LATESTROBOTICS PROJECTS:Unmanned ground combat vehicle (tank robot)
•Download as DOC, PDF•
0 likes•461 views

PROJECTS DETAILS, thanks R.ASHOK KUMAR MAASTECH 89. RANGARAJAPURAM MAIN ROAD(NEAR SBI BANK) KODAMBAKKAM CHENNAI-600024 PH:044-24844676 ASHOK KUMAR-098402 34766 PL VISIT http://www.maastechindia.com

Recommended
Recommended
More Related Content
More from ASHOKKUMAR RAMAR
More from ASHOKKUMAR RAMAR (20)
Recently uploaded
Recently uploaded (20)
LATESTROBOTICS PROJECTS:Unmanned ground combat vehicle (tank robot)
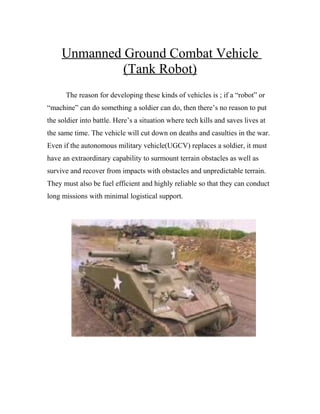
- 1. Unmanned Ground Combat Vehicle (Tank Robot) The reason for developing these kinds of vehicles is ; if a “robot” or “machine” can do something a soldier can do, then there’s no reason to put the soldier into battle. Here’s a situation where tech kills and saves lives at the same time. The vehicle will cut down on deaths and casulties in the war. Even if the autonomous military vehicle(UGCV) replaces a soldier, it must have an extraordinary capability to surmount terrain obstacles as well as survive and recover from impacts with obstacles and unpredictable terrain. They must also be fuel efficient and highly reliable so that they can conduct long missions with minimal logistical support.
- 2. Operation: This (UGCV) can be programmed to move to a particular Distance and be able to shoot at a particular target as per the co-ordinates given by the control base. The complete operation is controlled by using a PIC Microcontroller (PIC 16F877). The commands from the base are received through a RF Wireless Receiver which operates in 433.92 MHZ. After Receiving a command, it is decoded first (Direction changing command or Firing command) and the actions are taken accordingly. For firing command the Pointer is first positioned at the target and then initiating the firing sequence. All these movements are controlled using a DC stepper Motor. Moreover AI (Artificial Intelligence) is also incorporated in the vehicle. The vehicle can deviate the path if it finds any intruder or obstacles in its path. It can able to classify the obstacle as a human or just obstacle by employing a PIR (Passive Infrared Sensor).
- 3. Block Diagram: Wireless RF Transmitter Wireless RF PIR Receiver Sensor Stepper Motor For 360 Deg Pointer Power Embedded PIC Movement (Circular) Supply Microcontroller Stepper Motor Controller Stepper Motor For 180 Deg Pointer Movement (Vertical)