Grafcet e programação em Ladder de sistemas robóticos
•
4 gostaram•707 visualizações

Este documento apresenta 5 exercícios de um curso de Robótica sobre grafcets e programação em Ladder de sistemas de controle de motores CC, cilindros e robôs. Os exercícios envolvem fazer grafcets e programas em Ladder para controlar motores CC e movimentos de cilindros baseados em entradas de botões e sensores, além de automatizar o movimento de peças em esteiras e robôs em uma linha de produção. Diagramas Ladder e referências bibliográficas são fornecidos.

Recomendados
Mais conteúdo relacionado
Mais de Jim Naturesa
Mais de Jim Naturesa (20)
Último
Último (20)
Grafcet e programação em Ladder de sistemas robóticos
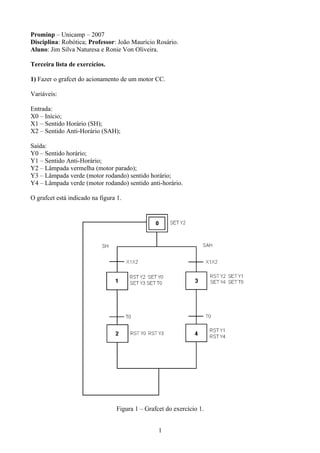
- 1. Prominp – Unicamp – 2007 Disciplina: Robótica; Professor: João Maurício Rosário. Aluno: Jim Silva Naturesa e Ronie Von Oliveira. Terceira lista de exercícios. 1) Fazer o grafcet do acionamento de um motor CC. Variáveis: Entrada: X0 – Início; X1 – Sentido Horário (SH); X2 – Sentido Anti-Horário (SAH); Saída: Y0 – Sentido horário; Y1 – Sentido Anti-Horário; Y2 – Lâmpada vermelha (motor parado); Y3 – Lâmpada verde (motor rodando) sentido horário; Y4 – Lâmpada verde (motor rodando) sentido anti-horário. O grafcet está indicado na figura 1. Figura 1 – Grafcet do exercício 1. 1
- 2. 2) Fazer o grafcet e programa em Ladder do acionamento de um motor CC. Problema (situações): 2.1) Motor + Parada + Motor AH (Sentido Anti-Horário); 2.2) Motor H (Sentido Horário); 2.3) Motor AH; 2.4) Motor H + Parada + Motor AH – 5 vezes. 3) Idem anterior com um botão X5 de Reset e volta ao início. O grafcet do segundo em conjunto com o terceiro exercício está mostrado na figura 2. As variáveis são: Entradas: X1 – Motor H + Parada + Motor AH; X2 – H; X3 – AH; X4 - Motor H + Parada + Motor AH – 5 vezes; X5 – Botão Reset Saídas: Y1 – Sentido Horário (H); Y2 – Sentido Anti-Horário (AH); Variáveis de controle: T1 – Temporizador 1; T2 – Temporizador 2; T3 – Temporizador 3; CONT – Contador. 2
- 3. Figura 2 – Grafcet do exercício 2 e 3. O diagrama Ladder está indicado abaixo. 3
- 4. 4
- 5. 4) Idem ao exercício 2 mas utilizando um cilindro. Problema (situações): 4.1) Cilindro Avança + Pára + Recua; 4.2) Fazer 5 vezes o movimento; 4.3) Aperta X5 o motor pára (botão de RESET). 5
- 6. As variáveis são: Entrada: X1 – Cilindro avança + Parada + Cilindro recua; X2 - Cilindro avança + Parada + Cilindro recua – 5 vezes; X3 – Botão Reset; Saídas: Y1 – Avança cilindro; Y2 – Recua cilindro; Variáveis de controle: T1 – Temporizador; CONT – Contador. O grafcet está indicado na figura 3. Figura 3 – Grafcet do exercício 4 O diagrama Ladder está indicado a seguir. 6
- 7. 7
- 8. 5) Automatizar o sistema abaixo (figura 4). Figura 4 – Sistema robotizado. As variáveis são: Esteira 1 X2 – SP1 (Sensor de Posição); X3 – SP2; Y0 – MSH – Motor no Sentido Horário. Esteira 2 X4 – SP3 (Sensor de Posição); X5- SP4; Y1 – MSAH - Motor no Sentido Anti-Horário. 8
- 9. Robô 1 – R1 Tarefas Y2 Y3 Posição inicial 0 0 Posição esteira 1 0 1 Posição Buffer 1 1 1 Posição esteira 2 1 0 Robô 2 – R2 Tarefas Y4 Y5 Posição inicial 0 0 Posição esteira 1 0 1 Posição Buffer 2 1 1 Posição esteira 2 1 0 X6 – Confirma R1 (Robô 1); X7 – Confirma R2 (Robô 2). A figura 5 apresenta o grafcet do sistema robotizado. 9
- 10. Figura 5 – Grafcet do exercício 5. O diagrama Ladder está indicado a seguir. 10
- 11. 11
- 12. Referências Centinkunt, S. Mechatronics. Jonh Wiley & Sons. 2007. Rosário, J. Princípios de Mecatrônica. Editora Pearson. 2005. Silveira, P. & Santos, W. Automação e Controle Discreto. Editora Érica. 2004. 12