TeoremaKennedyCentros
•Download as DOCX, PDF•
2 likes•15,661 views

Teorema de Kennedy y localizacion de Centros Instantáneos de Rotacion

Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Similar to TeoremaKennedyCentros
Similar to TeoremaKennedyCentros (20)
Recently uploaded
Recently uploaded (20)
TeoremaKennedyCentros
- 1. UNIVERSIDAD FERMÍN TORO VICE-RECTORADO ACADÉMICO DECANATO DIRECCIÓN GENERAL S.A.I.A Ing. Pedro Luis Guédez Rojas TEOREMA DE KENNEDY
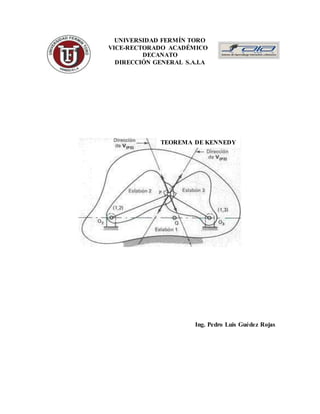
- 2. Teorema de Kennedy. El teorema de Kennedy o de los tres centros, dice que si tres cuerpos se encuentran en movimiento relativo, poseen en conjunto tres centros de rotación y los mismos se encuentran alineados. Para demostrarlo observemos los cuerpos (eslabones) 1, 2 y 3. Supongamos que el cuerpo 1 está en reposo. El centro instantáneo entre los cuerpos 1 y 2 es el punto fijo C12, que los une por acoplamiento rotoidal. El centro instantáneo entre los cuerpos 1 y 3 es el punto fijo C13. El contacto P entre los cuerpos 2 y 3 es variable y no es el centro de rotación entre 2 y 3, porque si así fuese, la velocidad del punto P como perteneciente a 3 que llamaríamos VP3 sería la misma que la velocidad de P como perteneciente a 2, que llamaremos VP2 , lo que no es cierto. La condición necesaria para que la velocidad de dos puntos en contacto y pertenecientes a los cuerpos 2 y 3, sea la misma es que P este en la recta que contiene a C12C13 denominada línea de centros. Este teorema es muy valioso en la consecución de centros instantáneos puesto que si se localizan dos de ellos, sabemos que hay otro más y relativo a las anteriores en la recta que los une. Número de Centros instantáneos y líneas de centros. El número de centros que posee un mecanismo depende exclusivamente del número de eslabones que lo forman. El número de centros instantáneos de un mecanismo que conste de e eslabones, se obtiene de la combinación de e elementos tomados dos a dos. En la formula si N es el número de centros instantáneos: N = Ce2 = e (e – 1) / 2 Por ejemplo si el mecanismo consta de 3 eslabones, el número de centros instantáneos es 3, si el número es 8 eslabones el número es 28. Esto es debido a que por cada eslabón existe un centro. El número de líneas a trazar, como máximo, contentiva de los centros donde hay eslabones e, es el resultado de la combinar e elementos tomados de 3 a 3. L = Ce3 = e (e – 1) (e – 2) / 6 De las formulas dadas sobre el número de centros instantáneos y el número de líneas en función del número d eslabones obtenemos el siguiente cuadro: Nº. Eslabones Nº. Centros Nº. Líneas. e N L 3 3 1 4 6 4 5 10 10
- 3. Localización de los centros en un mecanismo. En todo mecanismo hay centros cuya localización es inmediata por encontrarse en el punto de unión entre dos eslabones, sin embargo la localización de otros exige un poco de reflexión. Centros en el cuadrilátero articulado. Numerando las barras tales que A0B0 es la barra 1, la A0A es 2, la barra AB es 3 y la BB0 es 4, según sabemos el número de centros lo da: N = Ce2 = e (e – 1) / 3 = 4 * 3 / 2 = 6 De estos, hay 4 centros que se localizan por inspección y están en los vínculos de las barras. Estos 4 son C14 de las barras 1 y 4, C12 centro de las barras 1 y 2, C23 correspondiente a las barras 2 y 3 y C43 el centro de las barras 3 y 4. Quedan por localizar los centros correspondientes a las barras sin contacto 1- 3 y 2 – 4. Por el teorema de Kennedy, en cada recta que contiene 2 centros relacionados hay al menos otro más. En la recta que contiene los centros C34 y O14 (relacionados a través del eslabón 4) se encontrara un centro, que no puede ser otro que el correspondiente a las barras 1 y 3, de la misma manera, en la recta que contiene los centros A12 y B23 se encontrara otro centro que no puede ser otro que el correspondiente a las barras 1 y 3. El punto de corte de las rectas C34, O14 y A12 y B23 determina la posición del centro E13 de las barras 1 y 3. Un razonamiento análogo para las barra 2 y 4, conduce a la consecución del centro F24, este se encuentra forzosamente como punto de intersección de las rectas O14A12 y C34B23. Se debe observar por la notación empleada que el centro buscado está dentro de los subíndices no comunes; quiere ello decir que la recta que pasa por los puntos M58 (centro de las barra 5 y 8) 7 N59 (centro de las barras 5 y 9) pasa también por el punto P89 (centro de las barras 8 y 9). Volviendo al esquema recalcamos: Si E13 es el centro instantáneo de rotación de las barras 1 y 3, significa que el punto geométrico E, pensado como común a las barras 1 y 3, poseerá siempre la misma velocidad lineal para ambos sin importar la magnitud ni las direcciones de las velocidades angulares de la misma.
- 4. ACTIVIDAD PRÁCTICA 1.- Determine los centros Instantaneos. Solución
- 5. BIBLIOGRAFIA Mabie, Hamilton; Reinholtz, F. (2001). Mecanismos y Dinámica de Maquinarias. México. Limusa Wiley. Alberro, A. (2010). Teoría y Diseño de Máquinas y Mecanismos I. Cataluña. España. Universitat Politecnica de Catalunya. Recuperado de: https://williamvargas25.files.wordpress.com/2013/02/resumen_4barras.pdf Calzada, F (2012). Tecnología de Mecanismos. México D. F. México Instituto Politécnico Nacional. Recuperado de: https://victorve.files.wordpress.com/2012/02/tecnologia-de-mecanismos-1.pdf Mecanismos. Análisis de velocidades. file:///C:/Users/User/Downloads/3- VELOCIDAD.pdf Ramírez, A. (2005). Cinemática de las Maquinas. San Luis del Potosí. México. Universidad Autónoma de San Luis de Potosí. Recuperado de: http://www.ingenieria.uaslp.mx/Documents/Apuntes/Cinem%C3%A1tica%20de%20las% 20M%C3%A1quinas.pdf
- 6. AUTORIA Nombre completo: PEDRO LUIS GUÉDEZ ROJAS Grado de Instrucción: ING. MECÁNICO. Institución: IUTAJS Año de producción: 2017 Audiencia a la cual está INGENIERIA y TSU: MECANICA, dirigido el material: INDUSTRIAL, CIVIL. Asignatura (s) a la (s) que MECANISMOS, DINAMICA, puede servir este material: RESISTENCIA DE MATERIALES