Downloaded 312 times
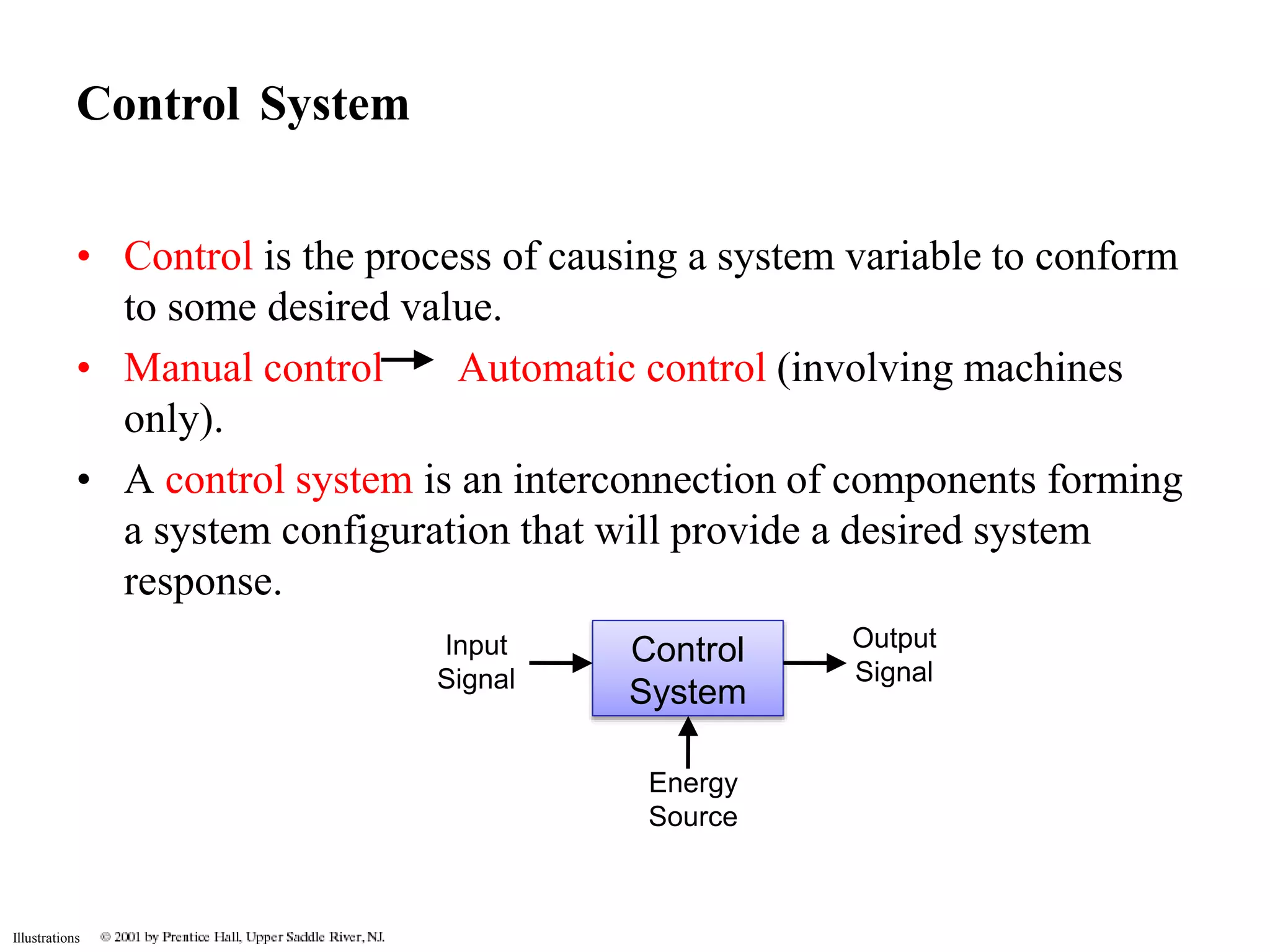

This document provides an overview of control systems. It defines a control system as an interconnection of components that provides a desired response. It discusses open and closed loop systems, control system classification, components, design process, examples, and the future of control systems. The document is being used to provide background on control principles and their engineering applications for a class.
Introduction to Control Systems lecture by Engr: M Irfan Khan.
Overview of control principles, basic mathematical tools like Laplace transforms and stability analysis.
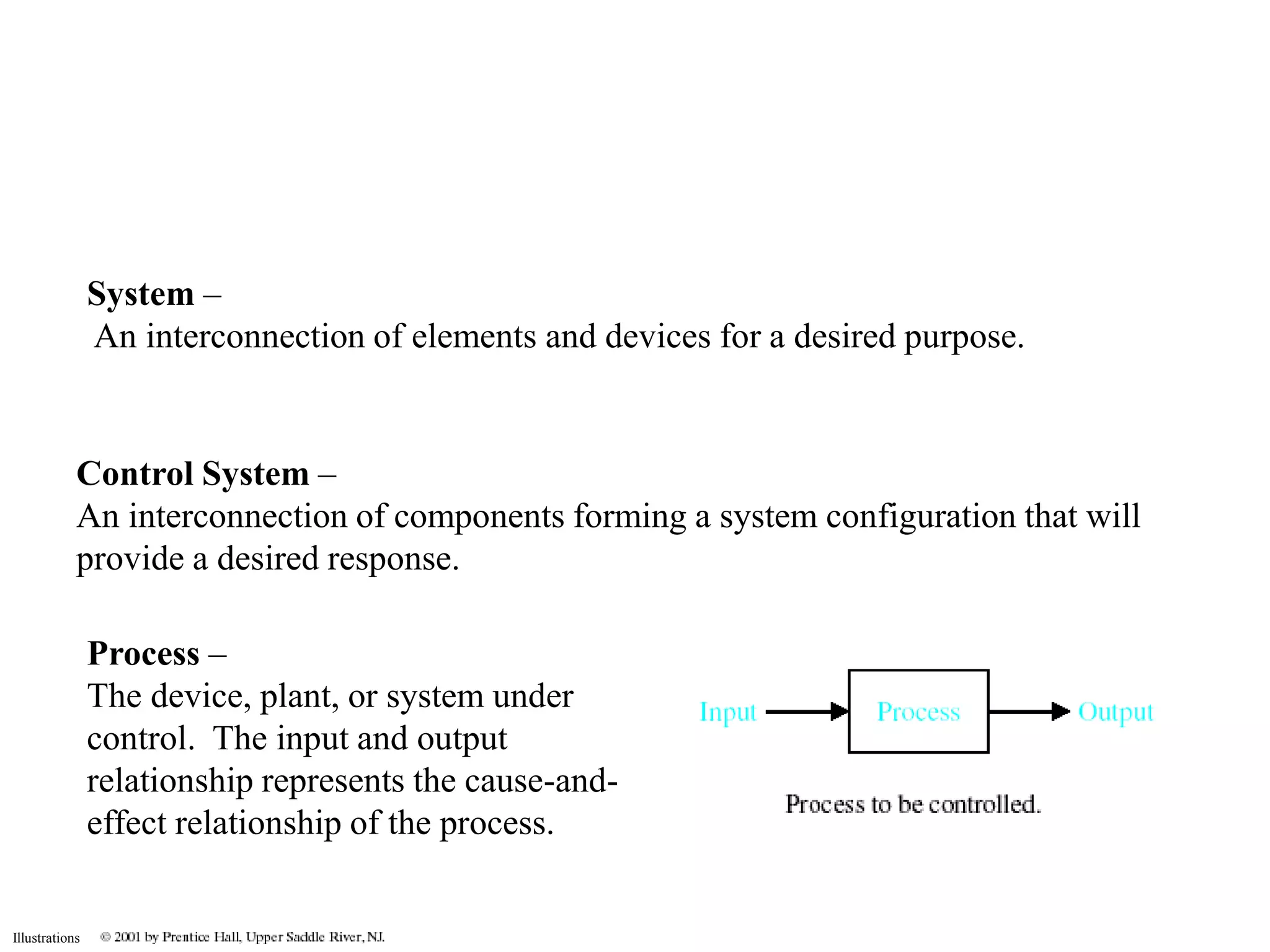
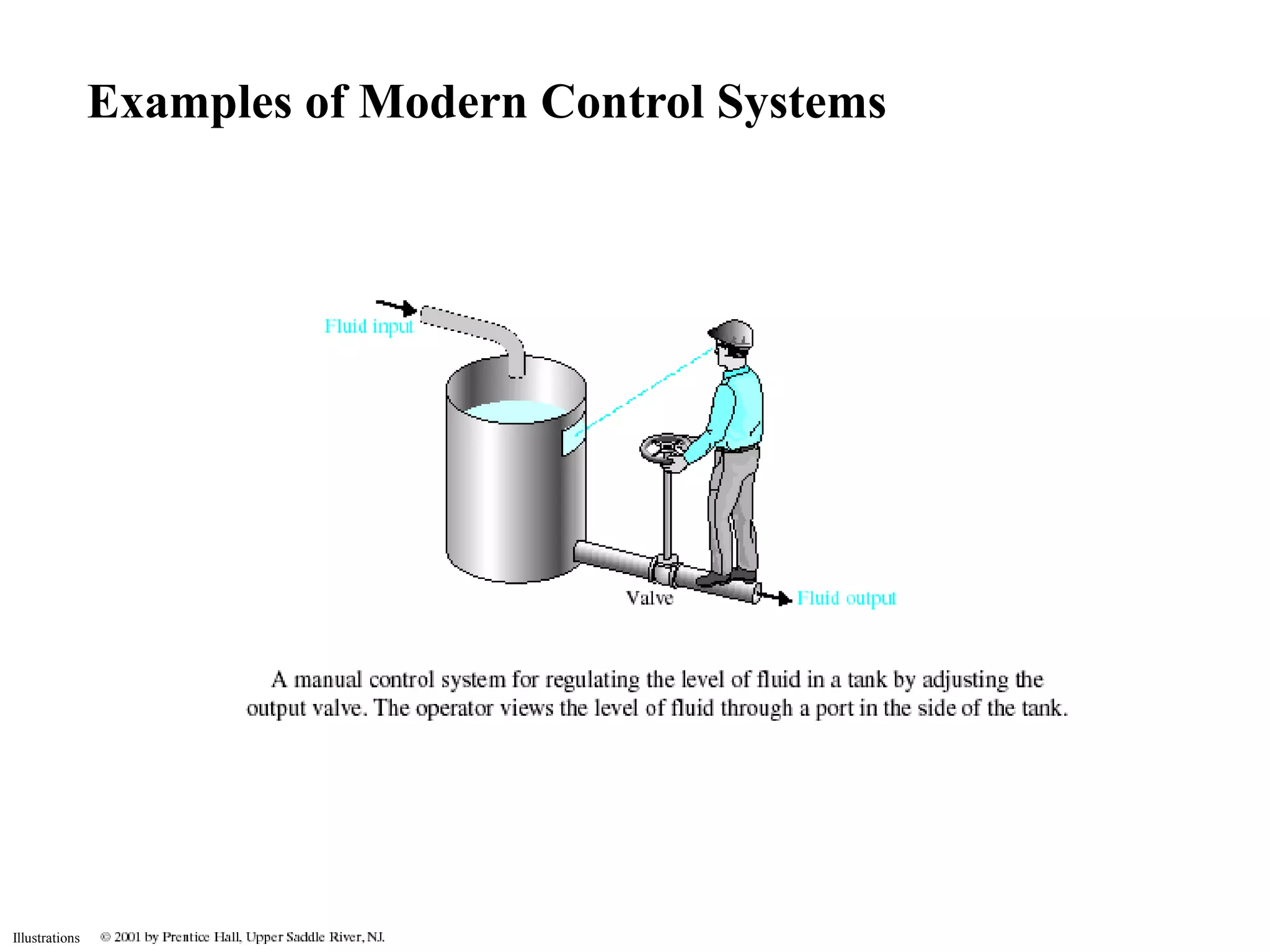
Definitions of system, control system and process; manual vs automatic control concepts.
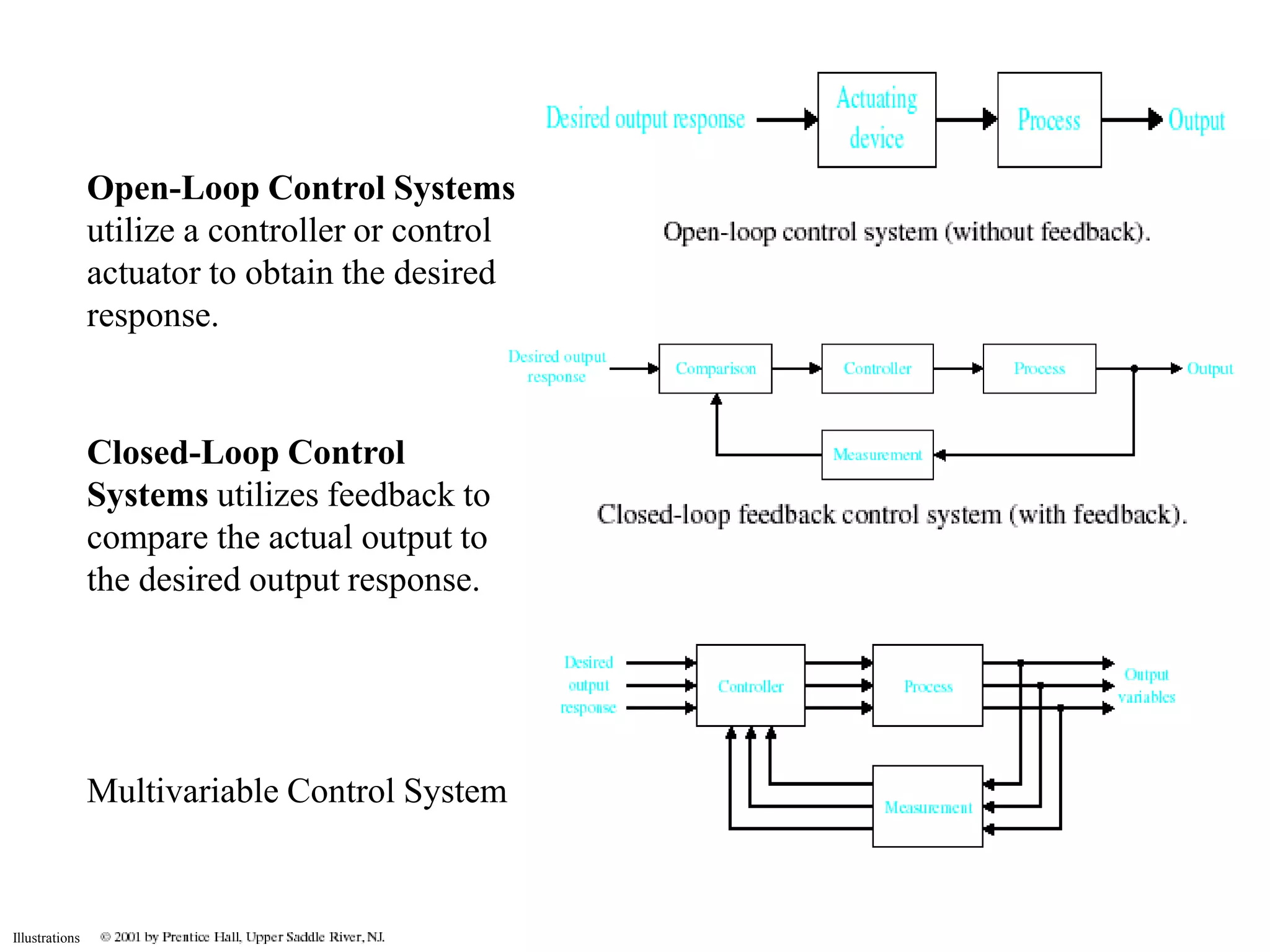
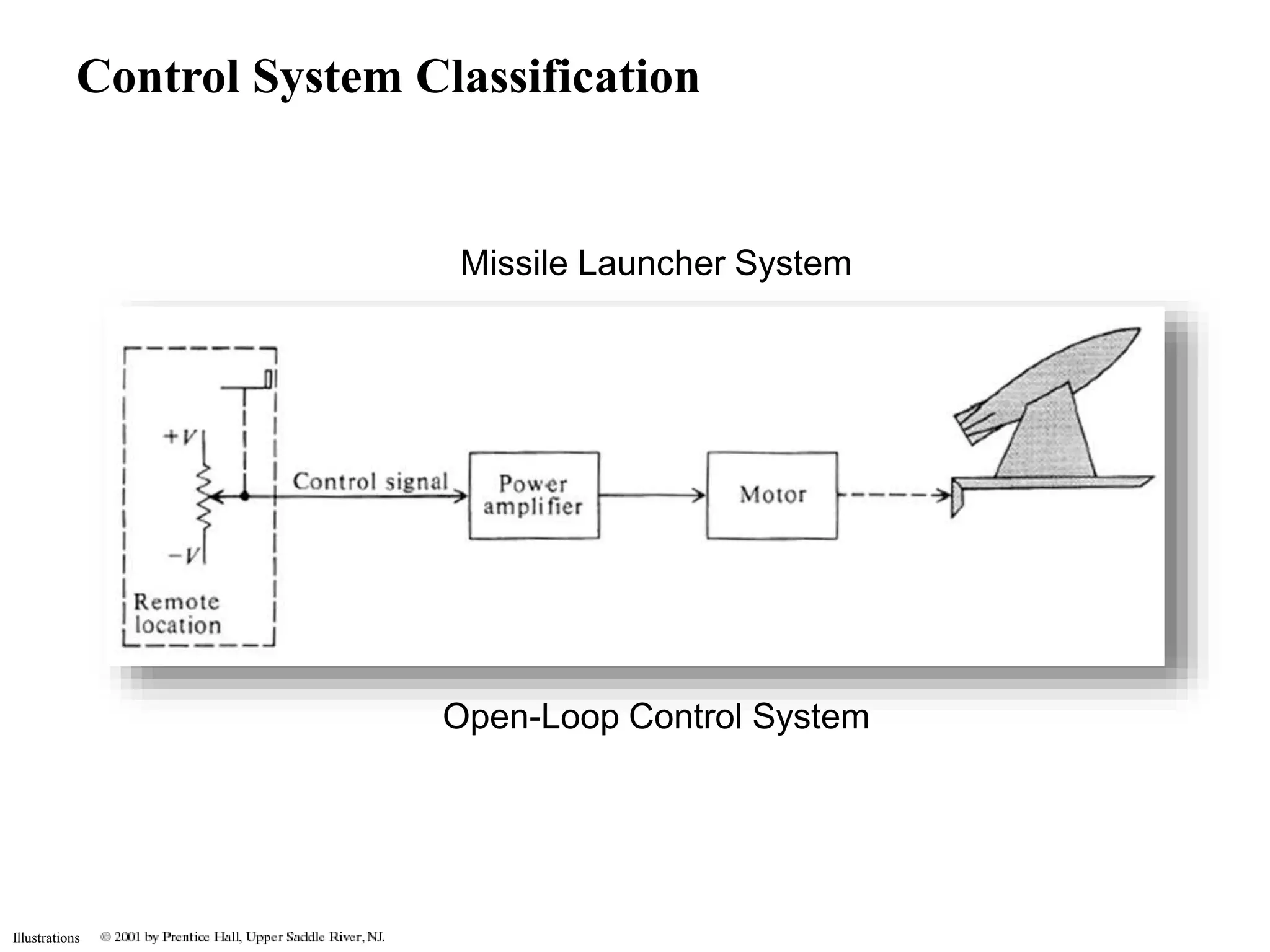
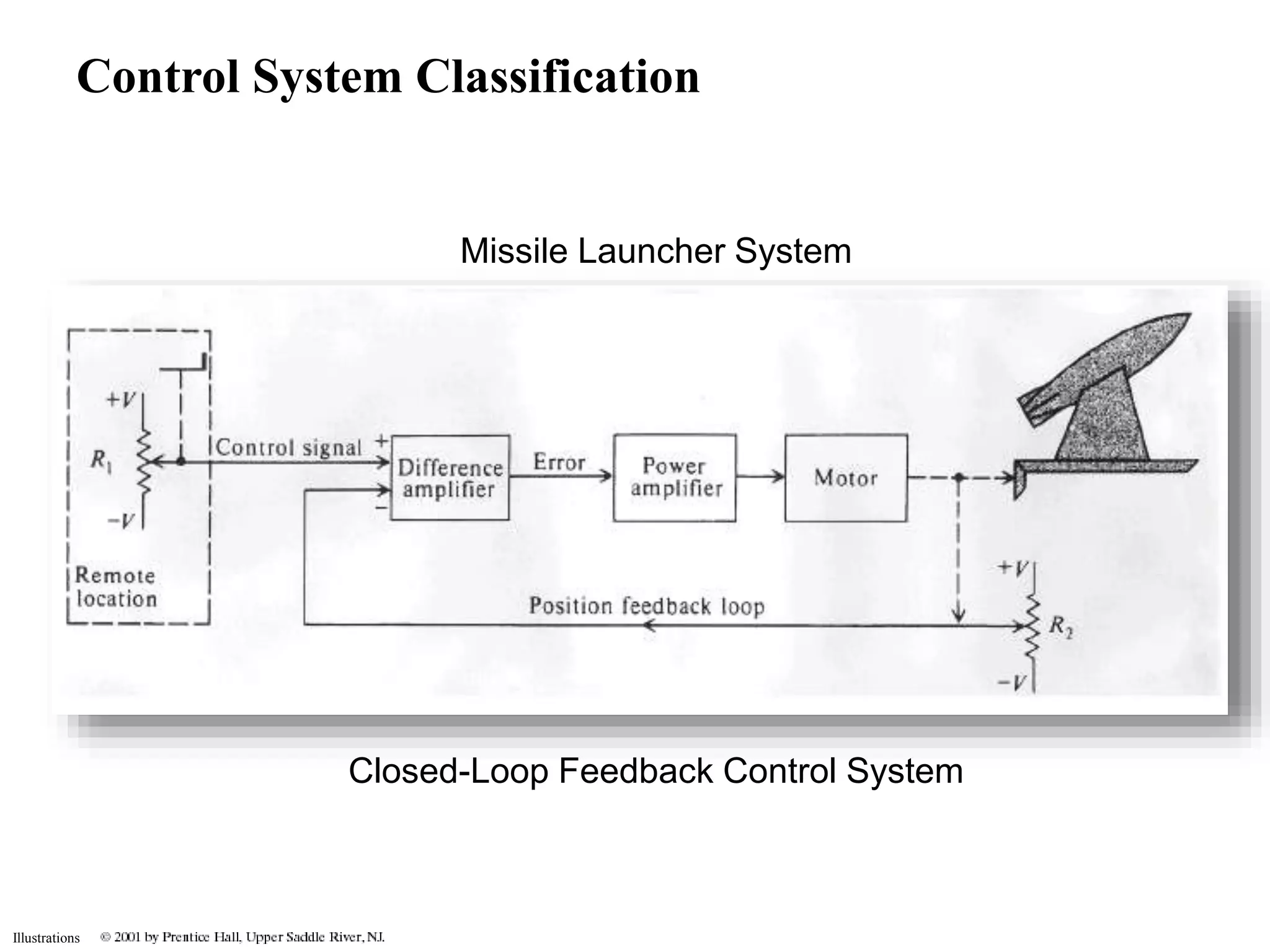
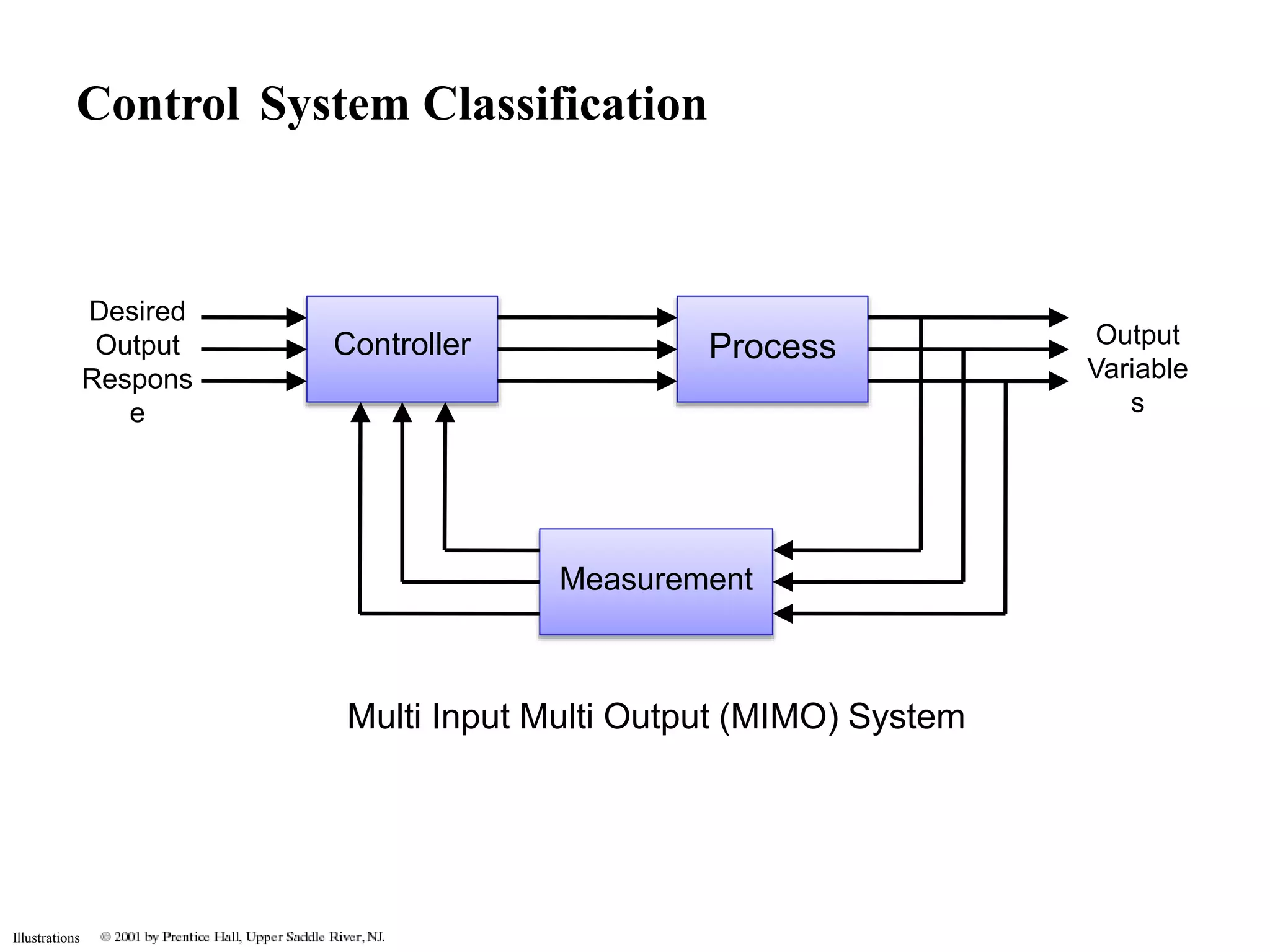
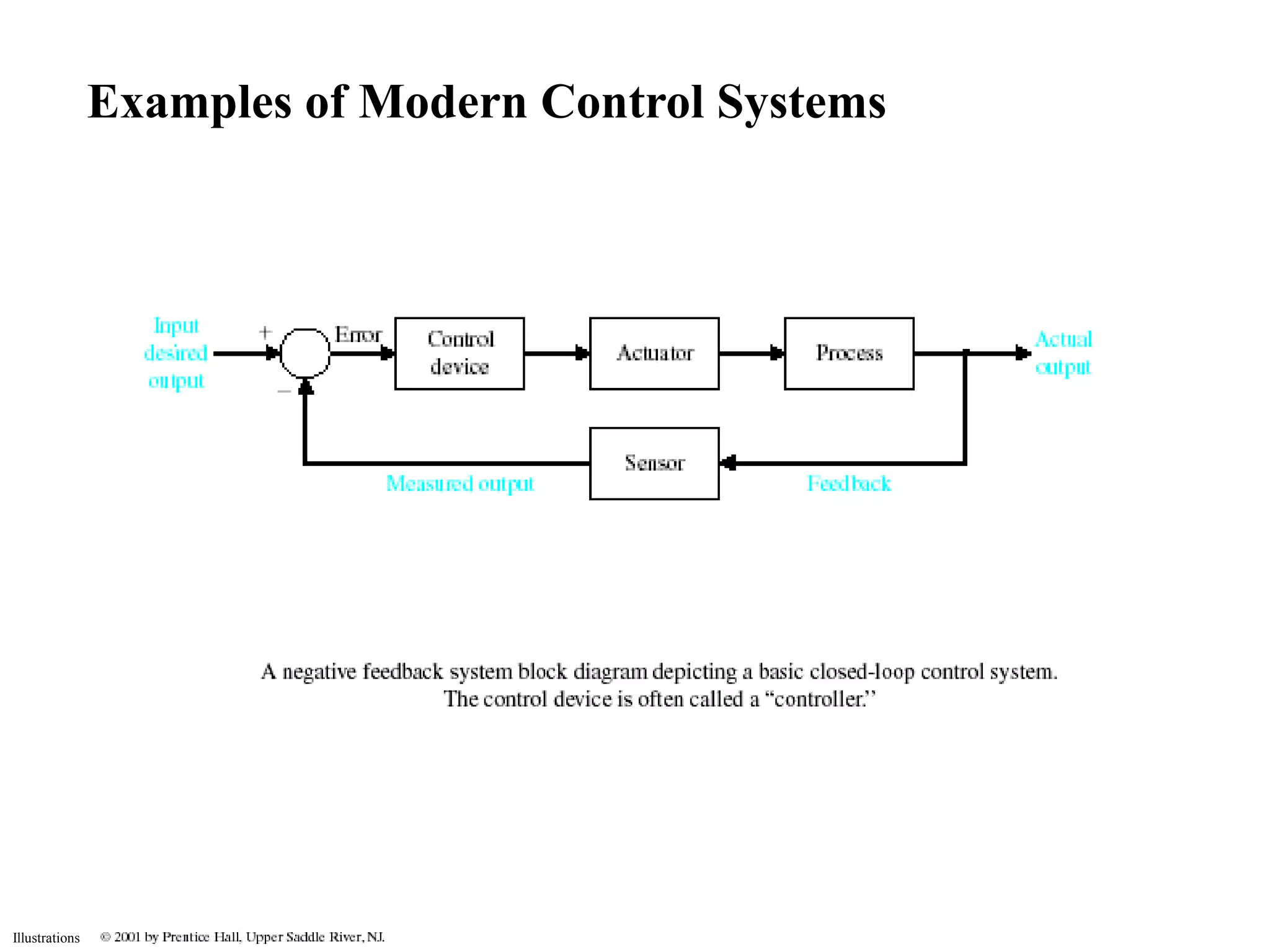
Classification of control systems including open-loop, closed-loop, multivariable, and MIMO systems.
Various purposes of control systems including power amplification, remote control, and disturbance compensation.
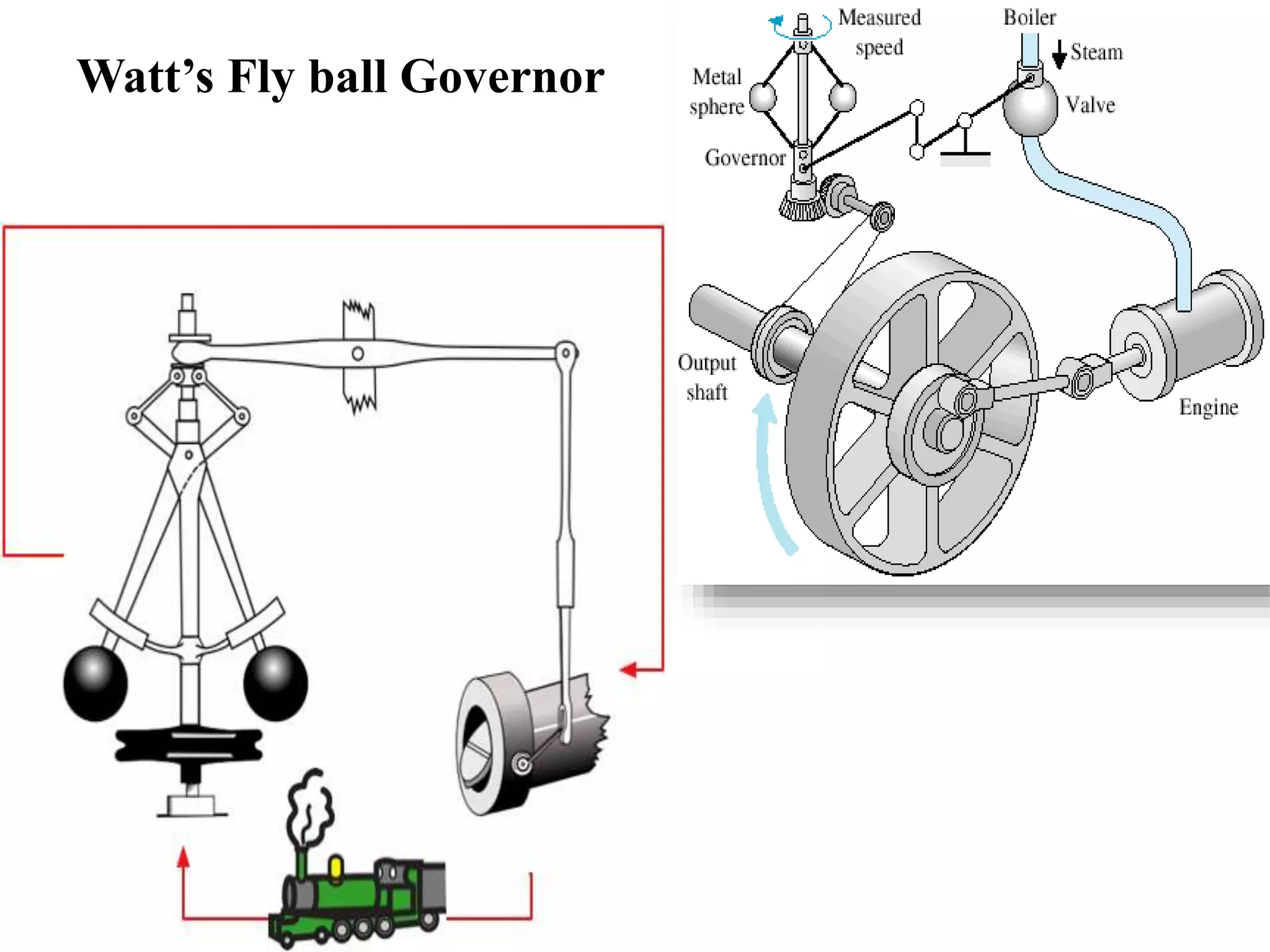
Timeline of control systems from ancient Greece to modern developments, highlighting key inventions and theorists.
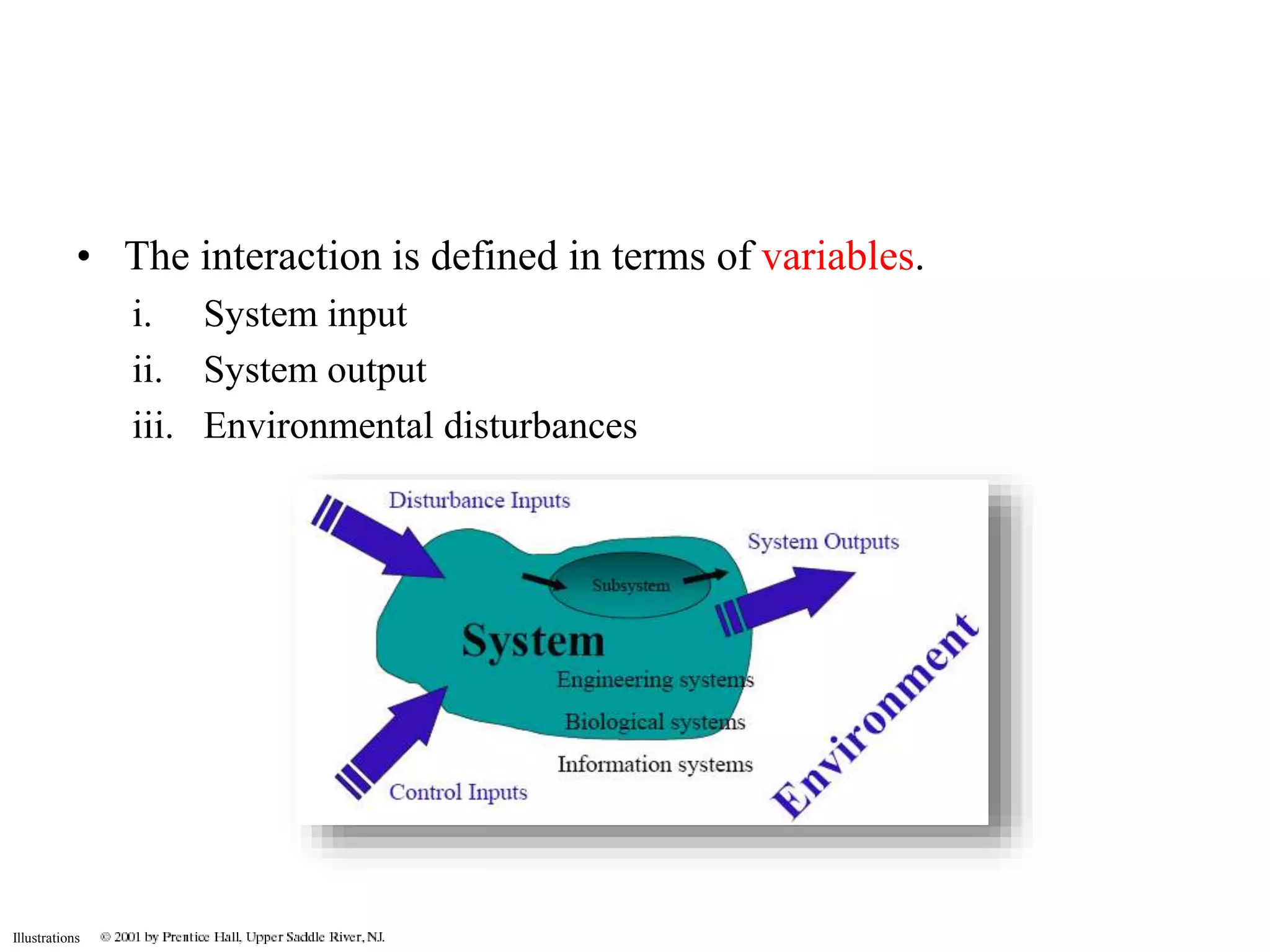
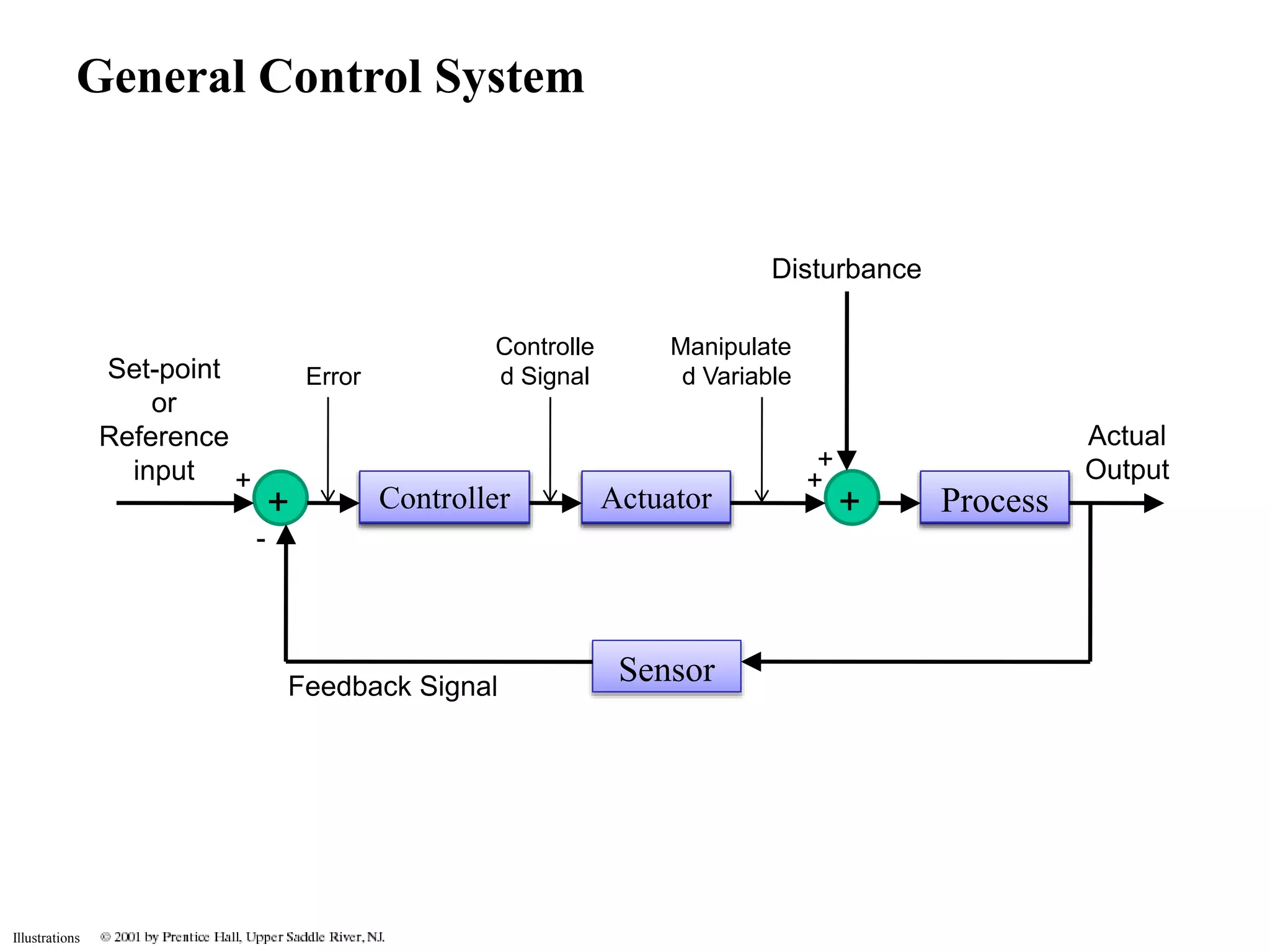
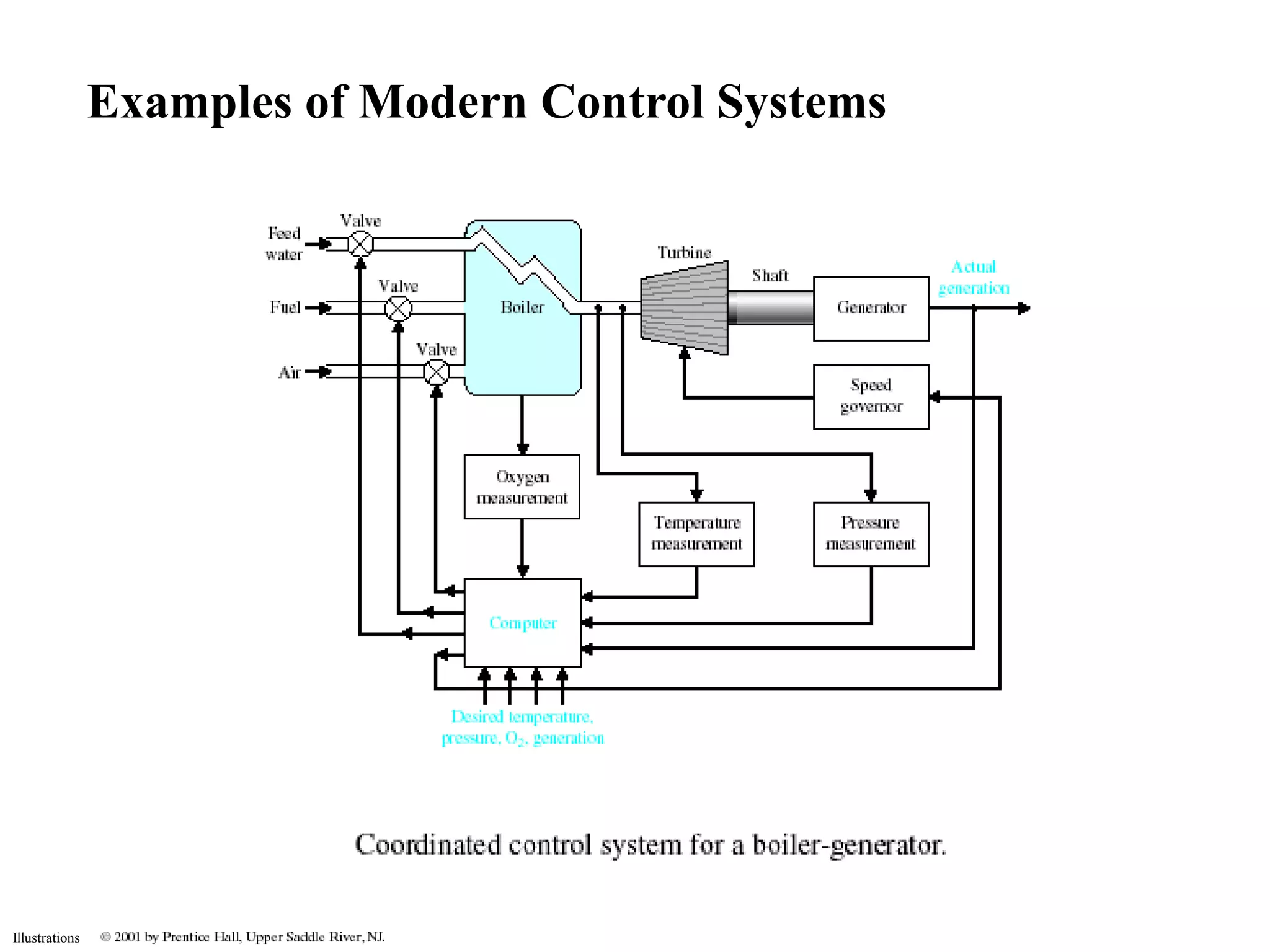
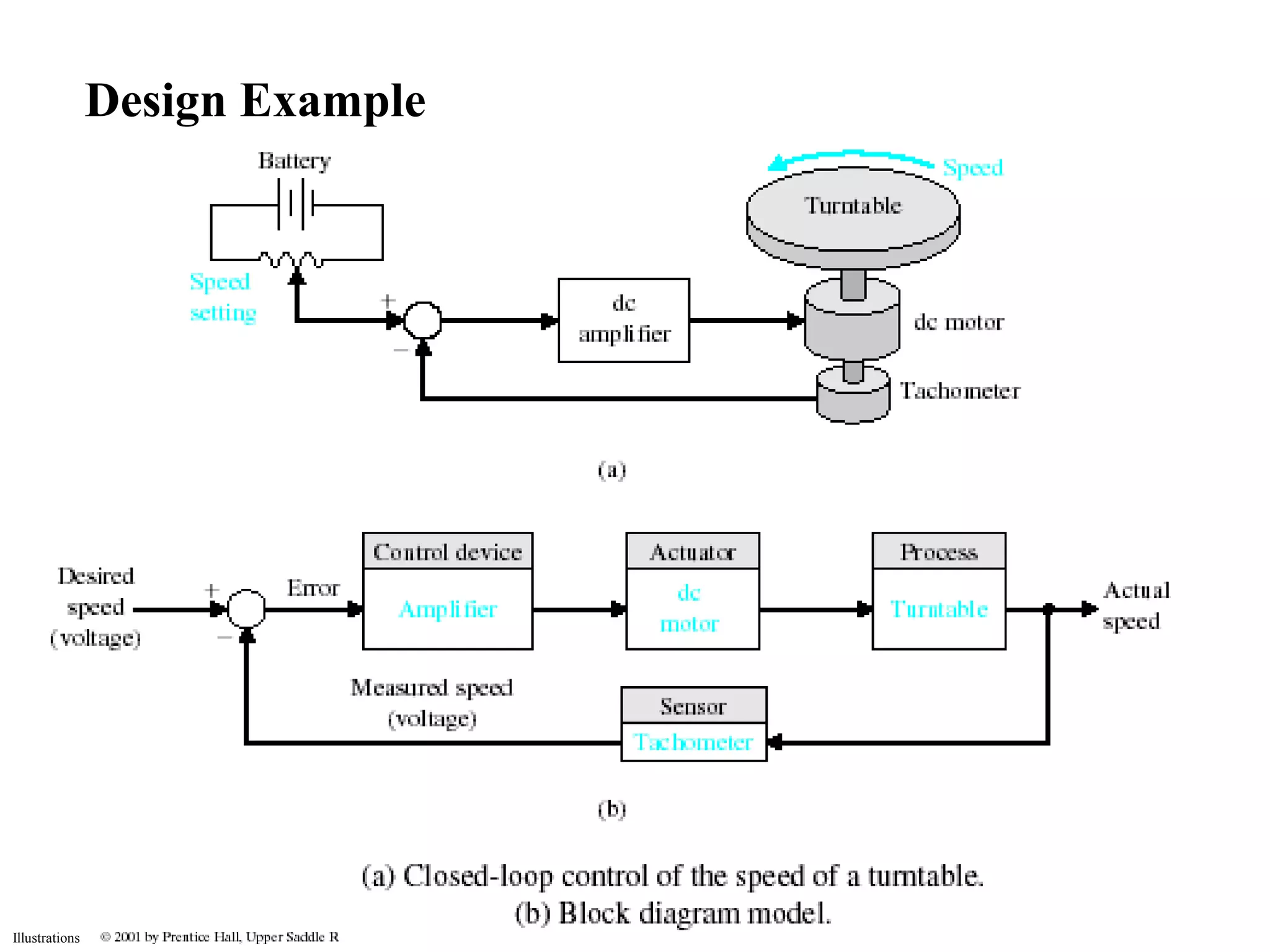
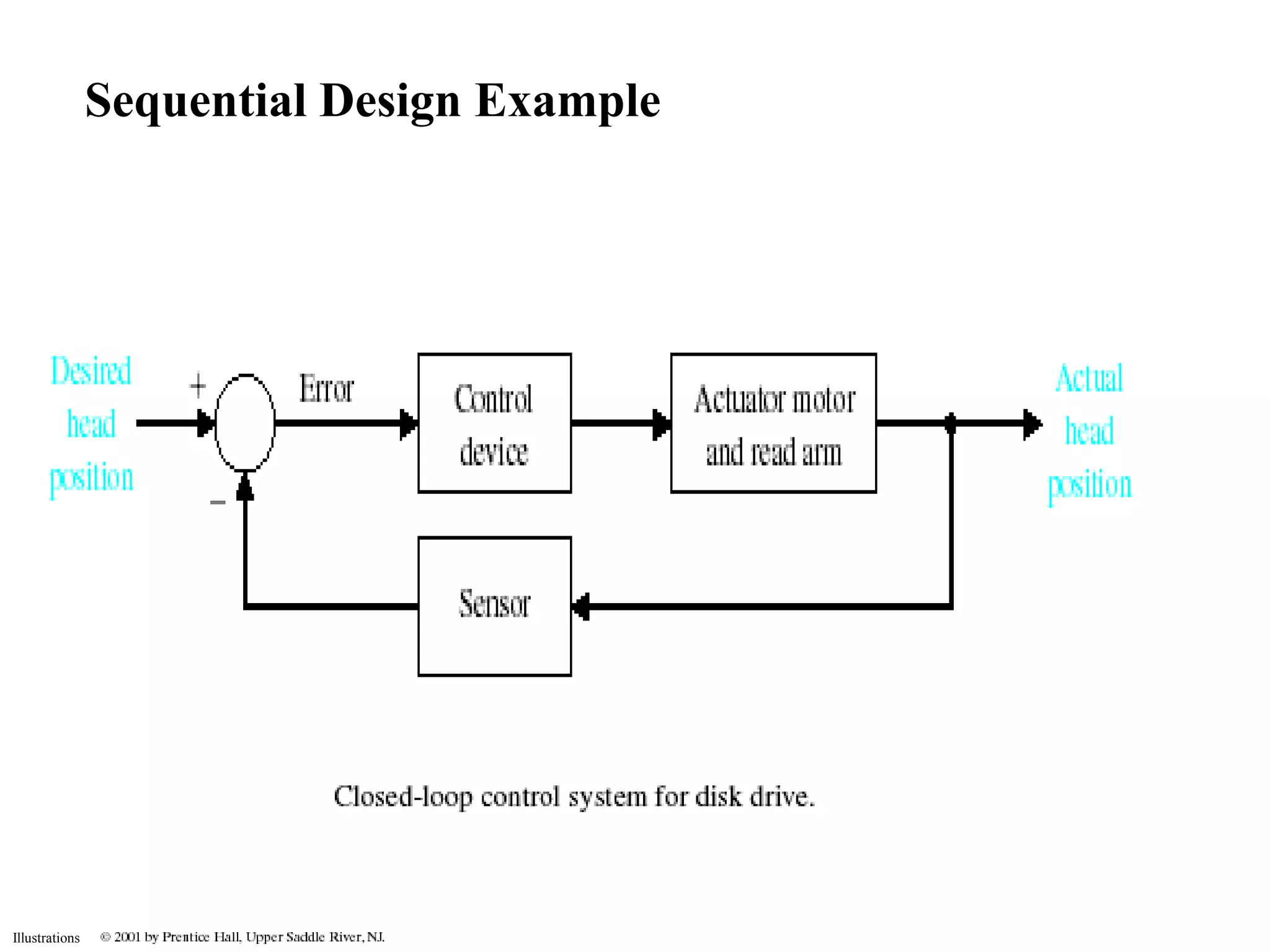
Discussion of components in control systems, including sensors, actuators, and the general system setup.
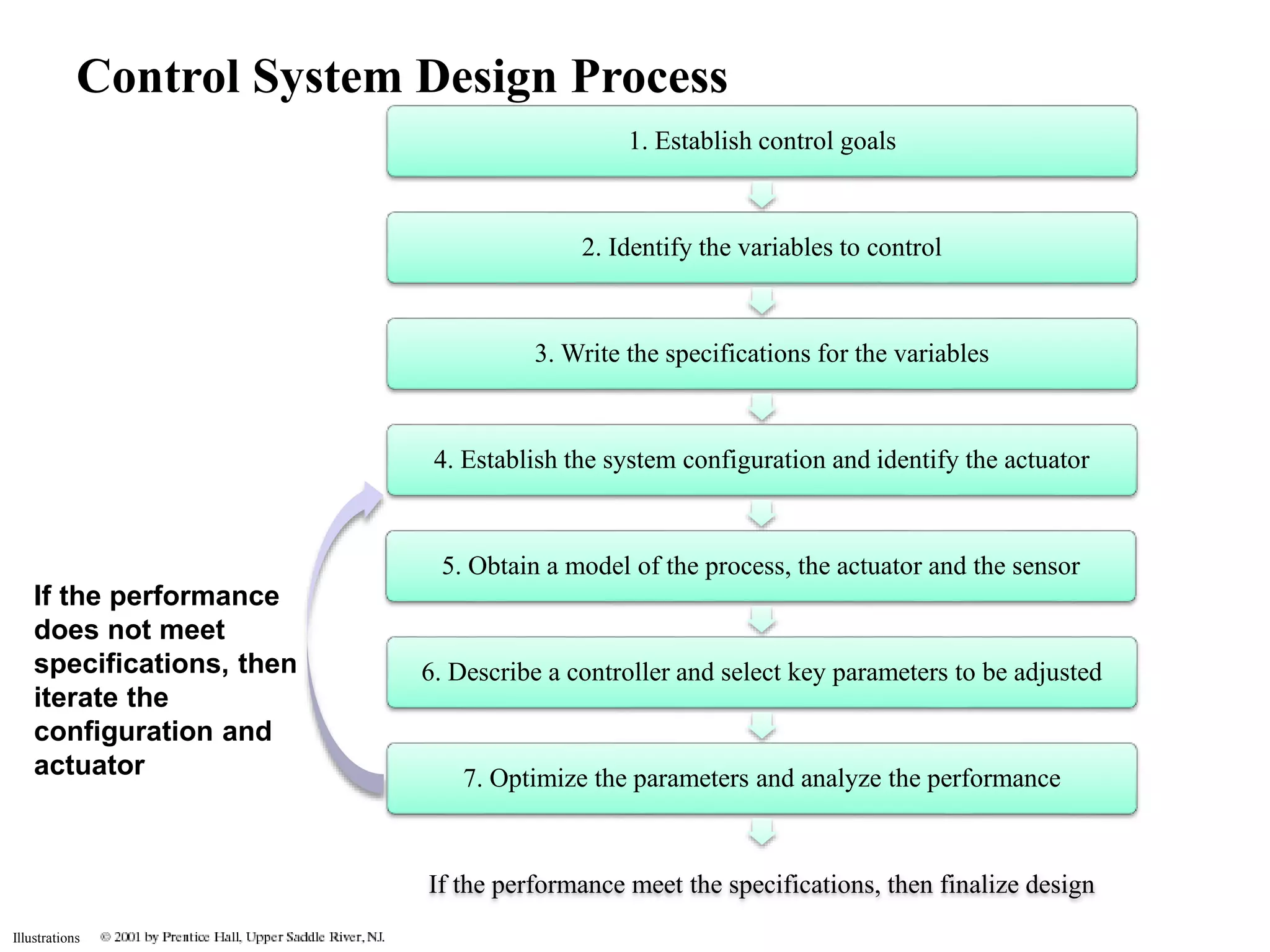
Steps involved in control system design including establishing goals and optimizing parameters.
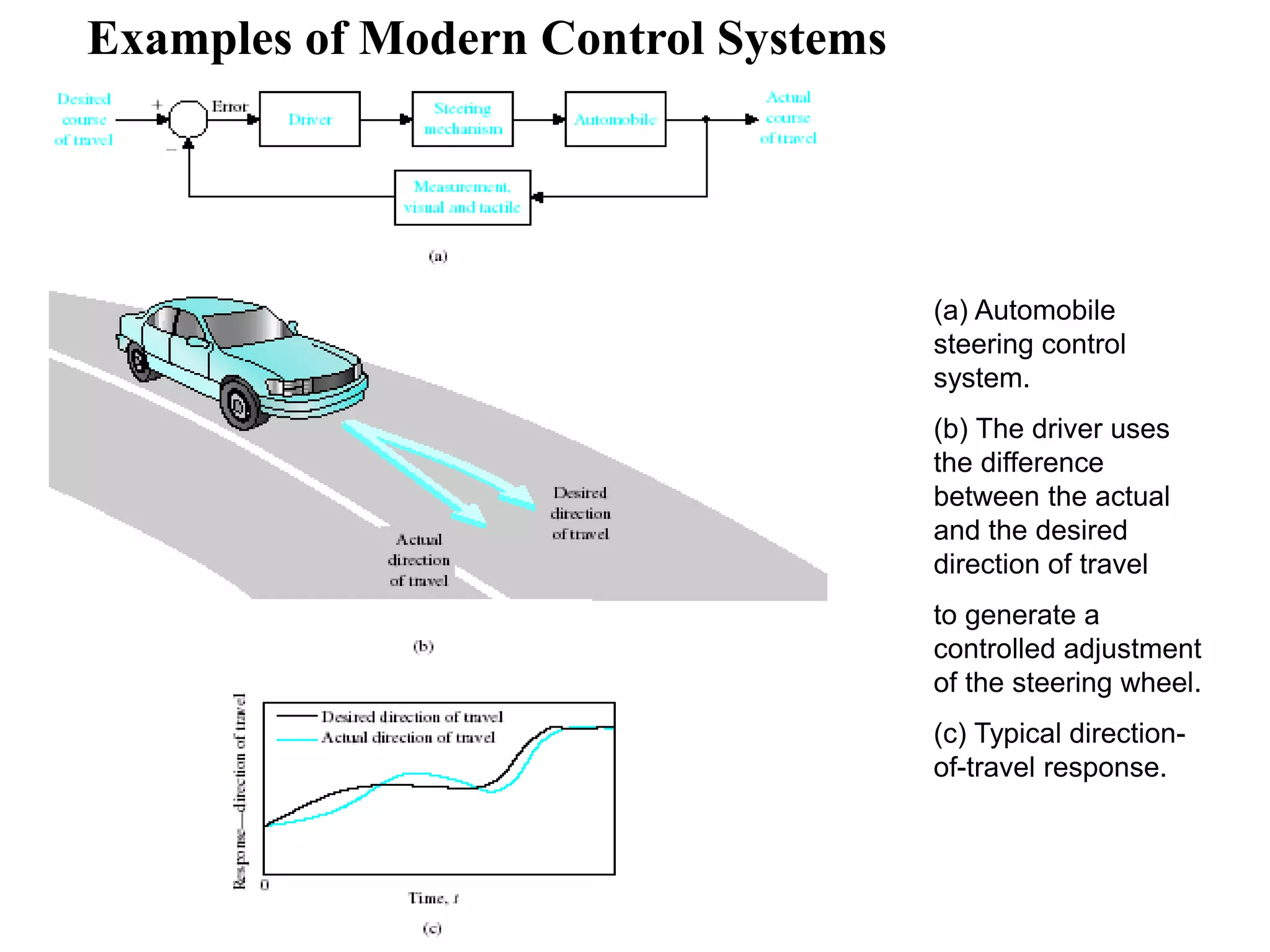
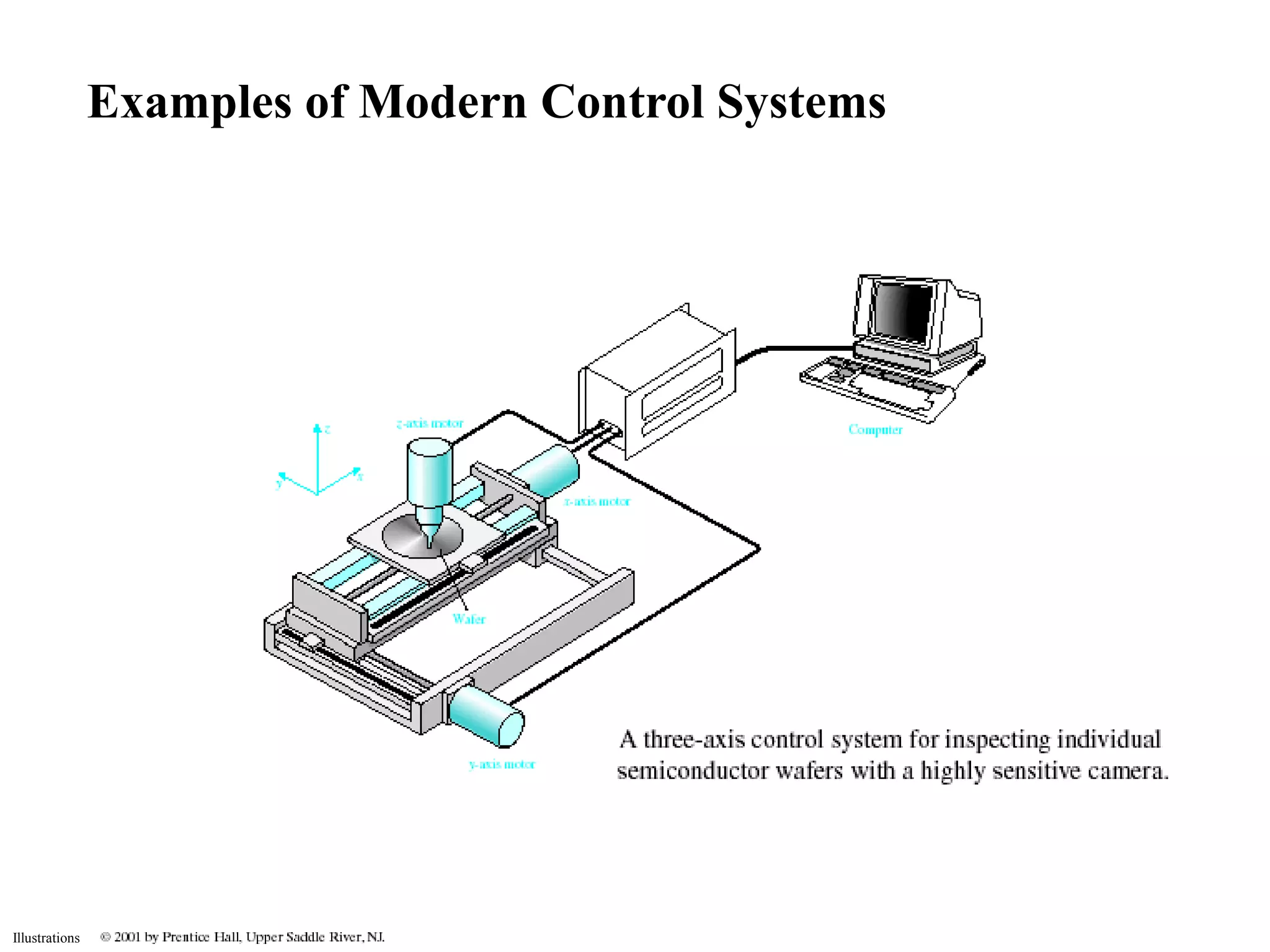
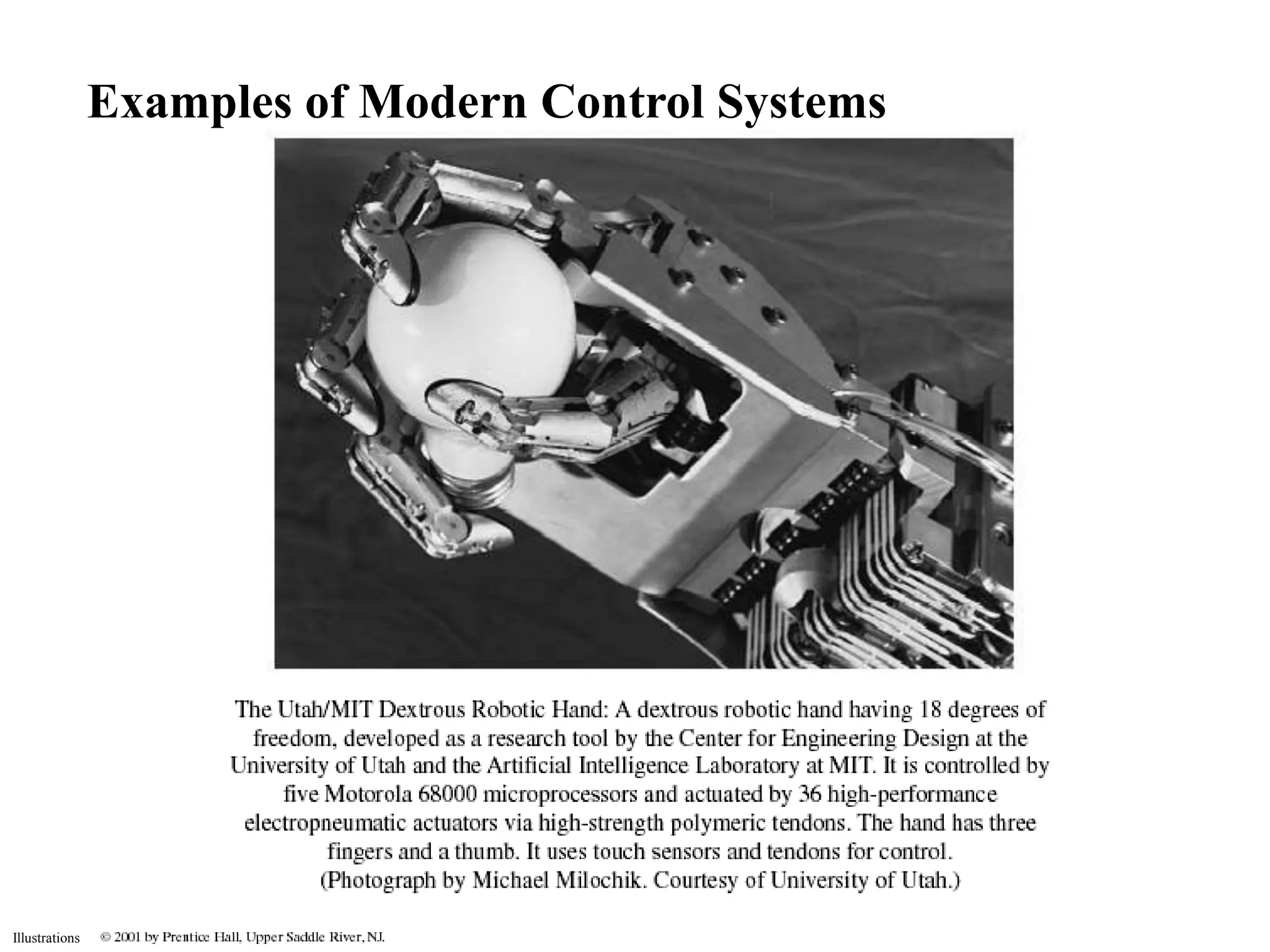
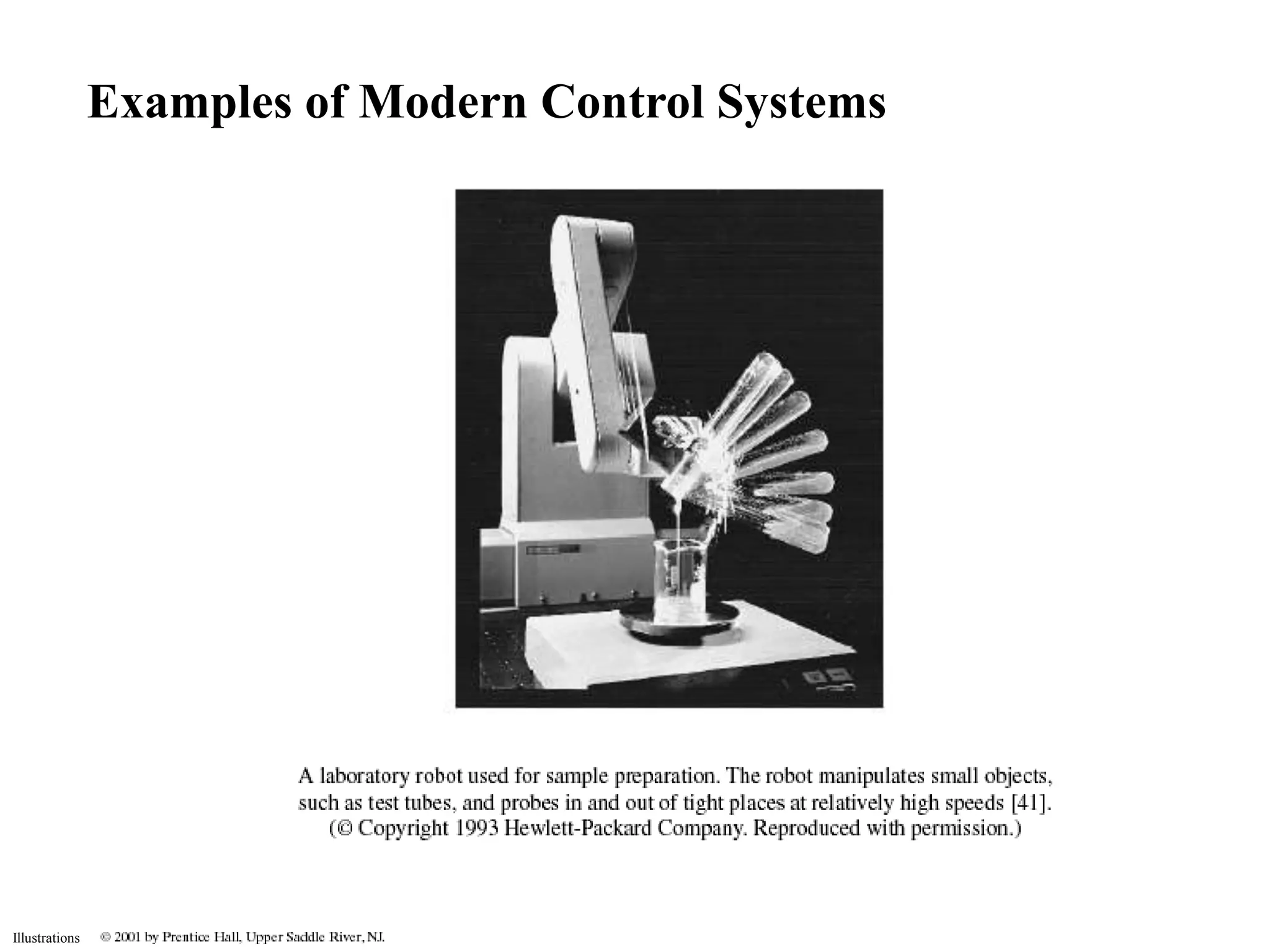
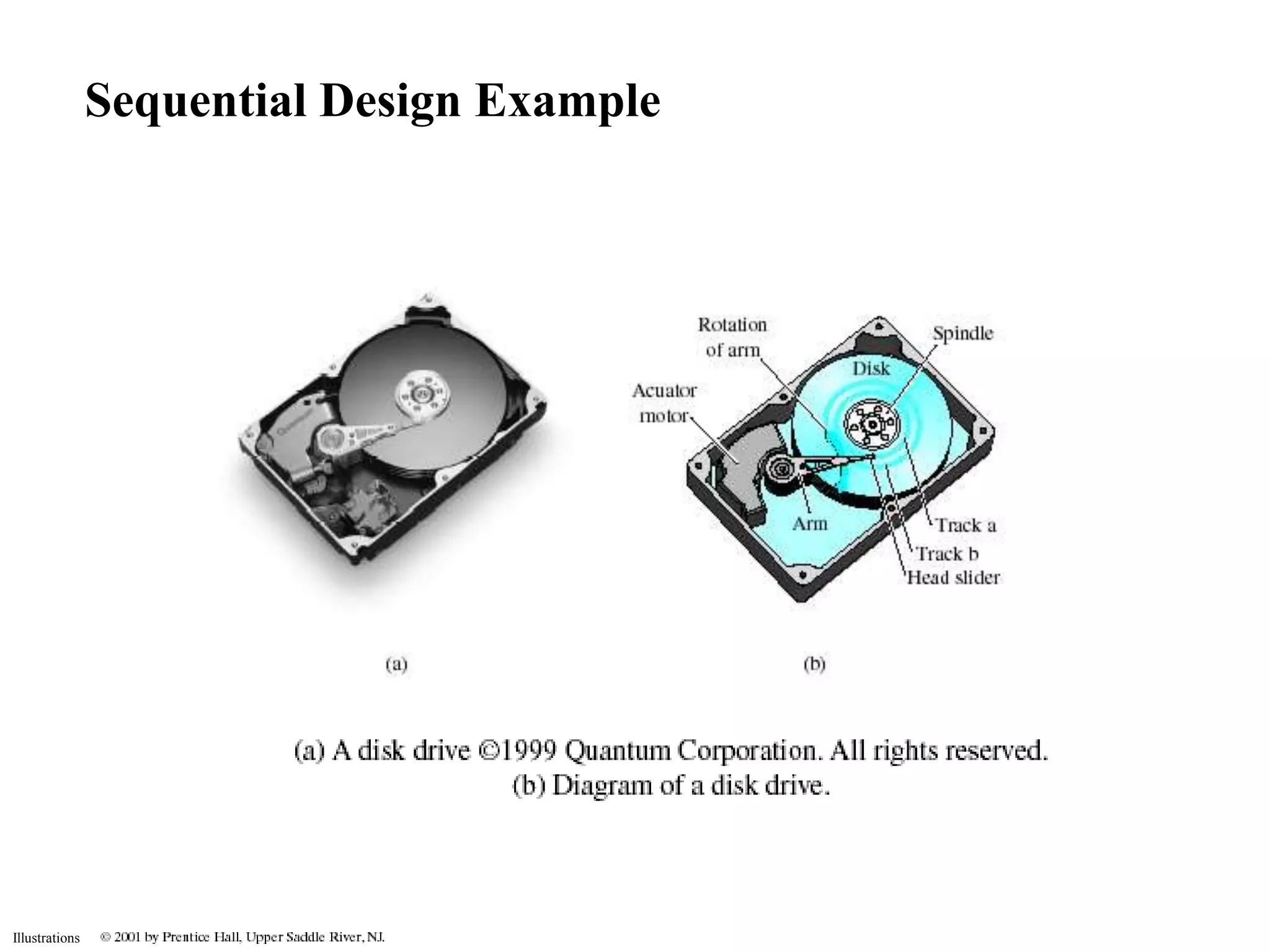
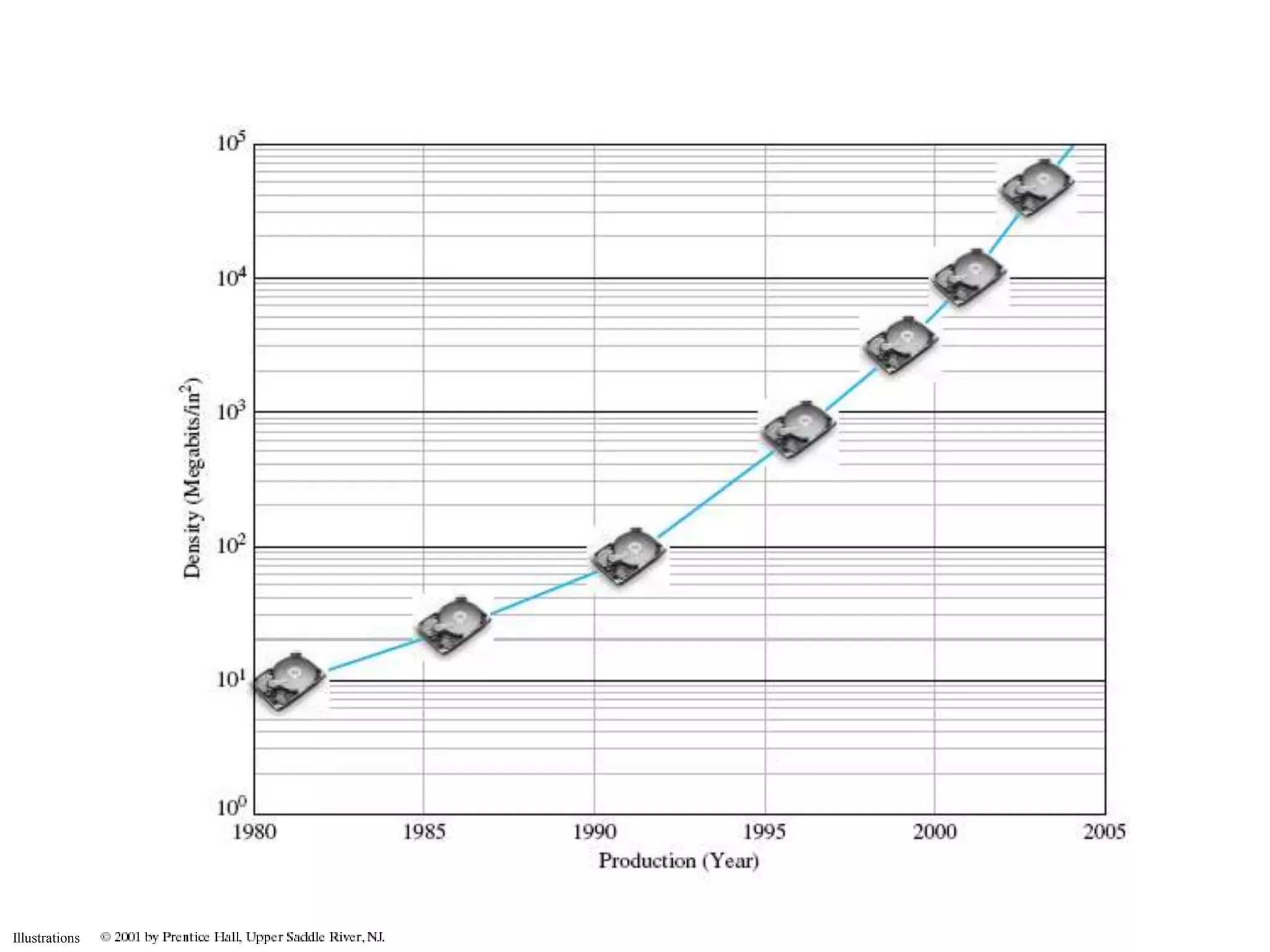
Examples of modern control systems and their applications in various fields.
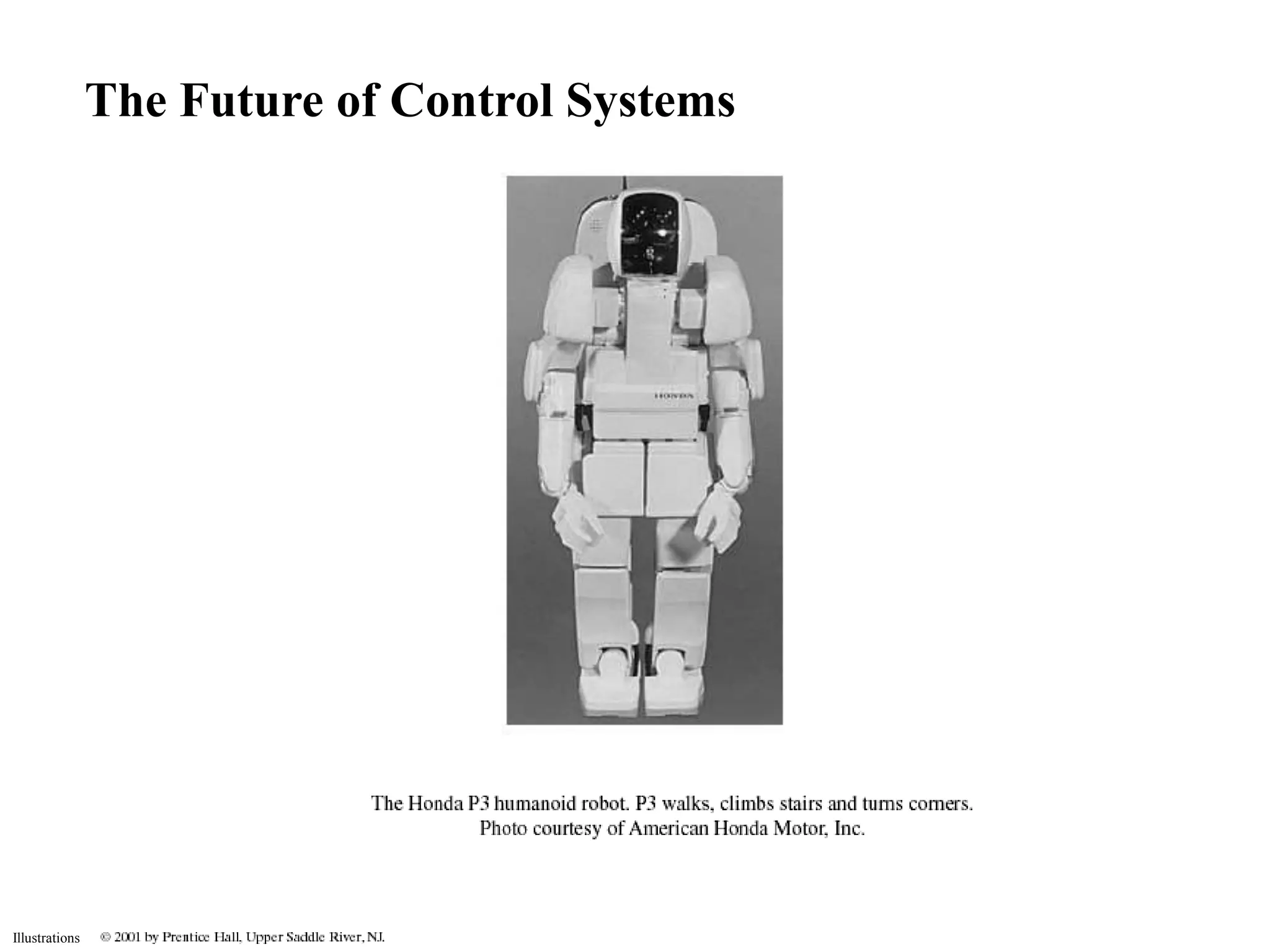
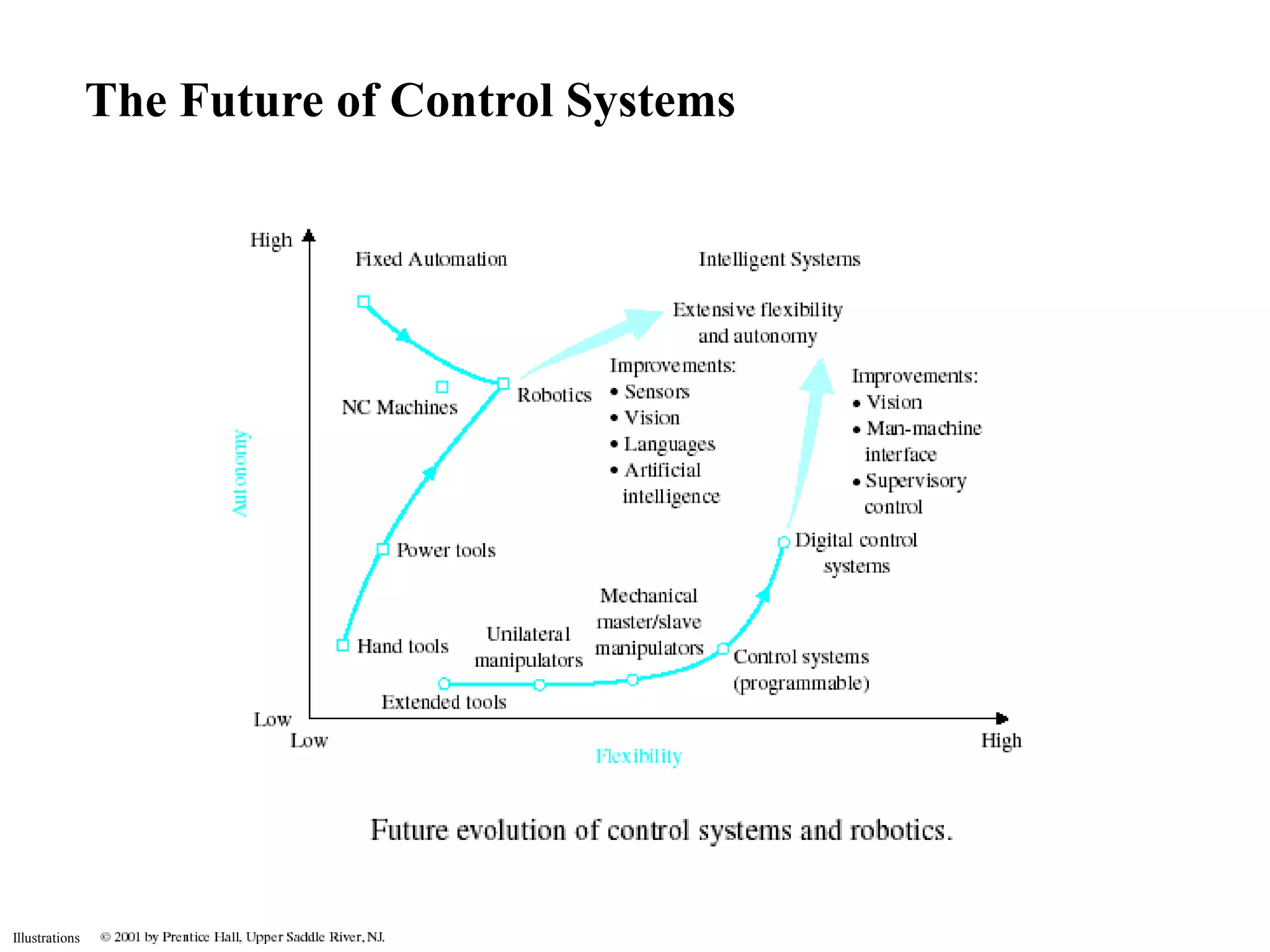
Insights into the future trends and advancements in control systems.
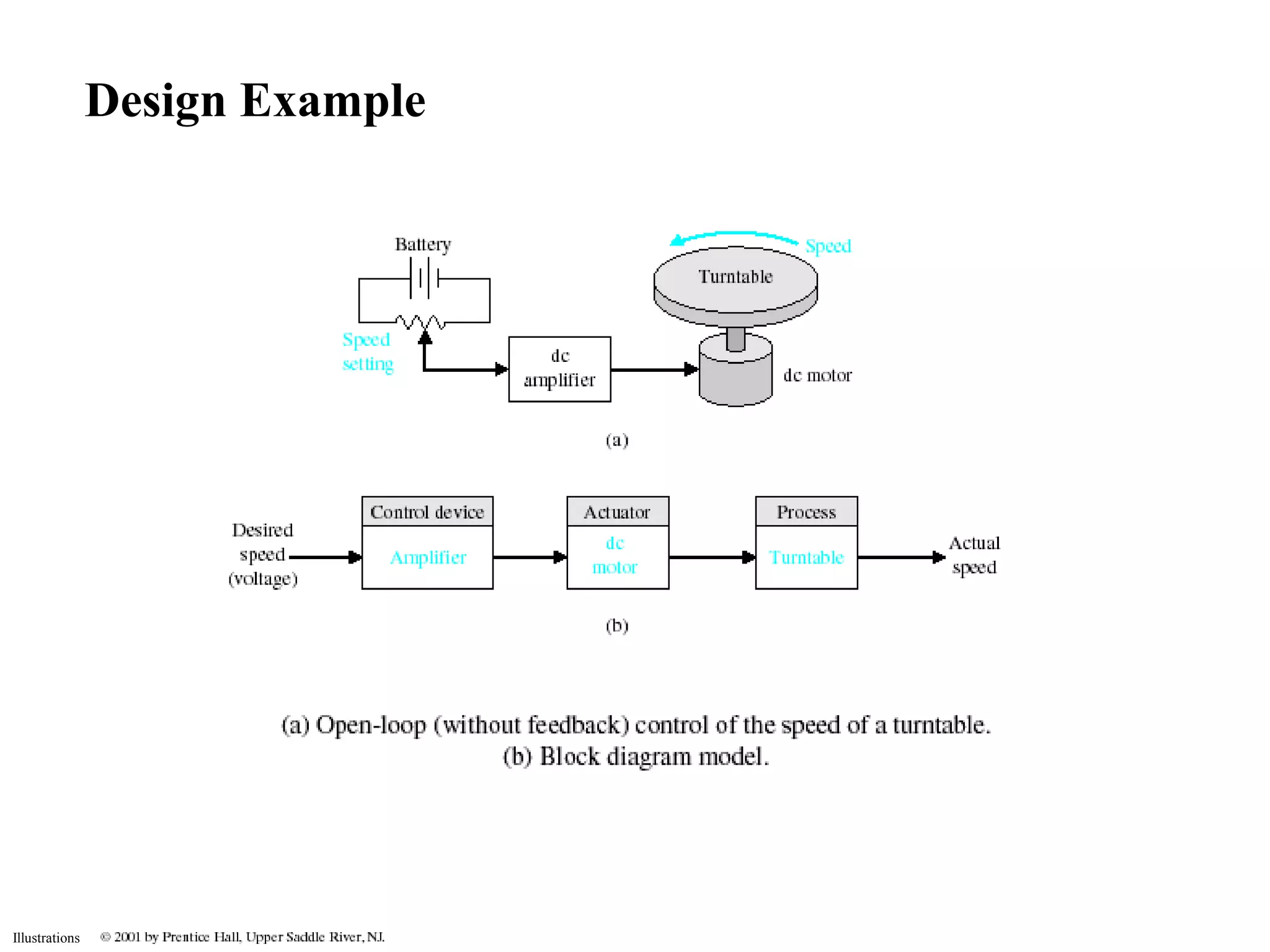
Examples of design processes in control systems with sequential steps demonstrated.
Thank you note and ending of the lecture on control systems.









































































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)











