ROMDAS Elite Survey Vehicle with Laser Crack Measurement System
•Download as PPTX, PDF•
1 like•1,463 views

RIMS Forum - 20 March 2013 Paul Hunter - Data Collection Ltd

Recommended
More Related Content
Viewers also liked
Viewers also liked (10)
Similar to ROMDAS Elite Survey Vehicle with Laser Crack Measurement System
Similar to ROMDAS Elite Survey Vehicle with Laser Crack Measurement System (16)
More from Simon Gough
More from Simon Gough (20)
Recently uploaded
Recently uploaded (20)
ROMDAS Elite Survey Vehicle with Laser Crack Measurement System
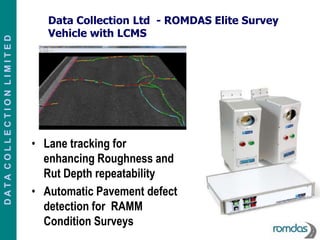
- 1. Data Collection Ltd - ROMDAS Elite Survey Vehicle with LCMS DATA COLLECTION LIMITED • Lane tracking for enhancing Roughness and Rut Depth repeatability • Automatic Pavement defect detection for RAMM Condition Surveys
- 2. Data Collection Ltd - ROMDAS Elite Survey Vehicle with LCMS DATA COLLECTION LIMITED
- 3. LCMS Principal of Operation DATA COLLECTION LIMITED • Invisible high speed scanning laser fires at pavement surface • Acquires full 4 m width profiles of a lane at normal traffic speed every 5 mm • Capture in both full daylight or in night time conditions • Automatic detection of a number of pavement defects
- 4. LCMS Data Output The following data are output from the LCMS: DATA COLLECTION LIMITED • Roughness - IRI in two adjustable wheelpaths • Cracking –length, width, depth • Rutting-depth, width, cross-sectional area, type • Macro-Texture-MPD in 5 lines or bands across the lane • Potholes – depth, area • Raveling Other Outputs: • JPEG imaging with Defect overlay • 3D imaging
- 5. Factors affecting Roughness Data Collection DATA COLLECTION LIMITED Variation of roughness data may be explained by a number of issues such as • Equipment related variation • Tracking – lateral wander – of vehicle during data collection • Distance and equipment calibration error • Operator errors • Location referencing errors (both of roughness data collection and defect records)
- 6. Example of the effects of Lane wander DATA COLLECTION LIMITED
- 7. Example of the effects of Lane wander DATA COLLECTION LIMITED LWP IRI value for section LWP IRI value for section 3.44 IRI 7.87 IRI 90 NAASRA 207 NAASRA
- 8. Lane Wander DATA COLLECTION LIMITED Results depend on the trajectory of the vehicle (subject to variation based on driver’s ability)
- 9. LCMS Lane Tracking System DATA COLLECTION LIMITED Classic system: Results LCMS system: Erratic trajectory of depend on the trajectory of the vehicle will still result in the vehicle (subject to straight elevation profiles, and the variation based on driver’s same profiles in subsequent surveys ability)
- 10. Pavemetrics Data for Effect of Lane Tracking DATA COLLECTION LIMITED
- 11. Rut Depth Measurement with Scanning Laser DATA COLLECTION LIMITED The accuracy of rutting measurements depends upon two operational factors: • Vehicle position on the road (lateral placement); and, • The ability to locate the high and low points in the profile measured. Transfund report - Harmonising Automated Rut Depth Measurements
- 12. RAMM Condition Rating DATA COLLECTION LIMITED • on a portion of the network not 100%. • rating can be somewhat subjective and reliant on the interpretation of the inspector. • safety aspects of having raters on the road or road edge.
- 13. Crack Image with Defect Overlay DATA COLLECTION LIMITED
- 14. Pavemetrics Crack Detection Repeatability Data – Australia DATA COLLECTION LIMITED
- 15. RAMM Condition Rating Attributes able to be measured by LCMS DATA COLLECTION LIMITED • Rutting • Shoving • Cracking – Alligator cracks • Cracking - Longitudinal / Transverse • Cracking - Joint Cracks • Potholes
- 16. ROMDAS Elite with LCMS System DATA COLLECTION LIMITED •By using the Lane tracking technology all datasets are unaffected by the vehicle wander during survey. •Great potential to use the automatic defect detection to supplement RAMM Condition rating surveys
Editor's Notes
- We at Data Collection ltd have recently set up this survey vehicle with a ROMDAS data collection systemintegrated with a full 3d laser scanning system using the Laser Crack measurement system or LCMS has it is commonly called.Now don't let the crack measurement part of the name make you think that it only measures cracks. As you will see this unit measures practically all the data currently collected here in the High Speed Data surveys as well as a host of other data sets. The unit we have also includes the roughness upgrade with accelerometers attached to each Laser scanning unit. This vehicle is currently doing the High Speed Data surveys for a south island council measuring roughness, rutting and macrotexture . All of these data sets are being measured from the LCMS unit and not from any of the traditionally used single point Laser Profilers.
- Now I just want to explain a little more in depth on some aspects of the LCMS measuremntsNow one of the great benefits to the LCMS technology is the pavement images that we get. The system produce images from the laser data and it automatically puts key information laid right on top of the image. Here the purple line is where it sees the lane marking and it puts the yellow line where it has measured the longitudinal wheelpaths for roughness.Now because the LMCS system has measured the whole lane surface we can actually measure the roughness along any longitudinal line in the full 4 m scan width. This is quite unique because previously we have only had the 2 roughness values from single point lasers measured at the time of the survey. And in fact we had no actual idea where they had measured except to trust that the driver had done his best to drive in the wheelpath.With the LCMS I can process again with a different wheelpath width or I can simply move the path of the vehicle across the lane like I have done here in the image on the right. I think this is great -never before have we had a system were the data for the whole pavement surface is collected and we can do such detailed analysis.
- Now no surprise - moving the driving line by just 25 cm so that the LWP crossed the service cover has more than doubled the roughness value. However it is interesting to be able to quantify the difference so easilyNow of course this is exactly why we mark events that will affect roughness like the service covers in RAMM.However I would suggest that there are many patches of localised roughness on our networks that often wont necessarily be marked by events .I used this example only to show how a small shift in the path driven year by year could give different results for some sections.Although the actual pavement has had little or no change, all that is changed is just the driving line of the survey vehicle - which we have never even been able to tell where that line was with the traditional single point laser systems.
- Here is an example from the manufacture. The driver in this test was asked to purposefully wander along the lane during the test. The result was processed with Lane tracking on and off You can see where on the same site the difference in results has been quite dramatic even on this quite smooth roadthere was up to 10 % difference in one of the wheel paths
- what about other data sets. What about rut depth measurements. According to one report I looked at- The accuracy of a profilometer measurement for rutting mainly depends upon these twooperational factors: And there we see again - it is the vehicle lateral placement again being highlighted as a significant factor to the accuracy of this particular measurement. Now with the LCMS scanning laser both of these issues here have been addressed.With the LCMS in addition to the lane tracking the rutting scan is also constrained by kerb and gutter detection to ensure that there is no false detection of rut depth. With the full road scan of up to 4 m the ability of the LCMS to very accurately constrain the measured width to the lane is obviously very important.Of course by scanning over 4000 points across the lane in each scan the high and low points of the rut cannot be missed as they can be with a traditional multipoint laser system The Lane tracking features obviously apply to all the collected data sets and not just the roughness and rutting measurements that I have used as examples. Therefore by using this feature we can have more confidence in the accuracy of the data submitted year to year in the High speed data surveys.
- Currently the RAMM Condition rating is being done manually and it would be fair to say that there are some constraints to these surveys such as those shown here.We see another key benefit of the LCMS would be to supplement the current RAMM condition ratings with a high speed survey alternative for some of the key carriageway measurements.The LCMS can automatically detect and give a quantitative measurement of many of the pavement defects currently looked for in the RAMM Condition rating surveys
- This type of High Speed survey would be able to give a database giving various measurements such as crack length and width As well we can provide the LCMS images with overlays of the defects like the one shown. The overlays are also colour coded giving severity levels etc.
- The detection of surface defects like cracks and potholes by a system like the LCMS has matured significantly.This technology now offers a very accurate and repeatable way of measuring these defects from a High speed data collection vehicle. Here is some data from the manufacturer of the LCMS showing crack detection repeatability on a chipseal surface from data collected in Australia. This may need some further validation in New Zealand conditions but we think it is a very promising option that should be explored further.
- The LCMS currently would be capable of measuring these defects listed here in a high speed survey If these defects were automatically collected in a High Speed data survey as a supplement to the RAMM Condition rating surveys I am sure that there are significant efficiencies, accuracies and safety advantages that could and would be gained.
- So in conclusion I hope I have shown you how this new technology not only has the potential to increase the accuracy of the existing high speed data surveys but also shown the possibility of other ways it could be utilised to supplement and enhance the potential of other surveys currently being conducted in NZ.If time allows (and is appropriate) (Now as I have a bit of time left I hopefully wetting someone's appetite to the ease at which all sorts of research could be done with this system as it is so much easier with this instrument to rerun many different variables and variations on one dataset and with the access to information across the whole pavement surface I think would make for some quite interesting research possibilities. )We are excited about the potential for this system and please remember that I have only been able to touch briefly on just a couple of the benefits of the LCMS scanning technology in this presentation so if you would like to know more about this exciting technology please come and see either Diana or myself at the Data Collection Ltd stand. Thankyou