Swarm intelligence is inspired by the collective behavior of social insects like ants and bees. It involves the decentralized control of groups of simple agents interacting locally with each other and their environment. Some key points covered:
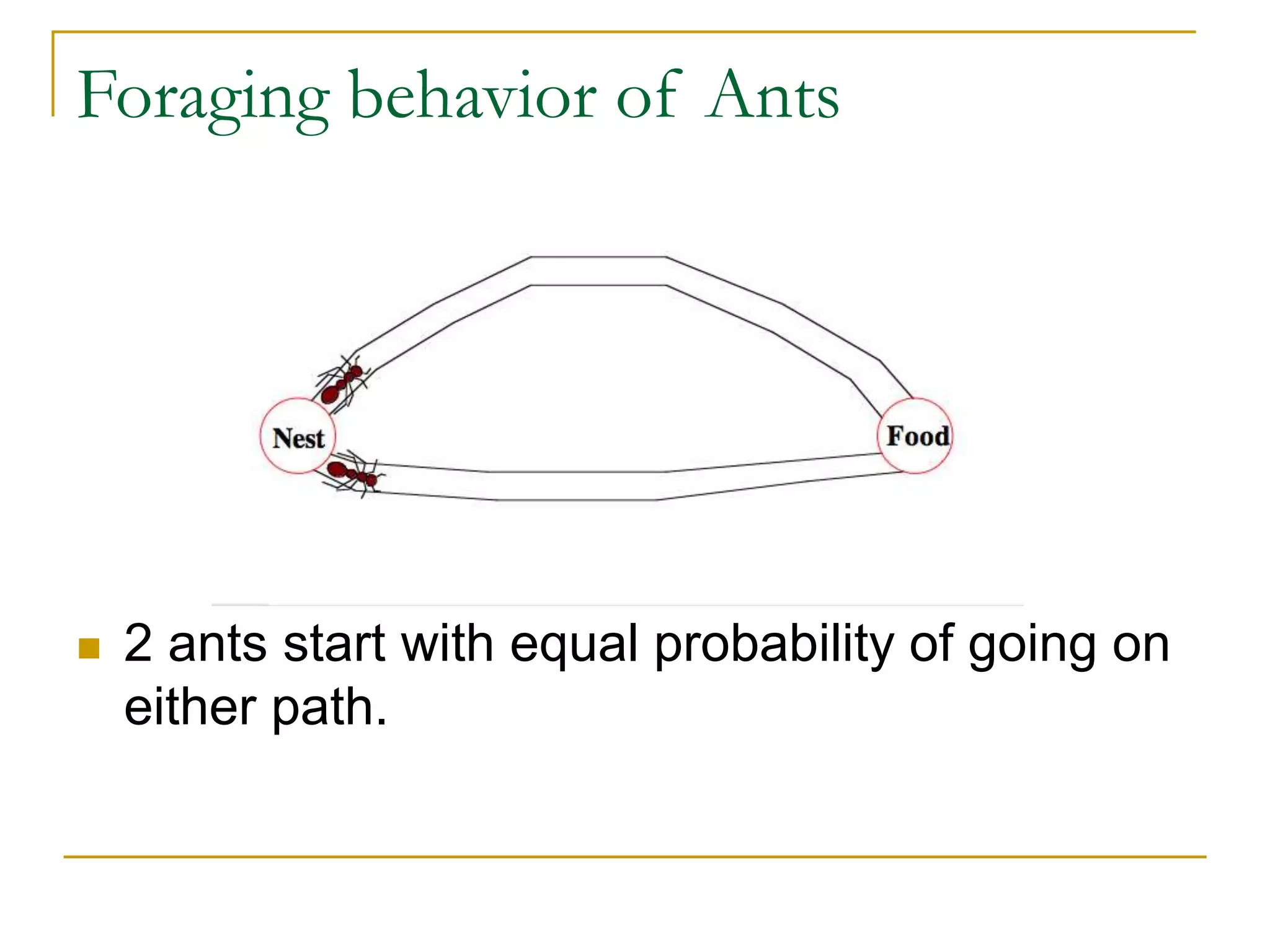
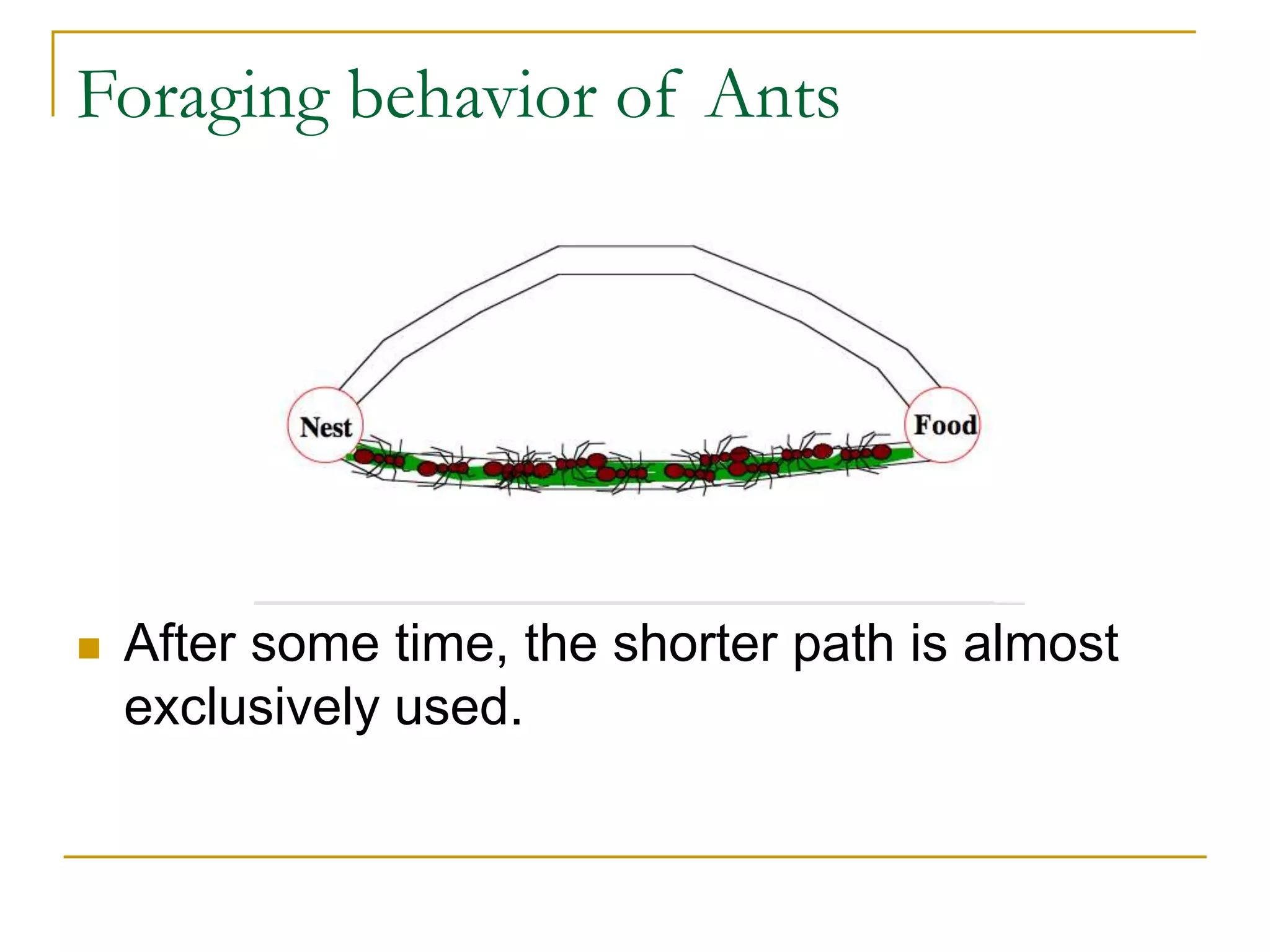
- Particle swarm optimization and ant colony optimization are two popular swarm intelligence algorithms. They are inspired by bird flocking and ant foraging behavior respectively.
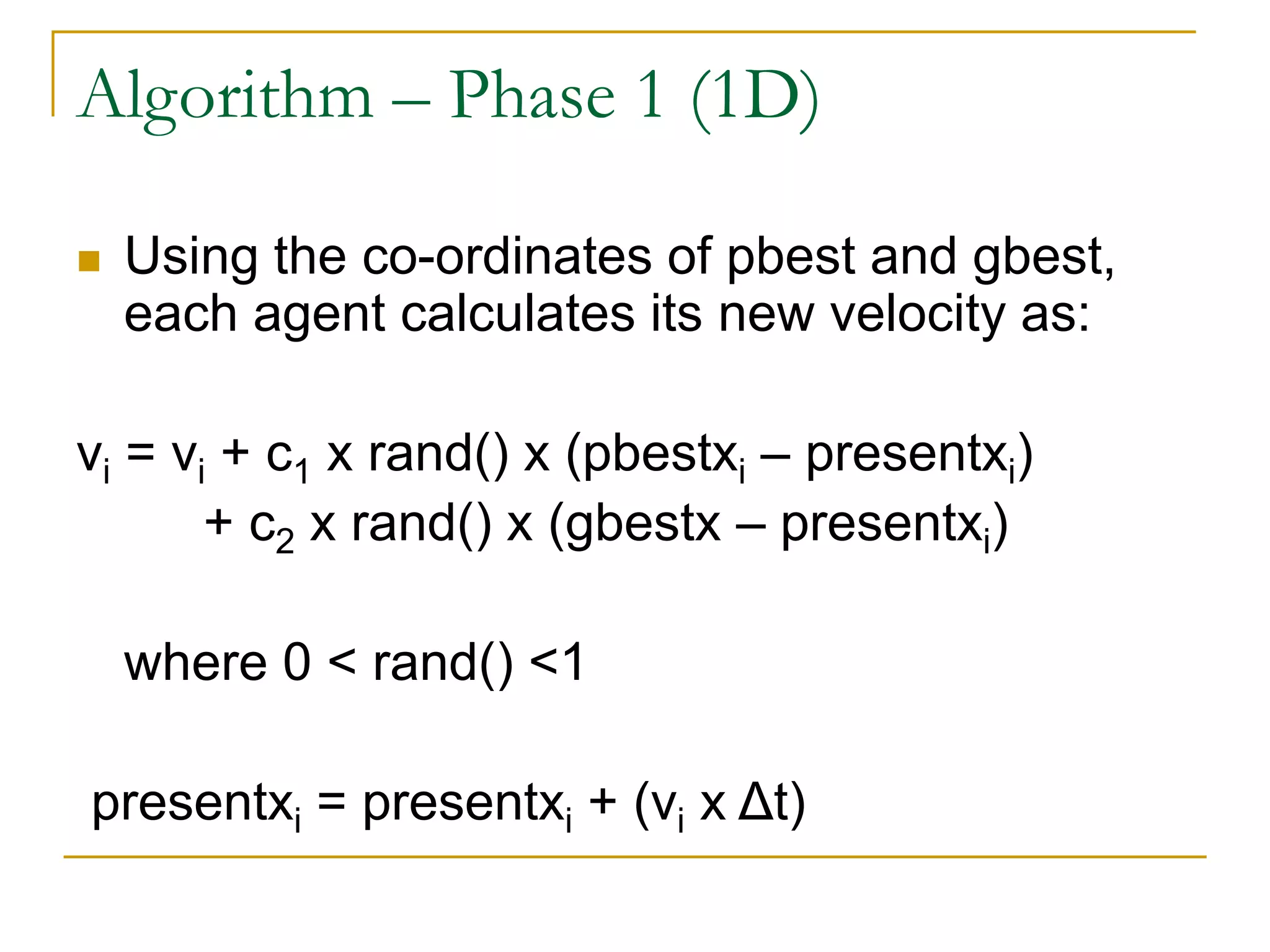
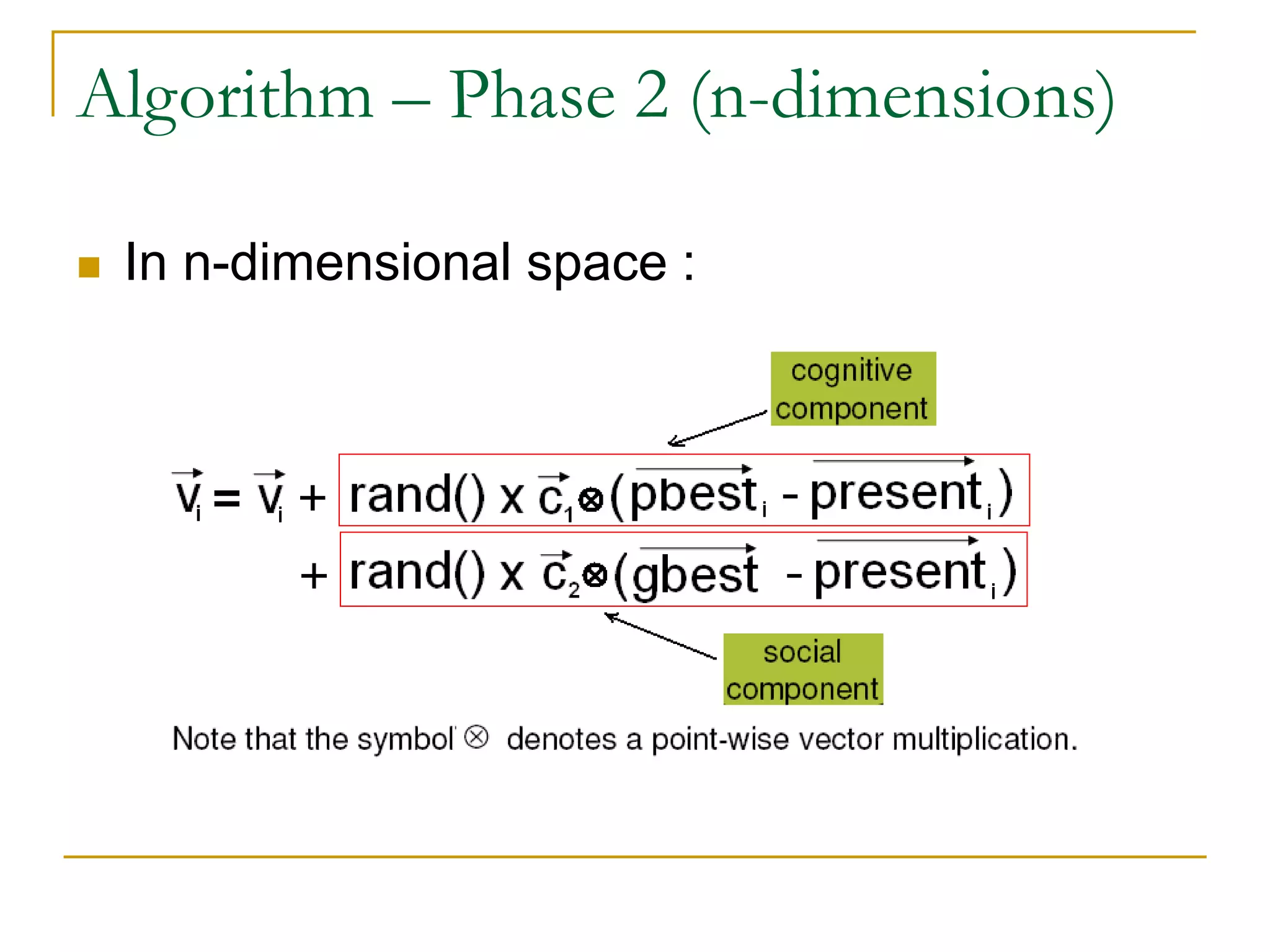
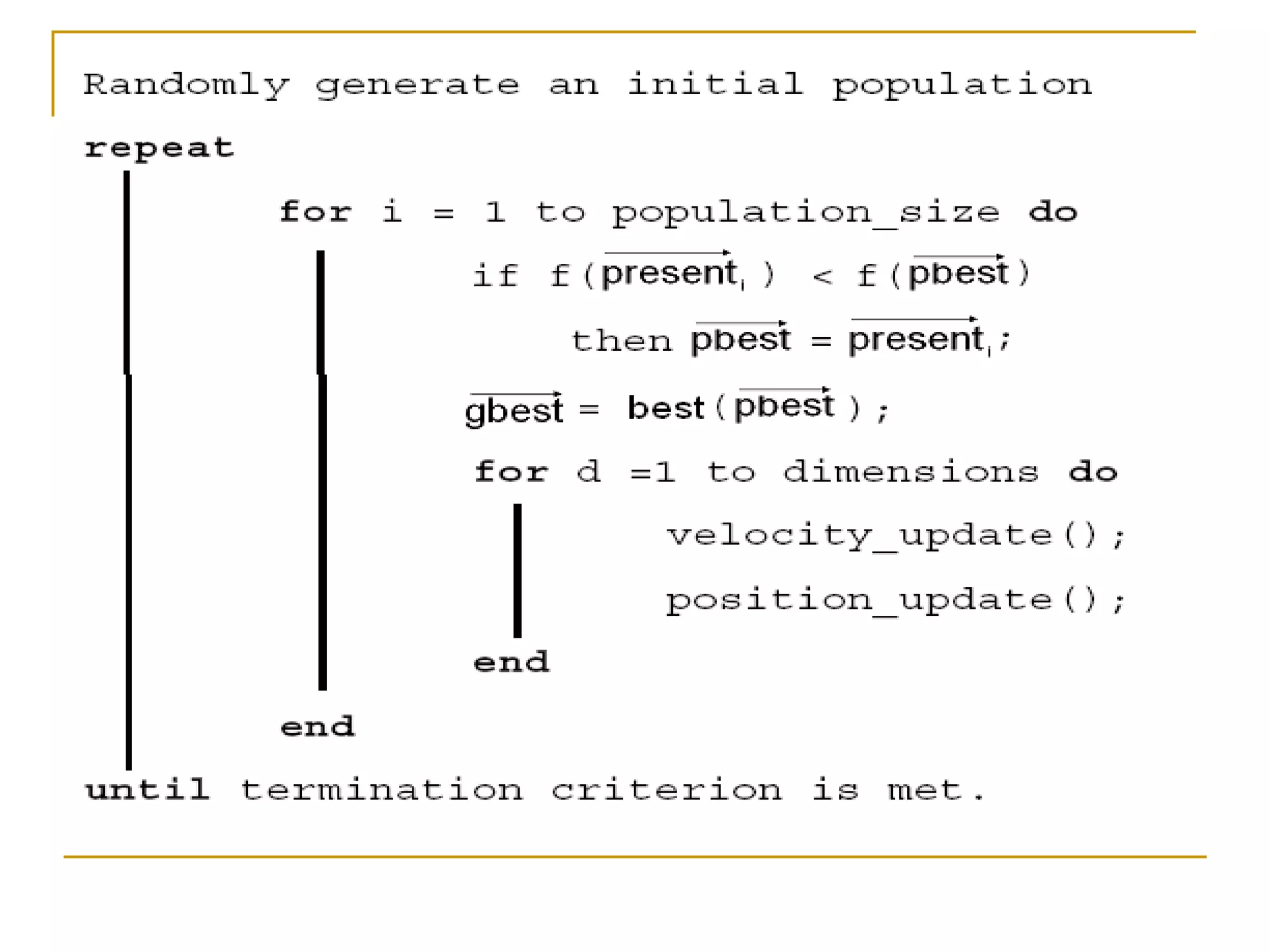
- PSO mimics social interaction to optimize problems. Each agent updates its position based on its own experience and neighboring agents. ACO uses simulated ants depositing pheromones to probabilistically construct solutions.
- Swarm intelligence systems are robust, relatively simple, and can achieve complex functions through self-organization and emergence. They have applications in routing

![Swarm Intelligence - Definition
“any attempt to design algorithms or
distributed problem-solving devices inspired
by the collective behavior of social insect
colonies and other animal societies”
[Bonabeau, Dorigo, Theraulaz: Swarm
Intelligence]
Solves optimization problems](https://image.slidesharecdn.com/cs621-lect7-si-13aug07-230317084058-3e777c27/75/cs621-lect7-SI-13aug07-ppt-11-2048.jpg)