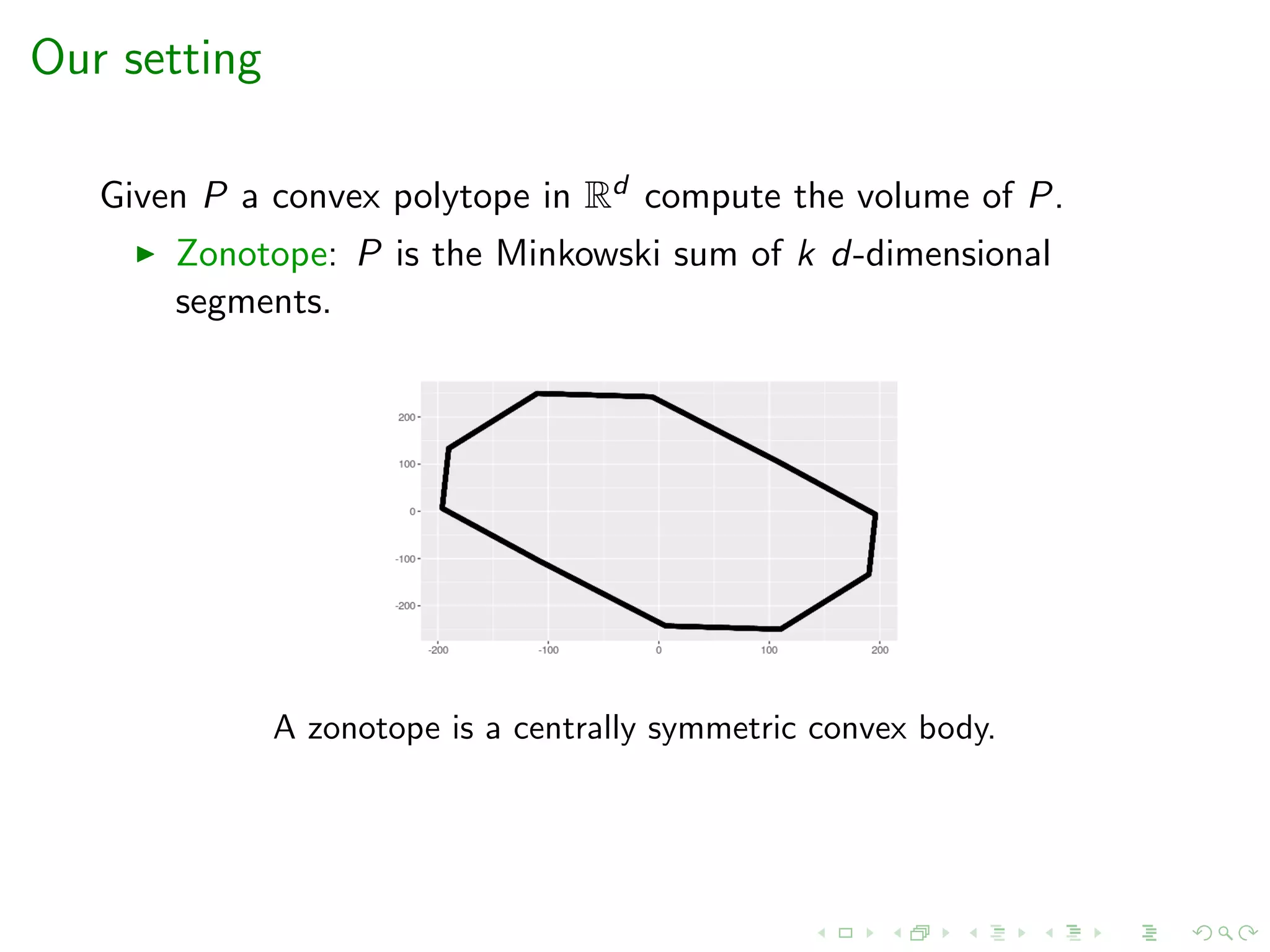
This document presents a new method for estimating the volume of convex polytopes called practical volume estimation by a new annealing schedule. It uses a multiphase Monte Carlo approach with a sequence of concentric convex bodies to approximate the volume. A new simulated annealing method constructs a sparser sequence of bodies. Billiard walk sampling is used for volume-represented and zonotope polytopes. The method scales to dimensions of 100 in an hour for random V-polytopes and zonotopes, outperforming previous methods with theoretical complexity of O*(d^3).
![Complexity
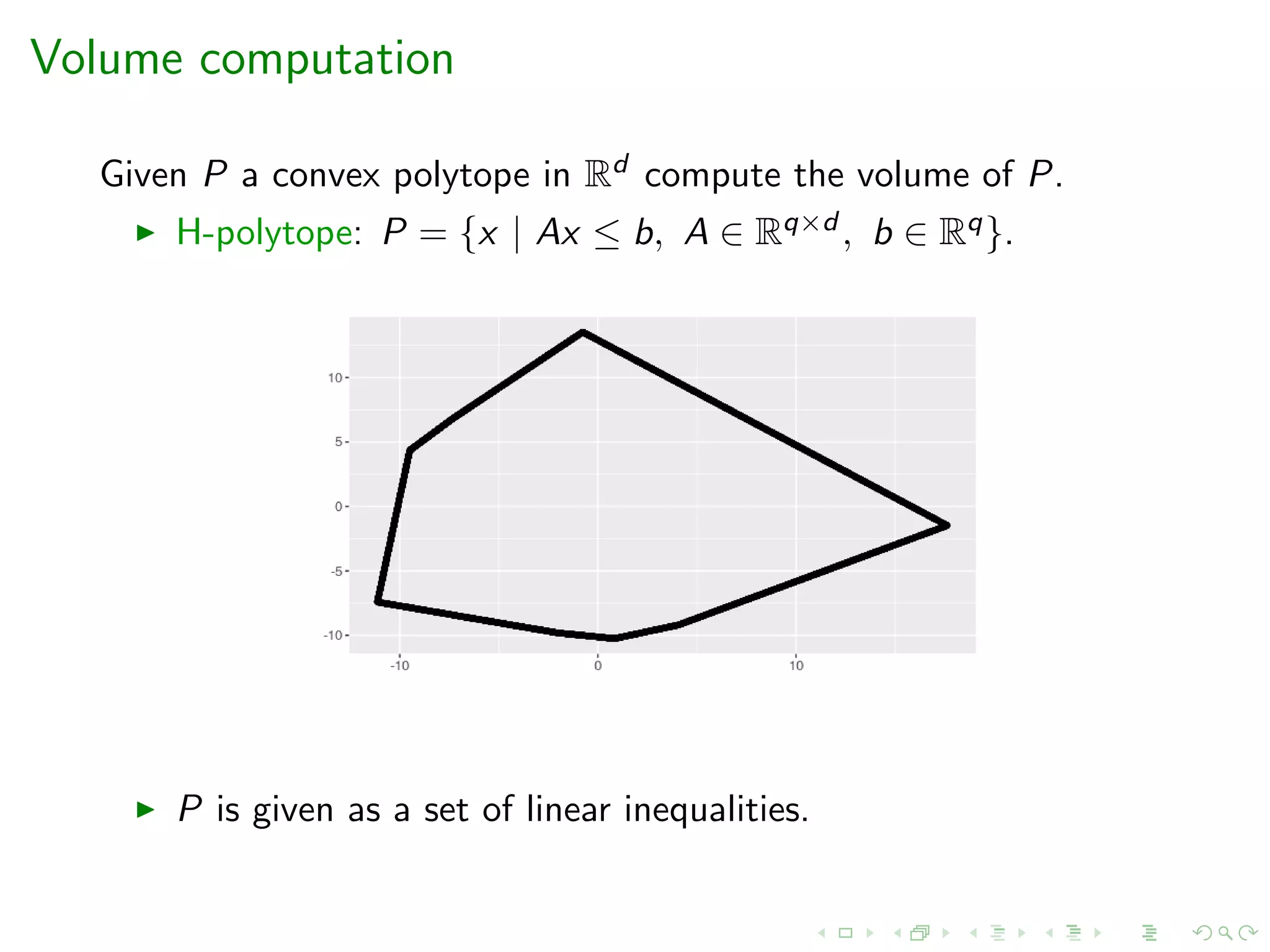
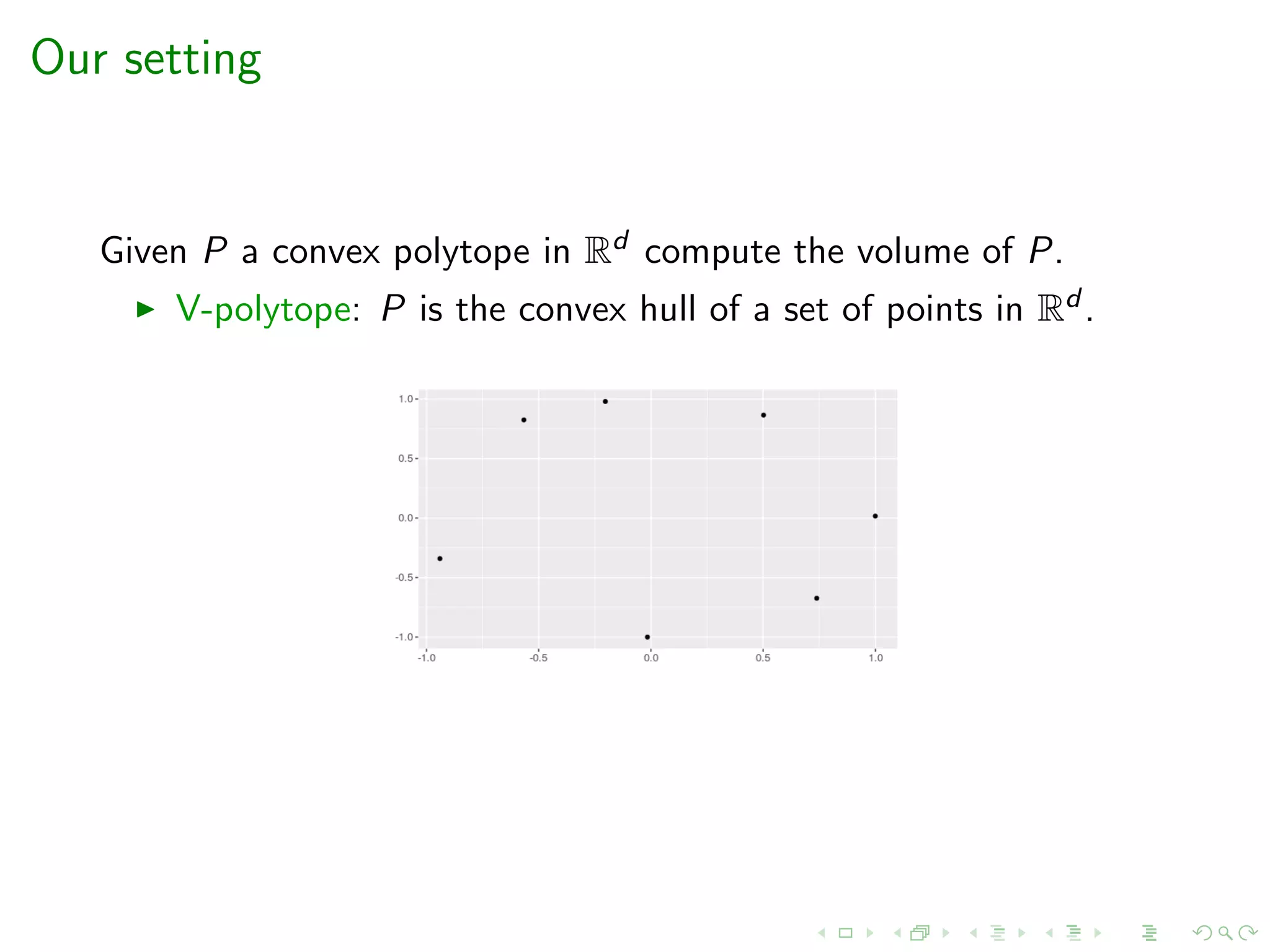
Computing the exact volume of P,
is #P-hard for all the representations [DyerFrieze’88]](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-8-2048.jpg)
![Complexity
Computing the exact volume of P,
is #P-hard for all the representations [DyerFrieze’88]
is open if both H- and V- representations available](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-9-2048.jpg)
![Complexity
Computing the exact volume of P,
is #P-hard for all the representations [DyerFrieze’88]
is open if both H- and V- representations available
is APX-hard (oracle model) [Elekes’86]](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-10-2048.jpg)
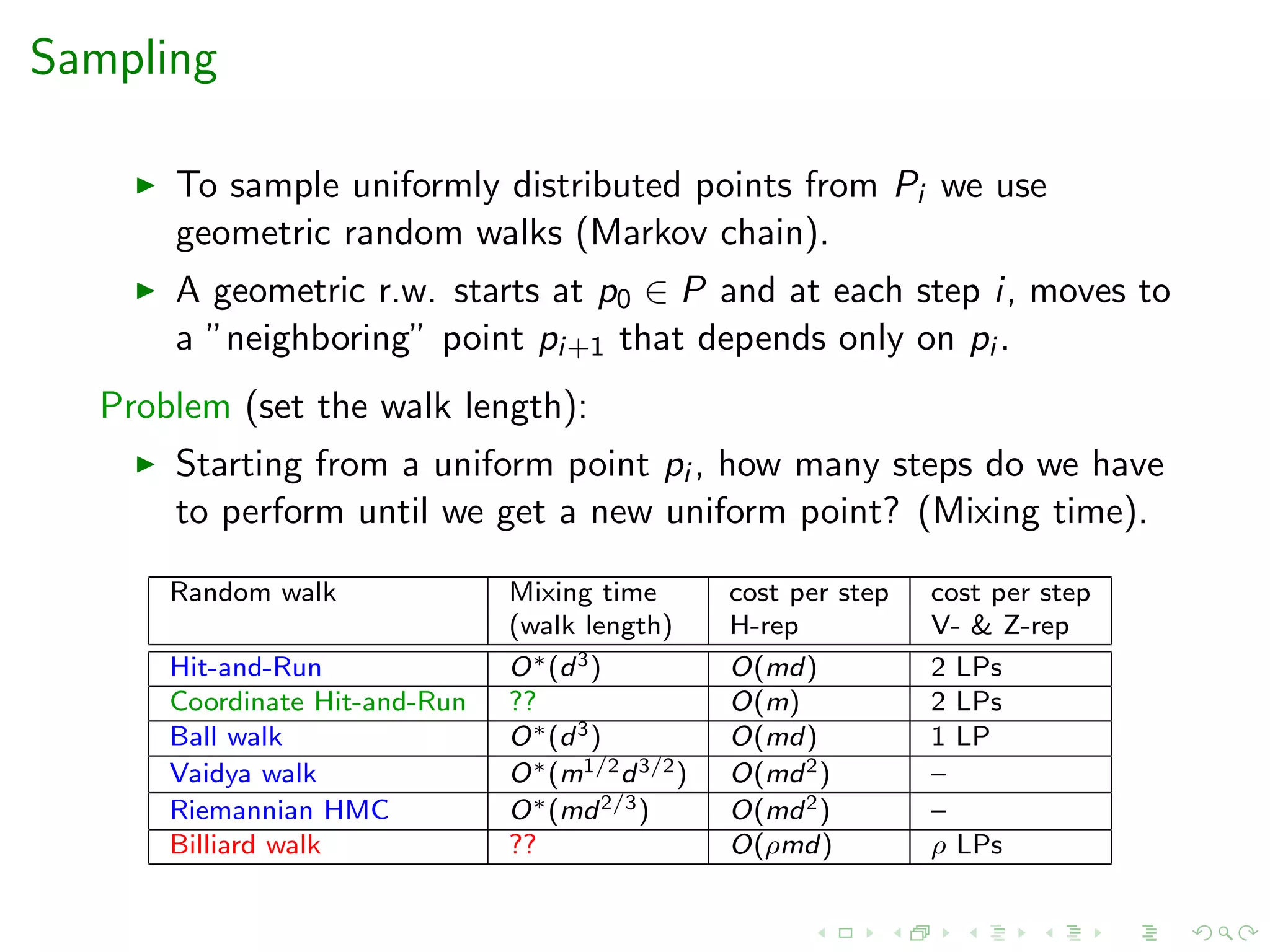
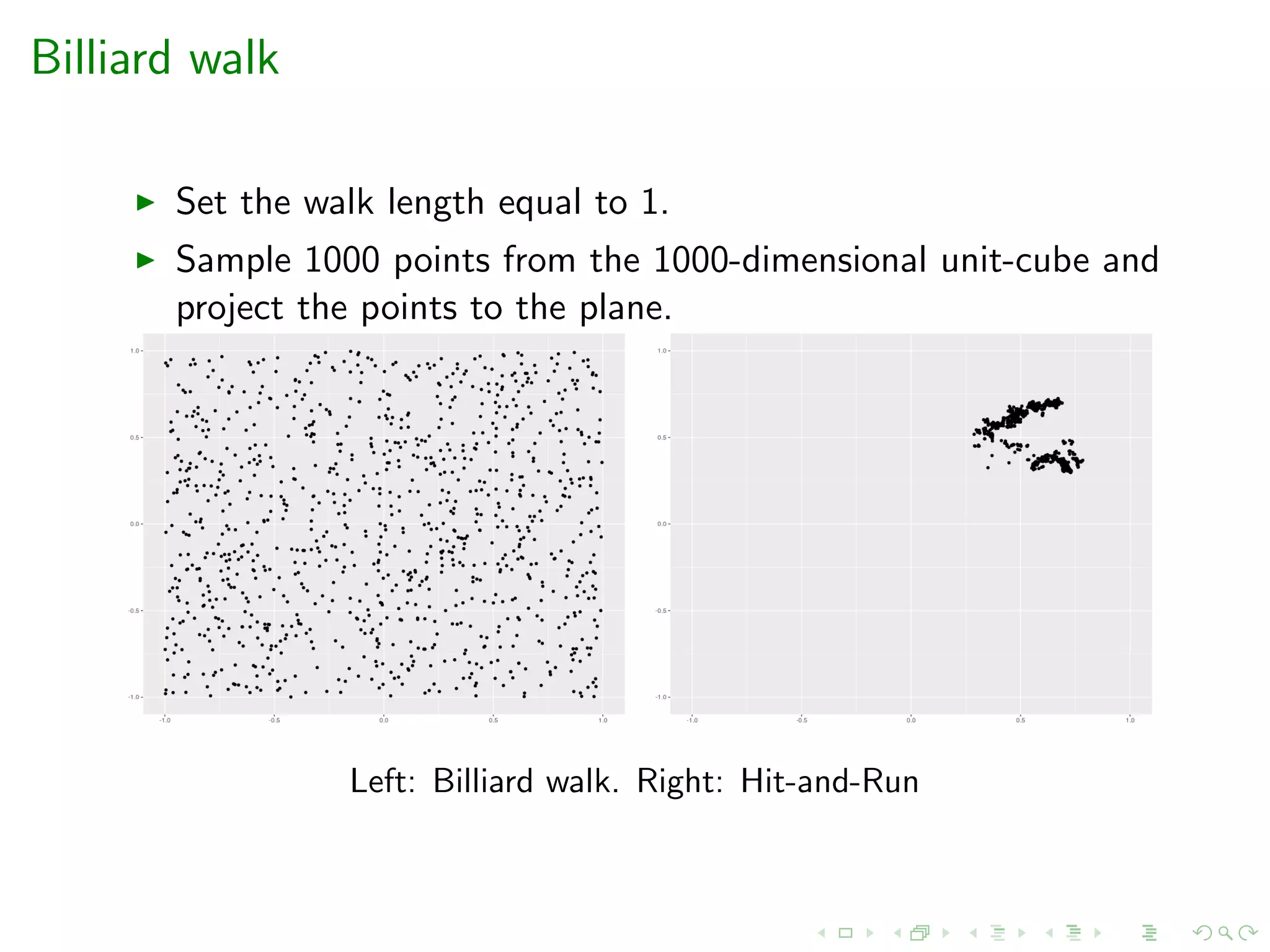
![Sampling
Random walk Mixing time cost per step cost per step
(number of steps) H-rep V- & Z-rep
Coordinate Hit-and-Run ?? O(m) 2 LPs
Billiard walk ?? O(ρmd) ρ LPs
Coordinate Hit-and-Run:
Is the main paradigm in applications and software.
In practice converges to uniform distribution in O(d2) steps
[Cousins, Vempala’17].](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-25-2048.jpg)
![Sampling
Random walk Mixing time cost per step cost per step
(number of steps) H-rep V- & Z-rep
Coordinate Hit-and-Run ?? O(m) 2 LPs
Billiard walk ?? O(ρmd) ρ LPs
Coordinate Hit-and-Run:
Is the main paradigm in applications and software.
In practice converges to uniform distribution in O(d2) steps
[Cousins, Vempala’17].
Billiard walk:
Converges faster to uniform distribution than Hit-and-Run in
practice [Polyak’14].
For V-polytopes and zonotopes has comparable cost per step
with Coordinate Hit-and-Run.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-26-2048.jpg)
![State-of-the-art
Authors-Year Complexity Algorithm
(oracle calls)
[Dyer, Frieze, Kannan’91] O∗(d23) Sequence of balls + grid walk
[Kannan, Lovasz, Simonovits’97] O∗(d5) Sequence of balls + ball walk
[Lovasz, Vempala’03] O∗(d4) Exponential dist. + hit-and-run
[Cousins, Vempala’15] O∗(d3) Spherical Gaussians + ball walk](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-28-2048.jpg)
![State-of-the-art
Authors-Year Complexity Algorithm
(oracle calls)
[Dyer, Frieze, Kannan’91] O∗(d23) Sequence of balls + grid walk
[Kannan, Lovasz, Simonovits’97] O∗(d5) Sequence of balls + ball walk
[Lovasz, Vempala’03] O∗(d4) Exponential dist. + hit-and-run
[Cousins, Vempala’15] O∗(d3) Spherical Gaussians + ball walk
Practical methods:
Follow theory but make practical adjustments (experimental).](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-29-2048.jpg)
![State-of-the-art
Authors-Year Complexity Algorithm
(oracle calls)
[Dyer, Frieze, Kannan’91] O∗(d23) Sequence of balls + grid walk
[Kannan, Lovasz, Simonovits’97] O∗(d5) Sequence of balls + ball walk
[Lovasz, Vempala’03] O∗(d4) Exponential dist. + hit-and-run
[Cousins, Vempala’15] O∗(d3) Spherical Gaussians + ball walk
Practical methods:
Follow theory but make practical adjustments (experimental).
[Emiris, F’14] Sequence of balls + coordinate hit-and-run.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-30-2048.jpg)
![State-of-the-art
Authors-Year Complexity Algorithm
(oracle calls)
[Dyer, Frieze, Kannan’91] O∗(d23) Sequence of balls + grid walk
[Kannan, Lovasz, Simonovits’97] O∗(d5) Sequence of balls + ball walk
[Lovasz, Vempala’03] O∗(d4) Exponential dist. + hit-and-run
[Cousins, Vempala’15] O∗(d3) Spherical Gaussians + ball walk
Practical methods:
Follow theory but make practical adjustments (experimental).
[Emiris, F’14] Sequence of balls + coordinate hit-and-run.
[Cousins, Vempala’16] Spherical Gaussians + coordinate
hit-and-run](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-31-2048.jpg)
![Limitations
Limitations of existing practical methods:
Efficient only for H-polytopes (scale up-to few hundred dims in
hrs)
For V-polytopes or zonotopes:
Both of them request an inscribed ball (ideally the maximum)
C ⊆ P.
The number of total steps is strongly determined by the radius
of C.
[Cousins, Vempala’16] needs a bound on the number of facets.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-33-2048.jpg)
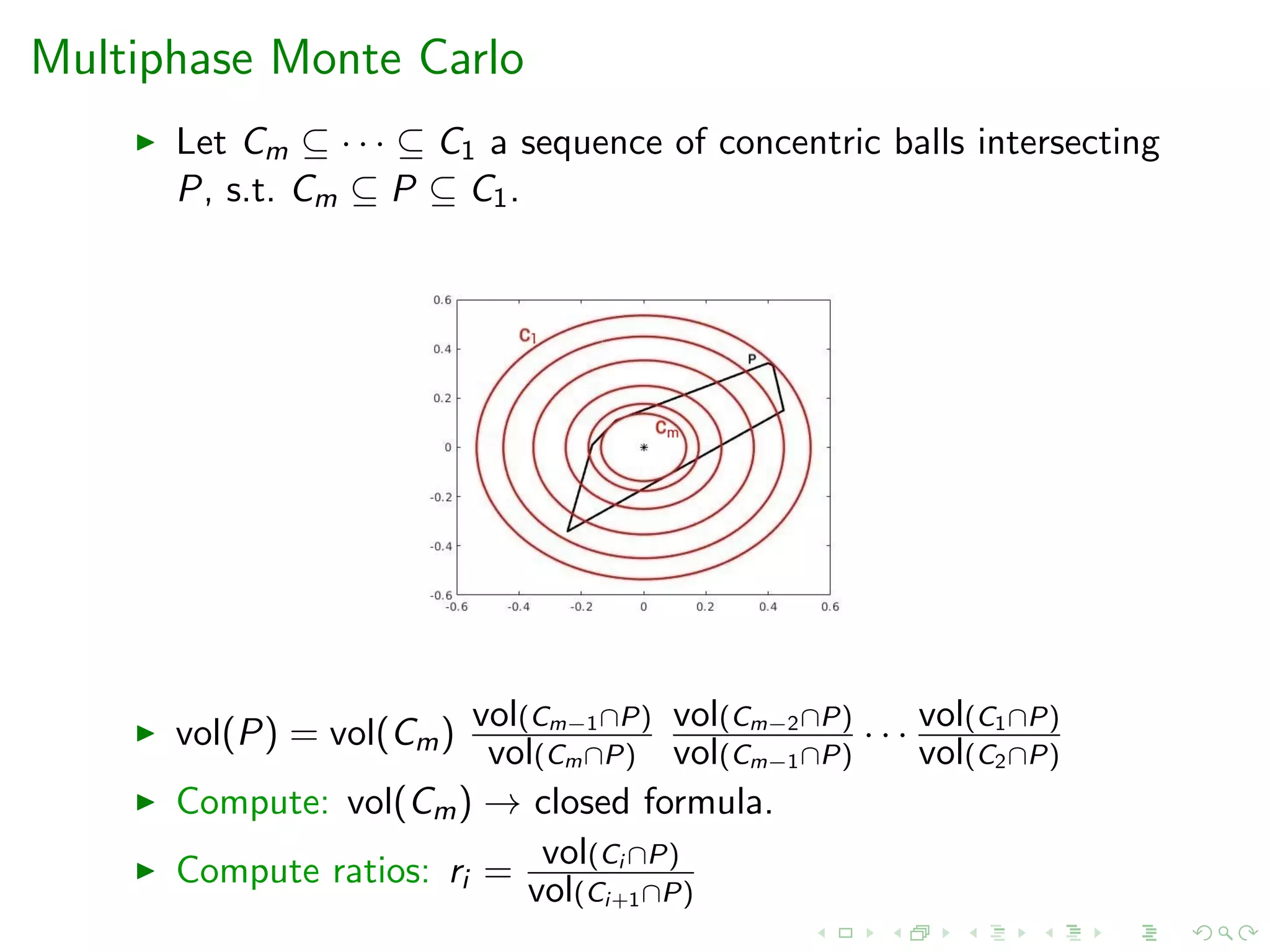
![Our contributions
Multiphase Monte Carlo: We allow any convex body C (that
”fits well” to P and is ”easy” to sample from) besides ball to
construct the sequence.
Sampling: Billiard walk to V-polytopes and zonotopes.
A new simulated annealing method to construct a sparser
sequence of bodies.
Sequence by [L.S.’97] (left) and by annealing schedule (right).](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-36-2048.jpg)
![Our contributions
Multiphase Monte Carlo: We allow any convex body C (that
”fits well” to P and is ”easy” to sample from) besides ball to
construct the sequence.
Sampling: Billiard walk to V-polytopes and zonotopes.
A new simulated annealing method to construct a sparser
sequence of bodies.
Sequence by [L.S.’97] (left) and by annealing schedule (right).
Our method can be easily extended for any polytope P that is
given as a projection of a polytope Q.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-37-2048.jpg)
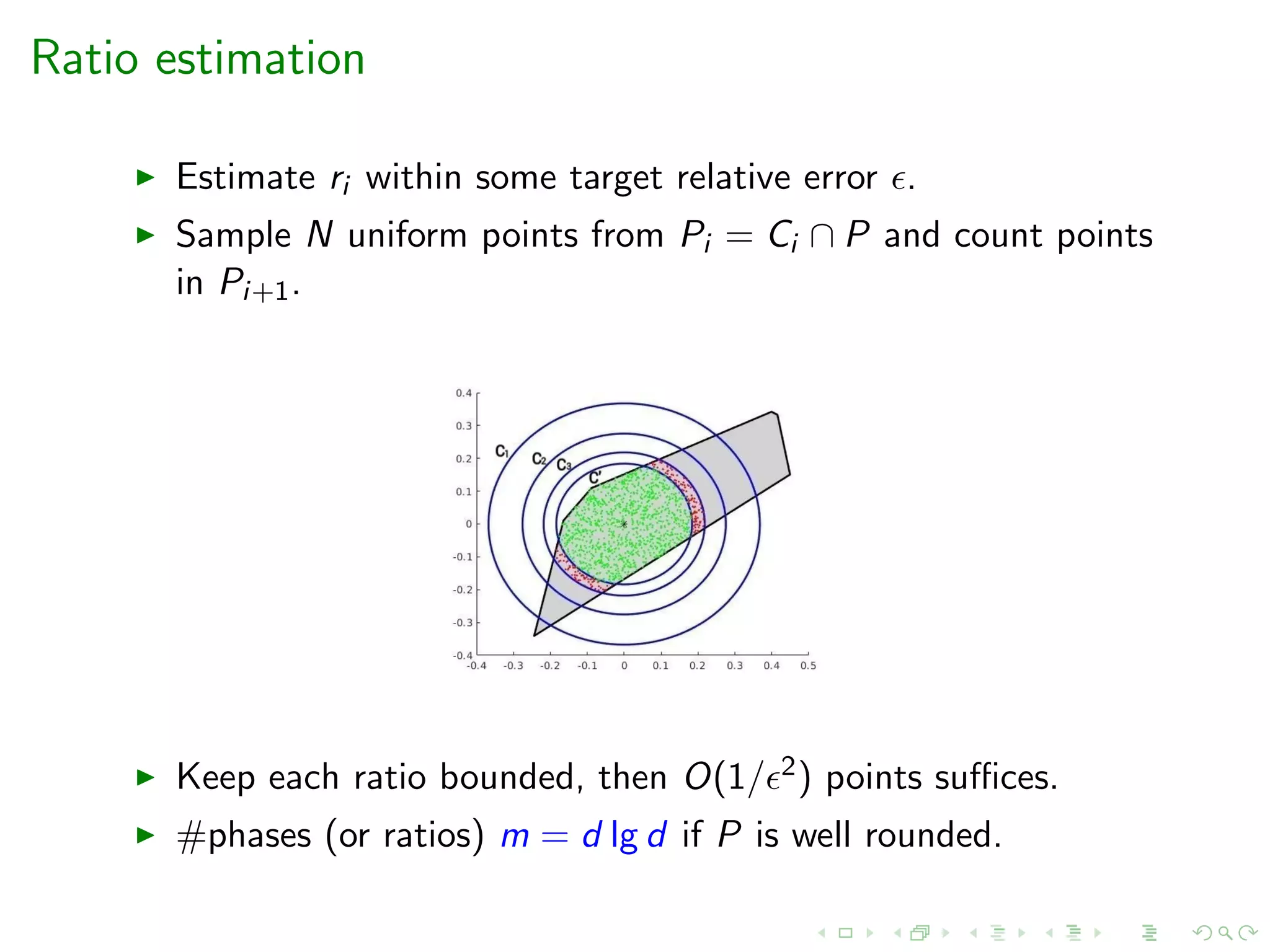
![Annealing Schedule
Inputs: Polytope P, body C, cooling parameters r, δ > 0.
Output: A sequence of scaled copies of C, Cm ⊆ · · · ⊆ C1 s.t.
vol(Pi+1)/vol(Pi ) ∈ [r, r + δ] with high probability
where Pi = Ci ∩ P, i = 1, . . . , m and P0 = P.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-38-2048.jpg)
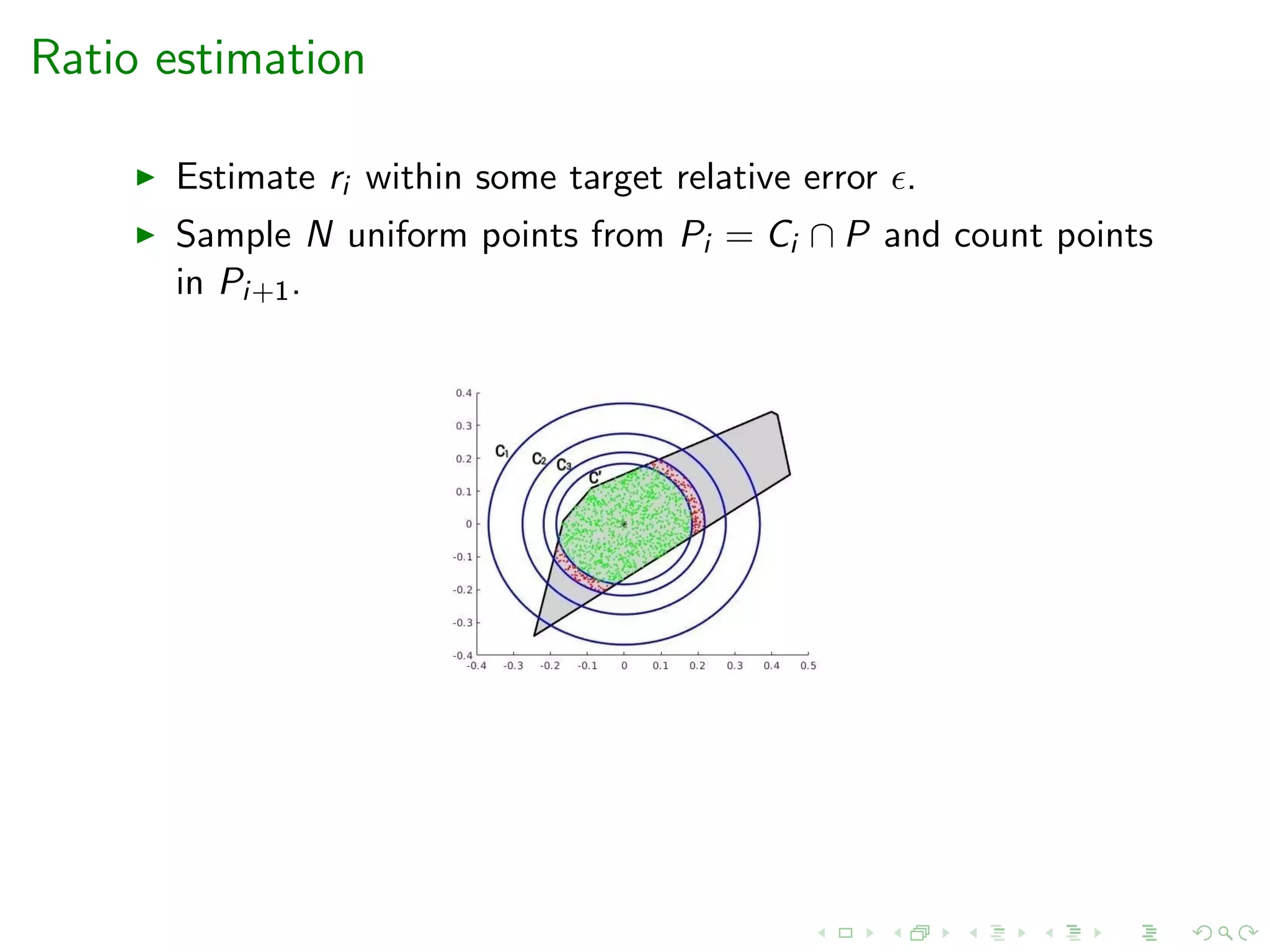
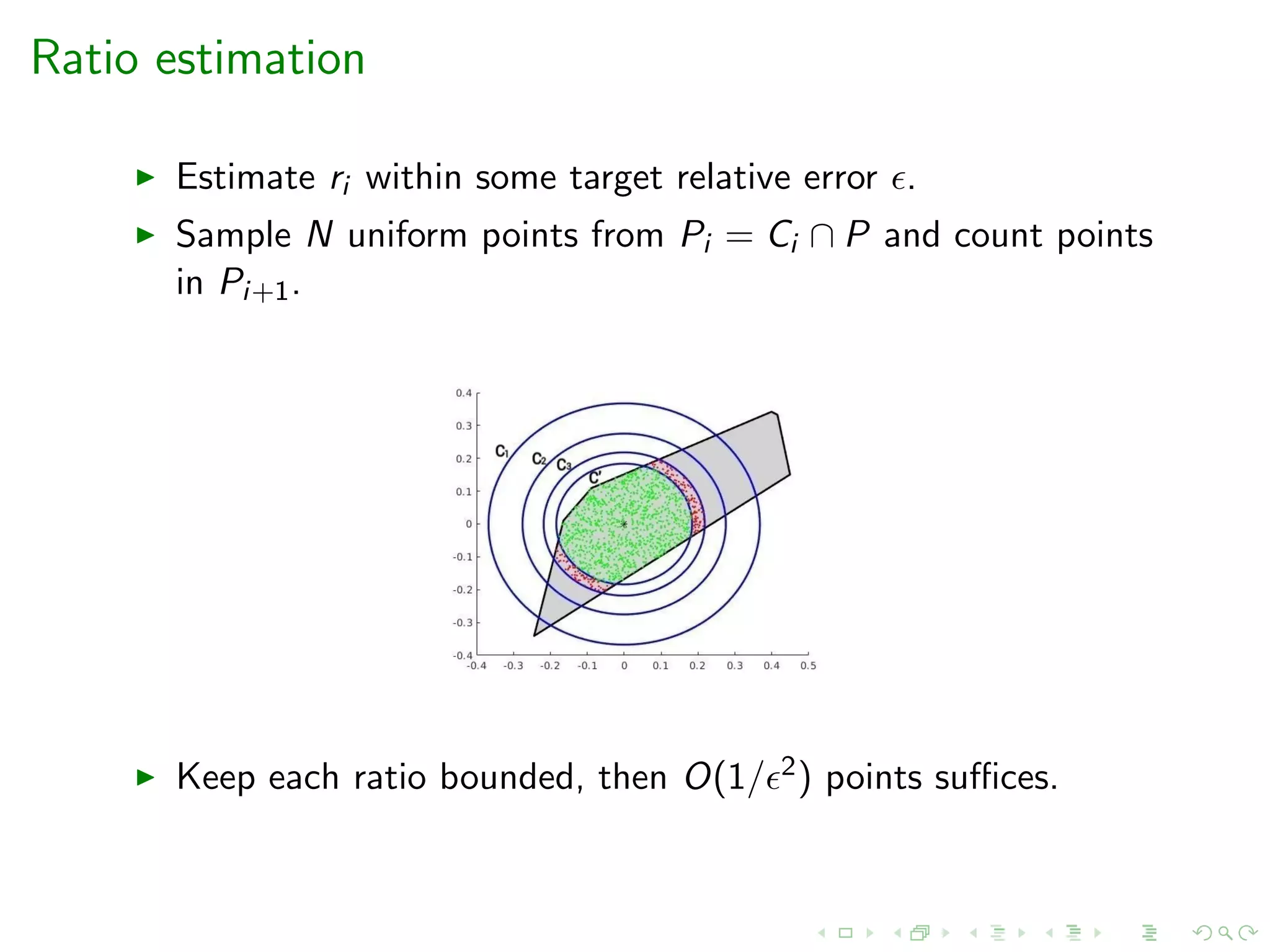
![Statistical tests
for the ratio of volumes of convex bodies
Given convex bodies Pi ⊇ Pi+1, we define two statistical tests:
testL(Pi , Pi+1, r, δ): testR(Pi , Pi+1, r, δ):
H0 : vol(Pi+1)/vol(Pi ) ≥ r + δ H0 : vol(Pi+1)/vol(Pi ) ≤ r
Successful if we reject H0 Successful if we reject H0
If both testL and testR are successful then
ri = vol(Pi+1)/vol(Pi ) ∈ [r, r + δ], with high probability.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-39-2048.jpg)
![Annealing Schedule
How we compute the sequence of bodies
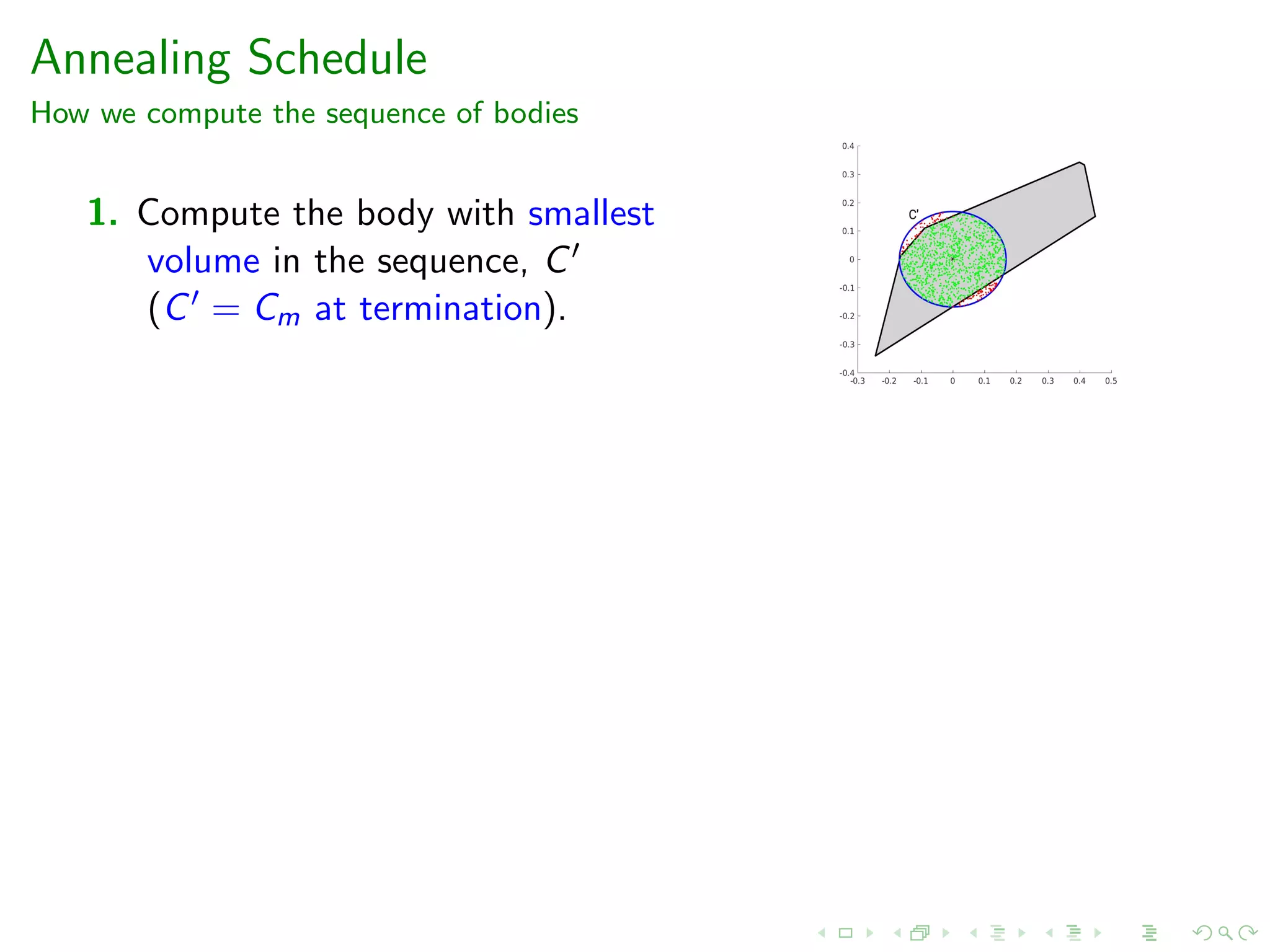
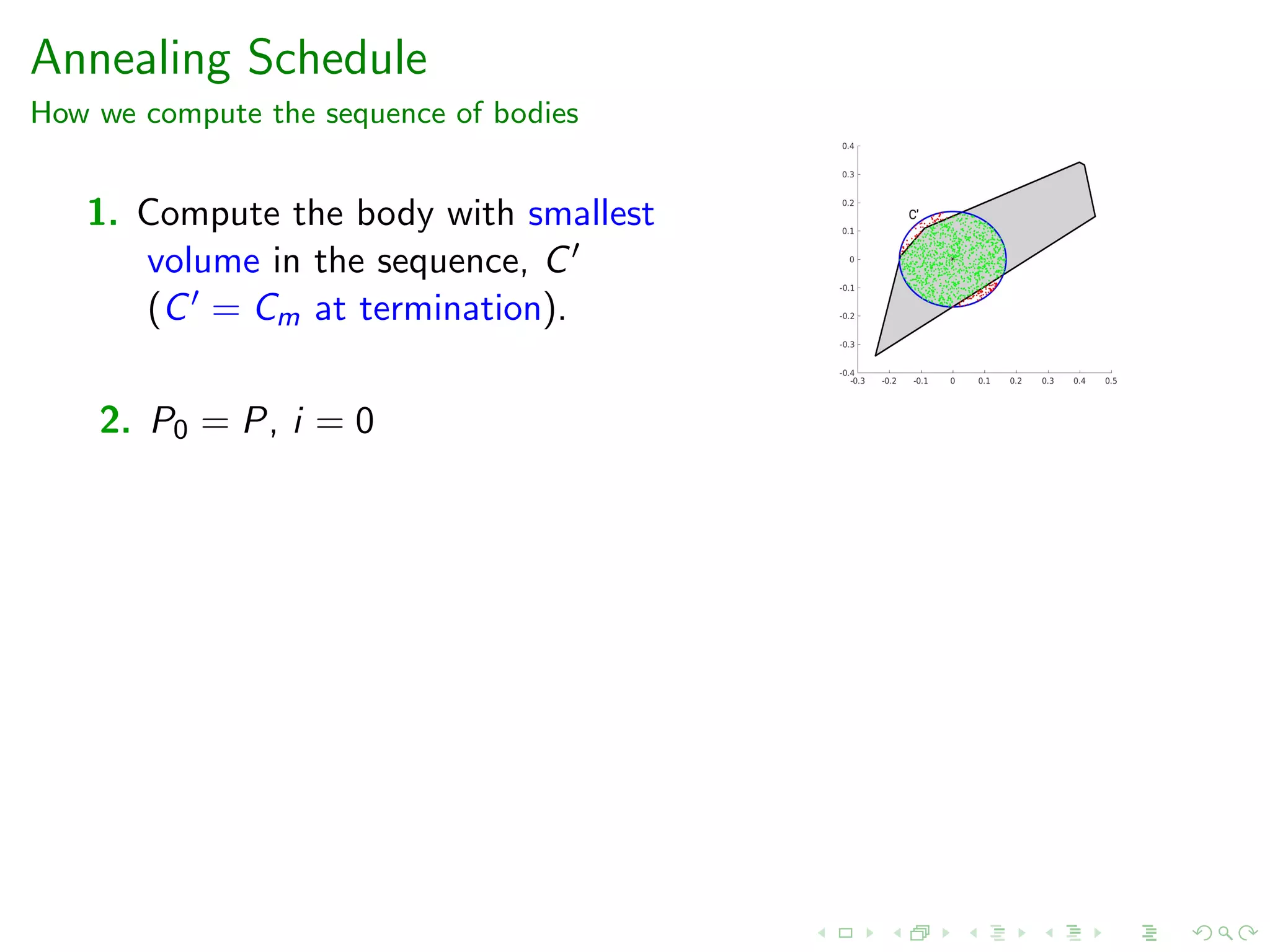
1. Compute the body with smallest
volume in the sequence, C
(C = Cm at termination).
2. P0 = P, i = 0
3. if vol(C ∩ P)/vol(Pi ) ≥ r set m = i + 1, Cm = C stop
otherwise construct Pi+1 s.t. vol(Pi+1)/vol(Pi ) ∈ [r, r + δ].
Check stopping criterion Construct Pi+1](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-42-2048.jpg)
![Annealing Schedule
How we compute the sequence of bodies
1. Compute the body with smallest
volume in the sequence, C
(C = Cm at termination).
2. P0 = P, i = 0
3. if vol(C ∩ P)/vol(Pi ) ≥ r set m = i + 1, Cm = C stop
otherwise construct Pi+1 s.t. vol(Pi+1)/vol(Pi ) ∈ [r, r + δ].
Check stopping criterion Construct Pi+1
4. i = i + 1, return to step 3.](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-43-2048.jpg)
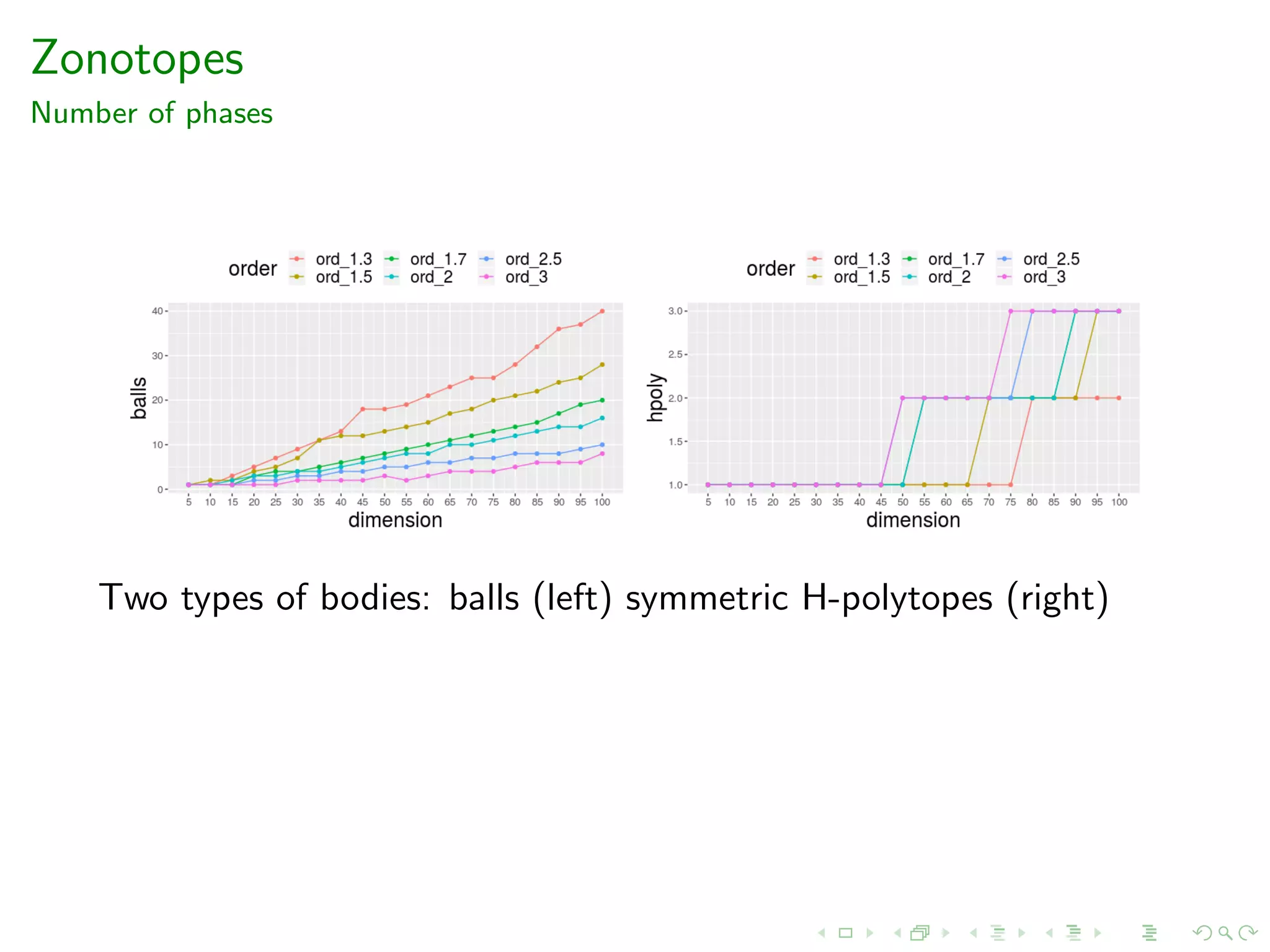
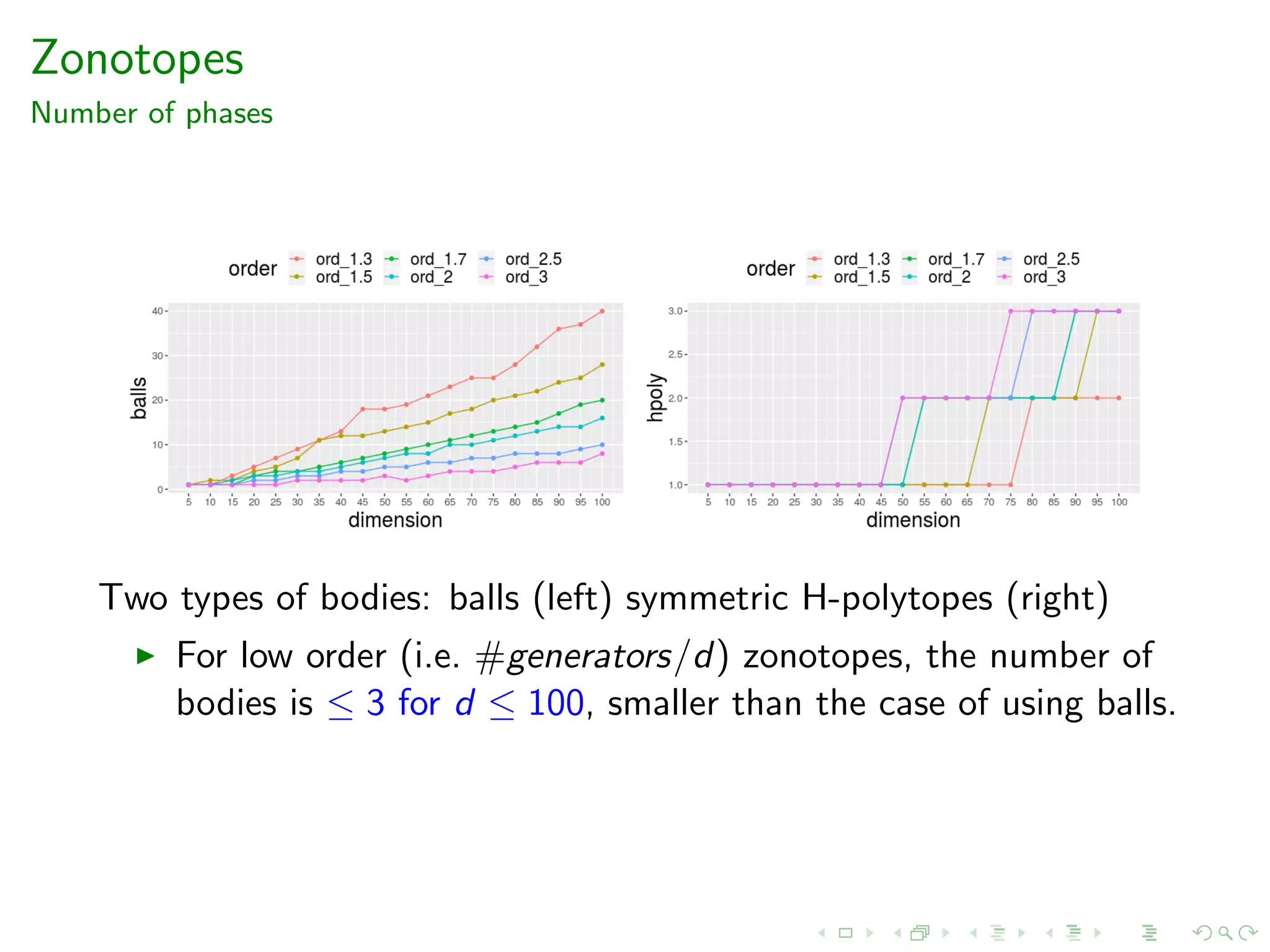
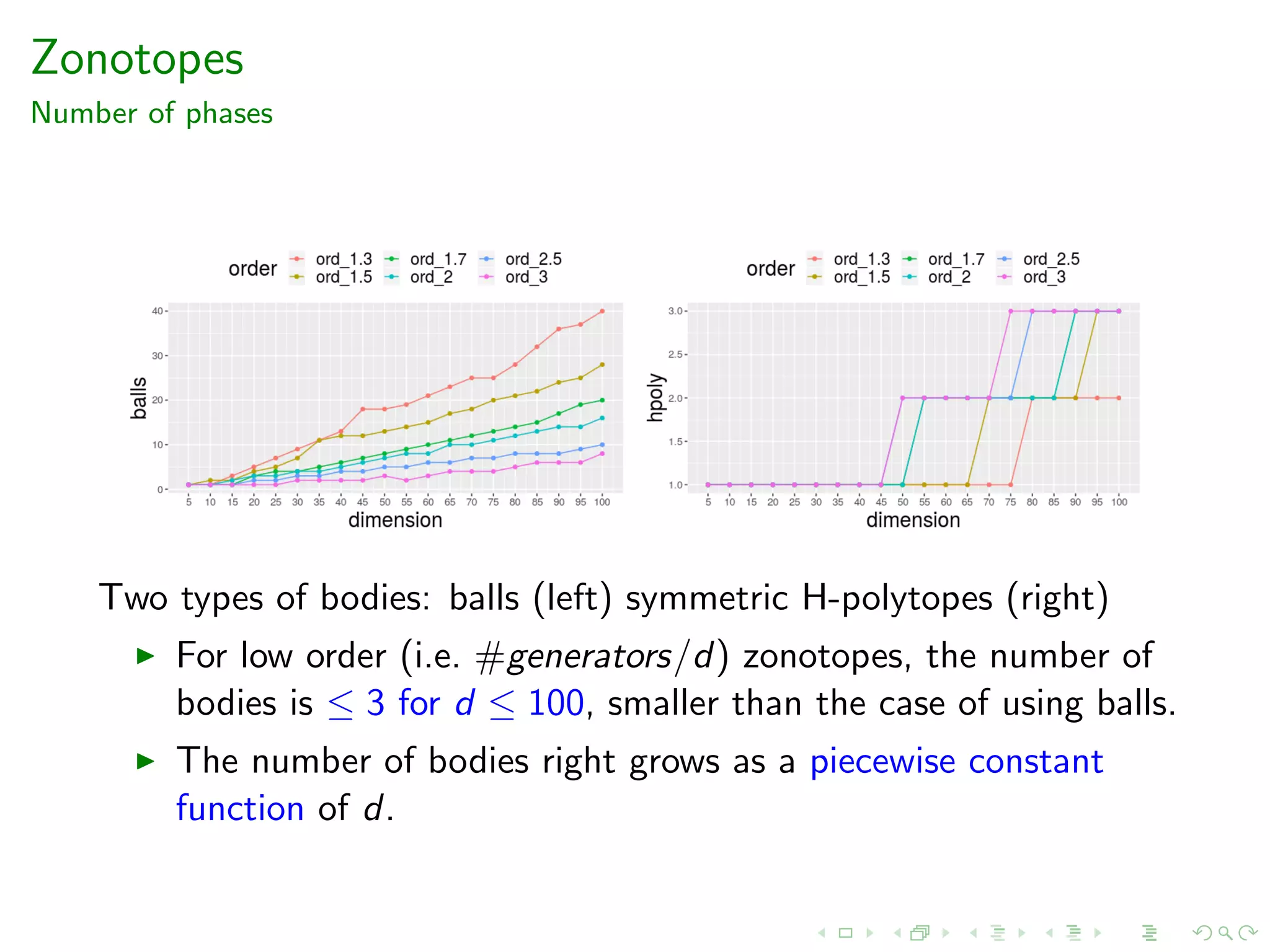
![Zonotopes
Number of phases
We use the generators of the zonotope P in order to define a
centrally symmetric H-polytope that is a ”good fit” to P.
In both figures vol(C ∩ P)/vol(C ) ∈ [0.8, 0.85].](https://image.slidesharecdn.com/acac19-200326204311/75/14th-Athens-Colloquium-on-Algorithms-and-Complexity-ACAC19-45-2048.jpg)