Beginners Guide to TikTok for Search - Rachel Pearson - We are Tilt __ Bright...
UFO EXPO poster 2014Update
1. Capstone Design Project: Team UFO
Russ College of Engineering and Technology
School of Electrical Engineering and Computer Science (EECS)
Adam Schultz
Adam Farwick
Huafeng Liu
Matt Levine
Adviser : Dr. Jim Zhu
Project Goal:
What is the UFO?
The UFO project has been an ongoing senior design project with the
purpose of implementing, testing, and verifying the operation of an
autopilot system known as trajectory linearization control (TLC). While
the TLC autopilot has been verified through simulations, this project is
tasked with real-world verification in a tangible object. This development
of a navigation and guidance system for a field deploy-able unmanned
aerial vehicle (UAV) capable of vertical takeoff and landing (VTOL) will
occur on a tricopter.
How does it work?
The TLC autopilot algorithms are written and then programmed to the
on-board flight computer. Upon initialization of the program, a platform
on the hardware-in-the-loop (HITL) testing stand directly supporting the
UFO will drop down to simulate the ground effect of vertical take-off.
With increasing thrust from the motors, the UFO will create a force which
is read by the JR3 load cell on the HITL platform. This translational data
will be sent back to the UFO. The HiQ can then use this feedback to adjust
and correct for any undesired changes.
Background:
When the 2013-2014 design team began work on
The UFO, there were several underlying problems that
were holding back completion of the final flight testing.
The frame designed for the UFO in 2006 had undergone
numerous cosmetic and structural changes over the years to
support additional subsystems and modifications. Upon testing
the flight capabilities in 2013, it was determined that the frame
was not rigid enough for further testing. When the thrust of the
three main propellers reached about 90% of its maximum, the
frame would begin to vibrate and distort, and soon these
oscillations would cause loss of control of the UFO.
Improvements:
In order to continue progress on the UFO, it was decided that a new frame
would have to be designed and fabricated to support the latest needs of
the project. The new frame was designed to carry an on-board flight
computer, with space for multiple sensors and motors. For this, a Y-shape
frame was chosen, with the three main motors being equally spaced from
one another. An additional arm was installed to support two fans to control
yaw motion for the future development of 6 degrees of freedom. To meet
weight requirements, the material chosen for construction was carbon
fiber, with aluminum motor mounts where needed.
Future Development:
With the frame fabrication completed, the team can now focus on other issues
hindering flight status. An issue that will need to be resolved is a timeout
encountered when transmitting data to the UFO computer via RS-232 wireless
communication protocols. Furthermore, tuning will be underway soon to calibrate
the UFO for the new frame.
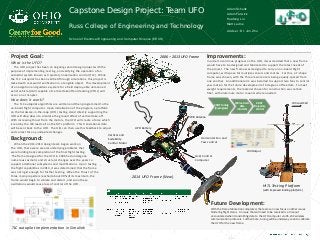
TLC autopilot implementation in Simulink
2006 – 2013 UFO Frame
2014 UFO Frame (New)
HITL Testing Platform
(with improved landing platform)
HI-Q Control
Computer
Horizontal Fan and
Yaw control
Vertical and
Suitability
Control Motor
LIPO Battery
JR3 Load Cell
3 DOF Tuning
(in progress)
JR3 load cell
data
into HI-Q
6 DOF
Trajectory
Control
JR3 Output
Wifi Antenna