


![PROPORTIONAL
CONTROL
We can then find a gain to place the closed-
loop poles in the desired region by
employing the rlocfind command
specific loop gain
[Kp,poles]=rlocfind(P_cruise)
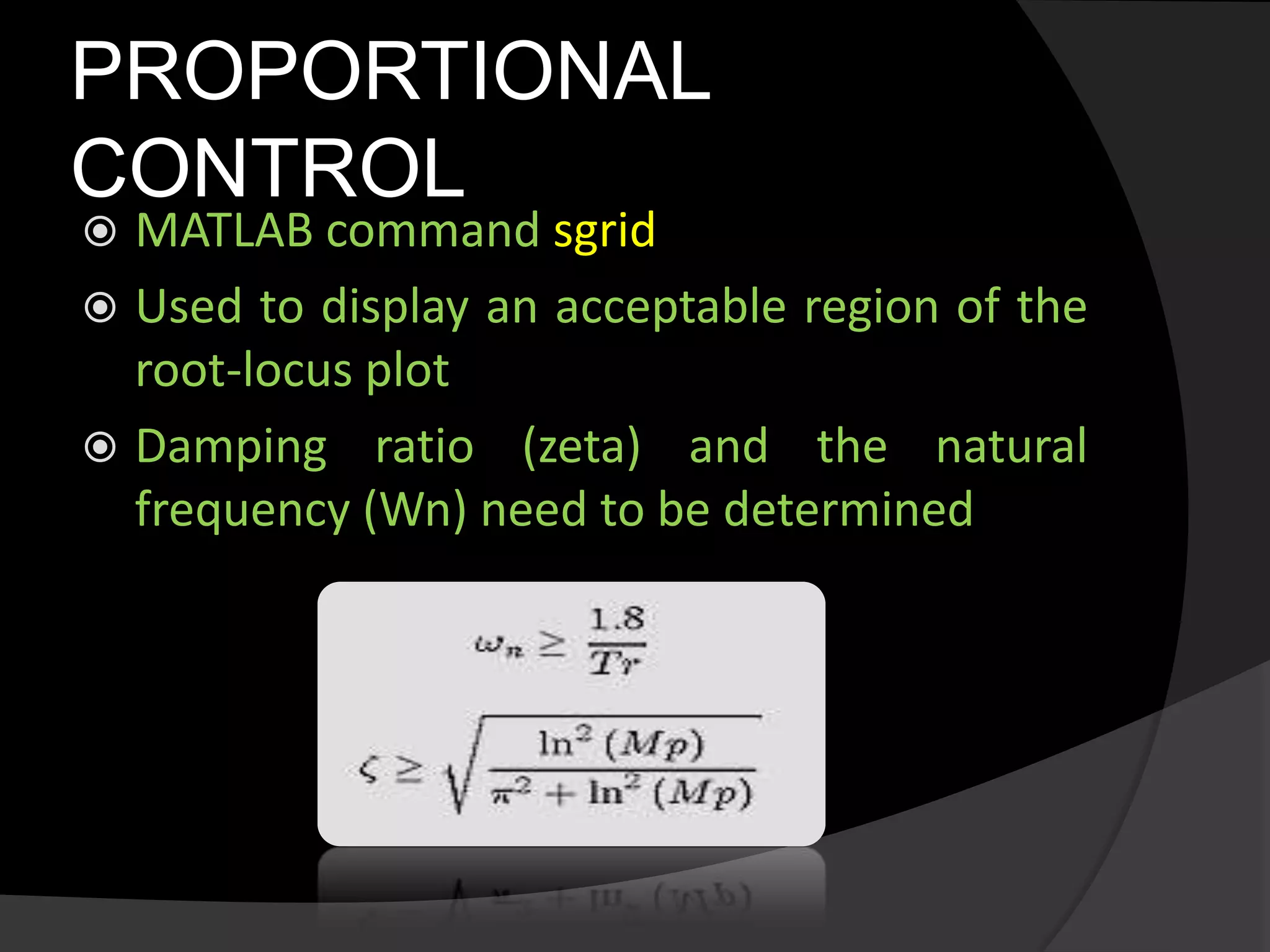
In between the dotted lines (zeta > 0.6) and
outside the semi-ellipse (wn > 0.36)](https://image.slidesharecdn.com/cruisecontrolsimulationusingmatlab-130604161512-phpapp01/75/Cruise-control-simulation-using-matlab-15-2048.jpg)


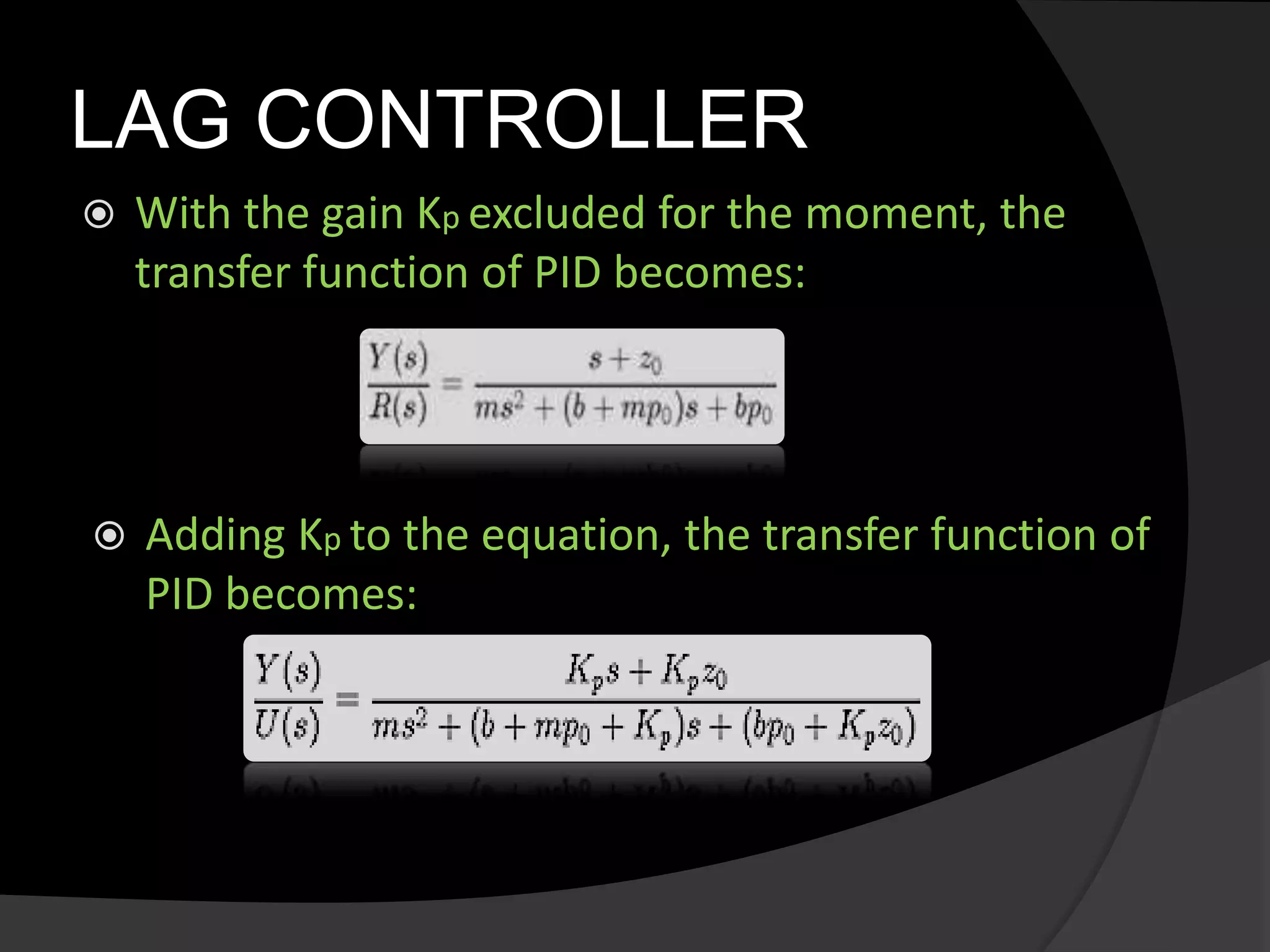

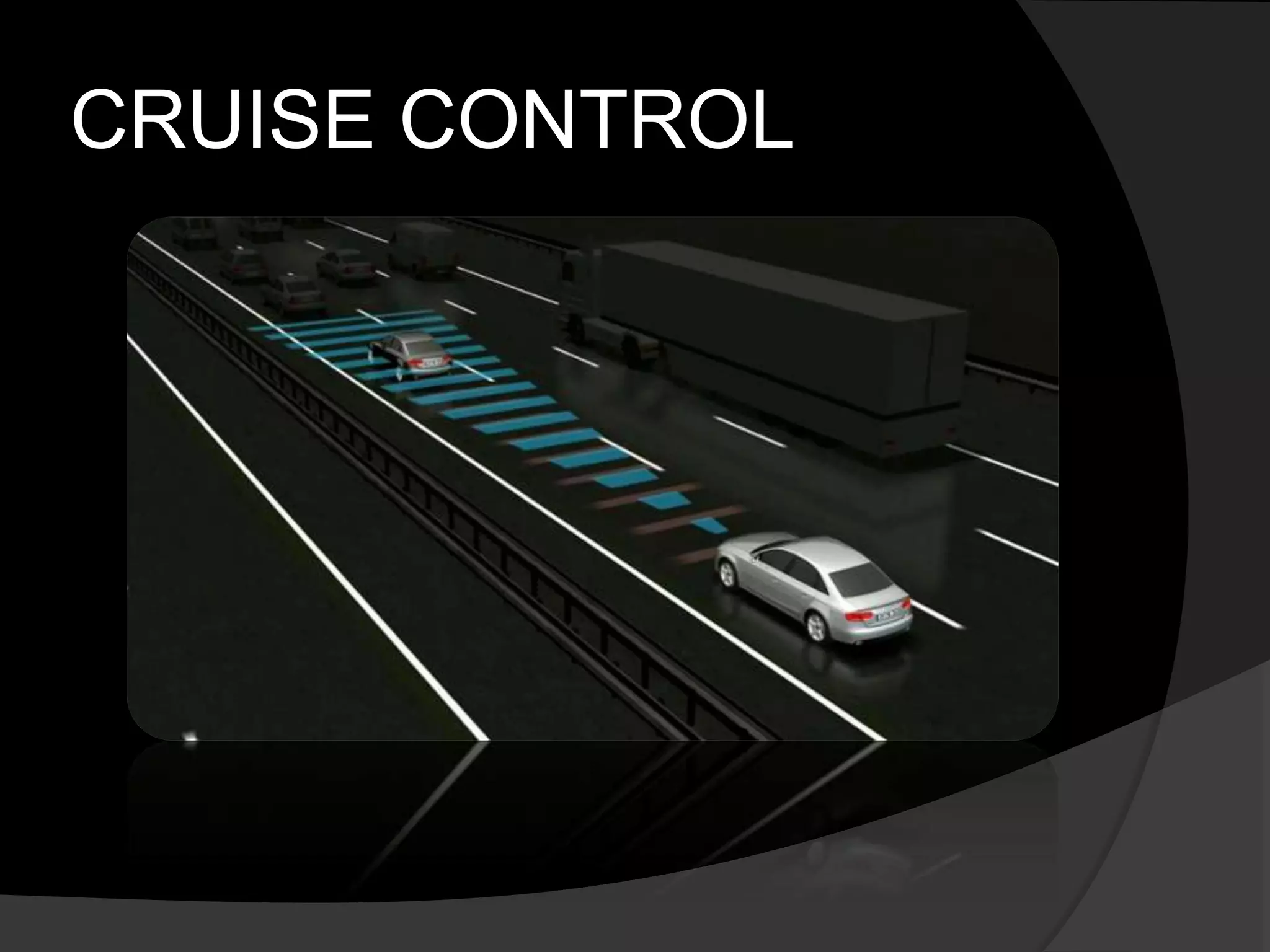
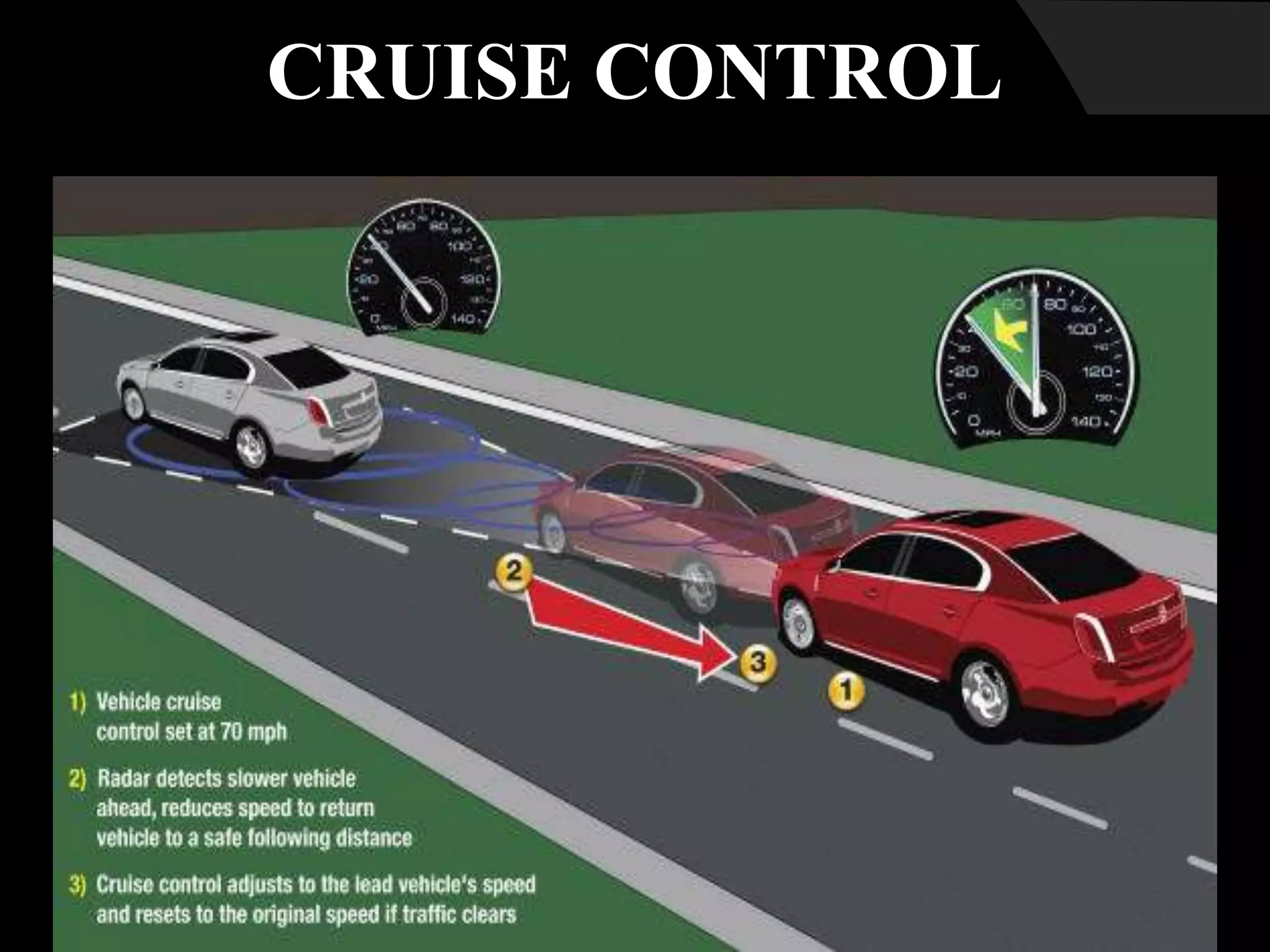
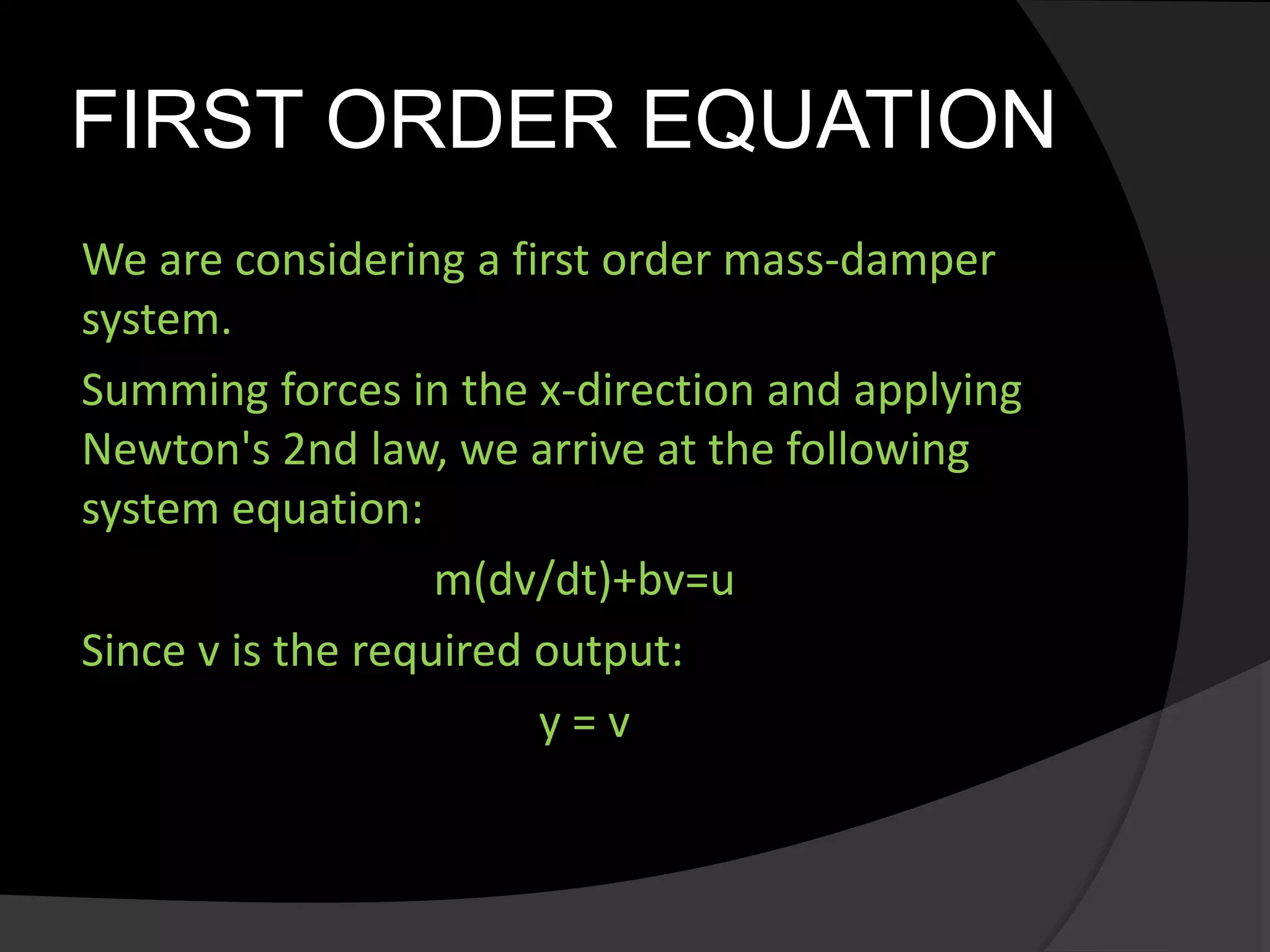
Cruise control systems use feedback control to maintain a constant vehicle speed set by the driver. A cruise control system measures the current vehicle speed, compares it to the desired speed, and automatically adjusts the throttle according to a control law to account for external disturbances. Modeling the vehicle as a first order mass-damper system and applying Newton's second law derives the system transfer function. A proportional controller meets some performance criteria, but a lag controller is also needed to reduce the steady-state error to within acceptable limits.