Sistema experto/soporte para la optimización de líneas ferroviaria, Juan pavón muñoz
•
3 likes•1,255 views

Este documento presenta un resumen del estado del arte sobre la electrificación ferroviaria. Se describe la arquitectura de la electrificación, incluyendo el sistema de alimentación, subestaciones de tracción, catenaria, transformadores y modos de funcionamiento. También se explican conceptos relacionados con el material rodante, como la resistencia al avance, en curva y por gravedad. Además, se detallan las condiciones de diseño como tensiones en la catenaria, corrientes, potencia en transformadores y perturbaciones. Finalmente, se introducen concept

Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Sistema experto/soporte para la optimización de líneas ferroviaria, Juan pavón muñoz
Similar to Sistema experto/soporte para la optimización de líneas ferroviaria, Juan pavón muñoz (20)
More from Juan Pavón
More from Juan Pavón (6)
Sistema experto/soporte para la optimización de líneas ferroviaria, Juan pavón muñoz
- 1. Proyecto fin de máster, Organización Industrial y Gestión de Empresas 1
- 2. 2
- 3. Índice ESTADO DEL ARTE 1 RESUMEN ........................................................................................................................... 8 2 PRÓLOGO ........................................................................................................................ 10 3 INTRODUCCIÓN AL ESTADO DEL ARTE .................................................................. 12 3.1 NORMATIVA Y CRITERIOS DE DISEÑO .................................................................. 12 3.2 DATOS NECESARIOS PARA EL MODELADO ........................................................... 12 4 ARQUITECTURA DE LA ELECTRIFICACIÓN FERROVIARIA ................................ 13 4.1 SISTEMA DE ALIMENTACIÓN ............................................................................... 13 4.2 SUBESTACIONES DE TRACCIÓN ............................................................................ 14 4.3 CATENARIA ......................................................................................................... 14 4.4 TRANSFORMADORES Y AUTOTRANSFORMADORES ............................................. 15 4.5 ZONAS NEUTRAS................................................................................................. 15 4.6 MODOS DE FUNCIONAMIENTO ........................................................................... 16 5 MATERIAL RODANTE ................................................................................................... 17 5.1 RESISTENCIA AL AVANCE ..................................................................................... 17 5.2 RESISTENCIA EN CURVA ...................................................................................... 18 5.3 RESISTENCIA POR GRAVEDAD ............................................................................. 19 5.4 FUERZAS DE TRACCIÓN Y/O FRENADO................................................................. 19 5.5 MASA DE LA ECUACIÓN DE LA DINÁMICA ............................................................ 20 5.6 ECUACIÓN DE LA DINÁMICA DEL MATERIAL RODANTE ......................................... 20 5.7 TABLA-RESUMEN DE VARIABLES.......................................................................... 21 6 CONDICIONES DE DISEÑO .......................................................................................... 22 6.1 TENSIONES EN LA CATENARIA ............................................................................. 22 6.2 CORRIENTES DE LA CATENARIA ........................................................................... 23 6.3 POTENCIA EN TRANSFORMADORES Y AUTOTRANSFORMADORES ........................ 23 6.3.1 Media aritmética .................................................................................................................. 24 6.3.2 Media cuadrática .................................................................................................................. 24 6.4 DESEQUILIBRIOS EN LA RED TRIFÁSICA ................................................................ 24 6.5 PERTURBACIONES ............................................................................................... 25 6.6 TENSIONES DE CONTACTO Y PASO....................................................................... 26 6.7 TABLA-RESUMEN DE VARIABLES.......................................................................... 28 3
- 4. 7 OPTIMIZACIÓN DE LA ELECTRIFICACIÓN FERROVIARIA .................................. 31 7.1 CONDICIONES DE DISEÑO.................................................................................... 31 7.2 COSTES DE LA ELECTRIFICACIÓN .......................................................................... 31 7.3 ALTERNATIVAS DE ALIMENTACIÓN DESDE LA RED TRIFÁSICA ............................... 32 7.4 SISTEMA DE ALIMENTACIÓN ............................................................................... 32 7.5 PROCEDIMIENTO DE DISEÑO ............................................................................... 33 7.6 REPOSITORIO DE CATENARIAS............................................................................. 33 7.7 POSICIÓN RELATIVA DE LOS CONDUCTORES ........................................................ 34 7.8 DISTRIBUCIÓN DE LOS AUTOTRANSFORMADORES ............................................... 35 7.9 LOCALIZACIÓN DE LOS AUTOTRANSFORMADORES .............................................. 35 7.10 RELACIÓN DE TRANSFORMACIÓN EMPLEADA ...................................................... 36 7.11 FORMULACIÓN DEL PROBLEMA DE OPTIMIZACIÓN ............................................. 36 7.11.1 Función objetivo ............................................................................................................... 37 7.11.2 Restricciones .................................................................................................................... 37 7.12 TABLA-RESUMEN DE VARIABLES.......................................................................... 41 INVESTIGACIÓN Y DESARROLLO 8 INTRODUCCIÓN ............................................................................................................. 43 9 DATOS DE ENTRADA .................................................................................................... 45 9.1 OROGRAFÍA DEL TRAYECTO................................................................................. 45 9.2 ITINERARIO ......................................................................................................... 45 9.3 MATERIAL RODANTE ........................................................................................... 45 9.4 CATENARIA ......................................................................................................... 45 9.5 ELECTRIFICACIÓN ................................................................................................ 46 10 TRATAMIENTO DE DATOS .......................................................................................... 47 10.1 CAMBIO DE UNIDADES DE LOS PARÁMETROS DE ENTRADA ................................. 47 10.2 SIMPLIFICACIÓN DEL NÚMERO DE TRAMOS......................................................... 47 11 CINEMÁTICA DEL MATERIAL RODANTE................................................................. 48 11.1 RESTRICCIONES DE RODAJE, VELOCIDAD Y POTENCIA MÁXIMA............................ 48 11.1.1 Restricciones de velocidad (impuestas por la vía) ........................................................... 48 11.1.2 Restricciones de potencia (impuestas por el material rodante) ...................................... 48 11.2 LIMITACIONES EN ACELERACIÓN Y DECELERACIÓN .............................................. 49 11.3 ESTACIONES........................................................................................................ 49 4
- 5. 11.4 VELOCIDAD MÁXIMA EN CURVA ......................................................................... 50 11.4.1 Ecuaciones ........................................................................................................................ 50 11.5 CORRECCIONES SOBRE EL PERFIL CINEMÁTICO .................................................... 51 11.5.1 Casos posibles en la dinámica del tren ............................................................................. 52 11.6 TABLA-RESUMEN DE LAS VARIABLES ................................................................... 53 12 DINÁMICA DEL MATERIAL RODANTE ..................................................................... 55 12.1 RESISTENCIA AL AVANCE ..................................................................................... 55 12.1.1 Resistencia al avance en línea recta ................................................................................. 55 12.1.2 Resistencia al avance en curva ......................................................................................... 57 12.1.3 Resistencia debida a la gravedad ..................................................................................... 57 12.1.4 Esfuerzos de tracción y frenado ....................................................................................... 57 12.1.5 Ecuación del movimiento del material rodante ............................................................... 58 12.1.6 Carga máxima ................................................................................................................... 59 12.2 OTRAS EXPRESIONES Y FÓRMULAS ...................................................................... 59 12.2.1 Resistencia mecánica ....................................................................................................... 59 12.2.2 Resistencia aerodinámica ................................................................................................. 60 12.2.3 Aproximación de la velocidad límite admitida en curvas ................................................. 60 12.2.4 Adherencia ....................................................................................................................... 60 12.2.5 Arranque en deriva .......................................................................................................... 60 12.3 TABLA-RESUMEN DE VARIABLES.......................................................................... 60 13 PARÁMETROS DE LA CATENARIA, CAÍDA DE TENSIÓN Y PÉRDIDAS ELÉCTRICAS 64 13.1 OBTENCIÓN DE LA MATRIZ DE IMPEDANCIAS DIAGONAL ..................................... 64 13.1.1 Impedancias en serie........................................................................................................ 64 13.1.2 Admitancias en paralelo ................................................................................................... 65 13.1.3 Matriz de impedancias global .......................................................................................... 65 13.1.4 Independencia matemática entre conductores ............................................................... 65 13.2 CAÍDA DE TENSIÓN ............................................................................................. 66 13.3 PÉRDIDAS ELÉCTRICAS ........................................................................................ 66 13.4 TABLA-RESUMEN DE VARIABLES.......................................................................... 66 14 RESOLUCIÓN DE LA ELECTRIFICACIÓN .................................................................. 68 14.1 ELECTRIFICACIÓN CA 1X25 KV, CONFIGURACIÓN VÍA ÚNICA ................................ 68 14.2 ELECTRIFICACIÓN CA 1X25 KV, CONFIGURACIÓN DOBLE VÍA ................................ 69 14.3 ELECTRIFICACIÓN EN CA 2X25 KV, CONFIGURACIÓN VÍA ÚNICA ........................... 74 14.4 ELECTRIFICACIÓN EN CA 2X25 KV, CONFIGURACIÓN EN DOBLE VÍA ...................... 75 14.5 ELECTRIFICACIÓN EN CC, CONFIGURACIÓN DE VÍA ÚNICA .................................... 76 14.6 ELECTRIFICACIÓN EN CC, CONFIGURACIÓN DOBLE VÍA ......................................... 76 14.7 TABLA-RESUMEN DE VARIABLES.......................................................................... 78 15 INTRODUCCIÓN A LA OPTIMIZACIÓN DE LA ELECTRIFICACIÓN FERROVIARIA ......................................................................................................................... 81 5
- 6. 16 ELECCIÓN DEL MÉTODO DE OPTIMIZACIÓN ........................................................ 84 16.1 RESOLUCIÓN DE PROBLEMAS DE OPTIMIZACIÓN ................................................. 84 16.1.1 Problemas combinatorios ................................................................................................ 84 16.1.2 Técnicas para la resolución de problemas combinatorios ............................................... 85 16.2 VENTAJAS Y DESVENTAJAS DE LOS MÉTODOS HEURÍTICOS .................................. 86 16.2.1 Ventajas ............................................................................................................................ 86 16.2.2 Desventajas ...................................................................................................................... 86 16.3 MÉTODO ALGORITMICO SELECCIONADO PARA LA RESOLUCIÓN DE LA OPTIMIZACIÓN .............................................................................................................. 86 OPTIMIZADOR 17 INTRODUCCIÓN AL OPTIMIZADOR .......................................................................... 87 17.1 SIMILITUD CON LOS SISTEMAS EXPERTOS ............................................................ 87 17.2 SIMILITUD CON LOS MÉTODOS DE BÚSUQEDA POR ENTORNO ............................. 87 18 ARQUITECTURA DEL OPTIMIZADOR....................................................................... 89 18.1 COMPONENTES DEL OPTIMIZADOR ..................................................................... 89 18.1.1 Memoria de datos (color azul) ......................................................................................... 89 18.1.2 Motor de cálculo (color rojo) ........................................................................................... 90 18.1.3 Inteligencia basada en sistemas expertos (color verde) .................................................. 90 18.2 MÉTODO DE OPERACIÓN DEL OPTIMIZADOR ....................................................... 90 19 SUBMÓDULO DE COMPARACIÓN CON LA MEMORIA DE DATOS Y SOLUCIÓN INCIAL 94 19.1 ALGORITMO PARA LA DETERMINACIÓN DE LOS SUBLOQUES DE POTENCIA .......... 94 19.2 ALGORITMO PARA DETERMINAR LA DENSIDAD DE POTENCIA DE LOS SUBLOQUES 95 19.3 CLASIFICACIÓN DE LOS SUBTRAMOS EN NIVELES DE DENSIDAD ........................... 96 19.4 ALGORITMO PARA LA COMPRACIÓN DE LOS PERFILES DINÁMICO Y DETERMINACIÓN DE NSE ............................................................................................... 97 19.5 TABLA-RESUMEN DE VARIABLES.......................................................................... 99 20 SUBMÓDULO DE VERIFICACIÓN DEL SUBESPACIO DE SOLUCIONES ........... 102 20.1 ALGORITMO ..................................................................................................... 102 20.2 TABLA-RESUMEN DE VARIABLES........................................................................ 104 21 CAMBIO DE CONFIGURACIÓN BÁSICA FACTIBLE/VECINDAD ........................ 106 21.1 EMPLAZAMIENTO DE LAS SUBESTACIONES DE TRACCIÓN, PROBLEMA 1............. 106 21.1.1 Función objetivo ............................................................................................................. 106 21.1.2 Restricciones .................................................................................................................. 106 6
- 7. 21.1.3 Tabla-resumen de variables del problema 1 .................................................................. 107 21.2 OPTIMIZACIÓN DE LA LONGITUD DE LOS SUBSECTORES, PROBLEMA 2 ............... 108 21.2.1 Función objetivo ............................................................................................................. 108 21.2.2 Restricciones .................................................................................................................. 108 21.2.3 Tabla-resumen de variables del problema 2 .................................................................. 109 21.3 OPTIMIZACIÓN DE LA ASIGNACIÓN DE CATENARIAS A LOS SUBSECTORES DE LAS SUBESTACIONES DE TRACCIÓN, PROBLEMA 3 ............................................................... 110 21.3.1 Función objetivo ............................................................................................................. 110 21.3.2 Restricciones .................................................................................................................. 110 21.3.3 Tabla-resumen de variables del problema 3 .................................................................. 110 22 SUBMÓDULO DE OPTIMIZACIÓN DE LA MEMORIA VIRTUAL ......................... 112 22.1 COSTES INDIVIDUALES ...................................................................................... 112 22.1.1 Costes de fabricación ..................................................................................................... 112 22.1.2 Costes de mantenimiento .............................................................................................. 112 22.1.3 Costes de funcionamiento ............................................................................................. 112 22.2 COSTE TOTAL .................................................................................................... 113 22.3 MAPAS DE COSTES ............................................................................................ 113 22.4 OTROS FACTORES ............................................................................................. 113 22.5 TABLA RESUMEN DE VARIABLES ........................................................................ 113 23 REFERENCIAS ............................................................................................................... 115 7
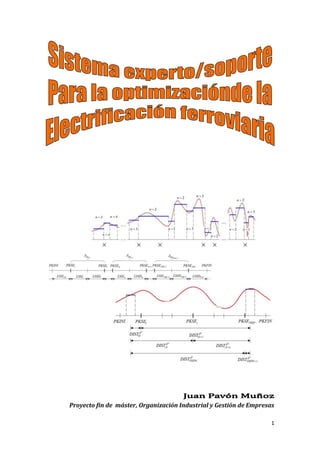
- 8. 1 RESUMEN La electrificación de líneas ferroviarias corresponde al grupo de proyectos reconocidos bajo el nombre de ‘proyectos de ingeniería civil’; pudiendo calificarse como problema de ingeniería multidisciplinar, pues abarca varios sectores de la misma como el de la ingeniería de construcción (subestaciones de tracción, estaciones, túneles, puntos de adelantamiento, etc), ingeniería eléctrica (subestaciones de tracción, instalaciones de protección y puestas a tierra, catenarias, etc), ingeniería del diseño (diseño del trazado por el que discurre); además de necesitar la presencia de estudios geodésicos para el correcto desarrollo de toda la infraestructura, estudios sobre su viabilidad, estudios sobre la nueva creación de empleo, aporte económico y turístico, enriquecimiento de la zona, etc. Además, generalmente este tipo de proyectos; y el de la electrificación ferroviaria notablemente más hoy en día, quedan inmersos en el ámbito político y en el cruce de intereses de ciudades, propietarios de fincas cercanas a donde discurrirá el trazado, etc; lo que hace de él todo un reto de la ingeniería, tomando un nivel de complejidad sumamente elevado en todas sus facetas y aspectos. En el caso particular de la electrificación ferroviaria, se diseña y proyecta una infraestructura cuya función es la de transportar potencia desde puntos de la red de alta y media tensión a puntos de consumo, materiales rodantes. En este proceso de transporte de la potencia se producen una serie de pérdidas; en las acometidas de las subestaciones, en las subestaciones, en las catenarias, en las aparamentas de protección, transformadores y autotransformadores, etc. Por este motivo, en el diseño de la infraestructura no sólo se requiere que el coste de su puesta en escena y mantenimiento sean mínimos a la vez que logre operar correctamente, sino que además lo haga de la manera más eficiente y respetuosa con el medioambiente posible; es decir, haciendo que tales pérdidas y su mantenimiento sean mínimos. Por todo lo anterior, en este proyecto fin de máster se ha realizado un sistema experto/soporte que sirva de ayuda y soporte en la toma de decisiones del diseño de la electrificación. De esta forma, el usuario introduce el trazado (orografía, estaciones, paradas y túneles), características de los materiales rodantes, base de datos de catenarias e instalaciones de puestas a tierra, etc. Además, como dato adicional se introduce aquellos emplazamientos en los que se podría situar las subestaciones de tracción, así como los costes que llevan asociadas cada uno de todos los elementos anteriormente nombrados. Bajo este conjunto de datos, el sistema experto/soporte optimiza el diseño de la electrificación en base a un grupo de parámetros de diversa índole (de precisión, de cálculo cinemático, dinámico, eléctrico, computacional, convergencia, relación de costes fabricación/rendimiento, fabricación/mantenimiento, de carácter restrictivo…) genera configuraciones de la electrificación que cumplen todos los anteriores requisitos, para que el usuario pueda escoger de entre ellas la que mejor se adecue a las pertinencias de la ocasión. Sin embargo, las posibilidades de la aplicación no finalizan aquí, pues el usuario puede modificar el trazado manteniendo las estaciones y paradas que desee y generar así nuevas alternativas a las anteriores con nuevos posibles emplazamientos, fig. 1.1. 8
- 9. Fig. 1.1. Esquema con varias propuestas de trazados y emplazamientos de subestaciones de tracción 9
- 10. 2 PRÓLOGO La memoria se encuentra dividida en tres bloques bien diferenciados; un primero donde se presenta el estado del arte existente, un segundo en el que se presenta la labor de investigación y desarrollo llevado a cabo, y un tercero en el que se presenta el optimizador y su algoritmo. Dentro de cada bloque, se encuentra los siguientes capítulos: ESTADO DEL ARTE Capítulo 3: INTRODUCCIÓN AL ESTADO DEL ARTE. Como su nombre indica, este capítulo introduce al lector en el campo de la electrificación ferroviaria. Capítulo 4: ARQUITECTURA DE LA ELECTRIFICACIÓN FERROVIARIA. En este capítulo se describe brevemente la arquitectura y los componentes más importantes de esta así como sus modos de funcionamiento. Capítulo 5: MATERIAL RODANTE. Describe las fuerzas de resistencia que debe vencer el material rodante en su avance. Capítulo 6: CONDICIONES DE DISEÑO. Cita y describe superficialmente las normativas más destacables a aplicar en el diseño de la electrificación. Capítulo 7: OPTIMIZACIÓN DE LA ELECTRIFICACIÓN FERROVIARIA. En este capítulo se presenta un problema de optimización que de forma simplificada y aproximada resuelve parte de la electrificación para configuraciones simples. INVESTIGACIÓN Y DESARROLLO Capítulo 8: INTRODUCCIÓN AL SISTEMA EXPERTO/SOPORTE. Este capítulo presenta los bloques en que se encuentra dividida la aplicación. Capítulo 9: DATOS DE ENTRADA. Cita los datos de entrada que necesita la aplicación. Capítulo 10: TRATAMIENTO DE DATOS. Describe el tratamiento que se realiza sobre los datos de entrada para operar con ellos posteriormente. Capítulo 11: CINEMÁTICA DEL MATERIAL RODANTE. Presenta el algoritmo utilizado para la obtención del perfil de velocidad del material rodante. Capítulo 12: DINÁMICA DEL MATERIAL RODNATE. Presenta las expresiones de la dinámica del material rodante. Capítulo 13: PARÁMETROS DE LA CATENARIA, CAÍDA DE TENSIÓN Y PÉRDIDAS ELÉCTRICAS. Presenta las expresiones para calcular los parámetros de la catenaria, la caída de tensión y las pérdidas eléctricas que se producen en el transporte de la energía eléctrica. 10
- 11. Capítulo 14: RESOLUCIÓN DE LA ELECTRIFICACIÓN. Presenta los diferentes esquemas de electrificación y sus algoritmos de resolución. Capítulo 15: INTRODUCCIÓN A LA OPTIMIZACIÓN DE LA ELECTRIFICACIÓN FERROVIARIA. Breve introducción a la optimización de la electrificación. Expone de forma superficial los módulos de que consta el algoritmo de optimización. Capítulo 16: ELECCIÓN DEL MÉTODO DE OPTIMIZACIÓN. Presenta los diferentes problemas y métodos de optimización. Al final del capítulo, se elije el método de optimización utilizado en el sistema experto/soporte. OPTIMIZADOR Capítulo 17: INTRODUCCIÓN AL OPTIMIZADOR. En este capítulo se presenta las principales características del algoritmo de optimización. Capítulo 18: ARQUITECTURA DEL OPTIMIZADOR. En él se describe y explica el algoritmo que sigue el optimizador para llegar a una configuración óptima de la electrificación ferroviaria. Capítulo 19: SUBMÓDULO DE COMPARACIÓN CON LA MEMORIA DE DATOS Y SOLUCIÓN INICIAL. Describe y explica el algoritmo empleado por el optimizador para calcular el valor inicial del número máximo de subestaciones de tracción. Capítulo 20: SUBMÓDULO DE VERIFICACIÓN DEL SUBESPACIO DE SOLUCIONES. Describe y expone el algoritmo empleado por el optimizador para verificar el correcto estudio del subespacio de posibles configuraciones óptimas. Capítulo 21: CAMBIO DE CONFIGURACIÓN BÁSICA FACTIBLE/VECINDAD. Describe y expone el algoritmo empleado por el optimizador para cambiar la vecindad de las configuraciones simuladas por el optimizador. Capítulo 22: SUBMÓDULO DE OPTIMIZACIÓN DE LA MEMORIA VIRTUAL. En este último capítulo se presentan las expresiones que empleará el usuario para elegir la configuración final de la electrificación. 11
- 12. 3 INTRODUCCIÓN AL ESTADO DEL ARTE Esta sección de la memoria corresponde al estado del arte del proyecto fin de máster ‘Sistema soporte para la optimización de la electrificación de líneas ferroviarias’. En ella se describe y presenta la información de partida tomada para desarrollar el sistema soporte, obtenida de la búsqueda en diversas bibliografías. Además, se dedica el último capítulo de la sección a la presentación y formulación de un modelo simplificado semejante al problema de optimización de la electrificación con que trabaja el sistema soporte. La electrificación de líneas ferroviarias consta principalmente de subestaciones de tracción (responsables de suministrar la potencia al material rodante a lo largo del trazado ferroviario) y de una catenaria (responsable de transportar la potencia hasta el material rodante). La optimización de la electrificación trata de minimizar el coste de líneas ferroviarias. De esta manera, optimizando por ejemplo la localización de las subestaciones de tracción puede conseguirse un menor coste y/o una menor caída de tensión y/o un menor desequilibrio introducido a la red trifásica, etc; o mediante una correcta optimización del tráfico del material rodante un mejor aprovechamiento de la línea, etc. 3.1 NORMATIVA Y CRITERIOS DE DISEÑO Las normativas y criterios de diseño a cumplir se pueden resumir en siete grandes grupos; (1) caída de tensión en la catenaria, (2) corrientes de la catenaria, (3) potencia en transformadores y autotransformadores, (4) desequilibrios introducidos en la red trifásica, (5) corrientes de contacto y paso, (6) perturbaciones introducidas en líneas paralelas y (7) puestas a tierra. 3.2 DATOS NECESARIOS PARA EL MODELADO Además de los datos correspondientes a las subestaciones de tracción (localización, características de sus transformadores, tipo de conexión a la red trifásica, potencia de cortocircuito, etc), y de la catenaria (impedancia por longitud, longitud de cada tramo, localización de las zonas neutras, etc) es necesario otro tipo de datos. Entre ellos se encuentran los del material rodante (masa, velocidad a la que circula, constitución, etc), las características del trazado e itinerario (estaciones, zonas de velocidad reducida, longitud de curvas y rectas, radios de las curvas y sus peraltes, pendientes y rampas, etc). 12
- 13. 4 ARQUITECTURA DE LA ELECTRIFICACIÓN FERROVIARIA En este capítulo se muestra la constitución y características generales de la electrificación ferroviaria. Desde un amplio punto de vista, la electrificación ferroviaria consta de subestaciones eléctricas, llamadas subestaciones de tracción; que suministran potencia, que toman de la red trifásica; al material rodante a través de una red de transporte, las catenarias (subsectores), fig. 4.1. Fig. 4.1. Esquema de la electrificación Desde un punto de vista relativamente amplio también, puede diferenciarse dos grandes tipos de electrificación según si se alimenta la potencia en CC o CA. Además, en alimentación en CA pueden diferenciarse según el sistema de transporte habiendo dos tipos, el sistema monotensión ó 1x25kv y sistema bitensión ó 2x25kv. Además, cada uno de los tres tipos anteriores puede existir en una configuración de vía simple o vía doble. De esta forma se obtiene seis posibles configuraciones eléctricas. 4.1 SISTEMA DE ALIMENTACIÓN En CA y obviando la posibilidad de configuración en simple o doble vía, la diferencia radica en el transporte de la corriente eléctrica desde la subestación hasta el punto de consumo (material rodante). En el sistema bitensión se realiza a una tensión superior, (50 kv); a la de consumo (25 kv, generalmente 27’5 kv). De esta forma disminuye la caída de tensión en la catenaria respecto el sistema monotensión. El uso de este sistema implica el uso de autotransformadores; distribuidos (de manera uniforme generalmente) a lo largo de la catenaria, que se encargan de reducir la tensión desde la catenaria (50 kv), al punto de consumo (25 kv). El uso de un sistema u otro dependerá de la lejanía de la conexión a la red trifásica y longitud del subsector principalmente, utilizándose el sistema bitensión para distancias grandes y en caso contrario el monotensión por ser más económico. En el caso de CA y también obviando la posibilidad de configuración en simple o doble vía, se transporta la corriente eléctrica a la misma tensión que demanda el punto de consumo. En este aspecto tiene similitud con el sistema en CA 1x25kv. La diferencia radica 13
- 14. en la conexión de todas las subestaciones a través de la barra ómnibus. Además, la alimentación es en CC, que es la principal y más importante diferencia. Como última diferencia a destacar se encuentra la posibilidad de tener simple o doble vía. La diferencia entre ambas configuraciones se debe a la unión de las catenarias de ambos sentidos en la configuración doble vía. De esta forma se consigue mejorar la caída de tensión hasta el punto de consumo haciendo el transporte más eficiente. 4.2 SUBESTACIONES DE TRACCIÓN Son las responsables de adquirir la potencia de la red trifásica y transformar la tensión hasta la de consumo (25 kv, generalmente 27’5 kv; sistema monotensión) o a una intermedia (50 kv; sistema bitensión). Cada subestación en modo de funcionamiento normal alimenta dos subsectores generalmente (también existen excepciones de subestaciones con un único subsector), cada uno de ellos con un transformador. En CA destaca el tipo de conexión a la red trifásica, pues la alimentación al material rodante es mediante monotensión alterna. Dependiendo del tipo de conexión (normalmente triángulo abierto-estrella abierto o a veces mediante la conexión de Scott, fig. 4.2), el desequilibrio generado en la red trifásica variará. Además, las fases de conexión se van alternando para conseguir un menor desequilibrio. Fig. 4.2. Conexión triángulo abierto -estrella abierto y de Scott respectivamente En CC el paso de CA (red trifásica externa) a CC se realiza mediante un grupo transformador-inversor localizado en las subestaciones. Este sistema no genera desequilibrios en la red trifásica externa, pues todas las fases alimentan a la catenaria y no como ocurre en CA y muestra la figura fig. 4.2. 4.3 CATENARIA La catenaria está formada por grupos de conductores, formado cada uno por varios conductores (generalmente), que se unen en nodos comunes cada cierta distancia para que la tensión de estos sea homogénea entre ellos. Los grupos de conductores existentes en la catenaria dependerán del sistema utilizado. En CA (sistemas 1x25 kv y 2x25 kv) y en CC, con independencia de ser simple o doble vía; se encuentran los grupos de conductores de alimentación, o conductores positivos; y grupo de conductores neutros. Por otra parte, si el sistema utilizado en CA es 14
- 15. el bitensión estará presente además el grupo de conductores negativos encargado del retorno de la corriente, fig 4.3. En el grupo de conductores positivos están el hilo de contacto (en él hace contacto el pantógrafo), el sustentador (soporta el peso del hilo de contacto a través de las péndolas) y los feeders positivo y feeders positivos de refuerzo (conductores de refuerzo para aquellas ocasiones que lo requieran). En el grupo de los conductores de neutro están los carriles (captadores de corrientes que salen de los trenes) y los cables de retorno (refuerzo de los carriles). Por último, en el grupo de conductores negativos están el feeder negativo (configura el circuito de retorno para las corrientes en el sistema bitensión) y el feeder de refuerzo negativo (para las ocasiones con grandes cargas eléctricas). Fig. 4.3. Esquema de la catenaria 4.4 TRANSFORMADORES Y AUTOTRANSFORMADORES Los transformadores y autotransformadores son elementos importantes en el diseño de la electrificación. Su costo en proporción a la caída de tensión que generan es bastante mayor al de las catenarias, por lo que prima su correcta elección y dimensionamiento, aún más cuando el funcionamiento es en modo degradado. Es decir, ha de evitarse en la medida de lo posible un diseño con muchos transformadores y autotransformadores. 4.5 ZONAS NEUTRAS La función de las zonas neutras es aislar un subsector de los subsectores adyacentes. Esto se consigue a través de tramos de catenaria sin alimentación con longitudes mínimas de 402 metros. El objetivo perseguido con la inclusión de las zonas neutras es el poder alimentar un subsector desde otra subestación en modo de funcionamiento degradado. 15
- 16. Fig. 4.4. Esquema de una zona neutra 4.6 MODOS DE FUNCIONAMIENTO Los distintos modos de funcionamiento se resumen bajo dos bloques, el modo normal y el degradado. En el modo de funcionamiento normal la electrificación opera según la arquitectura con fue diseñada (como su nombre indica), mientras que en el modo degradado la arquitectura cambia respecto la normal, debido a la aparición de un fallo en la electrificación. Los fallos que degeneran en un funcionamiento degradado se resumen en dos tipos normalmente, indisponibilidad de una subestación o transformador, fig. 4.5 y fig. 4.6; y/o indisponibilidad de algún tramo de catenaria, fig. 4.7. Estos fallos obligan a alimentar los subsectores de la subestación no disponible desde los subsectores anexos o de la subestación anexa respectivamente. Al ser estas situaciones totalmente posibles deben considerarse en el diseño de la electrificación al igual que las del modo normal, siendo normalmente las del modo degradado las más restrictivas y por tanto las que marcan el diseño de la electrificación. Fig. 4.5. Indisponibilidad de subestación de tracción Fig. 4.6. Indisponibilidad de transformador Fig. 4.7. Indisponibilidad de tramo de catenari a 16
- 17. 5 MATERIAL RODANTE Las variables que modelan al material rodante pueden llegar a tomar valores muy dispares, imagine las diferencias entre un tren de pasajeros y un tren de mercancías. Además, el valor de una variable puede verse afectada o influida por el cambio de otra; por ejemplo la masa del material rodante aumenta o disminuye en función de la carga variando a la vez la capacidad de respuesta del material rodante e influye directamente en las fuerzas de resistencia al avance en curva por ejemplo. Por esto es necesario considerar los cambios en las variables, ya que de no ser así la solución óptima obtenida podría distar bastante de la solución óptima real. Llegado a este punto y conocido el perfil de velocidad se modela el comportamiento dinámico del material rodante para obtener la potencia que demanda por el mismo. La potencia demandada por el material rodante es la potencia recibida en el pantógrafo y variará según el lugar del trazado (rectas, pendientes, curvas, túneles, etc) clima y/o instante del día (meteorología, uso del aire acondicionado, necesidad de refrigeración de los motores, etc), [Dinámica de los trenes en alta velocidad, Alberto García Álvarez, 4ª ed. 2007] y [Diseño óptimo de la electrificación de ferrocarriles de alta velocidad, D. Eduardo Pilo de la Fuente, 2003]. Para una mejor comprensión, en adelante se hablará de la fuerza realizada por el/los motor/es tractor/es del material rodante, directamente relacionada con la potencia consumida. La fuerza resultante; (recuérdese que potencia y fuerza van en consonancia), se obtiene a partir de las fuerzas que están presentes en la dinámica longitudinal del material rodante, es decir resistencia al avance (se componen del término estático, el de velocidad y el aerodinámico), resistencia en curvas, resistencia debido a la gravedad (a favor o en contra dependiendo si se desciende o asciende) y fuerza de tracción y/o frenado (o ninguna de ellas en caso de circular a la deriva). Según el valor de la fuerza total pueden darse tres situaciones diferentes; aumentar, disminuir y mantener la velocidad; valor positivo, negativo y nulo respectivamente. 5.1 RESISTENCIA AL AVANCE Las fuerzas de resistencia al avance se modelan mediante la “fórmula de Davis”, (5.1). La fórmula original incluye el coeficiente T f (factor túnel) en el coeficiente C. Aquí se modifica dicha expresión original no incluyéndolo para una mejor comprensión. Ra A BV CT f V 2 ; (5.1) El coeficiente A es el término estático de la resistencia al avance y modela el rozamiento interno (cojinetes y manguetas, rueda-carril, etc), irregularidades en la vía, pérdida de energía en aparatos de tracción y choque, pérdida de energía en la suspensión, etc; y es constante para cada tren o composición (si el material rodante fuera compuesto, por ejemplo un tren de mercancías), [Norma Técnica de determinación de las Cargas máximas Renfe NT-CGC-6 (2001)]. 17
- 18. El coeficiente B modela el caudal de aire que entra al tren; que es acelerado hasta la velocidad del tren. Este caudal es utilizado para la refrigeración de los motores y para los servicios auxiliares; renovación del aire de los pasajeros, aire acondicionado, etc. Este término además de depender del tren o composición del mismo (valor de B), depende de la velocidad y también de la meteorología; la aceleración del caudal de aire depende de las condiciones atmosféricas. Igualmente, depende del lugar de la vía; en túneles y para trenes de alta velocidad por ejemplo se cierra la entrada de aire para evitar que se produzcan ondas de presión, molestas para los pasajeros; [Túneles para trenes de alta velocidad; Fricción y ondas producidas por el tren, (Revista de obras públicas, num. 3415, Nov. 2001, Madrid)]. El coeficiente C considera la resistencia aerodinámica. Es el término más complicado de calcular y el más importante en trenes de alta velocidad, [Conceptos aerodinámicos sobre el movimiento de los trenes, Alonso, J. M (2004)]. Este coeficiente depende de la meteorología (densidad del aire), y en gran medida de la aerodinámica y geometría del tren (área de la sección trasversal, longitud, rugosidad de la superficie, integración del pantógrafo en el tren, discos de freno y otros elementos salientes, etc). En lo que respecta al factor túnel, este toma un valor unidad ante inexistencia de túnel y un valor superior a la unidad en caso de túnel, el cual variará en función de las características del túnel y del material rodante, [Caracterísitcas aerodinámica de los túneles en el tráfico de alta velocidad, num. 45, Glökle, H (1996)], [Túneles para trenes de alta velocidad; Fricción y ondas producidas por el tren, (Revista de obras públicas, num. 3415, Nov. 2001, Madrid)]. 5.2 RESISTENCIA EN CURVA La resistencia en curva es debida a la fricción existente entre las pestañas de las ruedas del material rodante con el carril y al arrastre que sufre la rueda exterior al circular en curva, ya que las ruedas de un mismo eje son solidarias con este (salvo en las cabezas tractoras). La expresión matemática que modela esta resistencia (se ha probado empíricamente) es la siguiente, (5.2) 600 Rac M ; (5.2), para ancho de vía de 1’435 m. R (para anchos de vía de 1’668 m sustituir 600 por 800) También es importante saber que circulando en curva, conforme aumenta la velocidad disminuye la importancia de la resistencia en curva. La causa es que a mayor velocidad de circulación mayores son los radios de las curvas y por tanto menor la fricción y consecuentemente la resistencia, [Dinámica de los trenes en alta velocidad, Alberto García Álvarez, 4ª ed. 2007]. 18
- 19. 5.3 RESISTENCIA POR GRAVEDAD Esta resistencia modela la presencia de rampas a remontar por el material rodante. En estos casos, la fuerza decelera el movimiento y es opuesta a este. Por el contrario, si es una pendiente a descender, las fuerzas son aceleradoras y están a favor del movimiento. La expresión que modela esta resistencia es la que aparece abajo, (5.3). Rag Mgi ; (5.3) Para modelar si se está en el caso de rampa (asciende) o en el de pendiente (desciende), se le añade (manualmente) el signo positivo (asciende) o negativo (desciende) al coeficiente i, inclinación del trazado. El caso en que la línea sea horizontal, la inclinación es nula y este término toma valor nulo. 5.4 FUERZAS DE TRACCIÓN Y/O FRENADO Son las fuerzas que ejerce el material rodante para regular la velocidad de desplazamiento, actuando una u otra en una situación normal. Puede darse el caso en que no actúe ninguna de las dos, circulando el tren en una situación denominada “deriva”. También, como última posible situación aunque no es lo normal; pueden estar actuando las dos a la vez. La fuerza de tracción que puede realizar las cabezas tractoras está limitada por la potencia máxima que éstas pueden desarrollar, pero además también por la adherencia (ruedas-carril) y en algunos casos por la velocidad máxima del tramo de vía por el que se circule. Además, hay que diferenciar entre el esfuerzo de tracción máximo (realizado en cortos periodos de tiempo) y el esfuerzo unihorario (esfuerzos que las cabezas tractoras pueden realizar indefinidamente sin desgastes y daños prematuros), [Dinámica de los trenes en alta velocidad, Alberto García Álvarez, 4ª ed. 2007], (5.1). El esfuerzo de tracción que puede realizar cada cabeza tractora es distinto y depende además de la velocidad a la que circule, [Horarios, marchas, tipo; cargas máximas; velocidades máximas, Peyrat, M. (1960)]. Por ello, cada cabeza tractora posee sus propias curvas de esfuerzo de tracción- velocidad. Las fuerzas de frenado, en discordancia con las de tracción; también pueden ser ejercidas por los vagones o coches, ya sean de pasajeros o de mercancías. Por esto, normalmente al aumentar la longitud del material rodante se aumenta también el esfuerzo de frenado. Las fuerzas de frenado a su vez se dividen en distintos grupos, diferenciándose las fuerzas ejercidas por los discos de frenos, las ejercidas por los frenos aerodinámicos; [Estado del arte en los estudios e investigaciones sobre la aplicabilidad de frenos aerodinámicos en trenes de alta velocidad, Ávila Sanz, F. Barroso Fernández, M. T., Hernández Redondo, (1999)], y las ejercidas por corrientes de Focault. En el caso de los esfuerzos de frenado, se distingue; [ETI Material Rodante], el frenado de servicio (empleado en la marcha ordinaria del material rodante) y el frenado de emergencia (máximo esfuerzo de frenado, para situaciones extraordinarias). Al igual que para los esfuerzos de tracción, existen curvas de esfuerzo de frenado-velocidad, sólo que en este caso las curvas corresponden al material rodante y no sólo a la cabeza tractora. 19
- 20. La potencia de tracción es la fuerza de tracción que ejercen las cabezas tractoras en la unidad de tiempo. Aunque los equipos auxiliares; (aire acondicionado por ejemplo), normalmente disponen de generadores independientes al motor de tracción, no toda la potencia de tracción desarrollada llega al eje de las ruedas, existiendo de esta manera un rendimiento eléctrico-mecánico a tener en cuenta. Como último apunte, es necesario remarcar la importancia de la adherencia tanto en la tracción como en el frenado. El valor de la adherencia depende de diversos factores que van desde las condiciones meteorológicas (humedad del ambiente, humedad del carril, existencia de agua en el carril, etc), hasta el estado del carril y de las ruedas (deteriorado, suciedad, etc). En muchas ocasiones es la adherencia la que fija los esfuerzos máximos de tracción y frenado a desarrollar, por lo que este valor debe ser calculado cuidadosamente, [Dinámica de los trenes en alta velocidad, Alberto García Álvarez, 4ª ed. 2007], [ETI, para valores máximos en el diseño] y [Arenillas, 2006]. 5.5 MASA DE LA ECUACIÓN DE LA DINÁMICA La ecuación de la dinámica del movimiento longitudinal del material rodante es la 2ª ley de Newton, (5.4). En este caso, no es sólo la masa del material rodante la que hay que acelerar (aceleración longitudinal), sino además las ruedas y ejes del mismo (aceleración centrípeta), [Dinámica de los trenes en alta velocidad, Alberto García Álvarez, 4ª ed. 2007]. FR aM * ; (5.4) De esta forma, la masa equivalente a sustituir en la ecuación de la dinámica es la obtenida de la expresión (5.5). ri 2 n M M M gi 2 ; (5.5) * j 1 Ri 5.6 ECUACIÓN DE LA DINÁMICA DEL MATERIAL RODANTE Recopilando la información expuesta en los apartados anteriores, se tiene que la ecuación de la dinámica para el material rodante es FR aM * ; (5.6) donde FR FT FF Ra '' ; (5.7) 600 Ra '' Mgi A BV CT f V 2 M ; (5.8), para ancho de vía de 1’435 m R Ra '' Mgi M a ' b 'V c 'T f V 2 M 600 R ; (5.9), para ancho de vía de 1’435 m 20
- 21. (para anchos de vía de 1’668 m sustituir 600 por 800). n ri 2 M * M M gi ; (5.10) j 1 Ri2 5.7 TABLA-RESUMEN DE VARIABLES Tipo de variable Entrada Variable Descripción Salida Coeficientes de resistencia al avance estático, el de la velocidad y el A, B y C X * aerodinámico a' , b' y X * Coeficientes A, B y C por unidad de masa c' M X - Masa del marial rodante V - X Velocidad del marial rodante i X - Inclinación (positiva si asciende, negativa si desciende) FT y FF X - Fuerza de tracción y la de frenado R X - Radio de las curvas del trazado ferroviario M gi X - Masa giratoria i Ri X - Radio de las ruedas del material rodante i ri X - Radio de inercia polar del conjunto de ejes-ruedas i Tf X - Coeficiente de túnel ( T f 1 no hay túnel y T f 1 si hay) g X - Gravedad Tabla 5.1. Tabla-resumen de variables del capítulo 5 21
- 22. 6 CONDICIONES DE DISEÑO La electrificación de líneas ferroviarias, como todo proyecto; tiene que atenerse a una serie de condiciones de diseño y normativas reguladoras. En este proyecto, diseño óptimo de la electrificación; deben cumplirse las condiciones y normativas que se aplican a la electrificación ferroviaria; (1) tensiones en la catenaria, (2) corrientes en la catenaria, (3) potencia en transformadores y autotransformadores, (4) desequilibrios generados en la red trifásica, (5) tensiones de contacto y de paso, y (6) tensiones inducidas. 6.1 TENSIONES EN LA CATENARIA La normativa que regula las tensiones de las catenarias indica las tensiones máximas y mínimas admisibles (tensiones instantáneas y mantenidas), y la duración de estas [Commission European (2002)] y UIC-600 [UIC Union des Chemins de Fer (1981)]; tabla 6.1. Tabla 6.1. Tensiones máximas y mínimas admisibles Las restricciones de diseño son del tipo (6.1) ; (6.1) Además, para realizar un estudio más completo de las tensiones de las catenarias se suelen estudiar las tensiones medias útiles para un tren determinado o una zona, UIC- 796 [UIC Union des Chemisn de Fer (2000)] y posteriormente el anexo L de la ETIe [Commission European (2002)], (4.2). ; (6.2) También, si para verificar las condiciones y normativas de diseño se utilizan programas informáticos puede ser interesante aplicar la expresión (6.3). ; (6.3) 22
- 23. Por otra parte, si se prefiriera o fuera necesario utilizar como verificación las tensiones medias útiles, aseguran de forma estadística el cumplimiento de las restricciones (6.1); se aplicarían las restricciones (6.4) y la tabla 6.2. ; (6.4) Tabla 6.2. Tensiones mínimas útiles 6.2 CORRIENTES DE LA CATENARIA Este criterio suele estar determinado por los valores de la corriente máxima admisible proporcionada por el fabricante de los conductores. En caso contrario, el capítulo V del Reglamento de Líneas de Alta Tensión [Energía, Ministerio de Industria y Fomento (1989)] proporciona valores que pueden tomarse como referencia. Indiferentemente de conocer o no las corrientes máximas admisibles de los conductores, es necesario calcular las corrientes que circulan por cada uno de ellos. En líneas ferroviarias, el valor que toman las corrientes varía más rápido que la constante de tiempo térmica (UIC-798 [UIC Union de Chemins de Fer (1996)]), por lo cual es aconsejable tomar valores medios, media cuadrática (valor que produce el mismo calentamiento en el tiempo considerado); en lugar de instantáneos, (6.5). ; (6.5) Las restricciones para este criterio son ; (6.6) Si se necesitara más precisión, normalmente es suficiente con la expresión (6.5); suelen realizarse estudios sobre el calentamiento de los conductores. 6.3 POTENCIA EN TRANSFORMADORES Y AUTOTRANSFORMADORES Las condiciones de operación de un transformador, igual que para un autotransformador; están directamente ligadas a la temperatura de funcionamiento. Dicha temperatura no debe superar un valor límite, (6.7). ; (6.7) 23
- 24. La temperatura que alcanza un transformador (o autotransformador) se debe al calor generado por las pérdidas del hierro y del cobre, estando ambas directamente relacionadas con la potencia que este suministra. Por tanto, el anterior criterio pasa a fijarse mediante la potencia en lugar de mediante la temperatura, (6.8); o se suma a este como segundo criterio. ; (6.8) Al igual que las tensiones y las corrientes de las catenarias, la potencia también varía. Debe utilizarse de nuevo valores obtenidos mediante medias, aritméticas o cuadráticas; (6.10) y (6.11); o fijar un valor máximo en su defecto, (6.9). ; (6.9) 6.3.1 Media aritmética ; (6.10) 6.3.2 Media cuadrática ; (6.11) Por último, si es necesario mayor precisión se realizan estudios sobre el calentamiento, para los cuales es muy importante el tipo de refrigeración utilizada. 6.4 DESEQUILIBRIOS EN LA RED TRIFÁSICA Este criterio viene impuesto por los operadores a los que se conectan las subestaciones, REE (Red Eléctrica España); que exigen una calidad mínima de onda ya que la electrificación mediante CA, corriente alterna monofásica en este caso; genera desequilibrios en la red trifásica que alimenta las subestaciones de tracción, [Mahn U. (1994)]. Los desequilibrios pueden ser de distintos tipos dependiendo la forma en que se conecten las subestaciones a la red, [Chen Tsai-Hsiang (1994)], mientras que la magnitud depende de la potencia consumida por el subsector y de la potencia de cortocircuito de la red trifásica en el punto de conexión. Para reducir el valor del desequilibrio, la forma de conexión suele ser abierto - abierto, además de ir rotando las fases sucesivas a las que se conecta para anular la componente homopolar de corrientes y tensiones. 24
- 25. Tabla 6.3. Ejemplos de rotación de las fases De esta forma, el criterio fija que el desequilibrio introducido en la red trifásica debe ser inferior a un valor máximo fijado por el operador, REE (Red Eléctrica España); (6.12). Para obtener el valor del desequilibrio en el nudo n de la red se utiliza la expresión (6.13). También como referencia puede consultarse la norma UNE-EN 50160 [AENOR (1996)]. ; (6.12) ; (6.13) Para obtener los valores de las tensiones en componentes simétricas se utiliza la expresión (6.14), siendo necesario conocer las tensiones en componentes de fase del nudo donde se calcula el desequilibrio. Para ello se determina el punto de funcionamiento de la red (resolución de un flujo de cargas trifásico), en componentes fases [Wortman M. A., Allen D. L. y Grisgby l. L. (1985); Zhang X. P. (1995)] o [Lo K. L. y Zhang C. (1993); Gómez Expósito A., Abur A., Alvarado F. L. et al. (2002)] en componentes simétricas. ; (6.14) Además, también existen criterios que limitan la duración del desequilibrio, recogidos en la tabla 6.4. Otra referencia es la norma UIC-798 [Union des Chemins de Fer (1996)], que sugiere calcular los desequilibrios medios en intervalos de 1 a 10 minutos. Tabla 6.4. Rango de desequilibrios admisibles 6.5 PERTURBACIONES Las perturbaciones entre líneas ocurren cuando dos líneas cercanas discurren paralelas, y se deben a inducciones de tensión en la línea paralela por acoplamientos magnéticos y/o derivación de corriente hacia la línea perturbada por acoplamientos capacitivos; (ley de Faraday-Lenz), [Hill R. J. (1997)]. Es necesario por tanto cuantificar el valor de las tensiones inducidas para asegurar que no suponen un peligro para las líneas o instalaciones afectadas; [AG Siemens (1993); Satsios K. J., Labridis D. P. y Dokopoulos P. S. (1999)]. 25
- 26. Considerando estos aspectos, las restricciones de diseño son las expresiones (6.15). Además, igual que para los desequilibrios trifásicos existen unos valores máximos permitidos que dependerán del tipo de línea perturbada y de la duración. Para líneas de telecomunicaciones puede tomarse como referencia la normativa Unión Internacional de Telecomunicaciones [ITU-T]. ; (6.15) Para calcular la tensión inducida, las líneas se dividen en tramos para que en ellos estas sean lo más paralelas posible y la corriente en los conductores equivalentes uniforme, fig. 6.1. Además, al poder circular corriente en ambos sentidos se cancelan en tales puntos; fig. 6.1. Fig. 6.1. Tramos de cate naria con la misma tensión inducida y cancelación de tensiones inducidas El valor de la tensión inducida en un punto de la línea paralela viene dado por la expresión (6.16), que es la suma de las tensiones inducidas entre en inicio de la línea paralela externa y el punto considerado. ; (6.16) 6.6 TENSIONES DE CONTACTO Y PASO En la electrificación de ferrocarriles, parte de la corriente que circula por los conductores de neutro, carriles; es inyectada en la tierra; fig. 6.2. Estas corrientes modifican el potencial del suelo que deja de ser nulo, apareciendo las corrientes de paso y contacto; [Sakis A. P. (1988); Chow Y. L., Salama M. M. A. y Djogo G. (1999)]. Al suponer un peligro, se emplean tomas de puesta a tierra para limitar el valor de dichas tensiones a unos límites establecidos. 26
- 27. Fig. 6.2. Circuito de las corrientes de neutro El criterio, nuevamente; adquiere la forma de los anteriores; (6.17). ; (6.17) Para calcular los valores, la ITC-13 del Reglamento de Centrales Eléctricas, [Energía, Ministerio de Industria y Fomento, (1983)]; establece una serie de ecuaciones para la tensión máxima que puede soportar el cuerpo humano sin sufrir daños irreversibles según la duración de la exposición (en cortocircuito típicamente 100 milisegundos, mientras en funcionamiento normal dependerá de la velocidad del tren e impedancia de los conductores de neutro respecto tierra, razonablemente mayor de 5 s); (6.18). ; (6.18) Conociendo la resistividad del suelo y modelando el contacto persona-suelo, las expresiones de las tensiones de paso y contacto que puede soportar una persona son (6.19); [García Márquez R. (1991)]. ; (6.19) Por otra parte, conociendo la configuración de la toma de tierra, fig. 6.3; pueden calcularse los puntos en los que las corrientes alcanzan su máximo, fig. 6.4; y diseñar bajo este valor, o si se requiere mayor precisión pueden emplearse métodos de elementos finitos; [Natarajan R, Imece A. F. y Popoff J. (2001)]. Para calcular las tensiones de contacto y paso es preciso conocer las tensiones de neutro y la matriz de admitancias nodales del circuito. La fig. 6.5 muestra los circuitos a resolver y los valores de las tensiones de contacto y paso se obtienen mediante las expresiones (6.20). 27
- 28. Fig. 6.3. Configuraciones típicas de puesta a tierra Fig. 6.4. Valores máximos de las corrientes de contacto y paso Fig. 6.5. Circuitos monotensión y bitensión a resolver para el cálculo de las tensiones de neutro , ; (6.20) Los coeficientes k p y k r se encuentran tabulados para configuraciones de tomas de tierra típicas, [UNESA (1989)]. En su defecto, tendrán que utilizarse métodos de elementos finitos. Como ejemplo, la ecuación de la tensión de una pica cilíndrica, (6.21). ; (6.21) 6.7 TABLA-RESUMEN DE VARIABLES Variable Tipo de Descripción 28
- 29. variable Entrada Salida V x, t - X Tensión en cualquier P.K e instante Vmax X - Tensión máxima admisible para la catenaria Vmin X - Tensión mínima admisible para la catenaria Vmedia _ útil - X Tensión media útil Ti X - Periodo de estudio del tren i Tensión eficaz momentánea en el pantógrafo del tren i a la V panto_ i X - frecuencia de alimentación Módulo de la corriente eficaz momentánea que recibe el pantógrafo I panto_ i X del tren i a la frecuencia de alimentación ntrenes X - Número de trenes considerados en el estudio M X - Número de etapas de cálculo que incluye el periodo de integración N X - Número de periodos de integración considerados en la simulación V j ,k X - Tensión eficaz a la frecuencia de alimentación t X - Duración de la etapa M I mc - X Corriente cuadrática media N X - Número de pasos de integración considerados I mc tc, x, t - X Corriente cuadrática media que circula por el conductor de tipo tc en el P.K x en el instante t I max tc X - Corriente máxima admisible para un conductor tipo tc tr, t - X Temperatura del transformador tr en el instante t max tr X - Temperatura máxima admisible por el transformador tr S max t - X Valor máximo de la potencia en el intervalo considerado Snomin al tr X - Potencia nominal del transformador tr S m.a. t - X Potencia media calculada con media aritmética S m.c. t - X Potencia media calculada con media cuadrática V X - Duración de la ventana de tiempos considerada Dn - X Desequilibrio del nudo n Dmax X - Desequilibrio máximo admisible V1 n X - Componente directa de la tensión V2 n X - Componente inversa de la tensión Vabc - X Vector de las componentes de la tensión de fase V012 X - Vector de las componentes de la tensión simétrica, V pert t , lp Valor absoluto de la tensión inducida en la línea perturbada lp en el instante t V pert,max lp X - Máxima tensión admisible en la línea perturbada I pert t , lp - X Valor absoluto de la corriente inyectada en la línea perturbada lp en el instante t I pert,max lp X - Máxima corriente admisible en la línea perturbada 29
- 30. Término correspondiente al coeficiente de inducción mutua por X - unidad de longitud en la zona k entre los conductores positivo y externo Término correspondiente al coeficiente de inducción mutua por X - unidad de longitud en la zona k entre los conductores negativo y externo Corriente que circula por el conductor equivalente positivo en la X - zona k Corriente que circula por el conductor equivalente negativo en la X - zona k - X Tensión inducida en el P.K X X - Longitud de la zona k V p pt , t - X Tensión de paso en la puesta de tierra pt en el instante t Vc pt , t - X Tensión de contacto en la puesta de tierra pt en el instante t Tensión máxima admisible por el cuerpo humano sin sufrir daños VCA - X irreversibles V p ,max - X Tensión máxima de paso que puede soportar una persona Vc ,max - X Tensión máxima de contacto que puede soportar una persona X - Resistividad eléctrica del suelo Vc - X Tensión de contacto Vp - X Tensión de paso Vneutro X - Tensión de neutro k p , kr y kc X - Coeficientes de proporcionalidad X - Resistividad eléctrica del material de la pica I X - Intensidad que recorre la pica r X - Radio de la pica l X - Longitud de la pica Tabla 6.5. Tabla-resumen de variables del capítulo 6 30
- 31. 7 OPTIMIZACIÓN DE LA ELECTRIFICACIÓN FERROVIARIA En este capítulo se presenta un modelo de optimización de la electrificación ferroviaria. El modelo es el desarrollado en la Tesis doctoral de Eduardo Pilo de la Fuente, “Diseño óptimo de la electrificación de ferrocarriles de alta velocidad”, Universidad Pontificia Comillas de Madrid, 2003. Es un modelo de optimización muy simplificado, en el que el sistema 2x25 kv se modela mediante un sistema 1x25 kv equivalente [Diseño óptimo de la electrificación de ferrocarriles de alta velocidad, Universidad Pontificia Comillas de Madrid, 2003], y no se consideran configuraciones en doble vía. Además, no se incluye el modelado de los sistemas en CC. Sin embargo, aún siendo un modelo muy simple, da la visión de complejidad que posee un modelo de este tipo, precisión y magnitud. Las posibilidades que ofrece el modelo son: (1) localización y selección del tipo de subestaciones, (2) localización y tipo de los autotransformadores, (3) localización y tipo de cada tramo de catenaria y (4) localización de zonas neutras. 7.1 CONDICIONES DE DISEÑO Al pertenecer el diseño óptimo final al conjunto de soluciones admisibles, deberá cumplir las condiciones y normativas de diseño que son: (1) tensiones en la catenaria, (2) corrientes en la catenaria, (3) potencia en transformadores y autotransformadores, (4) desequilibrios generados en la red trifásica, (5) tensiones de contacto y de paso, y (6) tensiones inducidas. De estos requisitos, el diseño de la red de puestas a tierra (tensiones de contacto y paso) y las tensiones inducidas a líneas paralelas pueden resolverse independientemente, quedando ambos criterios desacoplados. Además, es habitual conocer la posición de alguna/s subestación/es (entrada de núcleos urbanos). En estos casos, el problema puede ser dividido en tantos tramos como tramos conocidos se tengan. Por último, la elección del nudo al que conectar la subestación está normalmente limitado por la disponibilidad; potencia de cortocircuito y potencia máxima que es capaz de suministrar. 7.2 COSTES DE LA ELECTRIFICACIÓN El modelo debe recoger los costes de los distintos bloques presentes en la electrificación. De esta manera, recoge los costes relacionados con la catenaria, subestaciones de tracción, puestos de autotransformación y zonas muertas. Dentro de cada bloque se considera: -Catenaria: colocación de postes, ménsulas, péndolas, aisladores y conductores necesarios y sus respectivas longitudes y posiciones. 31
- 32. -Subestaciones de tracción: instalaciones necesarias (transformadores, protecciones, elementos de corte, etc), punto de conexión a la red trifásica. -Puestos de autotransformación: instalaciones necesarias (autotransformadores, elementos de protección, etc). -Zonas neutras: instalaciones necesarias (elementos de protección, etc). 7.3 ALTERNATIVAS DE ALIMENTACIÓN DESDE LA RED TRIFÁSICA Para plantear el problema de optimización es imprescindible conocer la localización de las subestaciones; pues según sea esta, la caída de tensión y pérdidas eléctricas en el punto de consumo tomará un valor u otro. El criterio utilizado para elegir la localización depende de factores como la cercanía de puntos de conexión (subestaciones), líneas a las que conectarse, presencia de zonas de especial protección (en ellas no se pueden situar), etc. De todas aquellas localizaciones candidatas, se descartan las inviables (líneas sobrecargadas usualmente, subestaciones sin posibilidad de ampliación y/o con potencia de cortocircuito insuficiente, etc). También debe considerarse que una misma subestación sólo puede abastecer a tramos de catenaria con las mismas características (sistema monotensión o bitensión, potencia máxima, etc). 7.4 SISTEMA DE ALIMENTACIÓN El sistema de alimentación utilizado es un dato de entrada que es necesario conocer para el cálculo de la caída de tensión. Puesto que se trata de optimizar la electrificación, es preferible diseñar pudiendo utilizarse en el diseño ambos sistemas, el monotensión y el bitensión. Así, se utilizará el monotensión en aquellos casos en los que la conexión a la red trifásica sea relativamente barata o la línea ferroviaria discurra cerca del punto de conexión. En cambio, el sistema bitensión se utilizaría para ocasiones en las que el punto de conexión sea lejano. Sin embargo, el hecho de diseñar con ambos sistemas puede ser un inconveniente desde el punto de vista de operar en modo degradado. El inconveniente surge cuando en el modo degradado se conecta una catenaria alimentada originalmente por un sistema monotensión/bitensión a una subestación que alimenta con el sistema bitensión/monotensión. Aunque el funcionamiento de estas conexiones es posible, su funcionamiento es ineficiente en ambos casos. Por ello, se prefiere que todas las conexiones sean monotensión/monotensión y/o bitensión/bitensión para ambos modos de funcionamiento (incluidas las del transformador-catenaria), si bien ambos sistemas podrán estar presentes en el mismo diseño. Aún así, permanece otro inconveniente menor; que es la imposibilidad de conectar cualquier subestación con cualquier subsector (pueden ser de distinto sistema), quedando las configuraciones de modo degradado predeterminadas. Sin embargo, este inconveniente puede corregirse a costa de tener menos opciones en la optimización. La 32
- 33. solución pasa por utilizar un único sistema en el diseño, siendo posible de esta manera cualquier conexión en el modo degradado. 7.5 PROCEDIMIENTO DE DISEÑO El procedimiento de diseño a seguir es el que muestra la fig. 7.1. En él se realiza una preselección de las localizaciones factibles para las subestaciones, quedando recogidas todas las características asociadas a éstas en una base de datos. Igualmente, se realiza un repositario de catenarias y autotransformadores quedando recogidas en dicha base de datos. Posteriormente, la optimización englobará bajo el mismo diseño al conjunto de localizaciones, catenarias, autotransformadores y demás elementos de la electrificación que hagan tomar un valor mínimo a la función objetivo. Fig. 7.1. Procedimiento de optimización de la electrificación Además, los diseños candidatos serán probados en escenarios tipo, para simular la/s situación/es de funcionamiento en modo normal y degradado en los que operará la electrificación. 7.6 REPOSITORIO DE CATENARIAS Para generar el repositorio de catenarias se realiza un barrido de todas las posibles combinaciones de conductores y en distintas posiciones, incluyendo también la opción de no colocar algún/os conductor/es. Además, si se diseña con los dos sistemas de alimentación se generan dos repositorios, uno para el sistema monotensión y otro para el bitensión. El criterio de selección empleado en el barrido de las catenarias es el de menor impedancia (de los conductores individualmente) y menor coste de la misma (coste global). A las catenarias que cumplen estos criterios se les denomina dominantes y a las que no, dominadas. En la fig. 7.2 puede verse como las catenarias 4 y 5 aún sin ser dominadas (por definición) son menos recomendables que la catenaria dominante, lo cual también es considerado. Para ello, se utilizan los criterios de selección que se muestran en 33
- 34. la fig. 7.3. A continuación, para cada catenaria dominante se calcula la matriz de impedancias y los costes fijo por subsector y por unidad de longitud. Fig. 7.2. Catenaria dominantes y dominadas Fig. 7.3. Criterio s para la selección de catenarias en el barrido de la base de datos Por último, un repositorio de mayor tamaño aumenta el tiempo computacional de la optimización, y uno más pequeño resta grados de libertad y posibilidades de encontrar la solución óptima. Por tanto, el tamaño del repositorio debe respetar este compromiso y ser además una muestra de los distintos tipos de catenaria dominante de la base de datos. 7.7 POSICIÓN RELATIVA DE LOS CONDUCTORES Las catenarias están compuesta por conductores de distinto tipo (en el sistema bitensión existen además los llamados conductores negativos), y la posición relativa entre ellos depende del diseño de los apoyos. Mientras que las posiciones de los hilos de contacto y de los sustentadores vienen fijadas, [normas internacionales UIC]; las del resto de conductores no, y pueden variarse siempre que cumplan las condiciones de aislamiento y apoyo [Reglamento de líneas eléctricas aéreas de alta tensión]. Modificando la posición relativa de los conductores (en especial en el sistema bitensión), se puede reducir el acoplamiento magnético y la caída de tensión global de la línea (alejando los conductores positivos entre ellos y acercando los conductores positivos a los negativos). 34
- 35. 7.8 DISTRIBUCIÓN DE LOS AUTOTRANSFORMADORES El sistema bitensión (ó 2x25 kv) necesita transformar la tensión de transporte a la tensión del pantógrafo; tarea que realiza los autotransformadores. Al igual que los transformadores de las subestaciones, los autotransformadores también producen una caída de tensión. Sin embargo, esta caída de tensión sólo es acumulativa dentro de cada celda, anulándose la caída de tensión de la celda genérica i en el resto de celdas. Además, conforme disminuye la distancia entre autotransformadores menor es la caída de tensión en las celdas debido a los mismos. Esto hace interesante, a priori; reducir la distancia entre autotransformadores, aunque es necesario cuantificar y verificar la factibilidad del coste adicional que supone aumentar su número. Analizando la caída de tensión frente a la reducción de la impedancia de la línea, fig. 5.4; puede comprobarse que sólo en excepcionales ocasiones es factible reducir la distancia entre autotransformadores, pues generalmente el coste adicional es superior a la reducción de la caída de tensión. En aquellos casos que se requiera reducir la caída de tensión, resulta más interesante invertir en otro tipo de catenaria en lugar de aumentar el número de autotransformadores. Además, con esta inversión la reducción de la caída de tensión se amplía a toda la línea y no sólo a una celda. Sin embargo, en ocasiones es factible reducir la distancia entre autotransformadores en una zona/subsector para reducir la caída de tensión de esa zona/subsector, si ésta es excesiva en comparación al resto de la línea (sin ser necesario reducir la caída de tensión en el resto de la línea). Fig. 7.4. Coste de la electrificación -impedancia de línea y número mínimo de autotransformadores Respecto al número mínimo, este debe ser de al menos un autotransformador. Para que todo el subsector esté alimentado por el sistema bitensión, (único autotransformador); este deberá estar colocado al final del subsector. De no ser así, el segmento comprendido entre autotransformador y final del subsector estará alimentado mediante el sistema monotensión, fig. 7.4. 7.9 LOCALIZACIÓN DE LOS AUTOTRANSFORMADORES La localización de los autotransformadores influye directamente en la caída de tensión, que es mayor conforme aumenta la distancia a la subestación de alimentación. Puesto que las situaciones más desfavorables, y que determinan el diseño; suelen ser las 35
- 36. del modo de funcionamiento degradado por fallo de subestación, la concentración de autotransformadores se aconseja mayor en las cercanías de las subestaciones. Aunque las situaciones degradadas son las más desfavorables normalmente, no lo son siempre y por ello es preciso realizar un barrido para encontrar la situación más crítica; que no sólo depende del modo de funcionamiento, sino también del instante y de la explotación de la línea. Este hecho aumenta considerablemente el costo computacional, y por ello el modelo aquí desarrollado toma constante la distancia entre autotransformadores; lo cual es un criterio de diseño muy común en la electrificación ferroviaria. Para un diseño refinado, puede realizarse una simulación con la que encontrar la situación más crítica y diseñar sobre ella la electrificación; reduciendo de esta manera el costo computacional. 7.10 RELACIÓN DE TRANSFORMACIÓN EMPLEADA A pesar de ser una variable no muy usada, la relación de transformación modifica la caída de tensión del subsector completo y mediante ella puede aumentarse la longitud del subsector. Este hecho repercute directamente en el diseño y elección de las subestaciones, catenarias, apoyos, autotransformadores, etc. Aumentando la tensión de alimentación negativa se consigue el hecho observable en la fig. 7.5. Fig. 7.5. Reducción de la caída de tensión con ten siones de alimentación negativas mayores Por otra parte, al diseñar la electrificación se considera posibles ampliaciones de la línea en un futuro y normalmente se diseña para la tensión normalizada inmediatamente superior a la necesaria para el diseño en sí. De esta manera, queda un aislamiento remanente en la instalación que no se aprovecha, siendo posible aumentar la tensión de alimentación hasta ese límite y reducir por tanto la caída de tensión global. 7.11 FORMULACIÓN DEL PROBLEMA DE OPTIMIZACIÓN El problema de optimización tiene como objetivo la minimización de la variable COSTE, función objetivo; cumpliendo a la vez un conjunto de restricciones. 36
- 37. 7.11.1 Función objetivo A continuación la expresión de la función objetivo, (7.1). ; (7.1) 7.11.2 Restricciones 7.11.2.1 Restricciones de magnitudes físicas del problema, (7.2) a (7.14). Restricciones de la caída de tensión máxima. -Modo de funcionamiento normal, (7.2). ; (7,2) -Modo de funcionamiento degradado (indisponibilidad de transformador, en aquellos elementos i), (7.3). ; (7.3) -Modo de funcionamiento degradado (indisponibilidad de subestación, en aquellos elementos i), (7.4) y (7.5). ; (7.4) ; (7.5) Potencia máxima suministrada por un transformador. -Modo de funcionamiento normal, (7.6) y (7.8). ; (7.6) -Modo de funcionamiento degradado (indisponibilidad de transformador, en aquellos elementos i), (7.7) y (7.8). 37
- 38. ; (7.7) -Modo de funcionamiento degradado (indisponibilidad de subestación, en aquellos elementos i), (7.8). ; (7.8) Cobertura de toda la línea; (longitud a electrificar), (7.9). ; (7.9) Activación de un sector, (7.10). ; (7.10) donde dX es la longitud mínima de un subsector para ser considerado activo. Variables crecientes, (7.11) y (7.12). ; (7.11) ZONA(i,z-1)debe ser creciente en z excepto si el elemento i no se usa, (7.12). ; (7.12) Variables decrecientes, (7.13). ; (7.13) Variables positivas, (7.14). 38
- 39. ; (7.14) 7.11.2.2 Restricciones necesarias para incorporar la lógica del problema. Ubicación de los trenes, (7.15) y (7.16). ; (7.15) ; (7.16) Distancia de un tren al inicio y final del subsector i, (7.17) y (7.18). ; (7.17) ; (7.18) Longitud del subsector inmediatamente anterior y posterior al subsector i donde se encuentra el tren, (7.19) y (7.20). ; (7.19) ; (7.20) Variables auxiliares DISTiniCAT(sc,t,i,c) y DISTfinCAT(sc,t,i,c), (7.21) y (7.22). 39
- 40. ; (7.21) ; (7.22) Longitud del subsector inmediatamente anterior y posterior al subsector i donde se encuentra el tren en caso que se use una catenaria de tipo c, (7.23) y (7.24). ; (7.23) ; (7.24) Caídas de tensión, (7.25) a (7.27). ; (7.25) ; (7.26) ; (7.27) Desvíos de tensión, (7.28). ; (7.28) Ubicación de las subestaciones, (7.29). ; (7.29) Variables auxiliares ZONA(i,z), (7.30). ; (7.30) Longitud total, (7.31). 40
- 41. ; (7.31) 7.12 TABLA-RESUMEN DE VARIABLES Tipo de Variable Descripción variable Entera LONG(i) positiva Longitud del subsector i Entera LONGCAT(i,c) positiva Longitud de catenaria del tipo c empleada en el subsector i Distancia entre el tren t y el final del subsector i. Positiva si el DISTESTA(sc,t,i) Entera tren se encuentra en un P.K superior y negativa en caso contrario Entera Distancia entre el tren t del escenario sc y el principio del DISTini(sc,t,i) positiva subsector i Entera DISTfin(sc,t,i) positiva Distancia entre el tren t del escenario sc y el final del subsector i Entera Longitud del subsector inmediatamente anterior al subsector i DIST2ini(sc,t,i) positiva donde se encuentra el tren t para el escenario sc Entera Longitud del subsector inmediatamente posterior al subsector i DIST2fin(sc,t,i) positiva donde se encuentra el tren t para el escenario sc Entera Toma el mismo valor que DISTini(sc,t,i) en caso de que se use la DISTiniCAT(sc,t,i,c) positiva catenaria c en el subsector i y 0 en los demás casos. Entera Toma el mismo valor que DISTfin(sc,t,i) en caso de que se use la DISTfinCAT(sc,t,i,c) positiva catenaria c en el subsector i y 0 en los demás casos. Entera Toma el mismo valor que DIST2ini(sc,t,i) en caso de que se use la DIST2iniCAT(sc,t,i,c) positiva catenaria c en el subsector i y 0 en los demás casos. Entera Toma el mismo valor que DIST2fin(sc,t,i) en caso de que se use la DIST2finCAT(sc,t,i,c) positiva catenaria c en el subsector i y 0 en los demás casos. Binaria Toma el valor 1 si el tren t del escenario sc se encuentra en el ESTA(sc,t,i) creciente subsector I o anteriores (i-1, i-2, …) y 0 en los demás casos Binaria Toma el valor 1 si se emplea la catenaria c en el subsector i o de CAT(i,c) decreciente menor impedancia Binaria SEC(i) decreciente Toma valor 1 si se usa un determinado subsector i y 0 si no se usa Caída de tensión producida en la catenaria por los trenes del VCini(sc,i) Positiva escenario sc que se encuentran en el subsector i, siendo la alimentación desde el principio del subsector i Caída de tensión producida en la catenaria por los trenes del VCfin(sc,i) Positiva escenario sc que se encuentran en el subsector i, siendo la alimentación desde el final del subsector i Caída de tensión producida en la catenaria por los trenes del VC2ini(sc,i) Positiva escenario sc que se encuentran en los subsectores i e i+1, siendo la alimentación desde el principio del subsector i Caída de tensión producida en la catenaria por los trenes del VC2fin(sc,i) Positiva escenario sc que se encuentran en los subsectores i e i+1, siendo la alimentación desde el final del subsector i Entera Caída de tensión en una subestación por los trenes del escenario VSE(sc,i) positiva sc que se encuentran en el subsector i Entera Desvío de tensiones producido por el conjunto de trenes del VDESV(sc,i) positiva scenario sc que se encuentran en el subsector i DISTZONA(i,z) Entera Distancia entre el final del subsector i y el final de la zona z. 41
- 42. Positiva si se encuentra en un P.K superior y negativo en caso contrario Binaria Toma el valor 1 si el final del subsector i se encuentra en la zona ZONA(i,z) creciente z o anteriores (z-1, z-2, …) y 0 en los demás casos Entera COSTE positiva Coste de la instalación. Es la función objetivo Entera CCAT(c) positiva Coste de la catenaria por unidad de longitud Entera CFIJO(c) positiva Coste por subsector ENZONA(i,z) Auxiliar - Entera ITREN(sc,t) positiva Corriente que consume en el escenario sc el tren t Entera ZCAT(c) positiva Impedancia de la catenaria c ENSS(sc,t,i) Auxiliar - Entera STREN(sc,t) positiva Potencia consumida en el escenario sc por el tren t Entera PZONA(z) positiva Potencia máxima de la zona z Constante dX positiva Longitud mínima de un subsector i para ser considerado activo Entera XTREN(sc,t) positiva P.K. en el que se encuentra el tren t en el escenario sc Entera L positiva Longitud de la línea K Constante Parámetro ε Constante Número arbitrariamente pequeño Entera ZSE positiva Impedancia de las subestaciones Entera FINZONA(z) positiva P.K. del final de una zona Fig. 7.6. Tabla resumen de variables del capítulo 7 Nota: i, sc, t, c y z son índices que corresponden a los subsectores, escenarios, trenes, catenarias y zonas distintas empleadas en el problema de optimización. 42