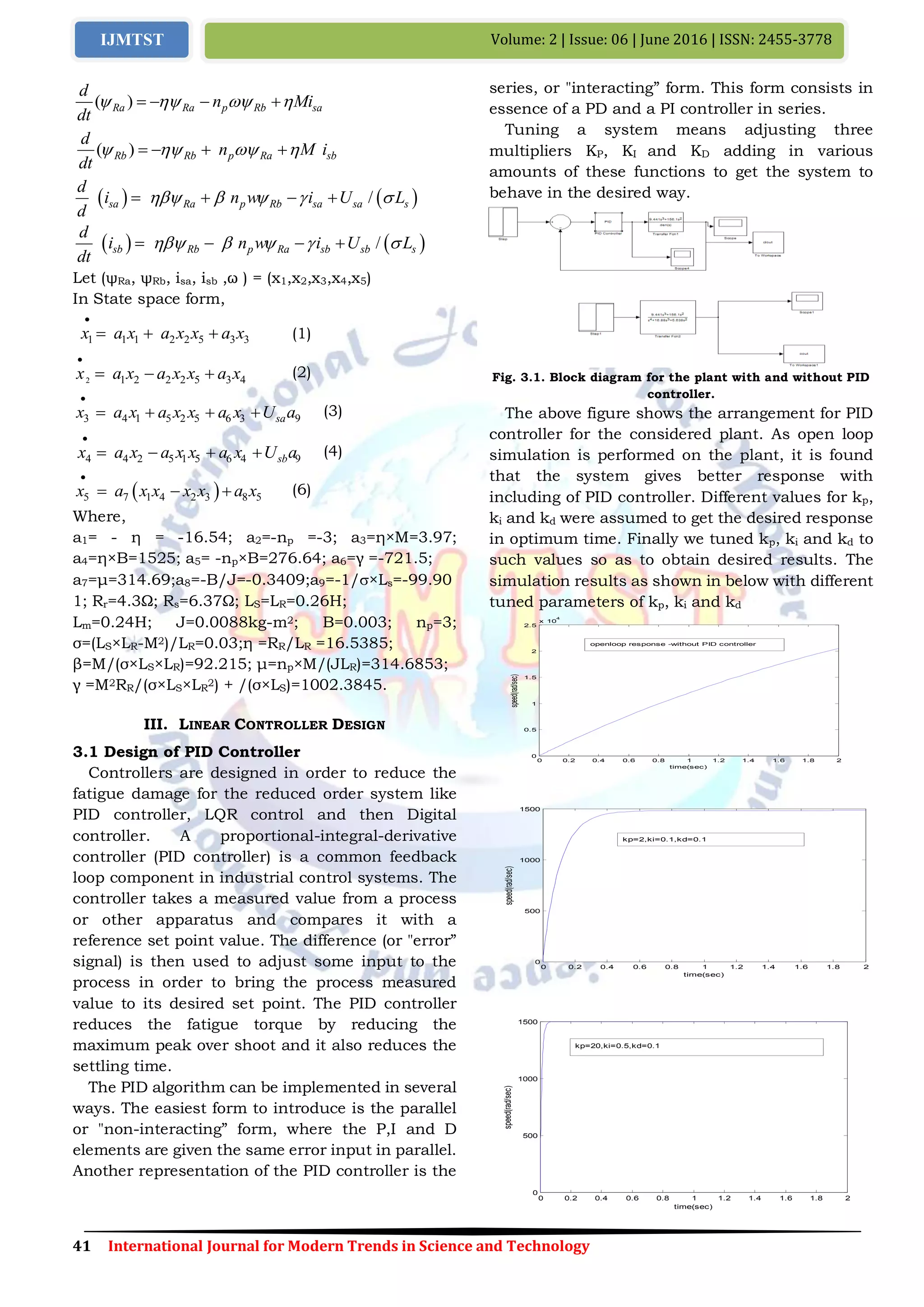
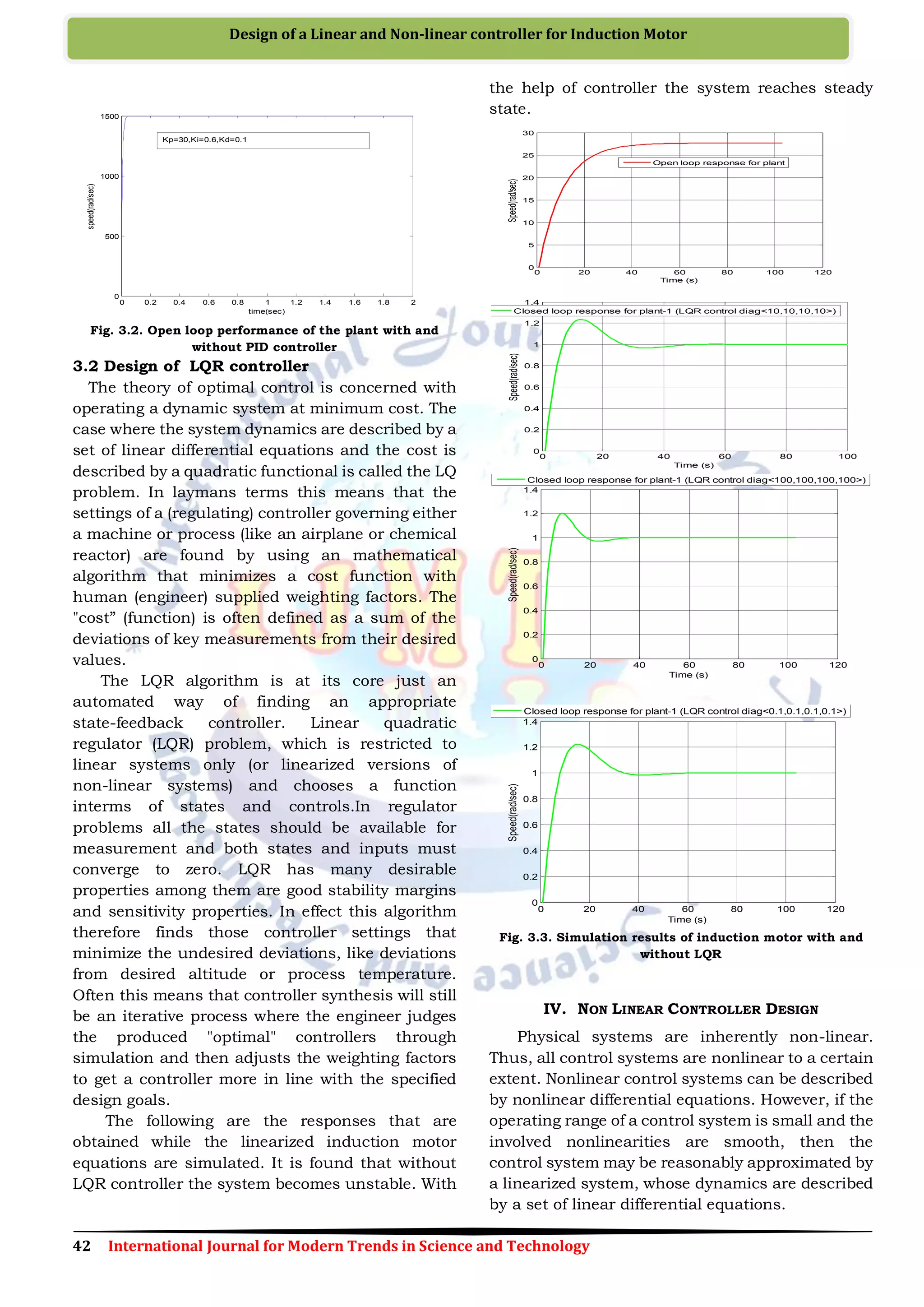
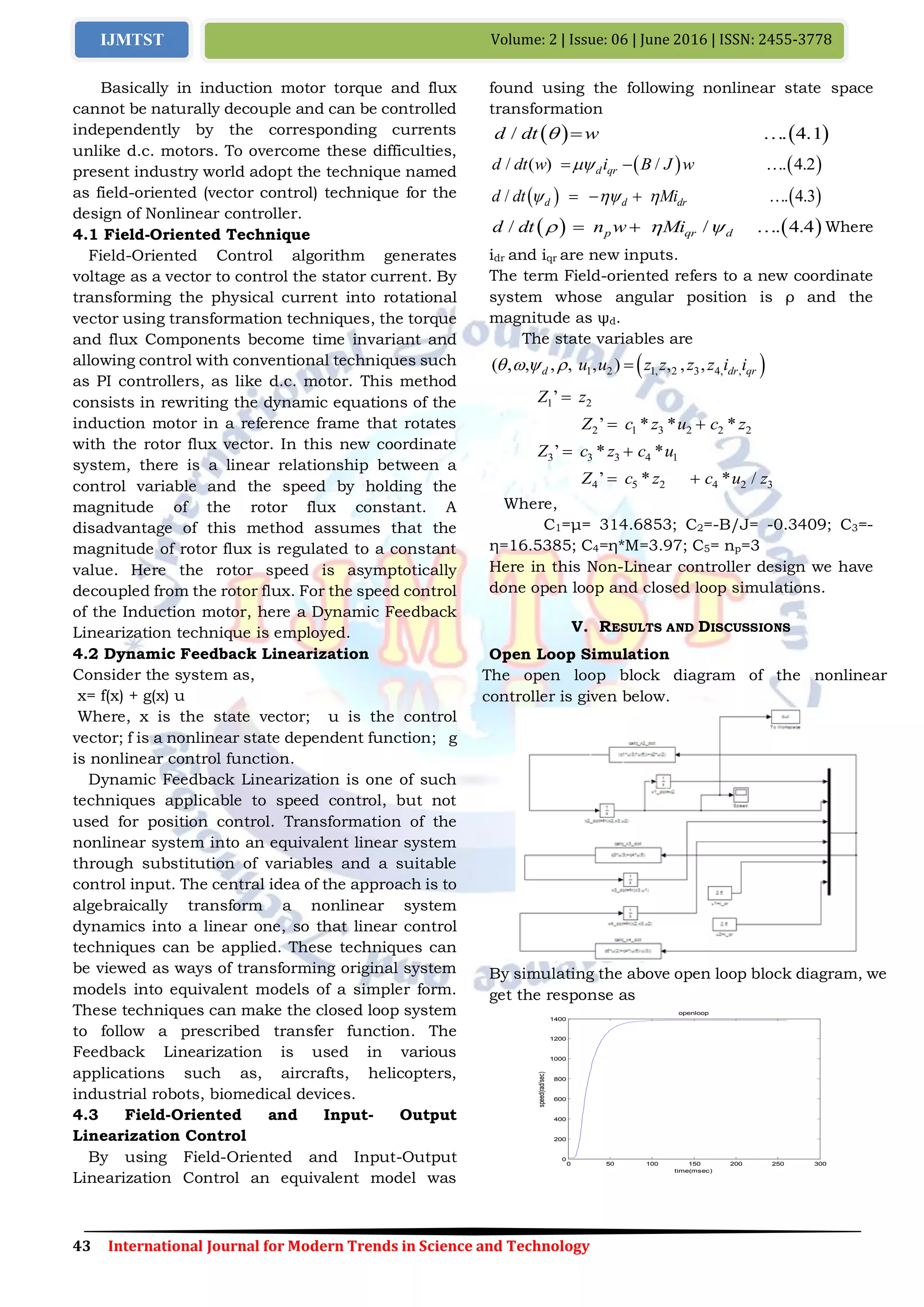
Design of a Linear and Non-linear controller for Induction Motor
Closed Loop Simulation
The closed loop block diagram of non-linear
controller is given below
By simulating the above closed loop block diagram,
we get the response as
For Sinusoidal Input as reference:
For Step Input:
For Ramp Input:
VI. CONCLUSION
In this paper unstable non-linear induction
motor response is stabilized by using PID controller
and LQR controller. The considered non-linear
dynamic equations of the induction motor are
linearized by using field oriented control using
dynamic feedback linearization techniques. Then
PID control techniques and LQR control techniques
were implemented on obtained linear equations
from non-linear controller. The response of the
plant with the use of both the controllers were
found satisfactorily stable than the response
without controllers.
It has been assumed that the non-linearities are
very small enough and hence neglected while
designing the LQR controller, but in practical
design these negligence of small nonlinearities may
also cause severe disaster. As such a non-linear
controller is designed by using dynamic feedback
linearization. It is found that the speed output
tracks the reference input waveform. Here it is
assumed that the random input signals are sine,
step and Ramp waveforms. Then the simulations
are performed to find the error plot. The main aim
is to reduce the error to a maximum extent using
the mentioned control techniques. In these cases
the error is minimized with respect to time with the
help of the above mentioned controllers. Thus the
present thesis recommends the use of controllers
for the induction motor so as to obtain desired
response.
REFERENCES
[1] High-performance Induction Motor control Via
Input-Output Linearization, Marc Bodson, John
chiasson and Robert Novotnak, Proceedings, IEEE
control systems,0272-1708/94/1994IEEE.
[2] Input-Output Linearizing and Decoupling Control of
an Induction Motor Drive; Dr K B Mohanty, vol
88,September 2007.
[3] Pakki Bharani Chandra Kumar and
M.Venkateswara Rao, Enhancement of excitation
controllers using linear and non-linear control in
Power Systems ,proceedings of national conference
on DREEM-06, pp 22-26, 01-02 Dec
06,GI-TAM,Vishakhapatnam,India.
[4] High performance adaptive Field-Oriented Model
Reference Control Of Induction Motor,
Noureddine Golea, Amar Golea, Journal of Electrical
Engineering, Vol. 57, NO.2, 2006, 78-86.
[5] Applied Non linear Control, Jean –Jacques E.slotine,
Massachusetts Institute of Technology. Weiping LI
Massachusetts Institute of Technology
0 5 10 15 20 25 30 35 40 45 50
0
500
1000
1500
time(sec)
speed(rad/sec)
sinusoidal wave as reference
0 5 10 15 20 25 30 35 40 45 50
0
500
1000
1500
time(sec)
speed(rad/sec)
STEP INPUT AS REFERENCE
0 5 10 15 20 25 30 35 40 45 50
0
5
10
15
20
25
30
35
40
45
50
time(sec)
speed(rad/sec)
RAMP INPUT AS REFERENCE](https://image.slidesharecdn.com/76-160628153723/75/Design-of-a-Linear-and-Non-linear-controller-for-Induction-Motor-6-2048.jpg)

This document describes the design of linear and non-linear controllers for an induction motor. It begins by introducing induction motors and their nonlinear dynamics. It then presents the mathematical model of an induction motor. Next, it describes the design of linear controllers using PID and LQR techniques by first linearizing the nonlinear system model. It also discusses designing a nonlinear controller using feedback linearization. Simulation results are presented to compare the performance of the designed controllers for speed control of the induction motor. The overall aim is to achieve speed control over a wide range using these advanced linear and nonlinear control techniques.










![[IJET-V1I4P8] Authors :T.Vignesh,V.Dileepan, P.Kannappar, R.Manoj Babu , P.E...](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i4p8-150810163314-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)


































































