Download to read offline
![Local features: main components
1) Detection: Identify the
interest points
2) Description: Extract vector
feature descriptor surrounding
each interest point.
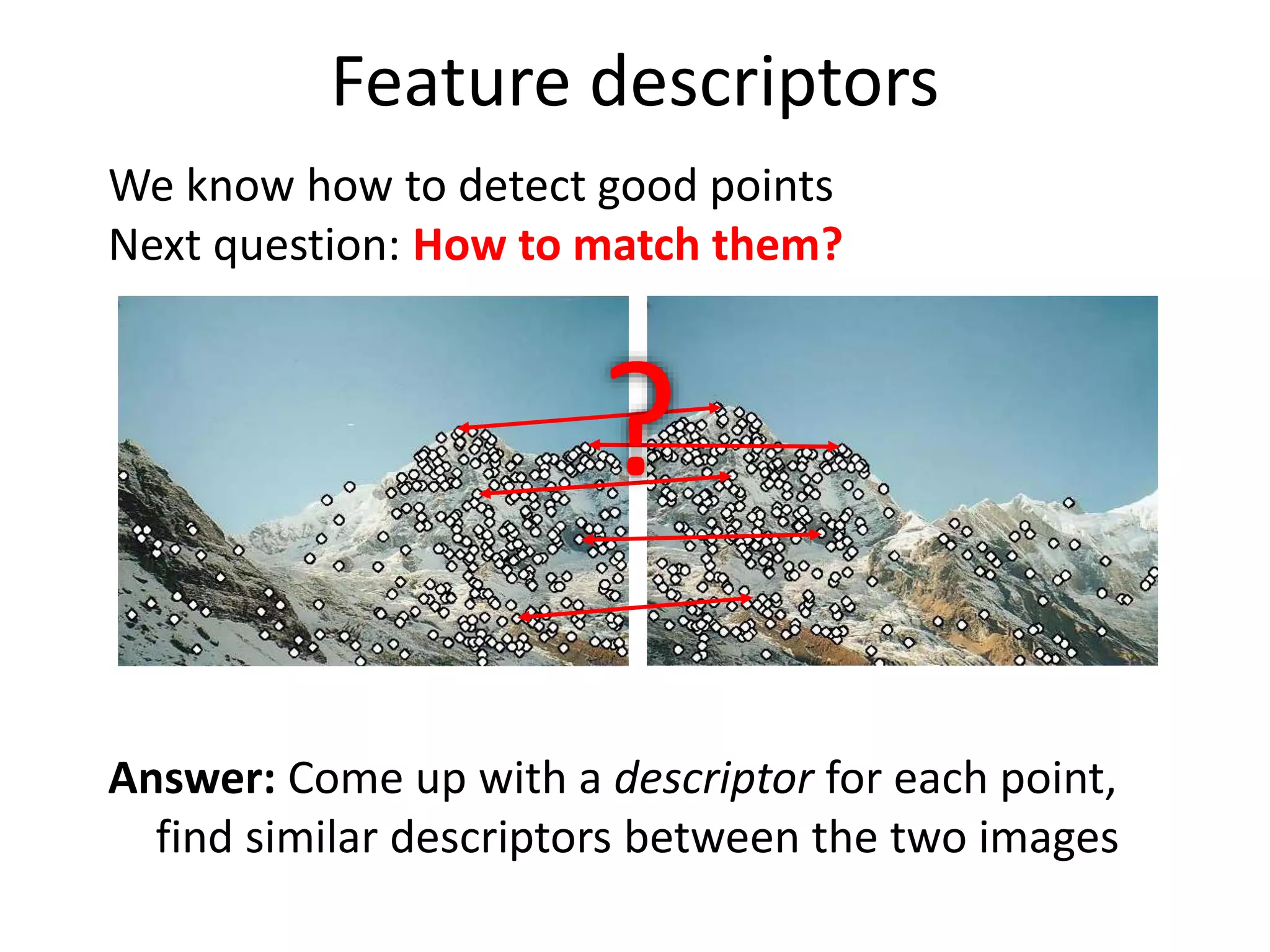
3) Matching: Determine
correspondence between
descriptors in two views
],,[ )1()1(
11 dxx x
],,[ )2()2(
12 dxx x
Kristen Grauman](https://image.slidesharecdn.com/lec05invariance-200719135053/75/Computer-Vision-invariance-3-2048.jpg)


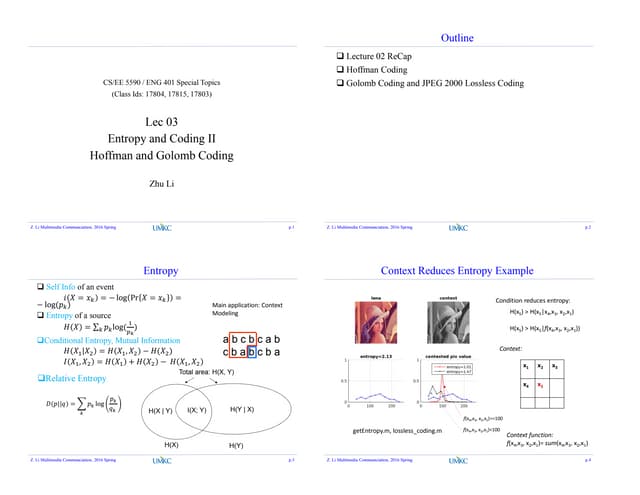
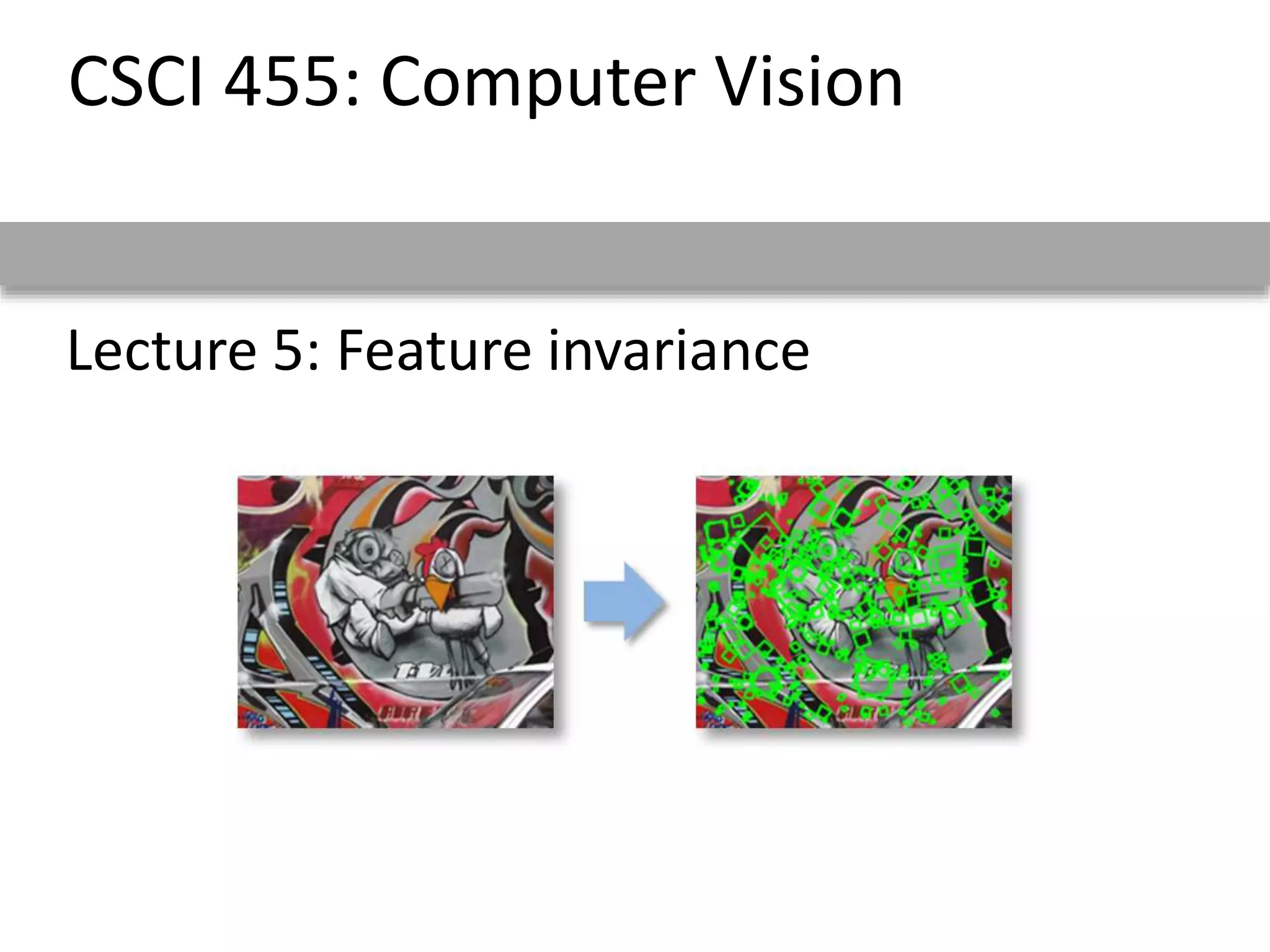
This document discusses feature invariance in computer vision. It covers several key points: 1) Local feature detection aims to identify interest points, extract feature descriptors around each point, and match descriptors between views. 2) Features should be invariant to photometric transformations like intensity changes and equivariant to geometric transformations like rotation and scaling. 3) The Harris corner detector is partially invariant to affine intensity changes and equivariant to translation and rotation but not scaling. 4) Scale-space feature detection uses the Laplacian of Gaussian (LoG) or Difference of Gaussians (DoG) to find maxima/minima in position and scale for scale invariance.
Introduction to Feature Invariance. Reading from Szeliski, highlighting foundational elements.
Overview of detecting interest points, extracting descriptors, and matching between views.
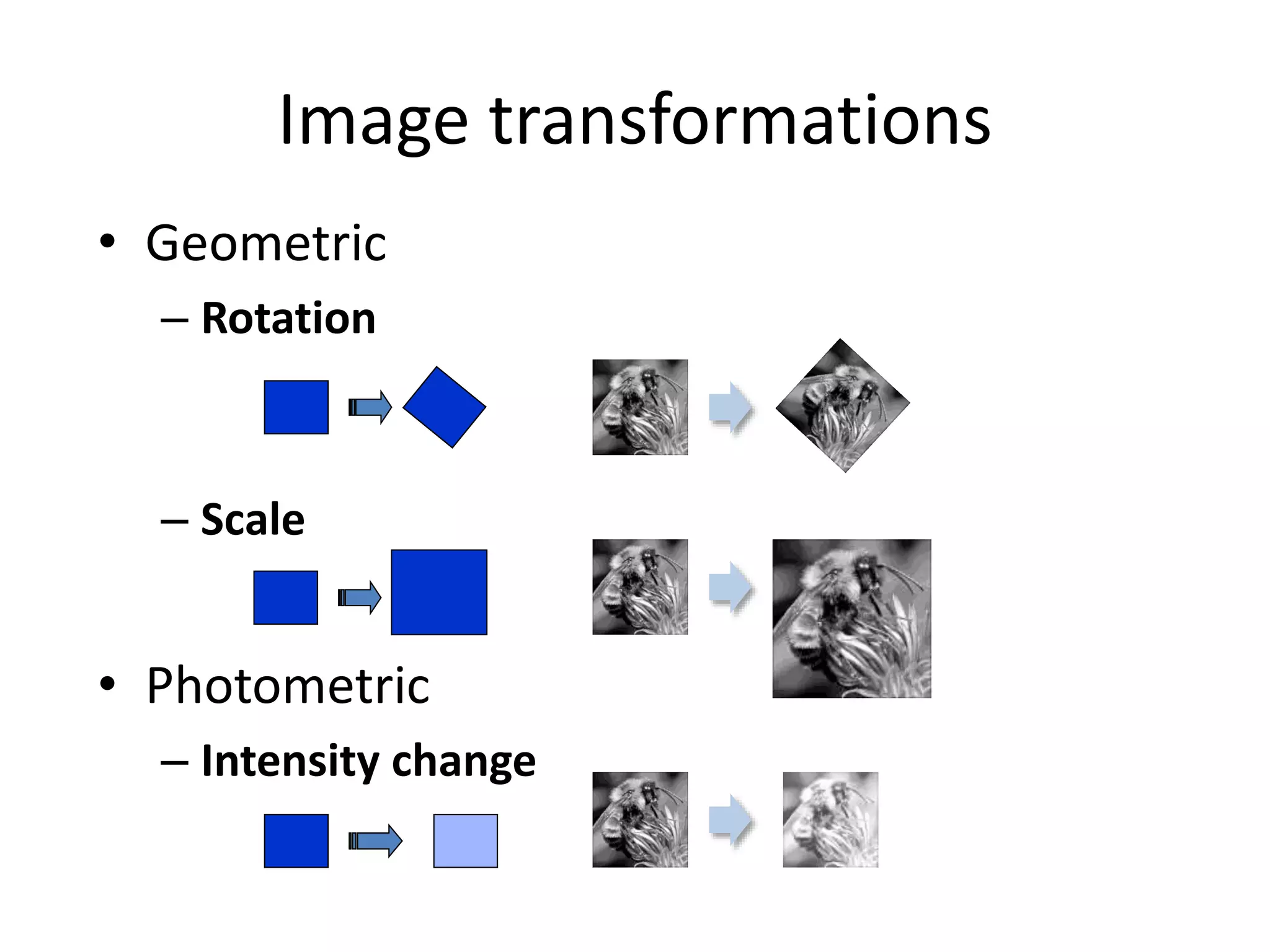
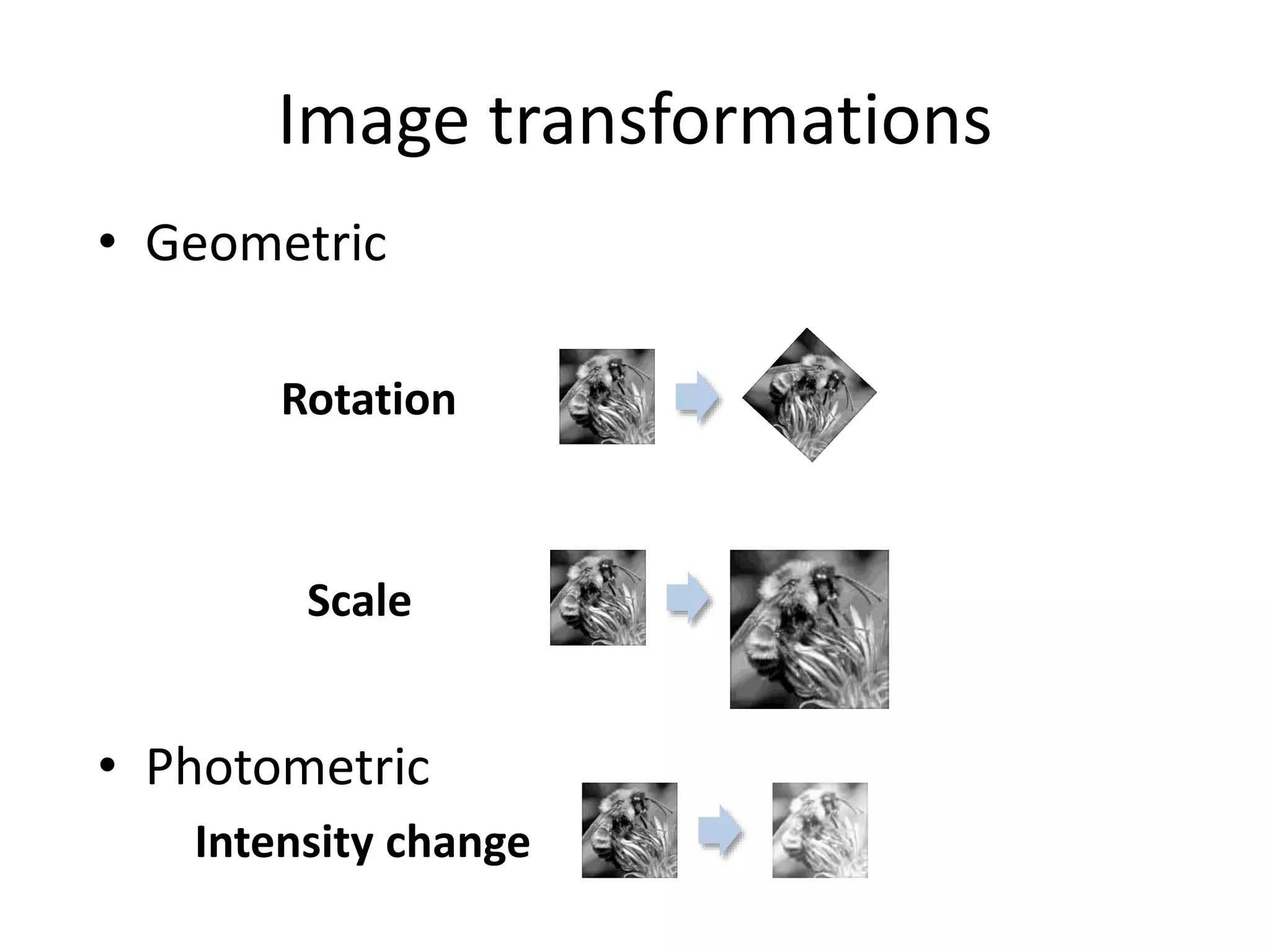
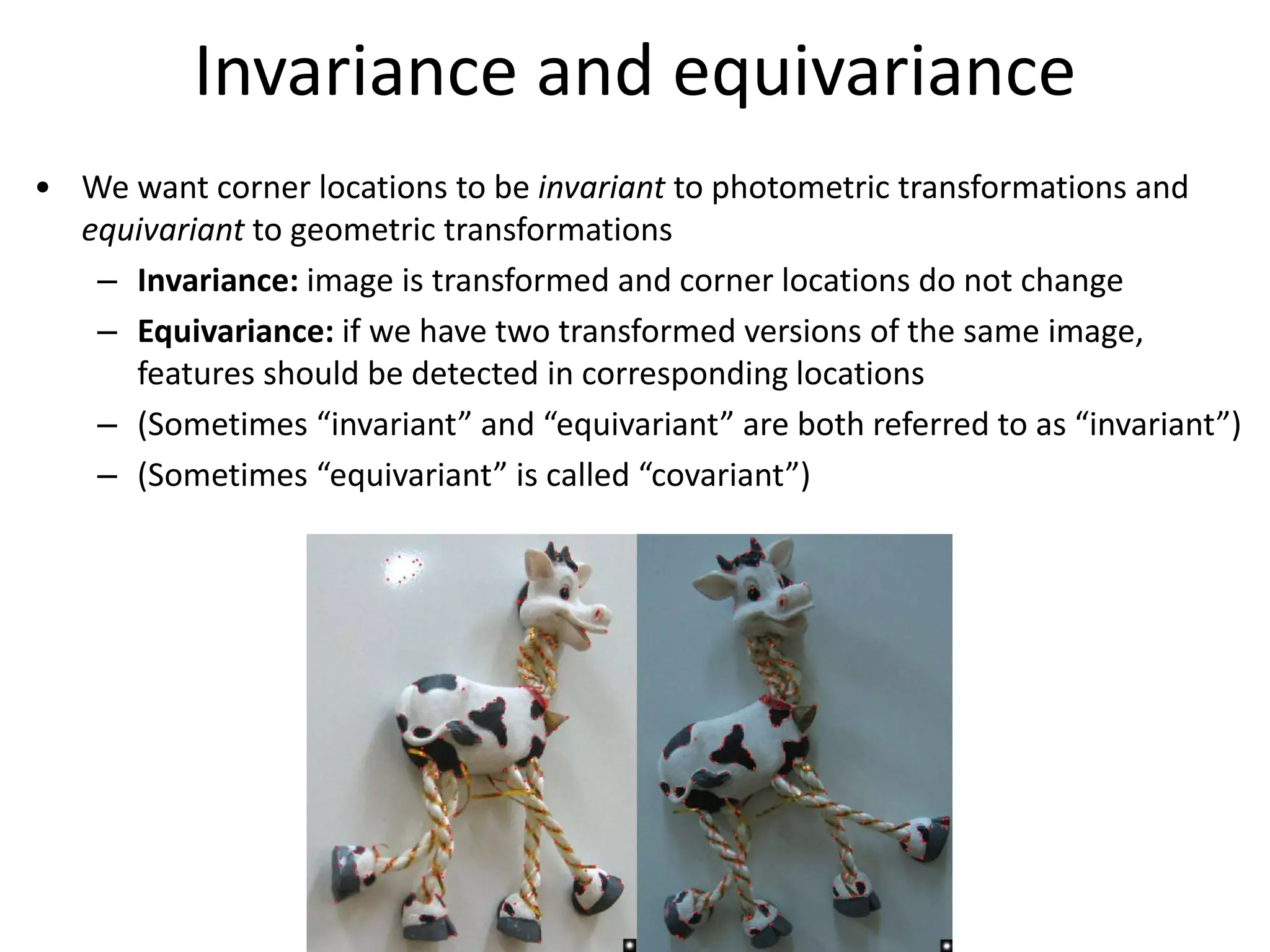
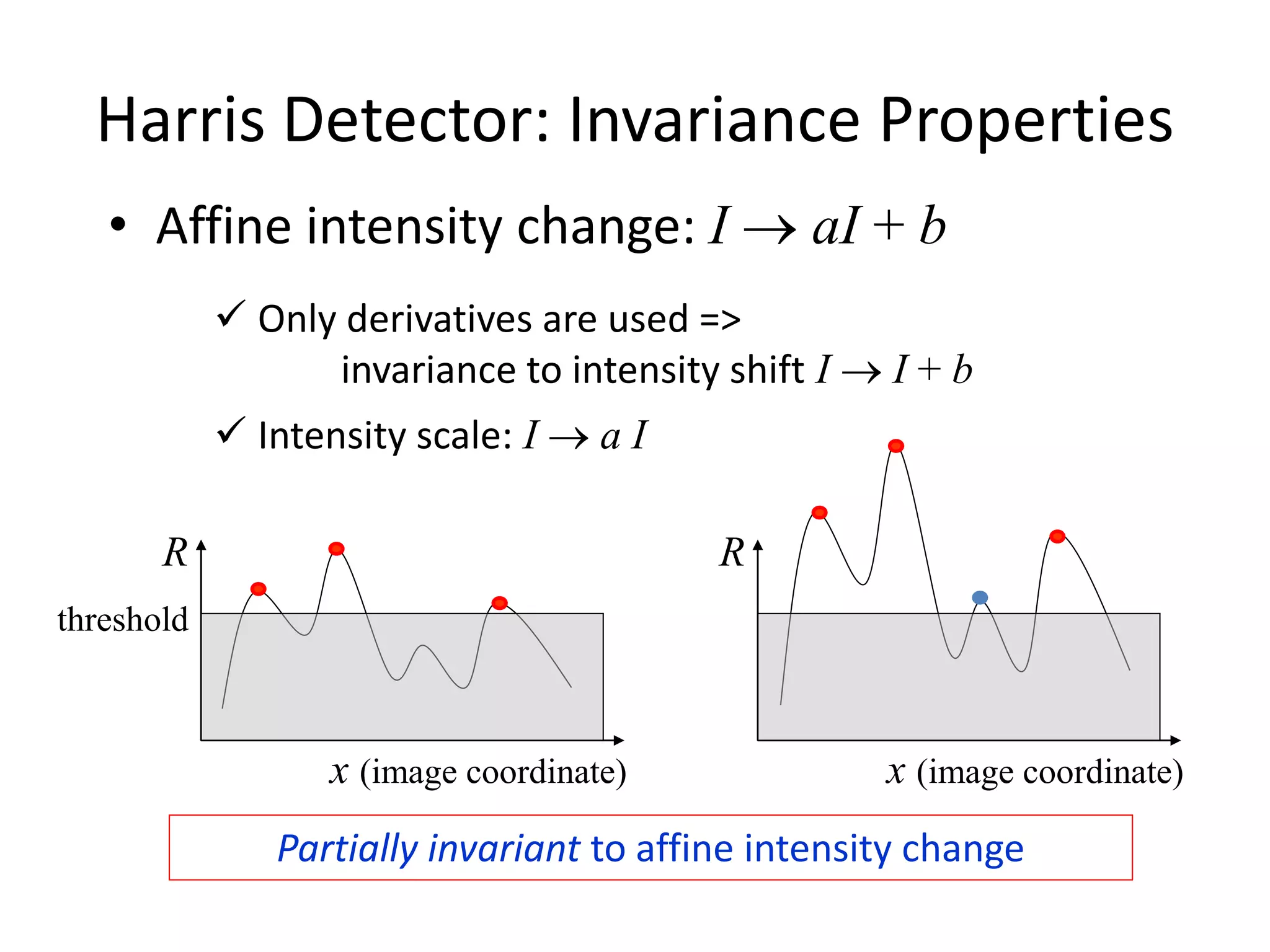
Introduction to geometric (rotation, scale) and photometric (intensity change) transformations.
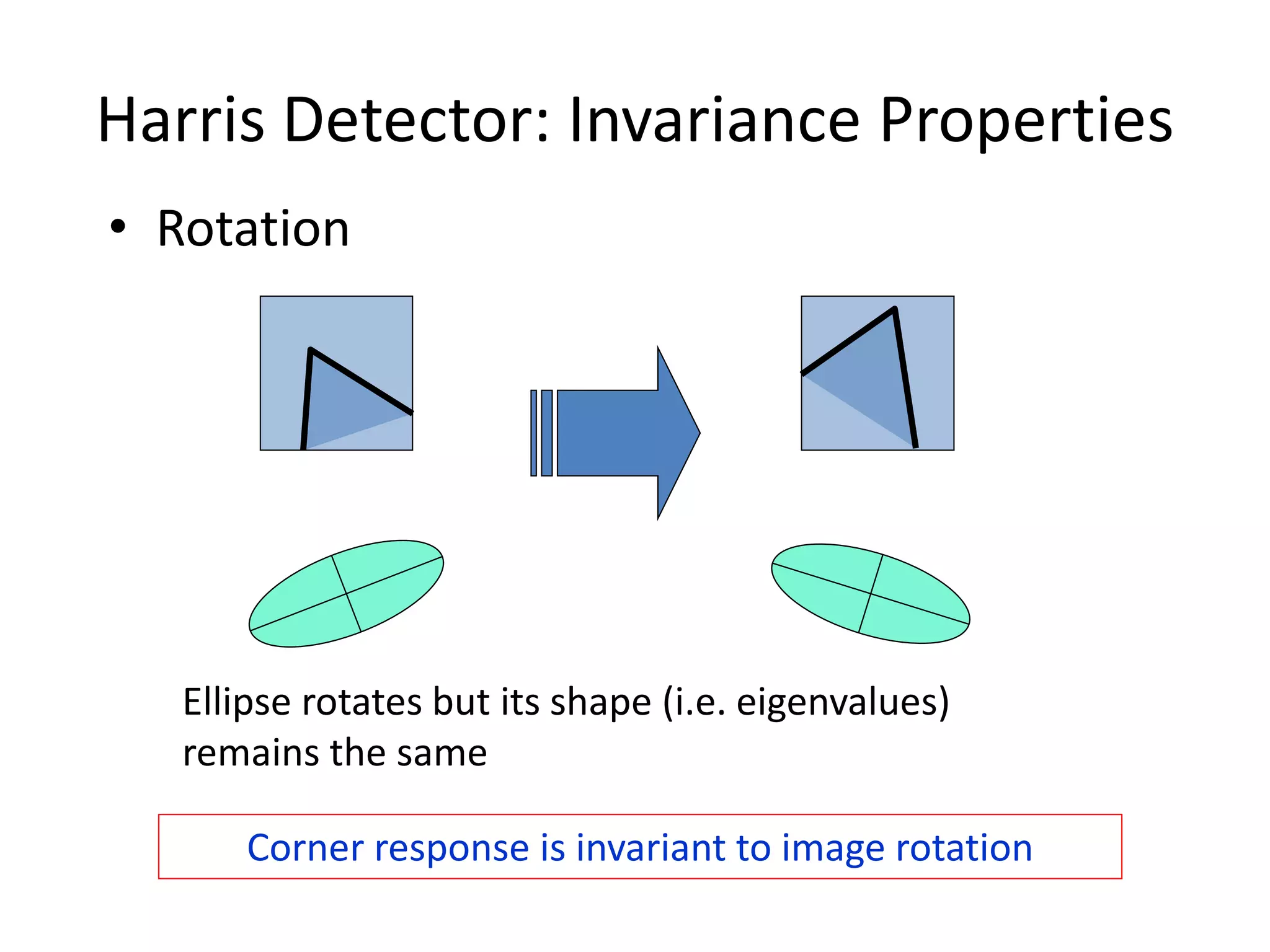
Explains invariance vs equivariance concerning corner location under transformations.
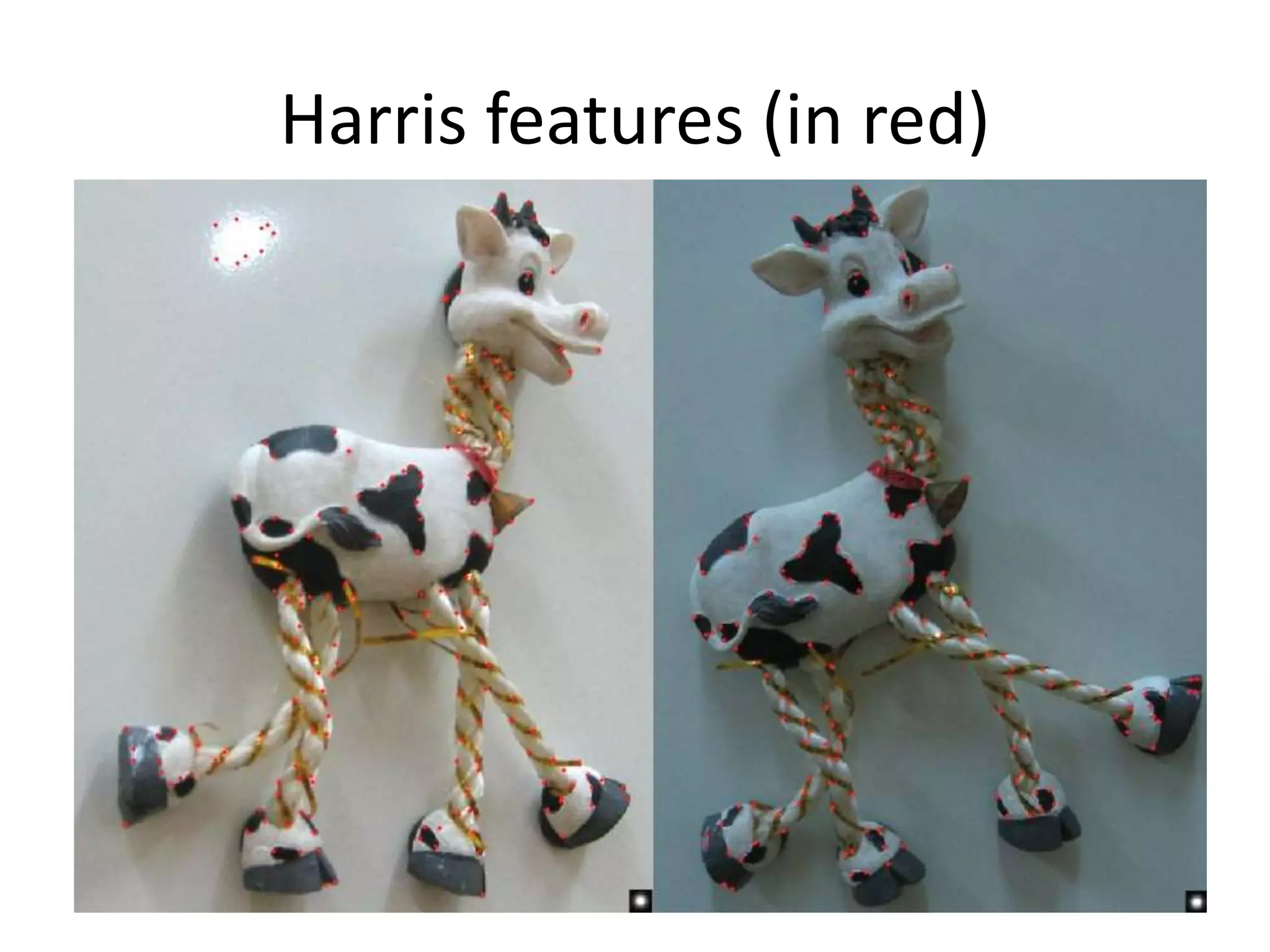
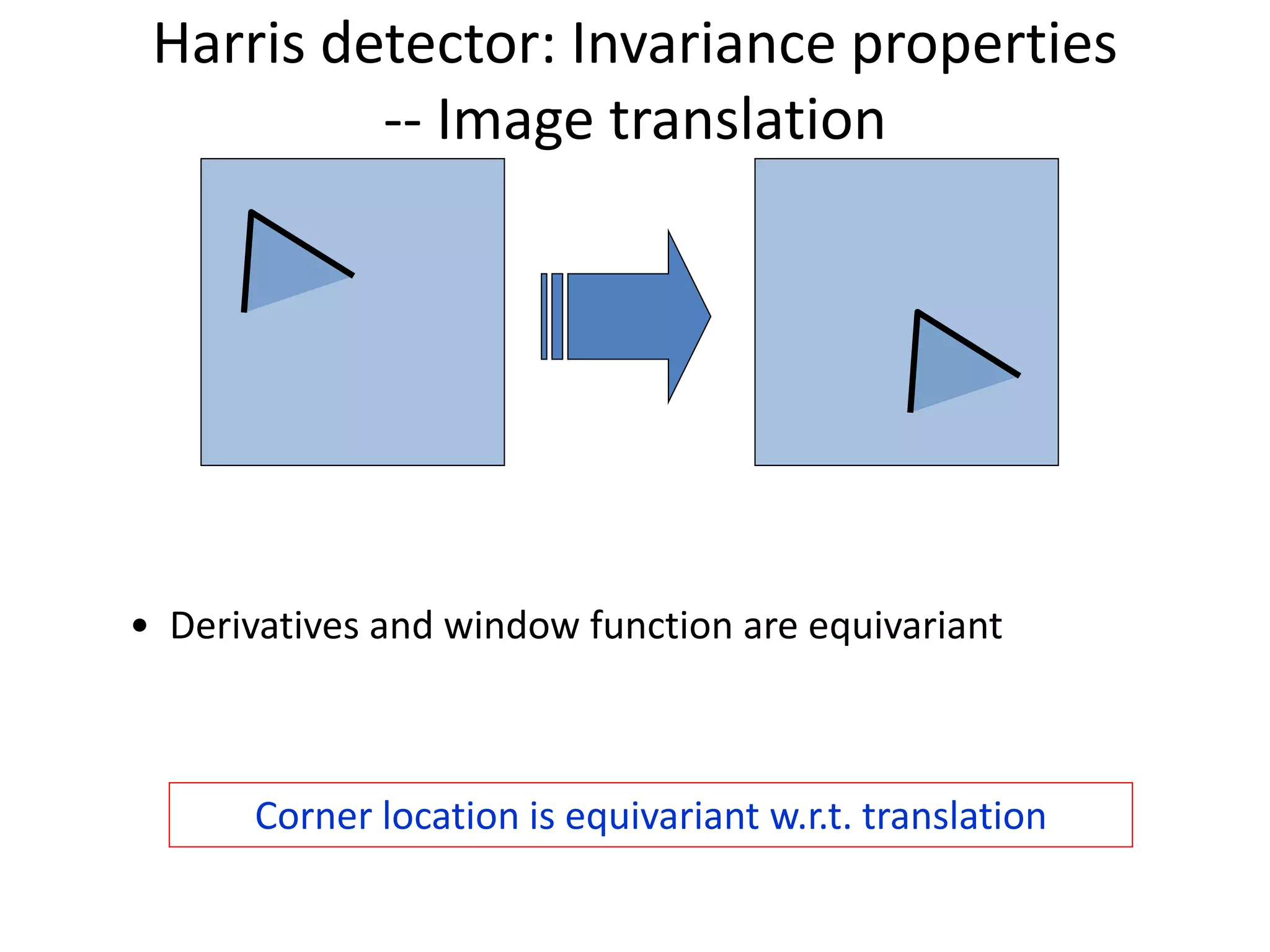
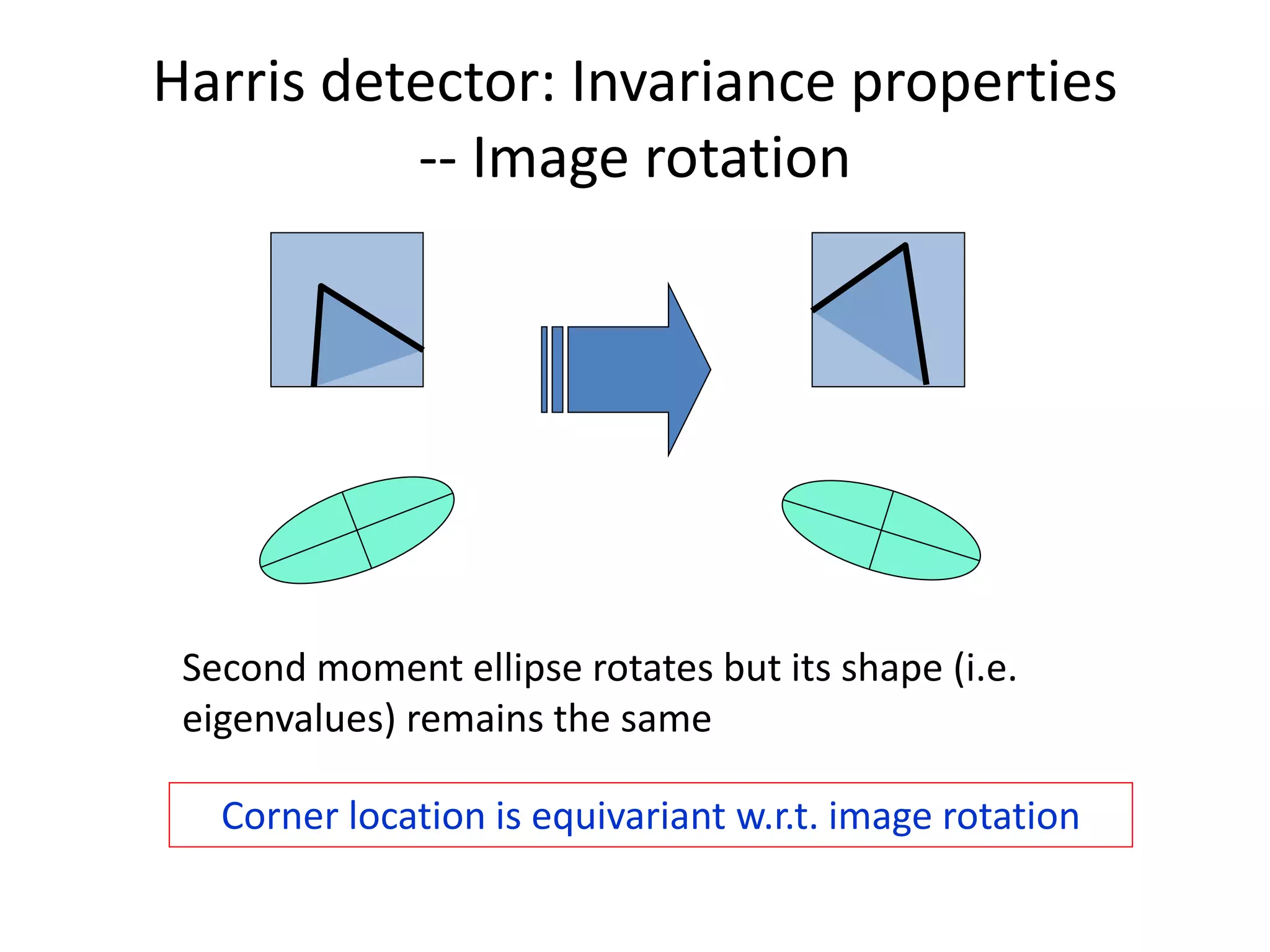
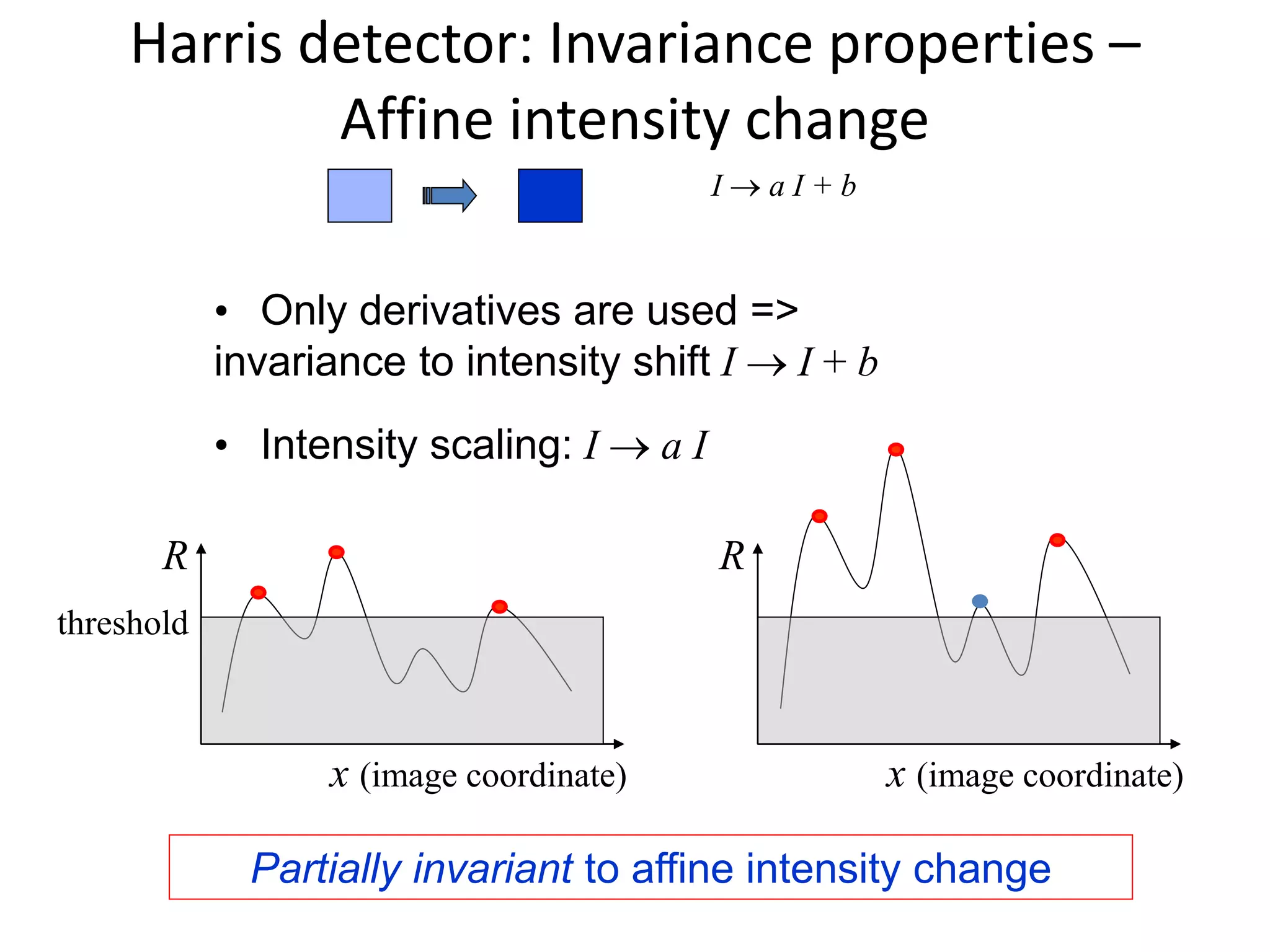
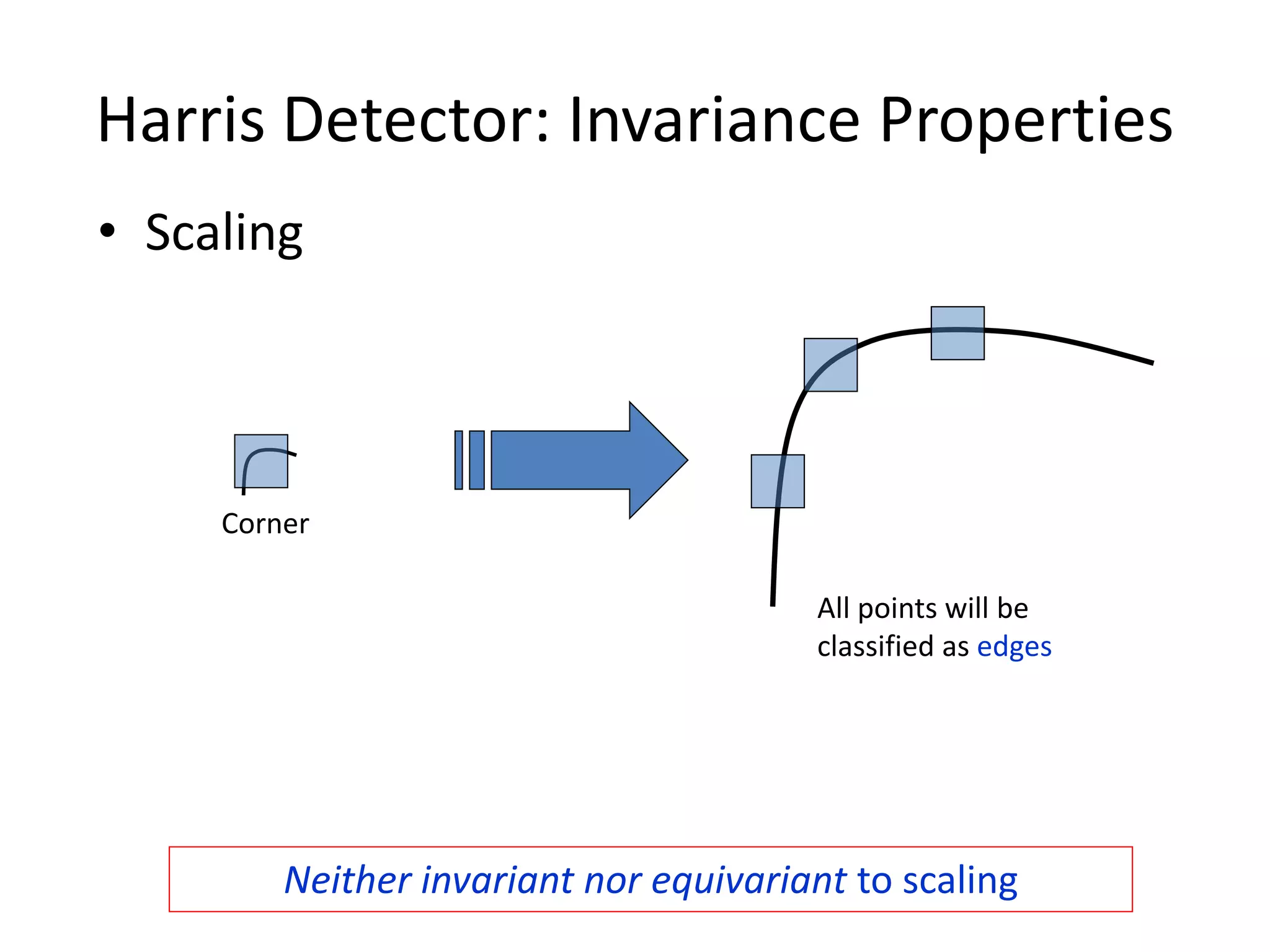
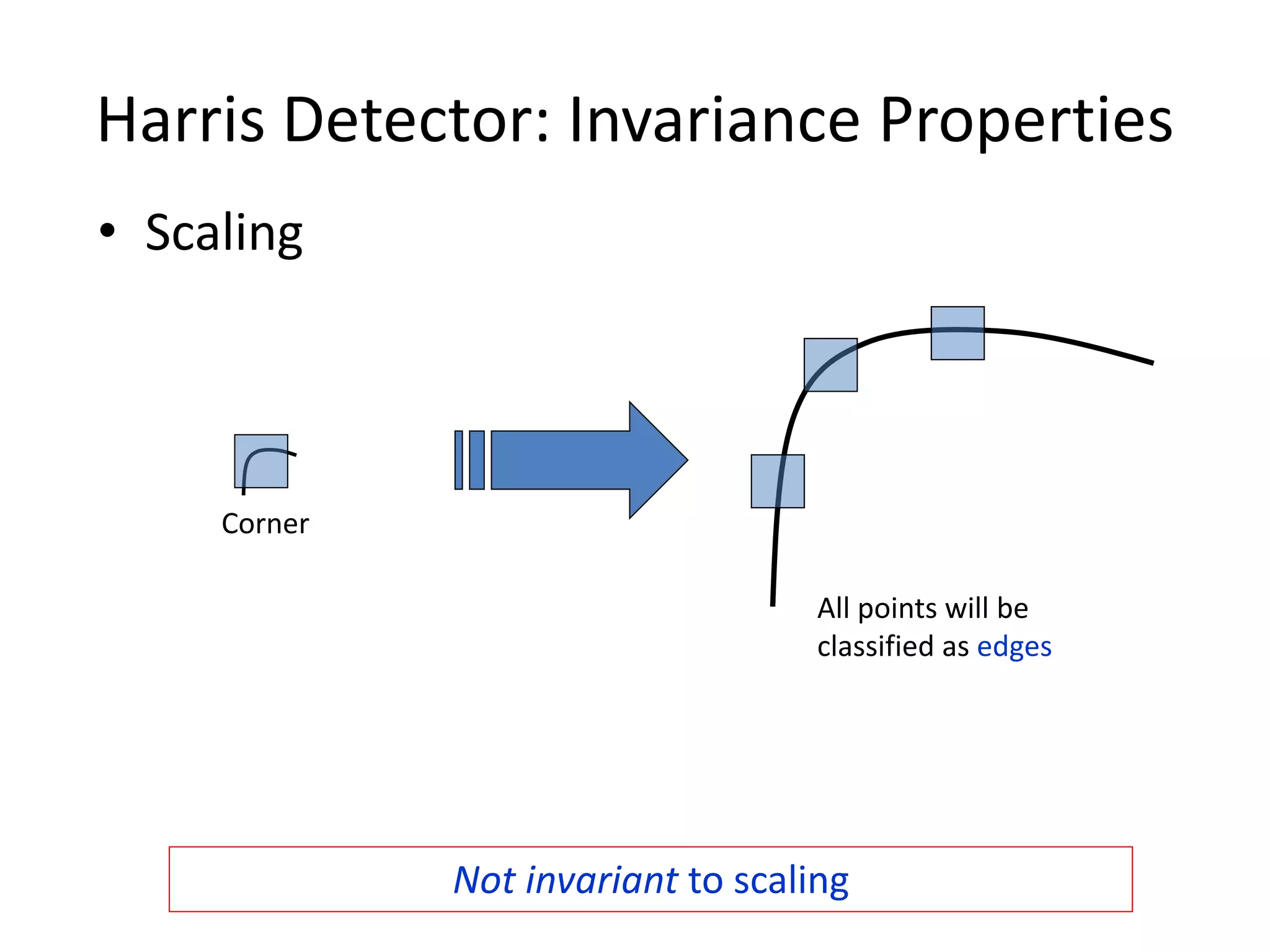
Analysis of Harris detector's behavior under translation, rotation, and intensity changes. Discusses scaling properties and notes that the Harris detector is not invariant to scaling.
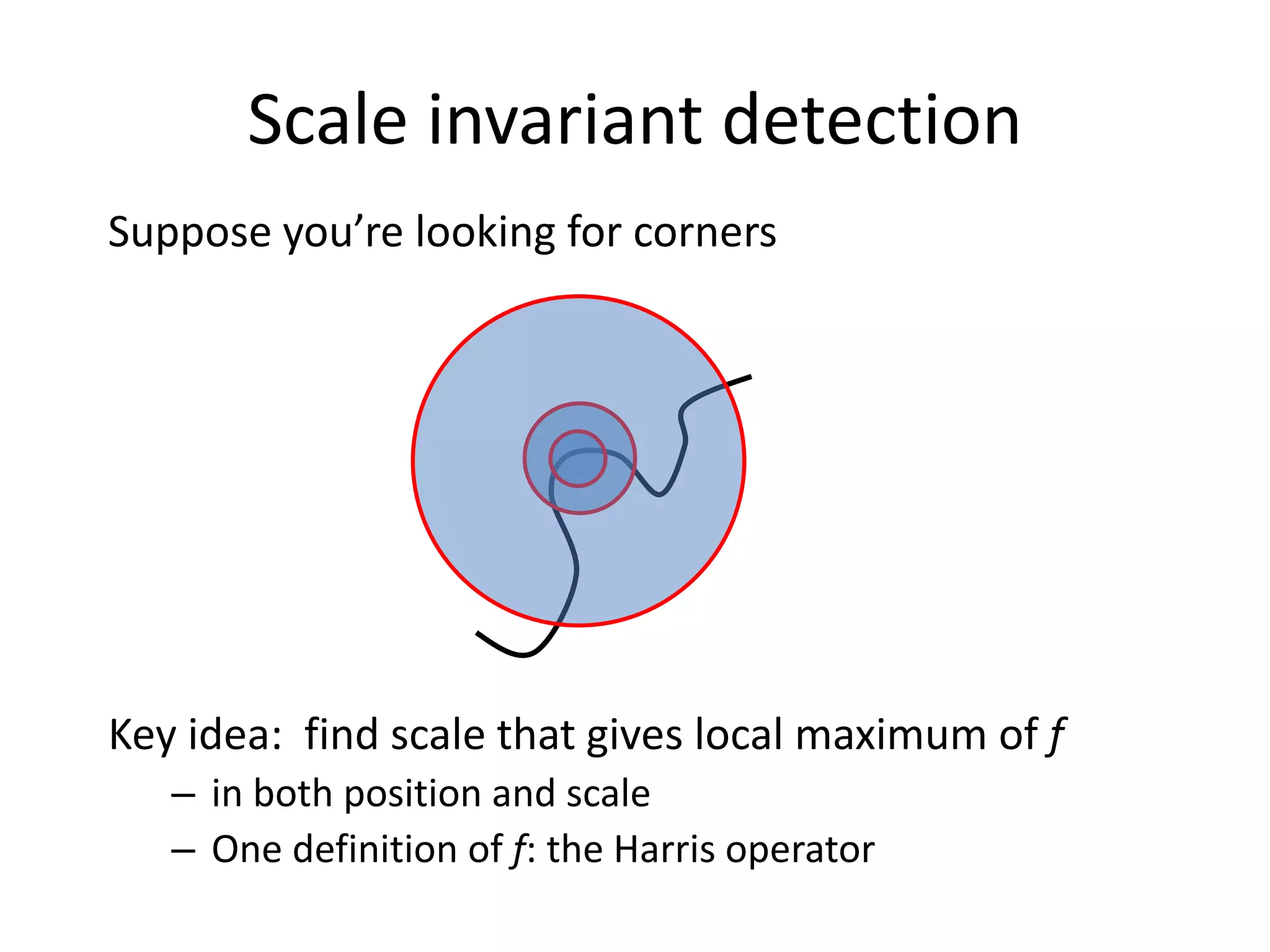
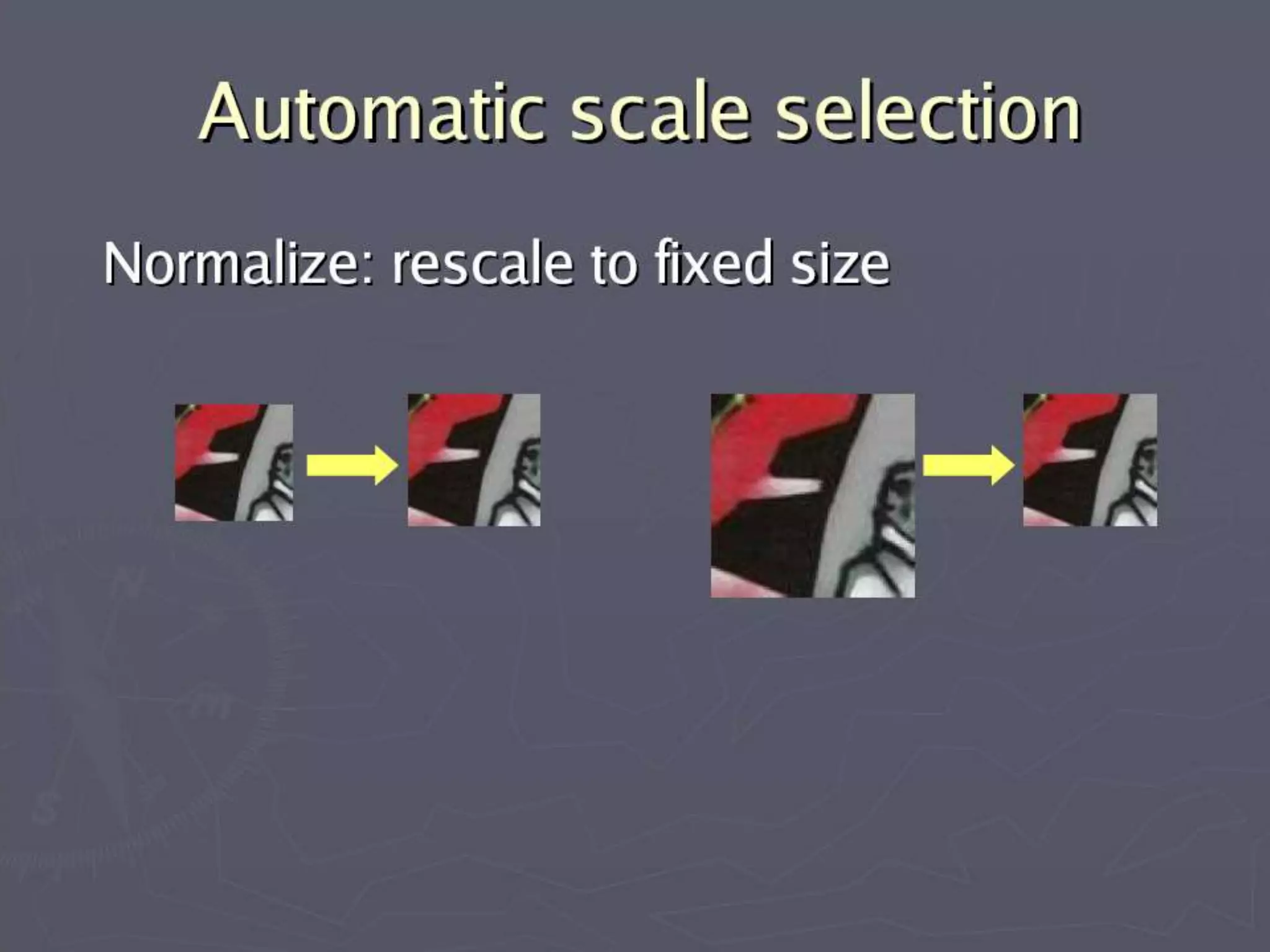
Introduction to scaling in feature detection with Harris operator.
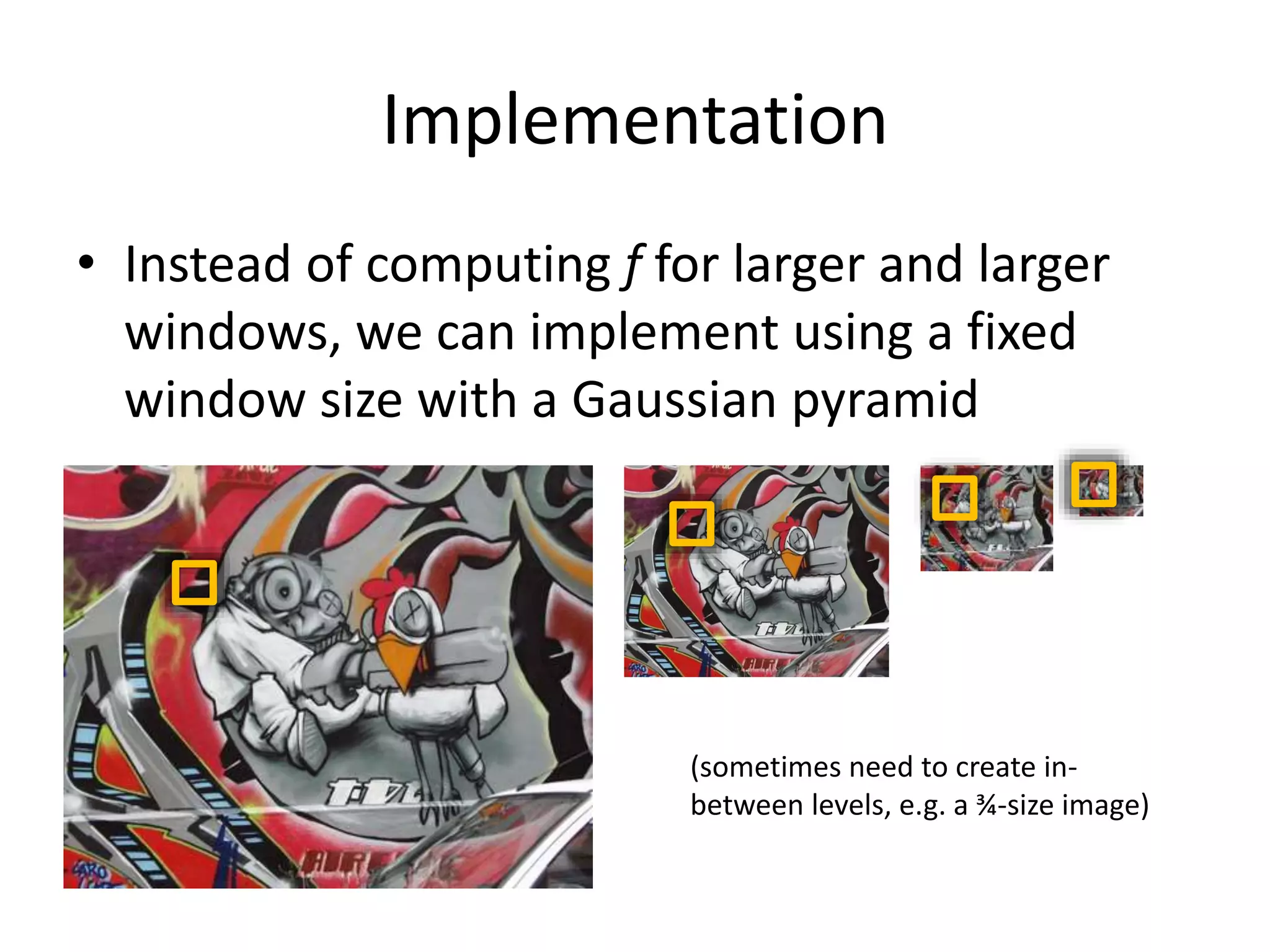
Implementation strategy using Gaussian pyramid for efficiency.
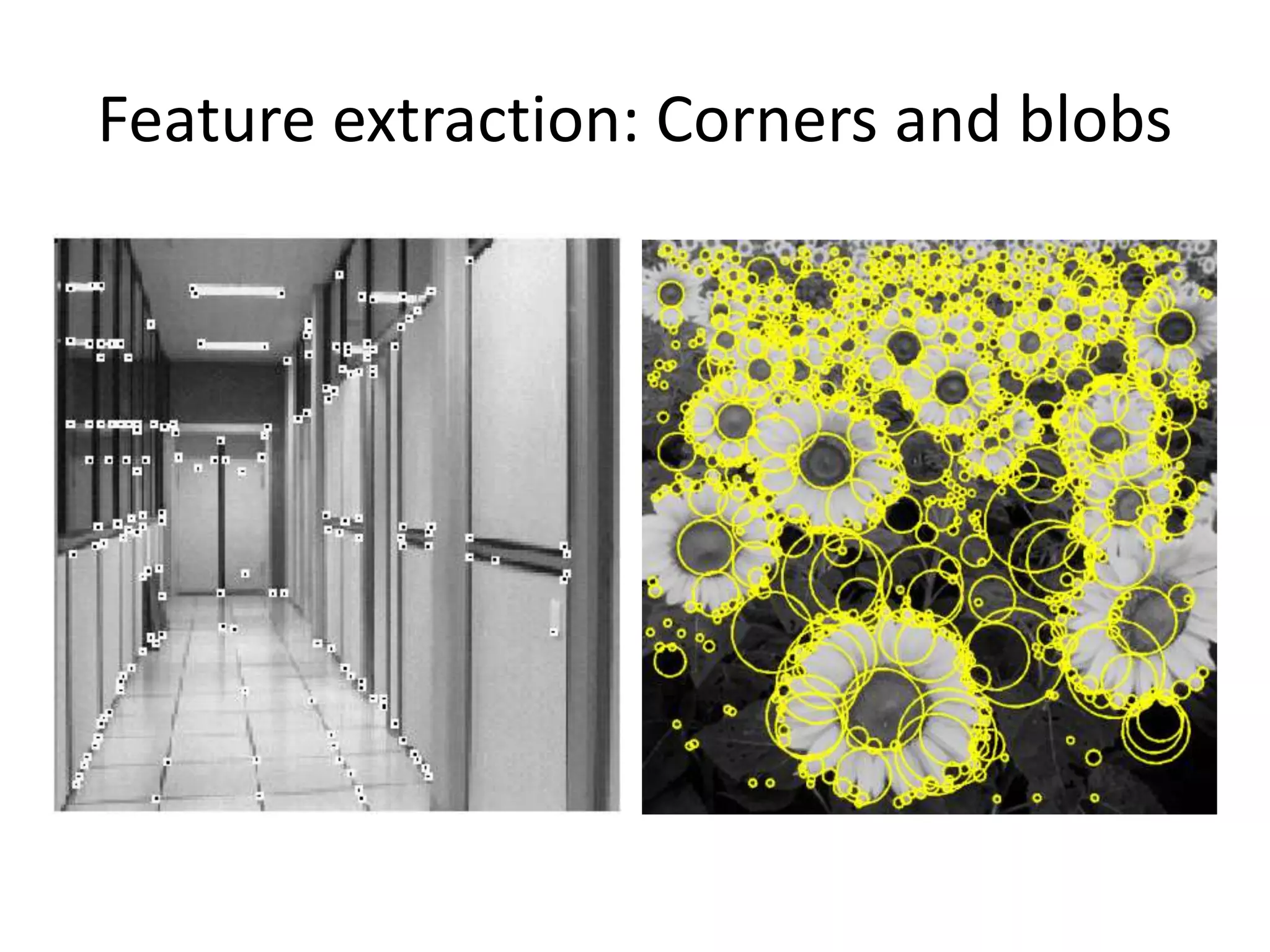
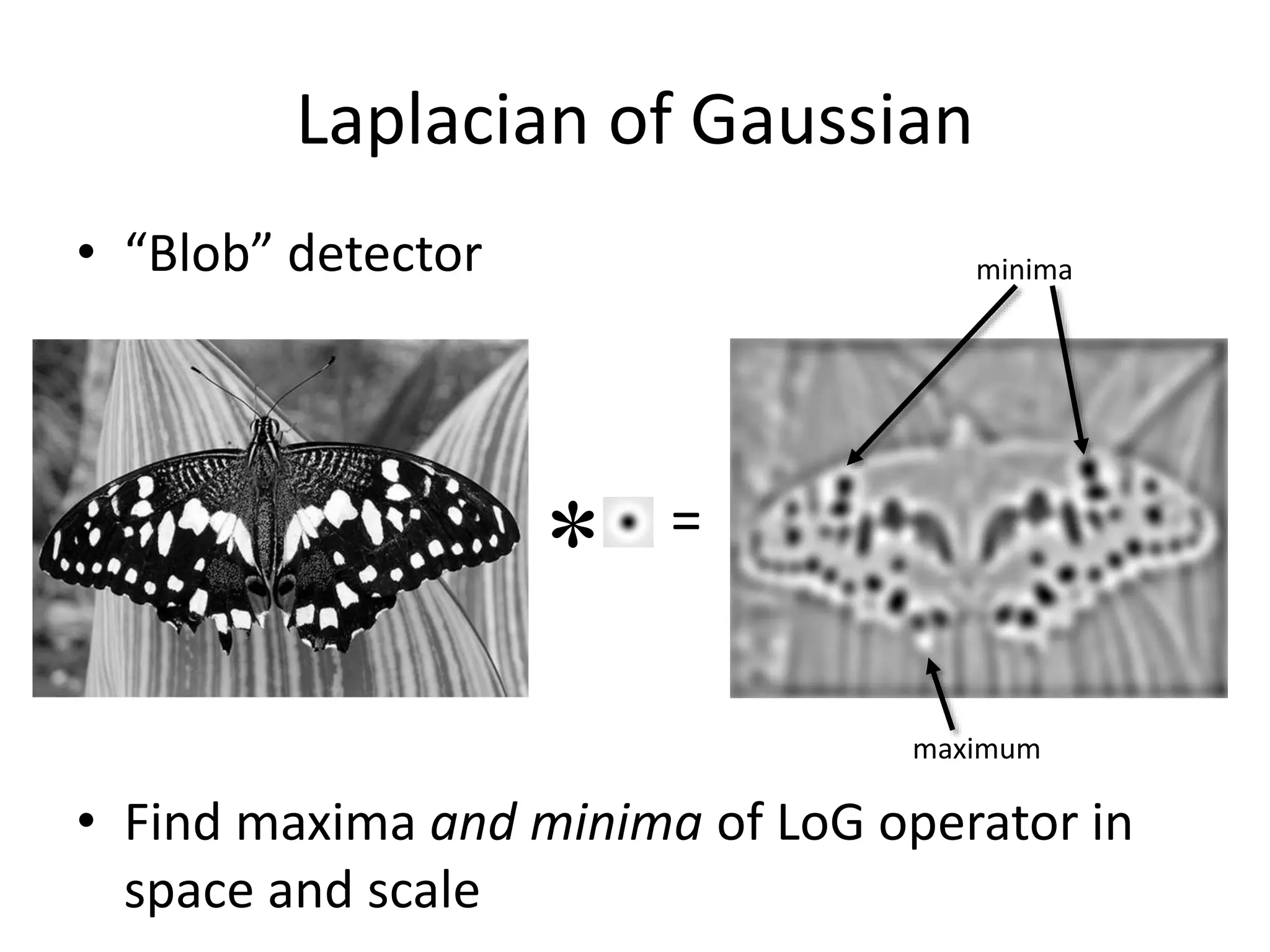
Introduction to corners and blobs in feature extraction.
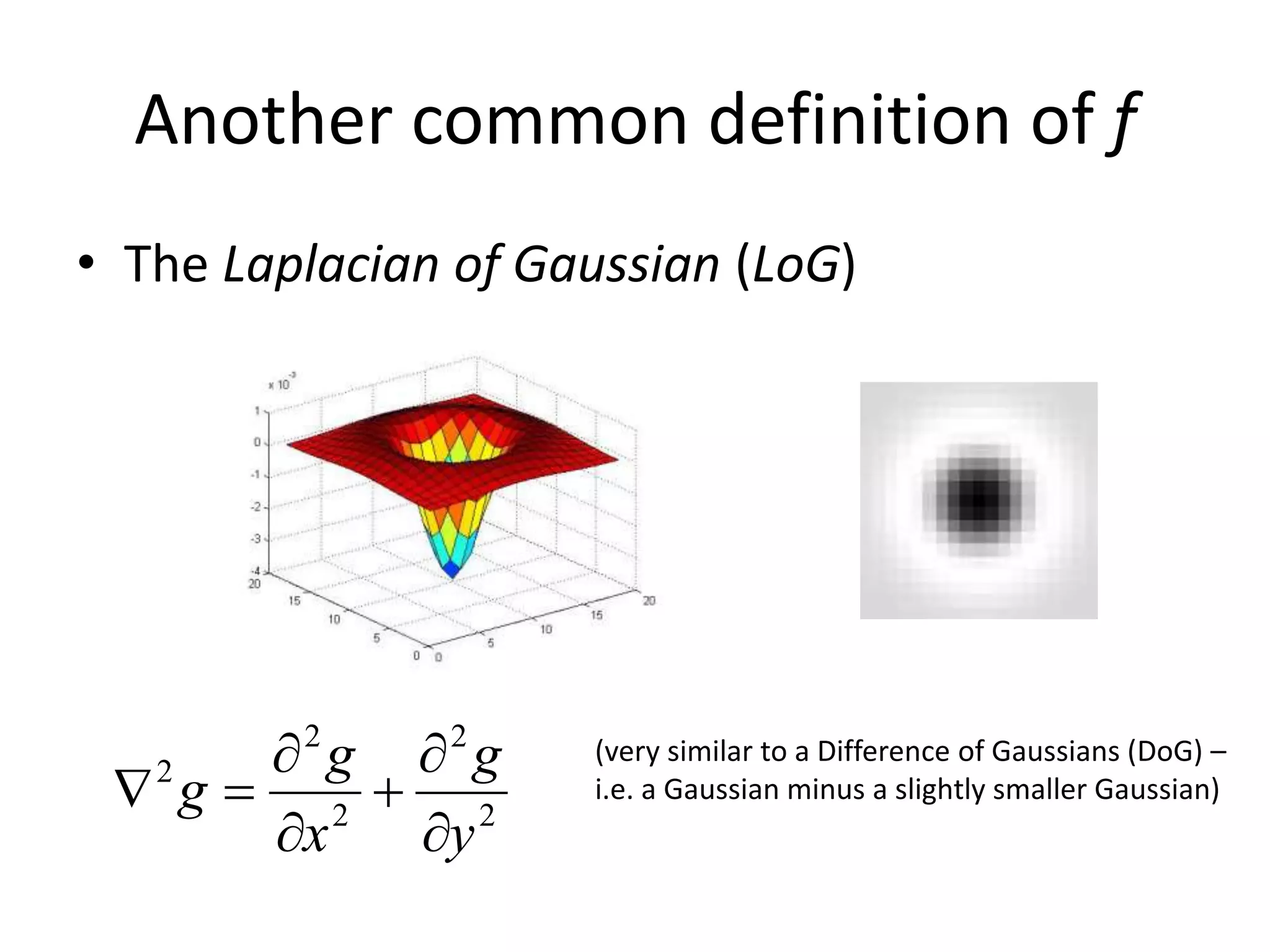
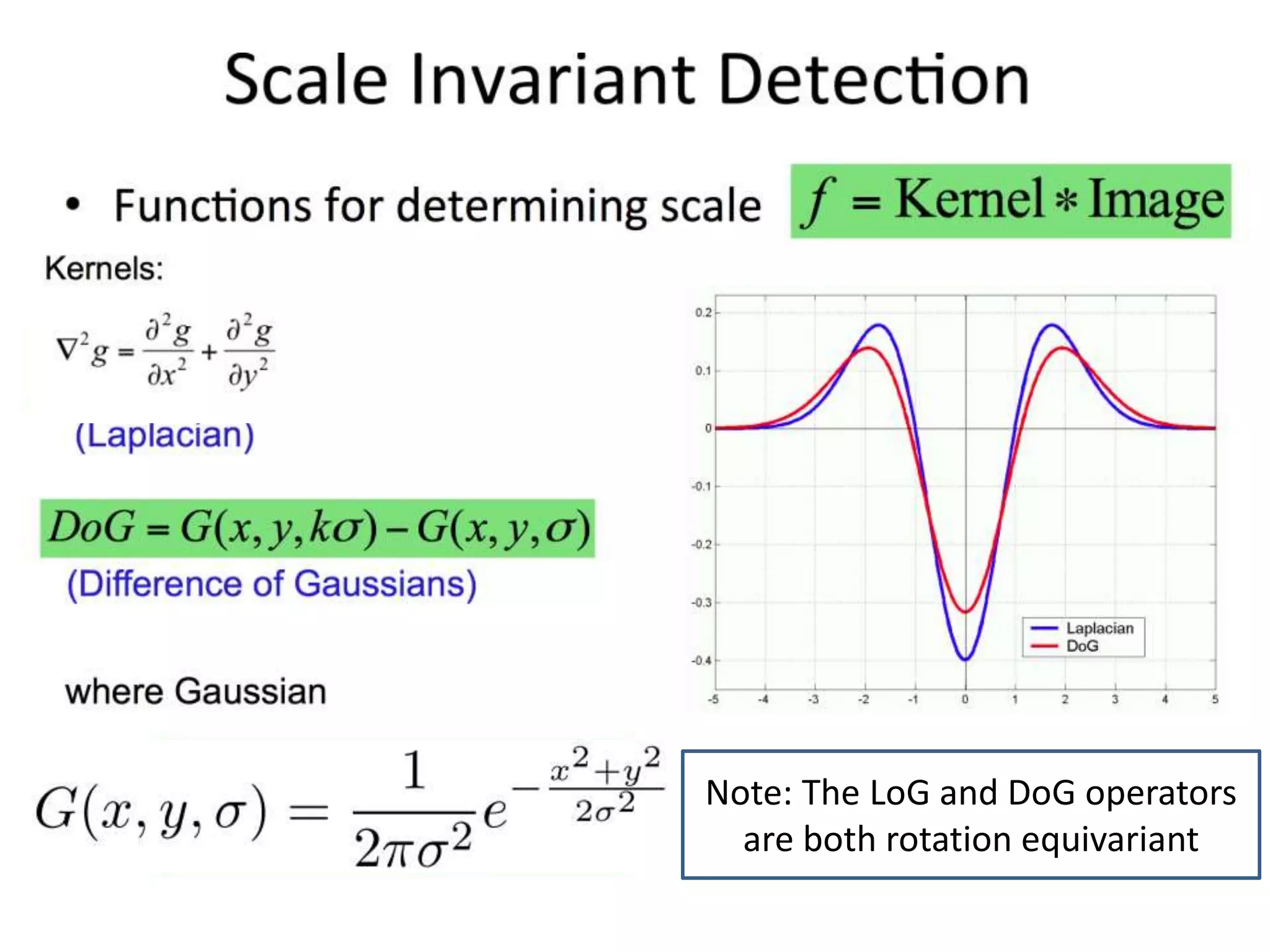
Definition of Laplacian of Gaussian, used for detecting blobs through maxima and minima.
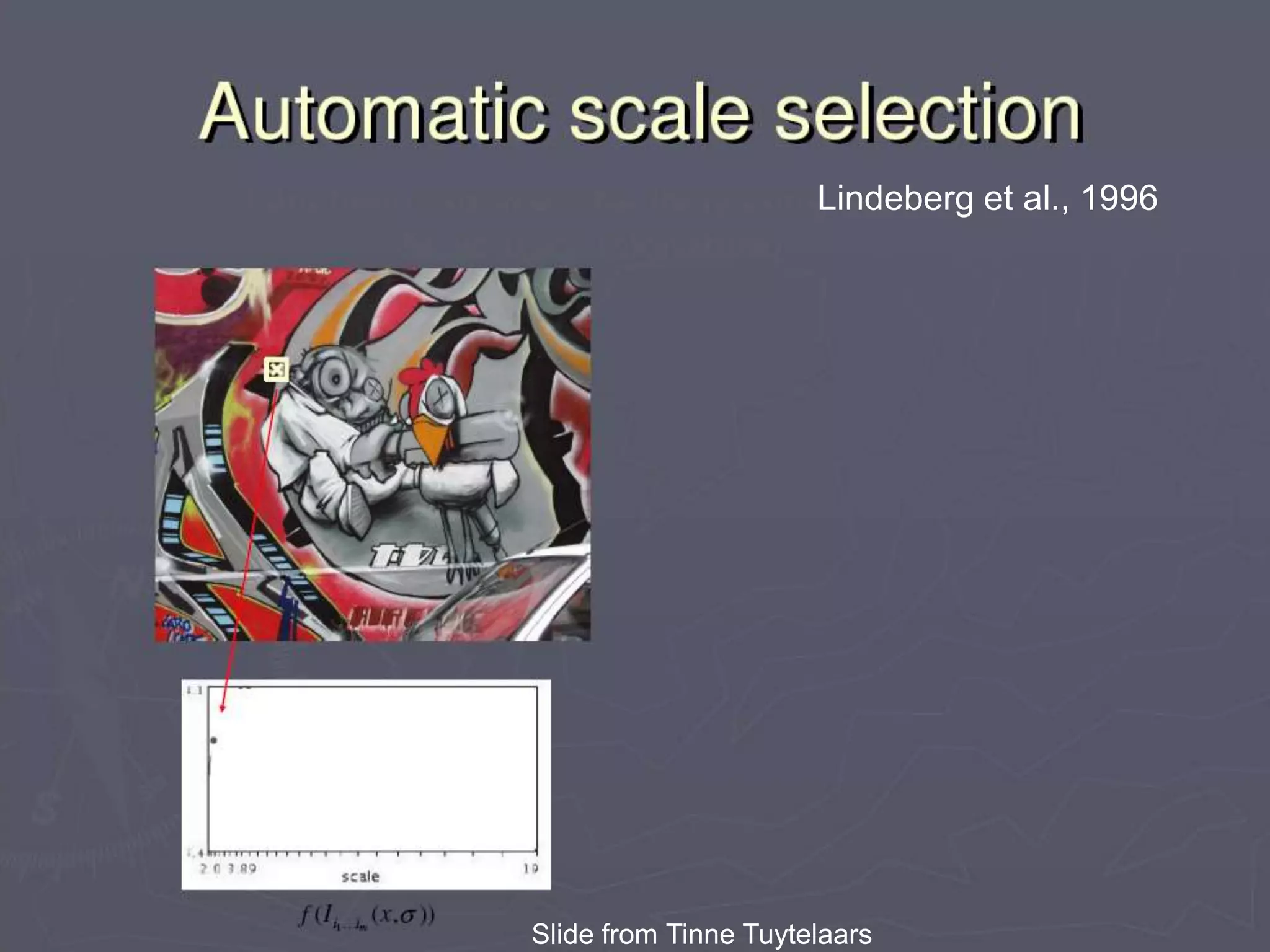
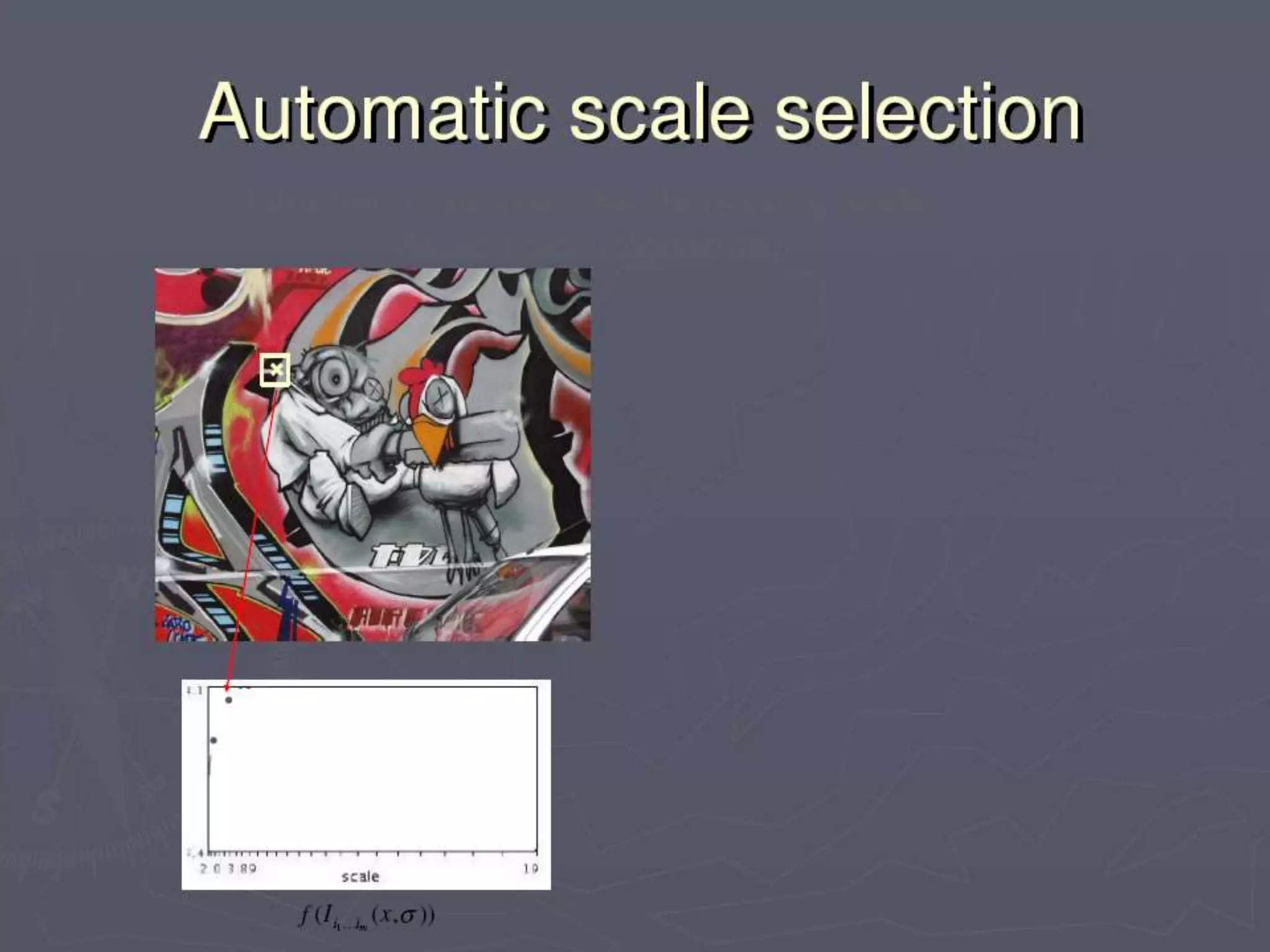
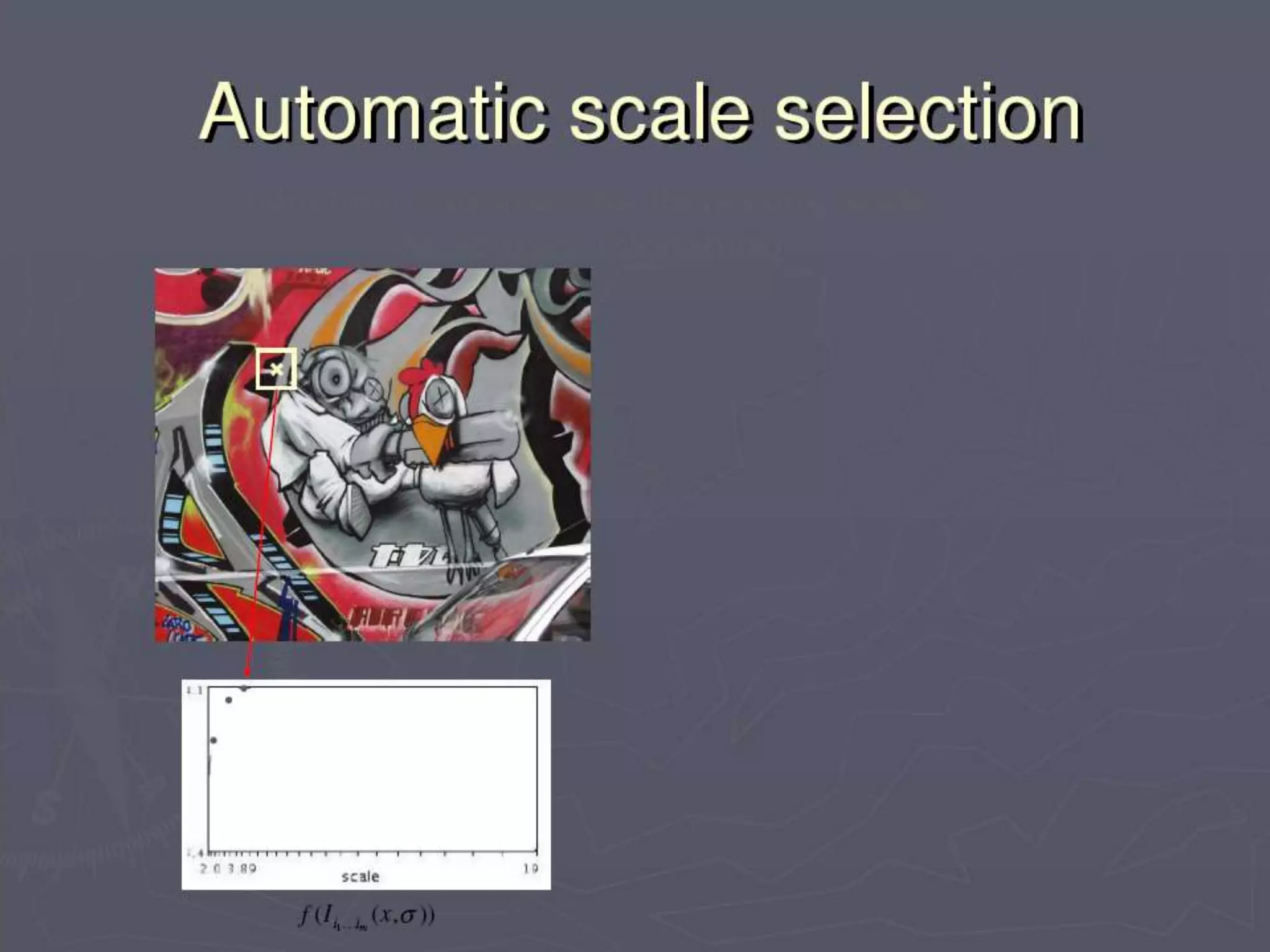
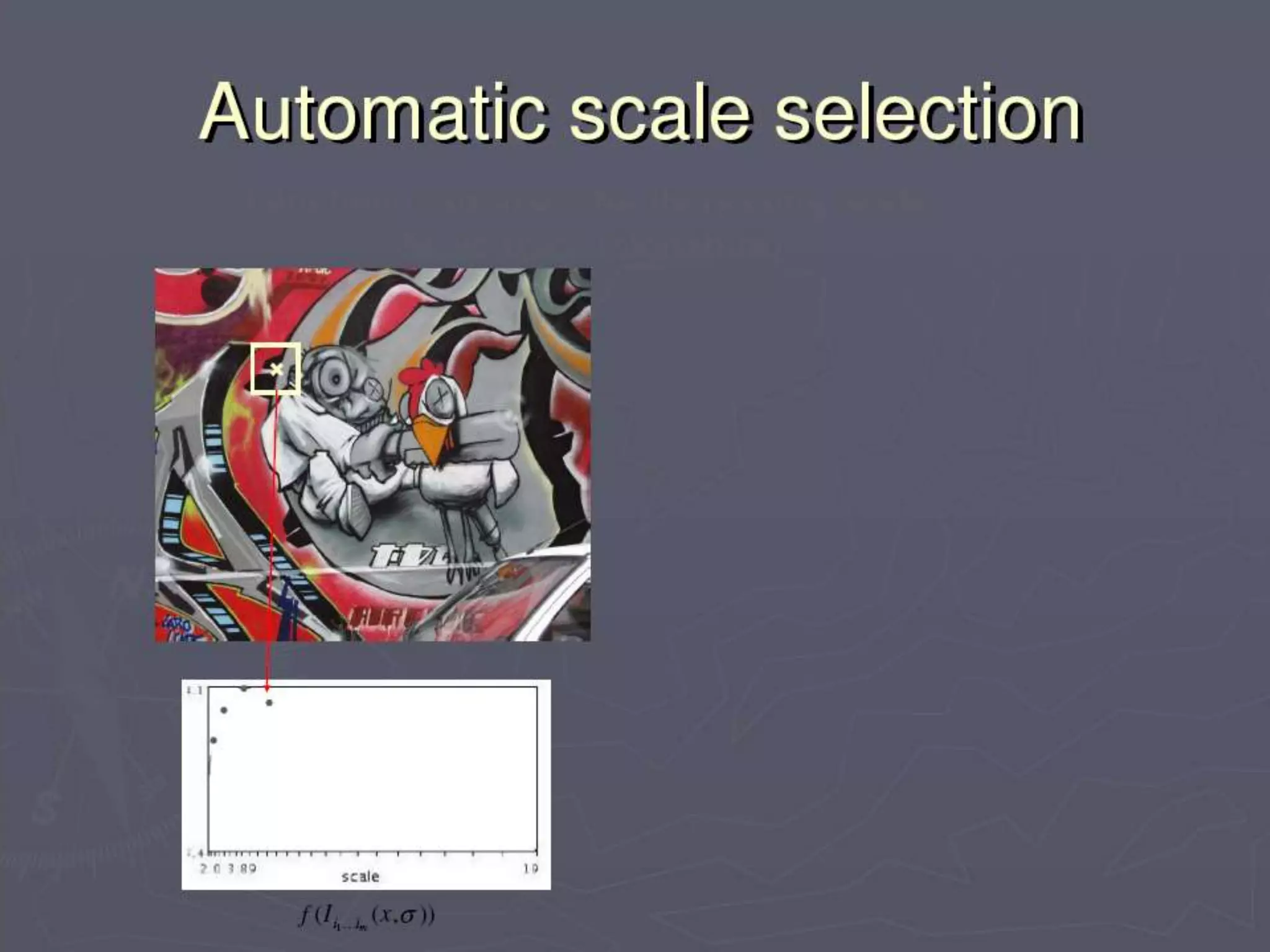
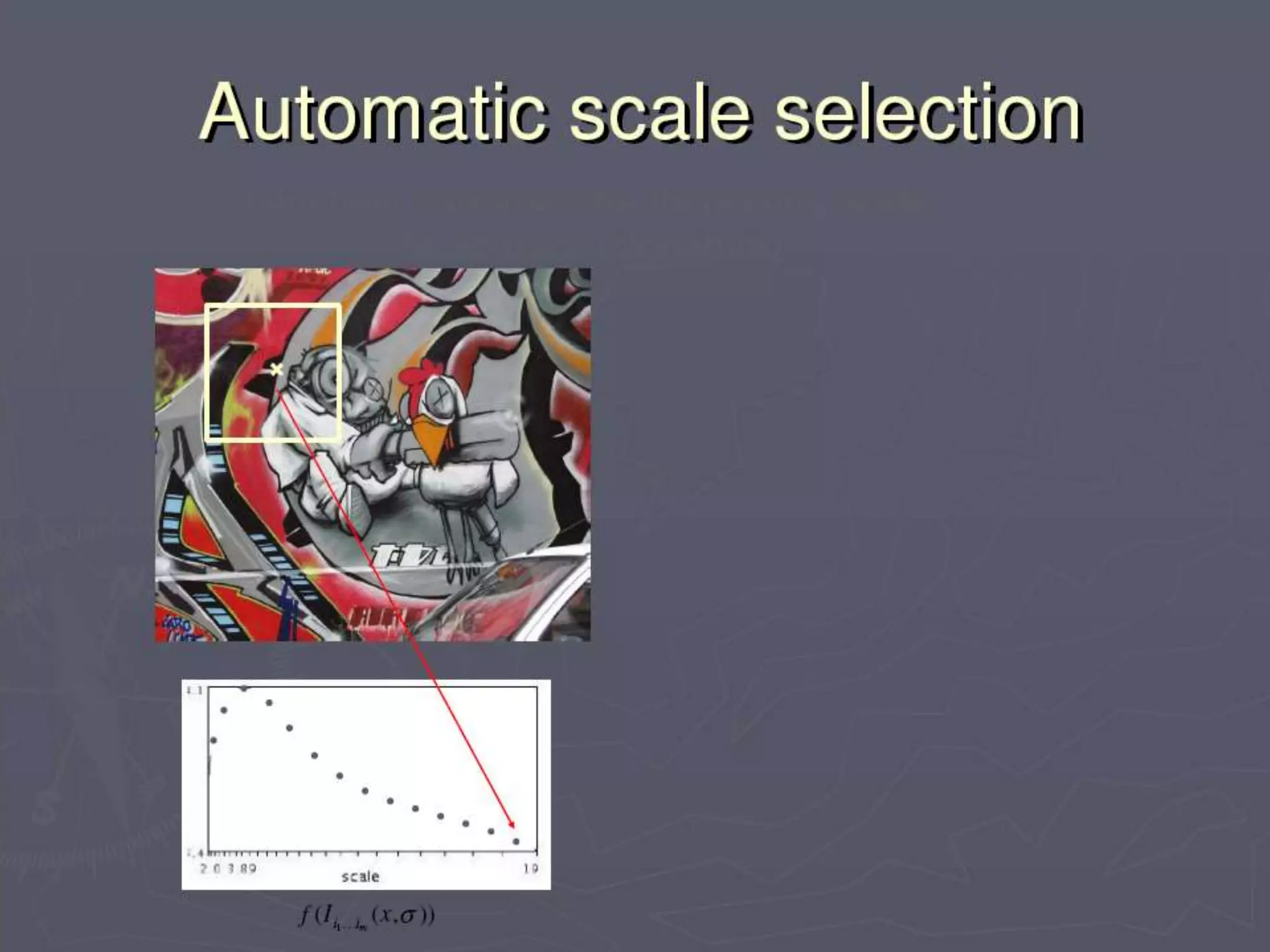
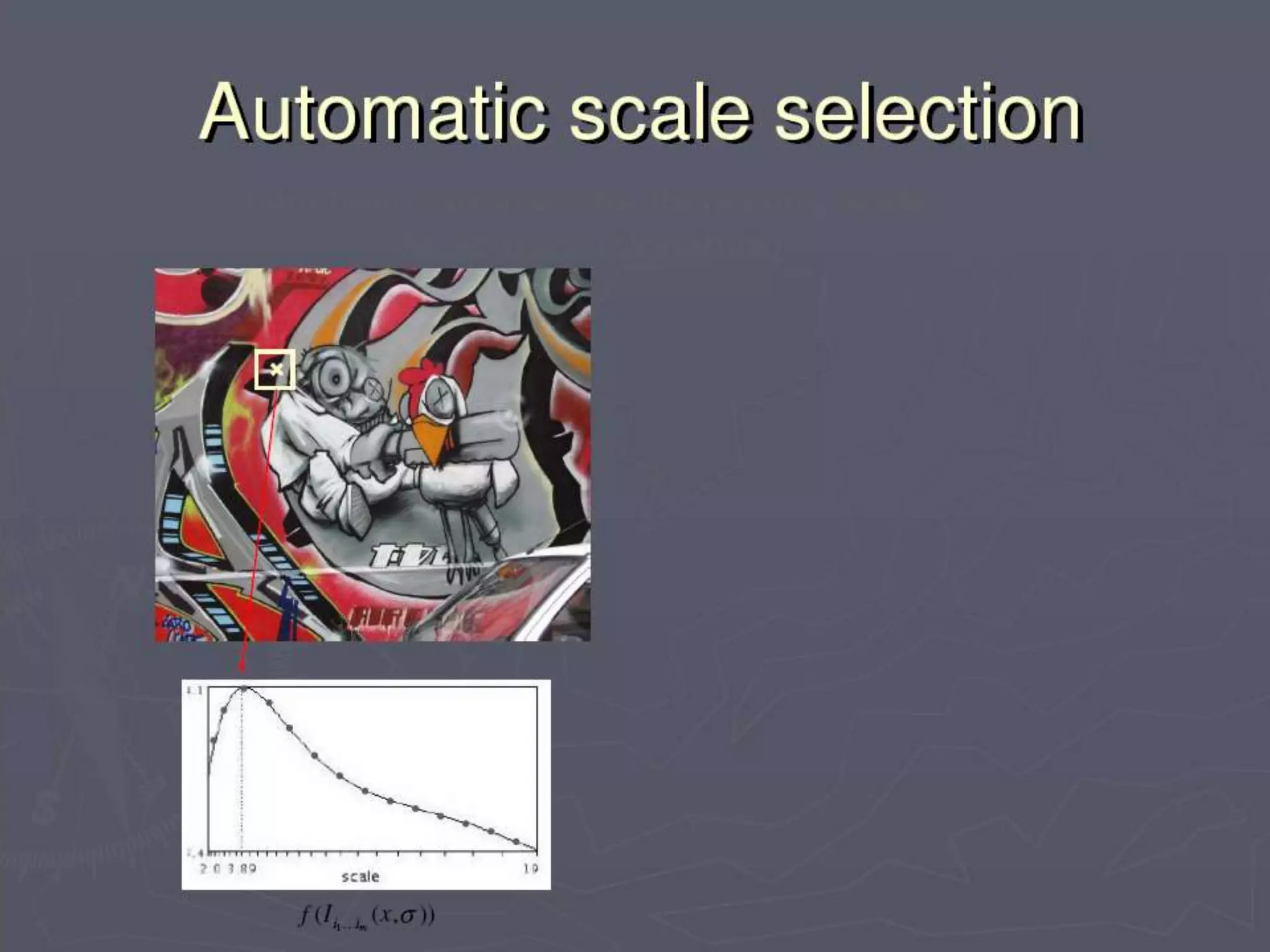
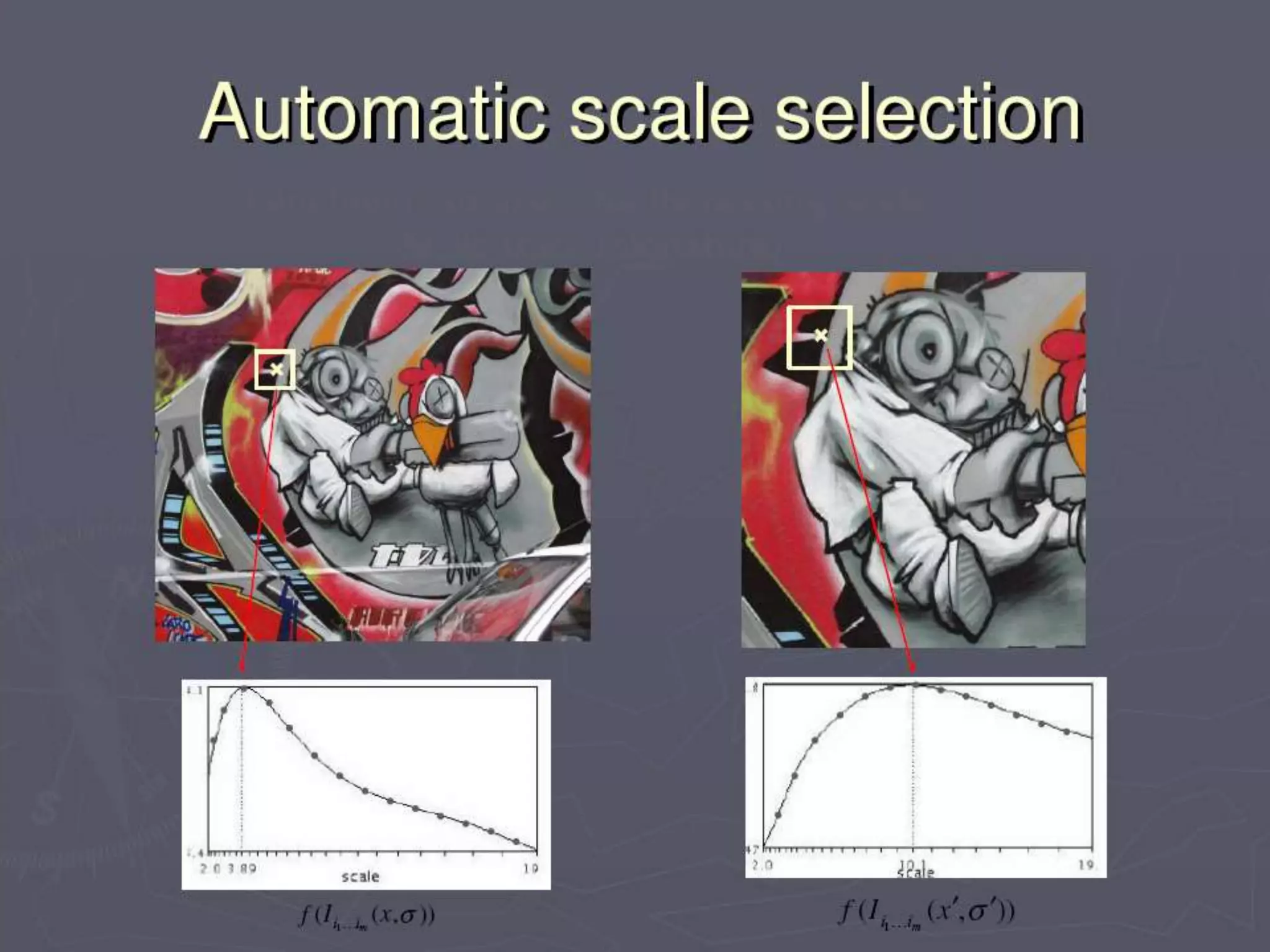
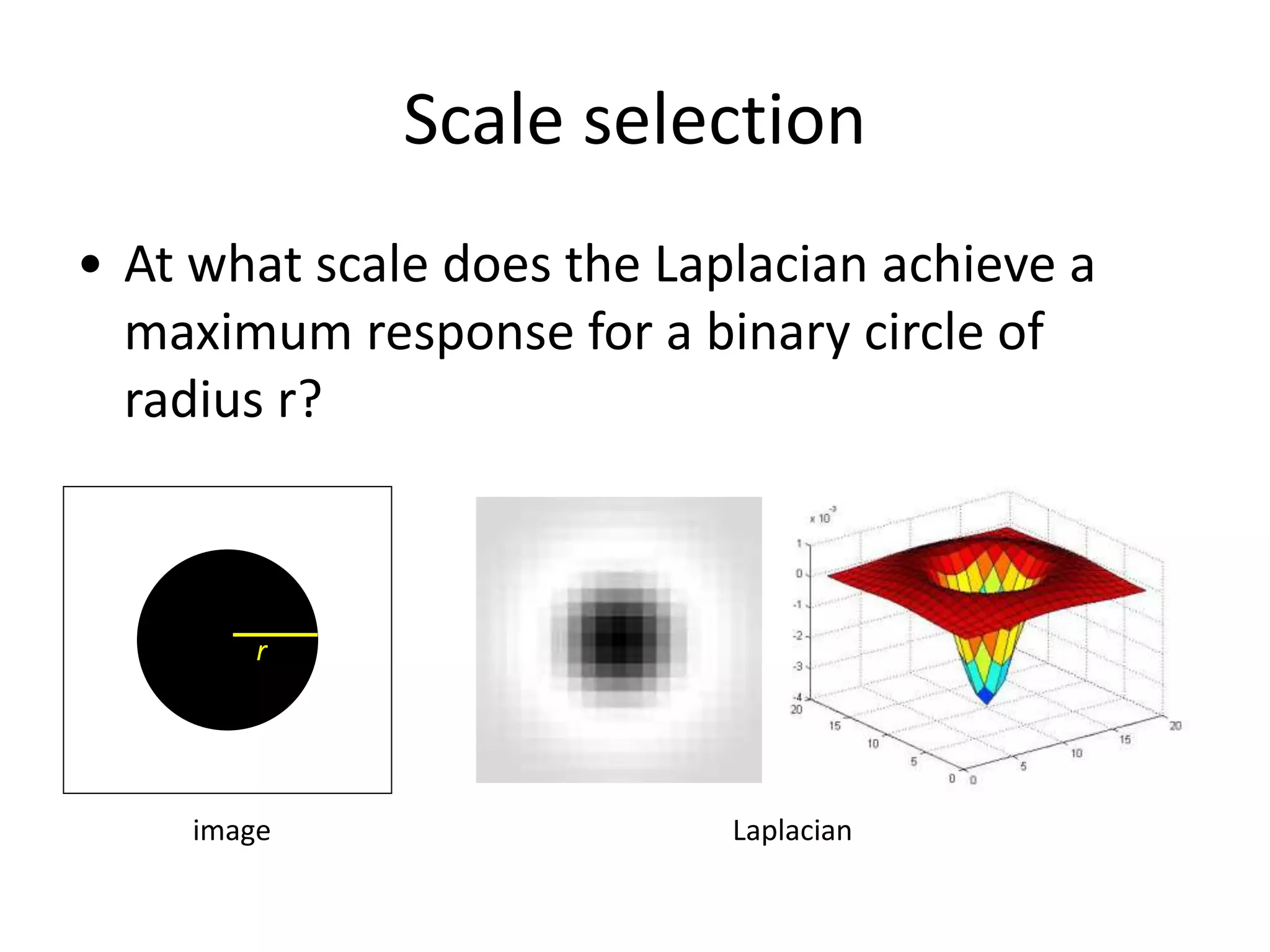
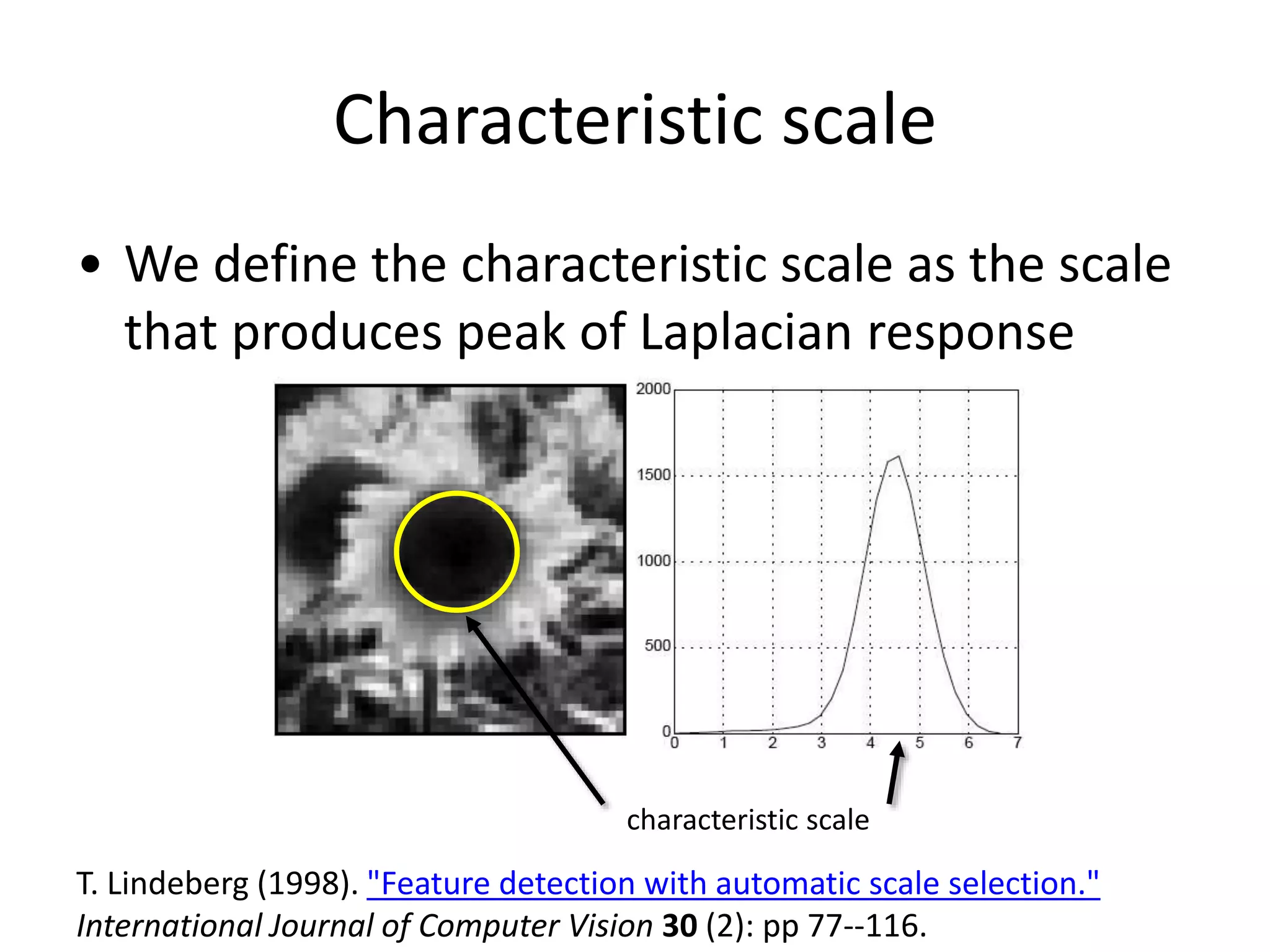
Explains scale selection and characteristic scale in relation to Laplacian response.
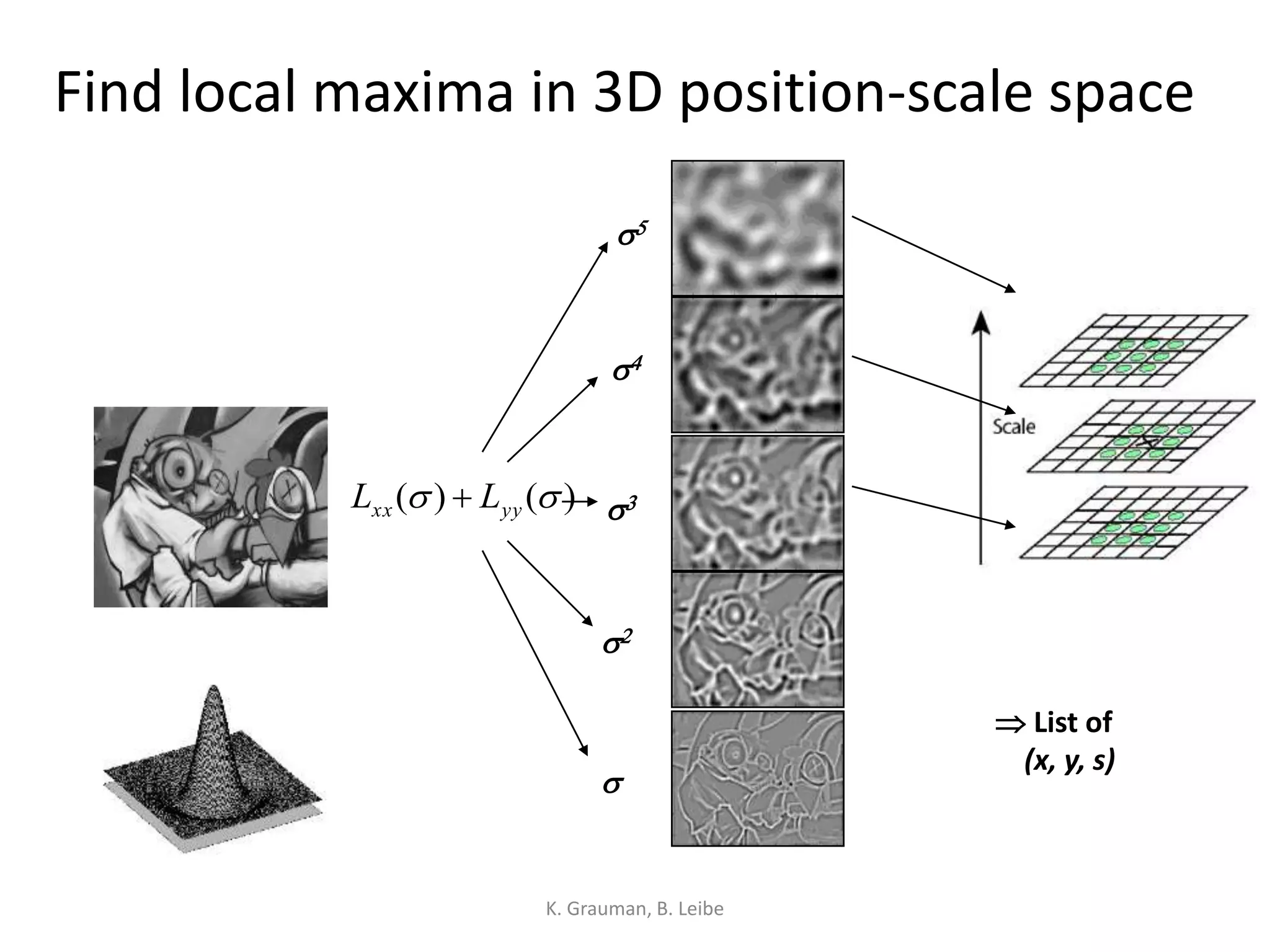
Method to find local maxima in 3D position-scale space.
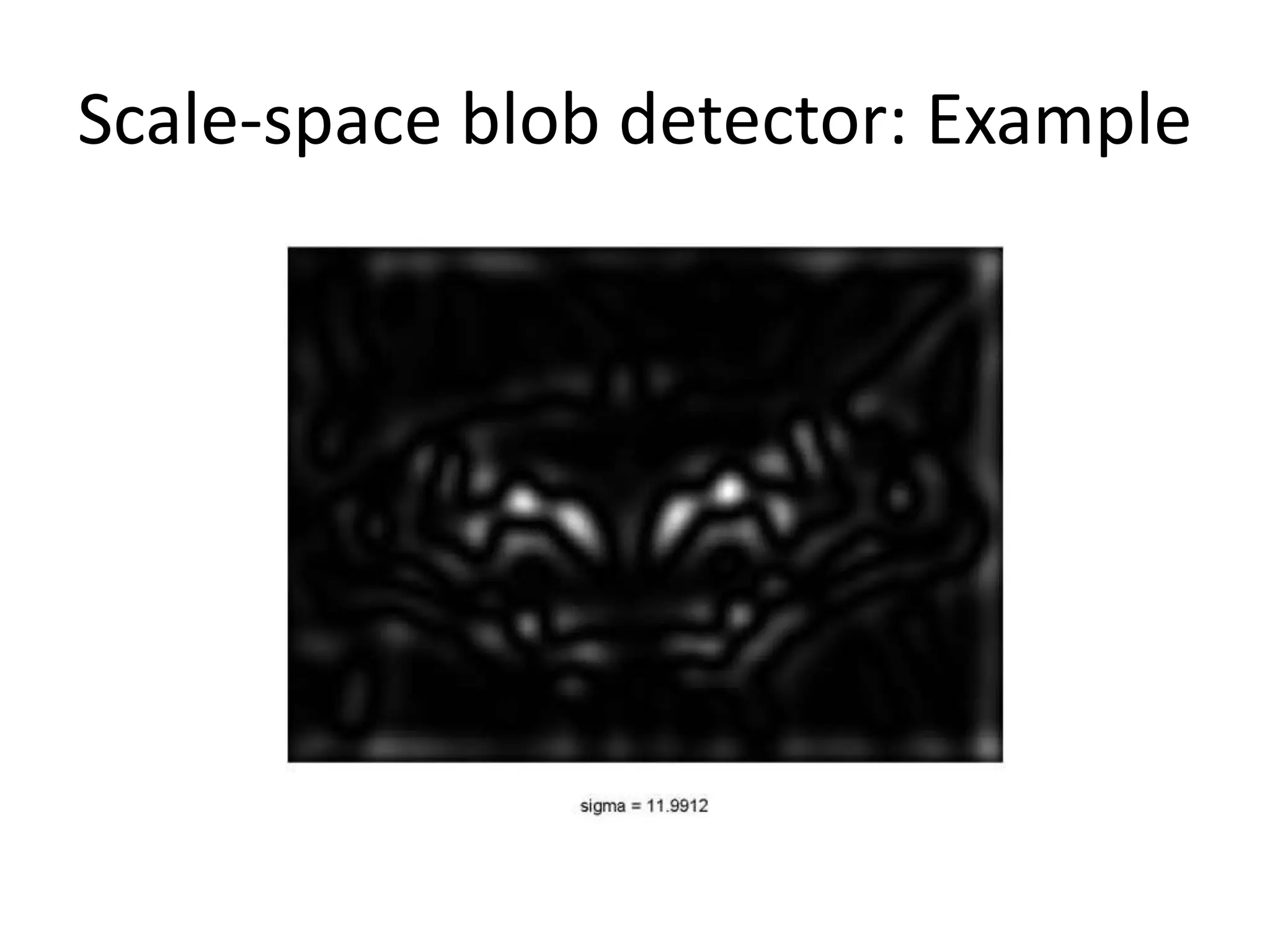
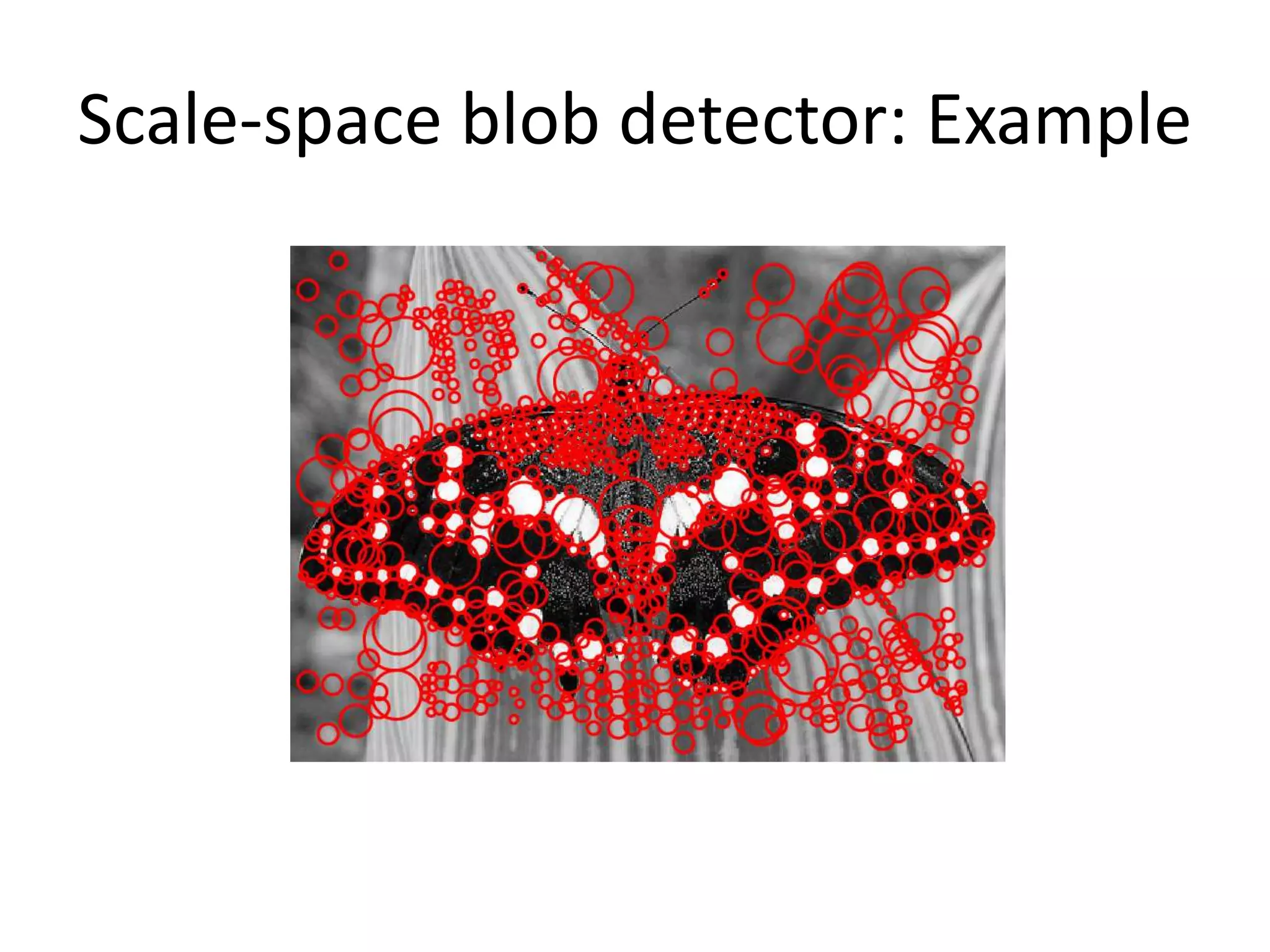
Examples showcasing scale-space blob detector functionality.
Note on the rotation equivariant property of the LoG and DoG operators.
Q&A segment and introduction to feature descriptors for point matching.