1. 1
Obs: pentru vizualizarea planului general al cursului activaţi View/Document Map
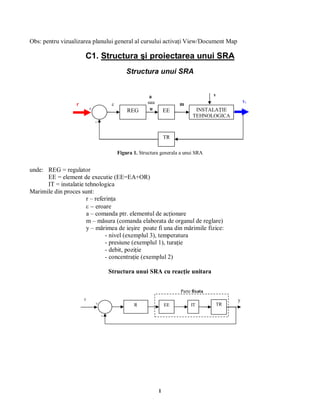
C1. Structura şi proiectarea unui SRA
Structura unui SRA
Figura 1. Structura generala a unui SRA
unde: REG = regulator
EE = element de executie (EE=EA+OR)
IT = instalatie tehnologica
Marimile din proces sunt:
r ± referinţa
Ieroare
a ± comanda ptr. elementul de acţionare
m ± măsura (comanda elaborata de organul de reglare)
y ± mărimea de ieşire poate fi una din mărimile fizice:
- nivel (exemplul 3), temperatura
- presiune (exemplul 1), turaţie
- debit, poziţie
- concentraţie (exemplul 2)
Structura unui SRA cu reacţie unitara
R EE IT
r
+
-
y
TR
Parte fixata
REG EE INSTALAŢIE
TEHNOLOGICA
TR
r
+
-
I
a
sau
u
m
v
Y1
4. 1
( )
1 1
f
f n
i
K
H s
T T s7
!
—
sau în prezenta unui pol în origine şi a timpului mort:
5.
6. 1
( )
1 1
s
f
f n
i
K e
H s
s T T s
X
7
™
!
—
unde:
Kf - reprezintă coeficientul de transfer al parţii fixate
Ti ± reprezintă constantele dominante (mari) de timp
T™ - reprezintă suma constantelor de timp parazite care sunt mult mai mici decât cele dominante.
_ a
1
min
10
i
7 !
X - reprezintă timpul mort al procesului
Valoarea constantelor Ti determina tipul procesului care poate fi lent sau rapid. Pentru iT 10 sec
procesum este rapid iar pentru 10 seciT procesul este lent.
In general, funcţia de transfer a parţii fixate, care include sistemul de automatizat şi parametrii
corespunzători traductorului şi elementelor care comandă sursa de energie care intervine în proces
(element de execuţie) poate avea forma:
1
-1 0
1
1 0
....
( )
...
m m
sm m
f n n
n
b s b s b¡
s e
s a s a
X
! ™
Exemplul 1: y = presiune
R Hf(s) = PF
Proces fizic
r
+
-
y(t)
Model matematic
u(t)I(t)
7. 3
SA=sursa de alimentare
Exemplul 2: y = concentraţie
TC = trad. de concentraţie
Exemplul 3: y = nivel
y = X % concentraţie
A în B
REG
TC =
trad.
A B
referinţa
% concentr.
EE
P =
constant
0 ÷ 1
barr
Trad. de
presiune
REG
(electronic)referinţa
SA
I
P
Consum
variabil
manometru
ventil
y = presiune
(convertor electro-pneumatic)
EE
8. 4
QA = debit de alimentare
QE = debit de ieşire
TL = traductor de nivel
Proiectarea unui SRA
Proiectarea unui SRA presupune rezolvarea unor probleme legate de alegerea şi dimensionarea
elementelor componente precum şi interconectarea lor aşa încât sa fie satisfăcute performanţele impuse
sistemului de reglat.
Prima etapa a proiectării consta în identificarea obiectivelor propuse a fi realizate în conformitate cu
tipul procesului şi condiţiile/restricţiile de funcţionare ale acestuia.
A doua etapa consta în identificarea soluţiilor optimale pentru definirea legii de reglare implicit a
regulatorului corespunzător. Odată determinata legea de reglare se procedează la alegerea tipului de
regulator care o poate materializa.
Criterii de alegere a elementelor de execuţie
In cadrul sistemelor automate, elementele de execuţie şi traductoarele constituie elementele de cuplare
a regulatorului la procesul supus automatizării.
R
y = (h
I
P
QA
QE
TL
R0 = h0
(convertor electro-pneumatic)
EE
Regulator
ProcesTR EE
Referinţa
y m
Perturbaţii
Sursa de
energie
u
9. 5
Elementele de execuţie EE sunt generatoare de cuplu sau forte cu viteza precizata, prin exploatarea
energiei exterioare comandate de semnalele de comanda trimise de regulator. Prin intermediul sau se
acţionează asupra surselor energetice ale procesului tehnologic, a căror comanda este corelata cu
cerinţele de variaţie a mărimii de la ieşirea procesului impuse de legea de reglare a regulatorului.
Un element de execuţie este format din partea motoare propriu-zisa (elemente de acţionare) şi organul
de execuţie sau organul de reglare specific procesului tehnologic.
Elementul de acţionare EA, transforma mărimea de comanda u intr-o mărime motoare de execuţie însa
în conformitate cu natura fizica şi nivelul energetic al organului de reglare OR.
Organul de reglare OR, acţionează direct asupra procesului tehnologic prin intermediul mărimii de
execuţie m.
EE = element de execuţie
EA = element de acţionare
OR = organul de execuţie sau organul de reglare
Clasificarea EE
Ź după natura energiei utilizate in:
o EE pneumatice
o EE hidraulice
o EE electrice
Ź după modul de acţionare :
o EE cu acţiune continua
o EE bipoziţionale
o EE de tip pas cu pas.
Tipuri de elemente de acţionare EA:
EA pneumatice:
- EA cu membrana cu simplu şi dublu efect,
- EA cu piston cu simplu sau dublu efect pentru mişcări de translaţie
- EA cu palete pentru mişcări unghiulare
Ele pot fi comandate de regulatoare pneumatice şi de regulatoare electronice. Daca regulatorul este
electronic, cuplarea intre regulator şi elementul de execuţie se realizează prin intermediul unui
convertor electro-pneumatic.
EA de acţionare hidraulica:
- EA cu piston cu simplu sau dublu efect ptr. deplasări liniare
- EA cu pistoane radiale ptr. deplasări unghiulare
EA de acţionare electrica:
- Motoare electrice de cc
- Motoare asincrone monofazate, bifazate şi trifazate
- Motoare pas cu pas ptr. acţionarea discreta a organelor de reglare
EE EA OR= +
10. 6
Tipuri de organe de reglare OR:
După natura energiei reglate organele de reglare pot fi:
OR mecanice
OR electrice
După tipul procesului OR pot fi:
OR pentru reglarea debitelor
OR ptr. reglarea unor mărimi electrice sau neelectrice
Cele mai frecvente OR sunt robinetele de reglare a unor debite de fluid. Ele au ca mărime de intrare
mărimea mecanica (deplasare) generata de elementul de acţionare iar ca mărime de ieşire un debit care
se introduce sau evacuează din instalaţie.
Ex: OR : organ de reglare = robinet
Acţionarea acestuia = pneumatica, hidraulica sau electrica EA pneumatic
Proces supus automatizării (PF)
este definit în schema de reglare prin modelul matematic corespunzător. Aceasta este una din cele mai
dificile etape în proiectarea unui SRA.
Definirea modelului matematic corespunzător procesului de automatizat presupune:
identificarea mărimilor de intrare şi de ieşire (u(t) respectiv y(t))
determinarea perturbaţiilor care acţionează în sistem (v(t))
stabilirea observabilităţii sistemului
determinarea variabilelor de stare de care depind direct mărimile de ieşire daca acestea sunt
măsurabile
precizarea restricţiilor funcţionale ale procesului
procesele complexe se vor descompune în subsisteme şi se vor identifica modelele
matematice corespunzătoare acestora
Modelele matematice sunt de tipul:
Ź intrare ±stare ± ieşire ĺ ecuaţii de stare
Ź intrare ± ieşire ĺ funcţie de transfer
Modelul Intrare-stare-ieşire (Ecuaţii de stare)
dx
Ax Bu
dt
y Cx Du
®
! ±
¯
± ! °
unde :
u ± este vectorul intrărilor, cu nu componente
PF
Proces fizic
y(t)
Model matematic
u(t)
v(t)
11. 7
x ± este vectorul variabilelor de stare cu nx componente
y ± este vectorul ieşirilor, cu ny componente
A,B,¢, şi D sunt matrice de dimensiuni : dim( ) ( )x xA n n! v ,
dim( ) ( )x uB n n! v ,dim( ) ( )y xC n n! v , dim( ) ( )y uD n n! v .
Modelul intrare ± ieşire (Funcţia de transfer)
15. 00
( ) ( ) lim ( ) ( )
T
st st
T
L f t F s f t e dt f t e dt
II
g
pg
p
! ! ™ !´ ´
unde s este o variabila complexa definita prin s jW [! ™ , unde W şi [ sunt variabile reale iar
1j ! .
Corelat cu reprezentarea prin matricele de stare, se poate scrie:
16.
17. 1
H s £ s I A B D
! ™ ™ .
O forma uzuala a funcţiei de transfer a unui sistem este aceea în care se pun în evidenta coeficientul de
transfer în regim staţionar 0K precum şi numărul polilor în origine E :
0 1
2
( )
( )
( )
K P s¤
s
P ssE
! ™
unde polinoamele 1P şi 2P au ultimul termen unu ( 1 2(0) (0) 1P P! ! ).
Cea de-a patra forma pune în evidenta polii funcţiei de transfer respectiv zerourile polinoamelor 1P şi
2P (admitem ca aceştia sunt simpli):
18.
19.
20.
21.
22.
23. 1 2
0
1 2
....
( )
..
m m
n n
s z s z s z bK
H s unde K K
s p s p s p asE
! ™ !
Modelele matematice ale elementelor tip ale unui SRA sunt:
Tipul elementului Ecuaţia diferenţiala Funcţia de transfer
Element proporţional 0( ) ( )y t K u t! ™ 0( )H s K!
Element de întârziere
de ordinul întâi 0 ( )
dy
T y K u t
dt
™ ! ™ 0
( )
1
K
H s
Ts
!
Element oscilant de
ordinul lI
2
2 2
02
2 ( )n n n
d y dy
y K u t
dtdt
[ [ [ ! ™ ™
2
0
2 2
( )
2
n
n n
K
H s
s s
[
[ [
™
!
Element de întârziere
de ordinul II
24. 2
1 2 1 2 02
( )
d y dy
T T T T y K u t
dtdt
™ ! ™
25.
26. 0
1 2
( )
1 1
K
H s
T s T s
!
Element cu timp mort ( ) ( )y t u t X! ( ) s
H s K e X
! ™
35. 9
C2. Criteriile de performanta impuse unui SRA
Tipuri de SRA
( ) ( )d R FH H s H s! ™
0
( )
1 ( )
d
d
H s
H
H s
!
0
( ) ( )
( )
1 ( ) ( )
R
¥
R
¥
H s H s
H s
H s H s
™
!
™
funcţia de transfer a sistemului cu reacţie unitara
in raport cu referinţa r .
.........................................................................................................................................................
0 1
( )
( )
1 ( ) ( )
F
v
R F
H s
H s
H s H s
!
™
¦ funcţia de transfer în raport cu perturbaţia v1
.........................................................................................................................................................
0 2
1
( )
1 ( ) ( )
v
R F
H s
H s H s
!
™
funcţia de transfer în raport cu perturbaţia v2
.........................................................................................................................................................
HR(s) HF(s)
v2
+
-
y
HR(s)
HF(s)
v1
+
-
y
HR(s) HF(s)
r
+
-
I u
y
+
v1 v2
+
™ ™
36. 10
0 0 1 0 2( ) ( ) ( ) ( ) 1( ) ( ) 2( )v vY s H s r s H s v s H s v s! ™ ™ ™ evoluţia ieşirii când asupra
sistemului acţionează atât referinţa
cat şi semnale perturbatoare
Referinta poate fi :
- constanta (SRA de stabilizare)
- variabila (SRA de urmarire)
In functie de acesta referinta un sistem SRA poate fi :
SRA de stabilizare presupune proiectarea unui SRA care elimina perturbaţiile în condiţiile
menţinerii constante a semnalului de referinţa .
SRA de urmărire a referinţei presupune modificarea frecventa a referinţei cu neglijarea
perturbaţiilor.
In general se urmăreşte proiectarea unui SRA care sa aibă performanţe bune în raport cu referinţa şi
eliminarea efectelor perturbaţiilor (rejecţia perturbaţiilor).
In functie de tipul de acţiune a regulatorului:
Performanţele generale unui sistem sunt definite pentru regimul tranzitoriu şi cel staţionar:
Performanţele reg. tranzitoriu
Performanţele reg. Staţionar
Criteriile generale de performanta ale unui sistem sunt determinate prin
analiza raspunsului in timp:
Ź răspuns tranzitoriu:
suprareglaj W
timp tranzitoriu tt (durata regimului tranzitoriu)
factor de amortizare ^
timp de creştere tc
timp de întârziere ti
si prin analiza raspunsului in frecventa:
Ź performanţele în domeniul frecventelor :
stabilitatea sistemului
SRA
de stabilizare
(referinţa nu se modifica)
de urmărire a referinţei
(cu modificarea frecventa a referinţei)
SRA
continue discrete
37. 11
precizia în regim staţionar sau eroarea staţionara Ist
banda de frecventa [
marginea de faza MJ
marginea de amplitudine (câştig) Mc
pulsaţia de rezonanta [R
valoarea de vârf a modulului Mv
Criteriile de performanta se pot defini singular sau ca pachet de cerinţe deci ca şi criterii
integrale. Criteriile integrale acoperă mai bine performanţele impuse unui sistem la variaţii mari ale
intrării dar şi la variaţii ale perturbaţiilor.
Criterii de performanta integrale uzuale utilizate în proiectarea unui SRA pot avea diferite expresii în
funcţie de performanţele ce se impun unui SRA.
Criteriile de performanta integrale se exprima prin indicii de performanta (IP) al sistemului.
Ex: răspunsul aperiodic la intrare treapta unitara este mult îmbunătăţit cu cat aria haşurata este mai
mica:
38. 0
0
min.refIP y y dt dtI
g
g
! ! !´ ´
Ex: răspunsul oscilant este îmbunătăţit daca:
0
min.IP dtI
§
! !´ sau
0
min.2
IP dtI
¨
! !´
Obs: criteriile integrale se aplica cu succes numai în cazul sistemelor cu eroare staţionară nulă şi nu
oferă informaţii despre regimul staţionar (altfel valoarea integralelor ar fi infinita).
Răspunsul în timp al sistemelor SISO cu parametrii invarianţi în timp
Răspunsul indicial al unui sistem de ordinul I (răspunsul ieşirii la treapta)
y
t
yref
+
y
y
yref
t
-
- -
+ + +
42. 13
Răspunsul indicial al unui sistem de ordinul I cu reacţie unitara
Performanţele sistemului sunt indicate de valoarea duratei regimului tranzitoriu T. Acesta
valoare este mai mica daca sistemul este cu reacţie unitara negativa deci sistemul îşi
îmbunătăţeşte răspunsul prin închiderea buclei de reacţie.
Răspunsul indicial al unui sistem de ordinul II (răspunsul la treapta unitara)
Răspunsul indicial al unui sistem oscilant de ordinul II pentru diferite valori ale lui
h(t)
t
0 !
1
1
1
2
2 2
( )
2
n
n n
H s
s s
[
[ [
!
T2
1
K
y(t)
( )sty t y Kg! !
u(t)=r(t)=1
stI
t
( )
1
K
H s
Ts
!
T1
Rasp. sist. cu reacţie
Rasp. sist. fără reacţie
U(s) Y(s)
1
s
2
2 2
( )
2
n
n n
H s
s s
[
[ [
!
44. 2
1,2 1n np j[ [ ! s ™ ™
Obs: pentru ^ 1 , rădăcinile ecuaţiei caracteristice sunt reale şi diferite, componenta tranzitorie fiind
alcătuita din doua exponenţiale. Răspunsul în acest caz este supra-amortizat.
Reprezentarea polilor sistemului de ordinului II, sunt o buna exemplificare pentru verificarea criteriului
general de stabilitate a sistemelor (prezenta polilor în semiplanul stâng al planului complex indica un
sistem stabil).
Performanţele unui SA în regim tranzitoriu
Suprareglajul sau abaterea dinamica maxima W este diferenţa intre valoarea maxima a ieşirii şi
valoarea de regim staţionar: max sty yW ! . Se poate defini procentual ca reprezentând
? Amax
100 %st
st
y y
y
W
! .
01
răspuns sub-amortizat
=1
răspuns critic amortizat
1
răspuns
supra- amortizat
=0 răspuns neamortizat
0
răspuns instabil
Reprezentarea rădăcinilor ecuaţiei caracteristice în
planul complex pentru diverse valori ale lui
yr
W
1
1,05
0,95
0,5
0,05
tc
ti tt
Ist
46. = fW
Daca se impune impW We imp u
Durata procesului tranzitoriu tt este sensibil influenţata de pulsaţia naturala n[ . Se considera
ca regimul tranzitoriu este încheiat odată cu atingerea şi stabilizarea valorii de răspuns a sistemului
în banda 0,05 sty( ! s ™ . Se obţine în acest caz o valoare a tt de :
48. ,t nt f [ !
Timpul de creştere ct reprezintă intervalul de timp în care mărimea de ieşire evoluează în
domeniul ? A0,05 ,0,95st sty y .
Timpul de întârziere este definit ca fiind timpul necesar ca mărimea de ieşire sa crească de la
zero la 0,5 sty
Răspunsul în frecventa al sistemelor LTI
Reprezentarea în frecventa a unui sistem se obţine prin aplicarea la intrare a unui semnal sinusoidal de
frecventa
2
f
[
T
! ,
49. sinr A t[! . în cazul sistemelor liniare cu parametrii invariabili în timp
(sisteme LTI) aceasta determina apariţia unui semnal de sinusoidal cu amplitudine şi faza diferite fata
de semnalul de intrare :
1
W
^1
0
Wimp
^imp
50. 16
Deoarece raportul dintre cele doua amplitudini ale semnalului de intrare şi al celui de ieşire este chiar
modul funcţiei de transfer a sistemului pentru s=j[, rezultă ca matematic pentru a aprecia răspunsul în
frecventa al unui sistem definit prin funcţia de transfer H(s), se înlocuieşte s=j[ în expresia funcţiei de
transfer si pentru diverse valori ale pulsaţiei [ se determină modulul şi argumentul funcţiei.
Aprecierea răspunsului în frecventa a sistemului automat H(s) este descris prin caracteristicile de
frecventa:
caracteristica amplitudine-faza sau locul de transfer(hodograful funcţiei) : reprezentarea
numărului complex H(s) în planul complex ( ? A ? A
51. Re ( ) ,Im ( )H s H s , prin modulul ( )H s şi
( )H s’ . Aceasta caracteristica se trasează pentru sistemul deschis, fiind utila şi în aprecierea
stabilităţii sistemului închis cu reacţie unitara negativa (criteriul Nyquist)
caracteristici logaritmice: caracteristica amplitudine-pulsaţie şi fază-pulsaţie cunoscute sub
numele de caracteristici Bodé.
Prin caracteristicile de frecventa pot fi definite câteva din performanţele unui sistem cu reglare
automată : stabilitatea relativa a sistemului, banda de frecventa, frecventa de rezonanta.
Precizam ca pentru trasarea locului de transfer, daca funcţia de transfer a sistemului deschis este de
forma
10
2
( )
( )
( )
m
d
n
P sK
H s
P ssE
! ™ , se pot determina asimptotele locului de transfer în punctele
corespunzatoare frecventelor inalte şi joase (Figura 2). Cunoaşterea acestor asimptote permite trasarea
hodografului funcţiei de transfer a sistemului deschis si aprecierea stabilităţii sistemului închis conform
criteriului de stabilitate Nyquist.
Pe de alta parte, se poate explica uşor cum este influenţata stabilitatea sistemului închis prin alocarea
unui pol sau a unui zero în sistemul deschis. Un sistem deschis de ordinul II, la frecvente inalte are
asimptota corespunzatoare lui ș!prin adăugarea unui pol, se ajunge la un sistem de ordinul III care
are asimptota ș!la frecvente inalte. Aceasta intersectează axa reala negativa şi risca sa ocolească
punctul (-1, j0) prin stânga acestuia. în mod similar, adăugarea unui zero în sistemul deschis, scade ș
ceea ce scade şi riscul de instabilitate a sistemului închis.
Obs: U reprezintă excesul de poli fata de zerouri în funcţia dH .
intrare ieşire
58. 17
E reprezintă numărul de poli în origine ai dH
10
2
( )
( ) ;
( )
-
m
d
n
P sK
H s
P ss
n m
E
U E
! ™
!
Figura 2. Asimptotele locului de transfer pentru
a) frecvente joase, b) frecvente inalte
K
E!
0[ p
E!
E!
E!
Im
Re
ș!
ș!
ș!
ș!
Im
Re
[ p g
a) b)
59. 18
Performanţele unui SA în regim staţionar
Stabilitatea sistemului deschis: Conform criteriului de stabilitate al unui sistem, condiţia
necesara şi suficienta ca un sistem sa fie stabil este ca polii funcţiei de transfer H(s) (rădăcinile
ecuaţiei caracteristice) sa fie situaţi în semiplanul stâng al planului complex.
Stabilitatea sistemului închis se defineşte prin interpretarea locului de transfer al sist. deschis,
din punctul de vedere al criteriului de stabilitate Nyquist sau al caracteristicilor de frecventa în
reprezentare logaritmica. Criteriu Nyquist permite interpretarea stabilităţii sistemului în stare
închisă daca se cunoaşte locul de transfer (sau hodograful funcţiei) al sistemului în stare deschisa.
Criteriul Nyquist generalizat : daca sistemul deschis este instabil (deci funcţia ( )dH s are p poli în
semiplanul drept al planului complex (W, j[)), condiţia necesara şi suficienta ca un sistem LTI
continuu sa fie stabil în stare închisa, este ca punctul (-1, j0) sa fie înconjurat în sens trigonometric de
caracteristica amplitudine-faza a sistemului deschis (trasata pentru [ variind de la -g la +g), de un
număr de ori egal cu numărul polilor situaţi în semiplanul drept al funcţiei de transfer a sistemului
închis.
Criteriul simplificat este o particularizare a celui general şi porneşte de la ipoteza sistemului LTI stabil
în stare deschisa (deci numărul polilor din semiplanul drept al planului complex (W, j[) este 0).
Criteriul Nyquist simplificat : daca sistemul deschis este stabil (deci ecuaţia caracteristica are toţi polii
în semiplanul stâng al planului complex), condiţia necesara şi suficienta ca sistemul închis sa fie stabil
este ca locul de transfer sau caracteristica amplitudine-faza, pentru valori crescătoare ale pulsaţiei ([
=0«.+g) sa lase în stânga punctul critic de coordonate (-1, j0) sau acest punct sa nu se găsească în
interiorul caracteristicii trasata cu ambele ramuri când [ variază de la -g la +g.
H(s)
U(s) Y(s)
Hd(s)
I(s) Y(s)r(s)
60. 19
1 ± sistem stabil
2 ± sistem la limita de stabilitate
3 ± sistem instabil
Din reprezentarea grafica rezultă ca din doua sisteme stabile în stare deschisa, numai sistemul 1 este
stabil în stare închisă deoarece lasă în stânga punctul (-1, j0). Punctele importante de apreciere a
gradului de stabilitate sunt cele în care sistemul are amplitudinea (modulul funcţiei de transfer) 1 şi
cel în care faza N este 180°. Pentru aceste puncte se cunosc pulsaţiile respective: [c şi [T(hodograful
se trasează prin aplicarea la intrarea unui sistem deschis a unui semnal sinusoidal de frecventa
(pulsaţie) variind de la 0 la +g) şi amplitudinile de răspuns care reprezintă matematic modulul funcţiei
de transfer în punctele respective. Se definesc următoarele noţiuni:
c
d ʌ
1
( Ȧ )
Margine de câştig sau de amplitudine
61. d c180 arg ( )N [ Margine de faza
unde: T[ este pulsaţia pentru care faza sistemului este 0
180N !
c[ este pulsaţia la care modulul vectorului
62.
63. H s G s™ este 1.
Pentru un sistem stabil Mc 1 şi MN 0.
Cu cat Mc şi MN sunt mai mari cu atât gradul de stabilitate al sistemului automat este mai mare. Cu
alte cuvinte, cu cat locul de transfer este mai aproape de origine, lăsând mult în stânga punctul (-1, j0),
cu atât sistemul este mai stabil.
Im(HG(s)
N
(|HG([c)|=1)
[c
[T(-1, j0)
13
2
’ |HG([ʌ)|=ʌ
[= +g
[= +0
Re(HG(s))
64. 20
Caracteristicile amplitudine-pulsaţie şi faza-pulsaţie
Diagrame Bodé
In cele doua caracteristici poziţia relativa a lui [c şi [Tdetermina stabilitatea sistemului:
1. [c [T sistem stabil
2. [c [T sistem instabil
3. [c = [T sistem la limita de stabilitate
Eroarea staţionara stI , în cazul sistemelor deschise, se calculează ca diferenţa intre valoarea
de referinţa
*
y r! şi valoarea staţionara yst a mărimii de ieşire:
*
1 0st st sty y yI ! ! ! daca 0 1K ! deoarece lim ( ) 1st
t
y y t
pg
! ! .
Eroarea staţionara stI , în cazul sistemelor închise
Consideram forma generala a funcţiei de transfer a caii directe:
( )
( )
( )
d q
K P s
H s
s Q s
™
!
™
unde:
q = reprezintă numărul de poli în origine,
K = coeficientul de transfer în regim staţionar
|H(s)|=A([)|dB = 20 log10|H(s)|
log [
scara logaritmica[c
[T
-1800
log [
scara logaritmica
r yI
H(s)
( )
( )
( )
d q
K P s
H s
s Q s
™
!
™
r +
-
yI
65. 21
P(s) şi Q(s) sunt polinoame cu ultimul termen 1: P(0)=Q(0)=1.
Pentru sistemul închis cu reacţie unitara, se poate defini eroarea staţionara ca fiind :
70. 0 0
( ) ( )lim lim limst
t s s
t s s s R s Y sI I I
pg p p
! ! ™ ! ™
Ist Intrare
q
Treapta (1/s) Rampa (1/s2
)
Parabolica
(1/s3
)
Ist = eroare de poziţie Ist = eroare de viteza
Ist = eroare de
acceleraţie
0
1
1 k
g g
1 0
1
k
g
2 0 0
1
k
Din analiza tabelului prezentat rezultă ca pentru un sistem la care se doreşte atingerea unei erori
staţionare zero, prin adăugarea unui element de reglare de tip integrator se introduce un pol în origine
ceea ce conduce la eroare staţionară zero. Utilizarea regulatorului cu acţiune proporţionala este impusa
de necesitatea obţinerii unei anumite valori a răspunsului în regim staţionar însa cu precizarea ca
acţiunea sa conduce la creşterea duratei regimului tranzitoriu. Se impune deci utilizarea în plus a unui
element de reglare de anticipaţie ± derivativ. Utilizarea sa singulara poate conduce fie la anularea
polului existent în funcţia de transfer fie la scăderea cu un grad a numărului de poli în origine ceea ce
uneori poate conduce la instabilitatea sistemului (pentru q=1, la intrarea treapta unitara adăugarea unui
regulator derivativ duce la apariţia erorii staţionare iar pentru rampa unitara la eroare staţionară g). De
aceea acţiunea de corecţie derivativa este combinata cel puţin cu cea proporţionala. Prezenta
elementului derivativ conduce şi la creşterea suprareglajului.
Din punctul de vedere al proiectării unui SRA, interesează eroarea staţionară :
In raport cu referinţa
In raport cu perturbaţia.
Calculul erorii staţionare în raport cu referinţa
71.
72.
73. ? A0 0
lim lim lim ( ) ( )st
t s s
t s s s R s Y sI I I
pg p p
! ! ™ ! ™ !
? A0
0
( ) ( ) ( )lims
s R s H s R s
p
™ ™
77. 22
referinţa = treapta unitara:
1
( )R s
s
!
? A ? A0 0
0 0
1
lim 1 ( ) lim 1 ( )st
s s
s H s H s
s
I
p p
! ™ ™ !
78.
79. 2
0 02 2
0
2
=1n
n n
H s H
s
aca
s
d
[
[ [
!
0stII =I
referinţa = rampa unitara: 2
1
( )R s
s
!
? A ? A0 02
0 0
1 1
1 ( ) 1 ( )lim limv
s s
s H s H s
ss
I
p p
! ™ ™ ! ™
81. 2
0 2 2
2
n
n n
da H s
s s
ca
[
[ [
!
2
0IIv
n
I
[
™
! {
TEMA: sa se calculeze stI în raport cu perturbaţia (se va utiliza expresia 0vH pentru 0H .
Iv
y
t
y
t
Ist = 0
Referinţa
treapta rampa
82. 23
C3. Principiile alegerii şi acordării regulatoarelor
Tipuri de regulatoare. Caracteristici, performanţe
Intr-un SRA regulatorul elaborează algoritmul de reglare a procesului în funcţie de eroarea dintre
referinţa şi ieşire. Legea de reglare a regulatorului reprezintă dependenta dintre I(t) şi comanda u(t) pa
care regulatorul o aplica procesului (parţii fixate).
Analiza pe care o vom face, pune în evidenta modul în care se reflecta intervenţia acţiunii regulatorului
asupra parţii fixate care se presupune generic a fi:
element de întârziere de ordinul I cu sau fără timp mort,
element de întârziere de ordinul II ( sau element oscilant de ord.II) cu sau fără timp mort
Se evaluează apoi răspunsul indicial al sistemului :
fără intervenţia perturbaţiei
cu intervenţia mărimilor perturbatoare.
Se vor pune în evidenta influenţa legilor de reglare asupra performanţelor SRA:
suprareglaj
viteza de răspuns (timp de creştere)
durata reg. tranzitoriu
factor de amplificare
factor de amortizare
cu sau în prezenta perturbaţiilor.
Tipuri de regulatoare
După tipul IT (instalaţie tehnologica):
REG ptr. procese cu caracteristici invariante în timp (LTI)
REG ptr. procese cu caracteristici variabile în timp (REG adaptive şi extremale)
După viteza de răspuns a IT :
REG ptr. procese lente
REG ptr. procese rapide
După caracteristicile de funcţionare ale RA :
REG cu acţiune continua
REG cu acţiune discreta
REG liniare ( u=f(I) dependenta liniara)
REG neliniare( u=f(I) dependenta neliniara : ex. releu cu doua sau trei poziţii)
După algoritmul de reglare (sau legea de reglare elaborata de REG):
REG convenţionale de tip : P, PI, PD PID, PDD2
REG cu caracteristici speciale : REG adaptive, extremale, cu estimarea stării, etc.
84. _
1 1
R
R real
K
H s
sX
!
™
daca se considera întârzierea proprie a regulatorului real.
Răspunsul indicial al regulatorului P
1
( ) RY s K
s
! ™ ( ) Ry t K!
sau din ( ) ( ) ( ) 1 ( )R Ru t K t t u t KI I! ™ ! !
Analiza unui SRA cu REG de tip P şi Hf = elem. de întârziere de ordinul I:
KR ( )
1
f
f
f
K
H s
T s
!
U(s)I(s)
Y(s)R(s)
-
+
v(s)
7
1
KR
HR (s)= KR
U(s)I(s)
u(t)
I(t)
REG
I
I(t)
t
u(t)
85. 25
1) în raport cu referinţa R(s) răspuns indicial:
0
0
( ) 1
( )
1 ( ) 1 1
1
1
R fd
O
fd R f
R f
K KH s K
H s
TH s K K T s
s
K K
! ! ™ !
Prin intervenţia REG de tip P, sistemul H0 romane unul de ordinul I cu următoarele performanţe:
1 1
1 1
st
R fK K K
I ! !
0
1
R f
R f
K K
K
K K
!
0
1
f
R f
T
T
K K
!
P
KR Ĺ stI Ļ 0T Ļ 0K Ĺ
Creşterea factorului de amplificare KR determina o reducere a erorii staţionare (deci o creştere a
preciziei) şi o reducere a constantei de timp a sistemului (viteza mai buna de răspuns).
Obs: alegerea unui REG de tip P, implica funcţionarea sistemului cu eroare staţionară care nu poate
fi scăzuta până la zero. De aici rezultă concluzia ca NU se recomanda utilizarea acestui tip de
regulator singur decât atunci când precizia impusa ieşirii se încadrează în limitele impuse.
2) în raport cu perturbaţia P(s) de tip treapta unitara :
0
1
1
1
1
f
f f
p
f R f f R
f
K
T s K
H
K K T s K K
T s
! !
™ ™
;
1
( )
1
f
p
f f R
K
Y s
T s K K s
! ™
™
86. _
1
( ) lim lim
1 1
f f
st vf s à s à
f f R f R
K K
Y s s Y s s
T s K K s K Kp p
« »
! ™ ! ™ ™ !« » ¬ ¼ ½ ™ ™¬ ¼ ½
cu cat KR creste, cu atât efectul perturbaţiei este scăzut (răspunsul ieşirii în regim staţionar scade):
( )
1
f R
d
f
K K
H s
T s
™
!
I(s)
Y(s)
R(s)
-
+
87. 26
P
KR Ĺ _st f
y Ļ
Concluzie: un regulator P se poate alege atunci când procesul conţine cel puţin un element integrator.
Astfel se asigura eroare staţionară nulă deci o buna comportare a sistemului în regim staţionar.
Pentru procese cu mai multe constante de timp, alegerea unui regulator P, poate atrage instabilitatea
sistemului. Se indica alegerea factorilor mici de amplificare care însa va sacrifica precizia
răspunsului în regim staţionar (creste eroarea staţionară).
Regulatorul integrator (I)
Legea de reglare :
0
1
( ) ;
t
i
i
u t dt
T
T constanta de integrare
I!
!
´
90. 1
1
1
R
i
H s
T s sX
!
™ ™
daca se considera întârzierea proprie a regulatorului real.
Răspunsul indicial al regulatorului I
2
1
( ) R R
i i
K K
Y s
T s s T s
! ™ ! ( )
i
t
y t
T
!
Abaterea răspunsului real indicial al unui regulator I, în raport cu răspunsul ideal, este cu atât mai
mare cu cat constanta de timp proprie regulatorului este mai mare:
91.
92. 1
1
R
i
H s
T s sX
!
Concluzie: răspunsul unui regulator I este o rampa cu panta 1/Ti. Regulatorul I are un caracter de
memorie deoarece la o comanda u(t) nenula poate fi trimisa spre proces chiar daca intrarea în
regulator este nula. Prezenta polului în origine în funcţia de transfer a regulatorului asigura o buna
1
94. 27
comportare în regim staţionar a SRA la intrarea treapta unitara însa gradul de stabilitate al sistemului
poate sa scadă. în general regulatoarele I se folosesc în combinaţie cu cele de tip P.
105. 2
1
;
1
2
f RR f i f
n
i f f R f
K KK K TT
TT K K T
[
!
Răspunsul acestui sistem este compus dintr-un răspuns echivalent al unui sistem de ordin II şi un
răspuns determinat de prezenta zeroului
1
i
z
T
! la numărătorul funct. de transfer.
Răspunsul indicial al sistemului este :
2 2
2 2 2 2
1
( )
2 2
n i n
n n n n
T
Y s
s s s s s
[ [
[ [ [ [
™
! ™
Aplicând transformata Laplace inversa rezultă:
2
2
( )
( ) ( ) i
dy t
y t y t T
dt
!
Rezulta deci ca răspunsul sistemului este compus din răspunsul unui sistem oscilant de ordin II la care
se adăuga mărimi proporţionale cu derivata 2 ( )dy t
dt
, cu coeficient de proporţionalitate =Ti. Răspunsul
( )y t al sistemului va înregistra:
Modificarea (creşterea) suprareglajului în funcţie de constanta acţiunii integrale Ti
(Obs: pentru un sistem oscilant de ordinul II,
2
1
II e
T
W
!
106. = fW .
Suprareglajul lui ( )y t va fi afectat şi poziţia în planul complex a zeroului lui zr)
R(s)
113. 0 2
1
f i v
v
i f i f R f R
K K s Y s
H s
V sTT s T K K s K K
! !
La aplicarea unei perturbaţii treapta unitara, răspunsul sistemului si eroarea staţionara sunt:
114.
115. 0
1
;v vY s H s
s
! ™
0 1 2 3 4 5 6 7
20
40
60
80
100
0 1 2 3 4 5 6 7
20
40
60
80
100
[ntc[%]
r
n
z
[
^ =0.3
^ =0.5
^ =0.7
r
n
z
[
^ =0.7
^ =0.5
^ =0.3
W[%]
124. _
1
1
1
R d
R real
K sT
H s
sX
!
™
daca se considera întârzierea proprie a regulatorului real.
Răspunsul indicial al regulatorului PD
Răspunsul componentei derivative alături de cea proporţionala, introduce un efect de anticipaţie ceea ce
atrage o îmbunătăţire a stabilităţii sistemului.
Analiza unui SRA cu REG de tip PD şi Hf = elem. de întârziere de ordinul I:
1
125.
126. 1R R dH s K T s! ™
U(s)
I(s)
u(t)
ideal
KR
1
u(t)
real
KR
I
I(t)
t t
132. 1
( )
1
R d
R
K T s
H s
sX
!
( )
1
f
f
f
K
H s
T s
!
U(s)I(s) Y(s)R(s)
-
+
v(s)
7
133. 33
Pentru un sistem de ordinul II, alegerea unui regulator PD permite eliminarea unei constante de timp T1
dar prezenta lui X conduce tot la un sistem de ordinul II.
Propunem o comparaţie intre acest SRA cu REG =PD şi cel în care REG este de tip P, pentru acelaşi
proces:
0 1
1 2
2
( )
( ) (0) (0) 1
( )
K P s
H s P P
P ssE
! ™ ! ! sau
2
0 2 2
( )
2
n
n n
H s K
s s
[
[ [
!
134.
135. 0 _ 2
22 2 2
1
( )
11
1
1 1
R f R f
PD
R fR f
R f R f
K K K K
H s
TK KT s T s K K T
s s
K K K K
XX X X
™ ™
! ! ™
™ ™
™ ™
136. 0 _ 2
1 2 1 2
( )
1
R f
P
R f
K K
H s
T T s T T s K K
™
!
™
;
Comparând cele doua răspunsuri :
0 ( )
1
f R
f R
K K
K s
K K
!
este factorul de amplificare identic pentru cele doua sisteme
1
1
st
f RK K
I !
aceeaşi pentru ambele sisteme
143. 2
1
( )
1
R i d i
R
i
K TT s T s
H s
T s sX
!
daca se considera întârzierea proprie a regulatorului real.
Răspunsul indicial al regulatorului PID
Algoritmul PID se recomanda în general, pentru procese cu doua constante de timp predominante,
alegând astfel parametrii de acord ai regulatorului încât aceste constante sa fie reduse.
Analiza unui SRA cu REG de tip PID şi Hf = elem. de întârziere de ordinul II:
Pentru procesul cu doua constante de timp predominante, se recomanda un regulator PID având funcţia
de transfer :
144.
145.
146. 1 21 1
( )
1
R
R
K s s
H s
s s
U U
U X
!
Se aleg 1 1TU ! şi 2 2TU ! .
R(s)
153. f K !
se determina precis in functie de K.
Adăugarea componentei D la un regulator impune o atenţie mărită la acordare pentru obţinerea unor
performanţe îmbunătăţite. In cazul proceselor cu timp mort, introducerea componentei D nu aduce
îmbunătăţiri semnificative.
159. ,H H , venind de la valori mai mari decât H sau venind de la valori mai mici decât H .
Aceste regulatoare unde nu se cer performanţe ridicate, se recomanda în general pentru procese cu timp
mort X şi a căror constanta de timp T respecta raportul 0.2
T
X
e
Regulatoare tripoziţionale
Legea de reglare :
I
u
+M
-M
I
u
+M
-M
ideal
cu histerezis
Regulatoare
neliniare
bipoziţionale tripoziţionale
160. 37
0 -
u
pentru
u pentru
u
pentru
I
I
I
! (
! ( (
! (
In unele cazuri, structura regulatoarelor neliniare bipoziţionale şi tripoziţionale, este completata cu
circuite de corecţie locala, obţinându-se legi de reglare PI, PD sau PID.
Criterii de alegere a tipului de regulator
Alegerea tipului de regulator pentru un proces dat, este funcţie de caracteristicile procesului tehnologic
şi de performanţele impuse sistemului de reglare.
Pentru procese lente se recomanda utilizarea regulatoarelor continue liniare sau a celor
bipoziţionale şi tripoziţionale
Pentru procese rapide sunt recomandate regulatoare au căror parametrii de acord au game reduse de
variaţie.
Prezenta timpului mort în funcţionarea unui proces tehnologic impune următoarele obs:
Componenta D se utilizează numai daca procesul conţine mai multe constante de timp ce pot fi
reduse prin intermediul unui algoritm PID.
Pentru un proces caracterizat printr-o constanta de timp T şi un timp mort, se recomanda utilizarea
unui REG de tip PI sau P (regulatorul P se alege numai daca eroarea staţionara este admisibila ca
valoare). Daca raportul 0.2
T
X
e , se recomanda un regulator bipoziţional daca performanţele impuse
nu sunt foarte severe.
Variaţiile de sarcina ale procesului (perturbaţiile) impun următoarele restricţii în alegerea unui REG:
Pentru procese cu o constanta de timp medie şi timp mort redus, la o perturbaţie cu amplitudine
medie şi o frecventa redusa, se recomanda un REG = P sau unul bipoziţional.
Pentru procese cu mai multe constante de timp şi timp mort redus, la perturbaţii de amplitudini
variabile şi frecvente mari, se recomanda un algoritm PI.
I
u
+M
-M
I
u
+M
-M
ideal
cu histerezis
+(
+(
161. 38
Pentru procese cu mai multe constante de timp şi timp mort redus, la perturbaţii de amplitudini mari
şi frecvente mari,se recomanda un PID.
Obs: pentru frecventa perturbatiilor se intervine cu I iar pentru amplitudine se adauga D.
Dupa modelul matematic al procesului:
Pentru procese cu doua sau mai multe constante de timp nu se recomanda un regulator P ci un
regulator PI sau PID care anuleaza eroarea stationara si asigura viteza ridicata de raspuns.
In functie de parametrul reglat sunt recomandate diverse tipuri de regulatoare avand in vedere
dinamica procesului (X ,T) si caracterul perturbatiilor.
In general adăugarea componentei I la componenta P a unui REG, deşi asigura eroare staţionară nula,
poate atrage instabilitatea sistemului. Ïn acest caz se recomanda reducerea factorului de amplificare
RK . Pentru sisteme cu referinţa constanta şi perturbaţii de amplitudine şi durata redusa, NU se justifica
utilizarea REG = PI. Introducerea efectului I este justificata când intrarea în sistem se modifica des sau
daca sistemul de reglare are mărimea de intrare variabila lent după un program iar perturbaţiile care
intervin în proces sunt lente.
Adăugarea componentei D urmăreşte reducerea suprareglajului care apare în cazul utilizării
componentelor P şi I şi când intervin perturbaţii bruşte, în perioada de pornire a procesului sau pentru
procese discontinue. Prezenta componentei D, determina şi creşterea factorului de amortizare deci se
îmbunătăţeşte desfăşurarea procesului la apariţia unei perturbaţii bruşte. Pentru procesele continue,
adăugarea efectului D măreşte durata regimului tranzitoriu şi reduce suprareglajul. In cazul proceselor
supuse la perturbaţii cu frecventa mare, prezenta sa poate fi dăunătoare.
P
RK o stI q 0T q
164. ,R iK T o 0stI ! ; ;n tt[ Wo o q oK o
(instabilitate !!)
In tabelul de mai jos prezentam sistematizat modul de alegere a algoritmului de reglare pentru
diverse tipuri de procese descrise prin funcţia de transfer a parţii fixate
169. 1 2
( )
1 1
f
f
K
H s
T s T s
!
DA cu performanţe
reduse
DA dar cu restricţii
asupra amplificării
Se utilizează rar
DA cu restricţii asupra
amplificării
170. 1
( )
1
f
f n
i
K
H s
T s
!
—
Rar, performanţele
sunt scăzute
DA Rar DA
( )
1
s
f
f
K e
H s
Ts
X
™
!
DA când
0,1
fT
X iar stI este
în limite admisibile
DA F. rar
Neconvenabil când
timpul mort este produs
de timpul de transport şi
exista zgomot
( ) s
f fH s K e X
! ™ NU NU NU NU
171.
172. 1 2
( )
1 1
s
f
f
K e
H s
T s T s
X
™
!
NU DA NU
Rar, în funcţie de tipul
timpului mort şi de
efectul componentei D
Alegerea algoritmului de reglare in functie de natura parametrului reglat
Tip regulator/
Parametrul de reglat
P PI PID Bipozitional
Temperatura
DA
daca 0,1
T
X DA DA
Da in functie de
raportul
T
X
Presiune
DA
daca nu exista timpi
morti prea mari
DA In cazuri specilale -
Debit NU DA NU -
Nivel
DA
daca nu exista timpi
morti prea mari
DA - DA
Turatie
DA
daca timpii morti sunt
foarte mici
DA DA, mai rar NU
Tensiune DA DA DA, mai rar NU
173. 40
C5. Alegerea şi acordarea regulatoarelor pentru procese rapide
Proces rapid: este caracterizat prin constante de timp mici şi timp mort neglijabil. Se considera ca o
constanta de timp este mica daca iT 10 sec .
Alegerea tipului de regulator este în general funcţie de criteriile de performanta impuse răspunsului sub
acţiunea intrării şi a eventualelor mărimi perturbatoare. în cazul sistemelor rapide se va propune un
algoritm de reglare care sa asigure urmărirea cat mai fidela a referinţei şi rejecţia perturbaţiilor daca
acestea intervin. Algoritmul de reglare va conduce la un SRA cu o comportare satisfăcătoare din aceste
doua puncte de vedere însa nu permite satisfacerea anumitor performanţe care s-ar impune eventual
răspunsului.
Printre criteriile utilizate pentru determinarea valorilor parametrilor de acord cu asigurarea cerinţelor de
performanta impuse sistemului, sunt criteriul modului şi criteriul simetriei.
Criteriul modulului
In cazul unui sistem liniar monovariabil suspus unei perturbaţii aditive P, în cazul unei comportări
ideale, mărimea de ieşire y trebuie sa urmărească cu exactitate mărimea de intrare, fie ea şi variabila:
174.
175. y t r t!
atât în regim staţionar cat şi tranzitoriu.
176.
177.
178.
179. 0
( ) ( )
( )
R v
ov
Y s Y s
Y s H s r s H s v s! ™ ™
1 4 2 4 3 1 44 2 4 43
Răspasul
209. 0
1
0 ,
O
V
H j
H s s sau j
[® ! !
±±
! ! ¯
±
±°
0
v
0
M Ȧ
M Ȧ
ar H = 0
ceea ce se traduce prin :
HR(s) H2 (s)
r
+
-
I U Y
V
7H1 (s)
210. 41
urmărirea exacta a referinţei( referinţa este urmărita în modul şi faza ± vezi condiţia de modul şi
argument)
rejecţia perturbaţiei
Aceste condiţii trebuie îndeplinite pentru toata gama posibila de variaţie a pulsaţiei. Din aceste
condiţii impuse modulelor deriva şi denumirea de criteriul modului.
Pentru procese rapide cum sunt: acţionările electrice şi hidraulice, deoarece se pot identifica
modelele matematice ale proceselor reale (deci
211. fH s se recomanda aplicarea variantei Kessler
a criteriului modului. Acesta varianta oferă un algoritm de acordare optima a REG care sa
asigure simultan o comportare buna atât în raport cu semnalele de intrare cat şi în raport cu
perturbaţiile, fără a trata separat asigurarea anumitor performanţe.
215. 1
( )
1 1
f
f n
i
K
H s
s T s T s7
!
™ —
[2]
unde:
Kf - reprezintă coeficientul de transfer al parţii fixate
Ti ± reprezintă constantele dominante (mari) de timp (constante de timp principale):
10iT
T™ - reprezintă suma constantelor de timp parazite care sunt mult mai mici decât cele predominante:
_ a
1
min
10
iT T7 !
In ambele cazuri varianta Kessler pentru procese rapide propune un regulator care sa transforme
sistemul închis SRA intr-unul de ordinul II în care se elimina contribuţia în răspuns a constantelor de
timp dominante. In ceea ce priveşte anularea efectului perturbaţiilor, criteriul modulului propune forme
analitice de legi de reglare care plasează un element integrator înaintea punctului de aplicaţie al
acestora. Prezenta elementului integrator înaintea punctului de aplicaţie a perturbaţiilor conduce la
anularea efectului acestora daca ele sunt de tip treapta unitara.
220. 1
1
m
k
R
s
H s
s
U
U
!
—
unde:
2
k k
f
m n
T
K T
U
U 7
!
!
! ™ ™
®
±
¯
±
°
Varianta Kessler pentru procese rapide descrise prin funcţia de transfer [2] propune alegerea unui
regulator a cărui funcţie de transfer sa aibă expresia:
221.
222. 1
1
m
k
R
s
H s
U
U
!
—
unde:
2
k k
f
m n
T
K T
U
U 7
!
!
! ™ ™
®
±
¯
±
°
In concluzie criteriul modulului, indiferent de expresia funcţiei de transfer a parţii fixate, conduce la
obţinerea pe calea directa a unei funcţii de transfer cu un pol în origine. Prezenta acestuia, înaintea
punctului de aplicaţie al perturbaţiilor, asigura urmărirea precisa a referinţei (eroare staţionara zero)
dar si anularea efectului perturbaţiilor.
a) Pentru primul caz ajungem la:
225. 22
0 2 2 2 2
2
2
1
21
1 11 2 2 2
2
n
n n
T
H s
T s T s s s
s s
T T
[
[ [
7
7 7
7 7
! ! !
Deci oricare ar fi expresia procesului rapid de reglat, prin aplicarea variantei Kessler se ajunge la un
sistem oscilant de ordinul II ale cărui caracteristici sunt formalizate.
1
2
2
0.7
2
n
T
[
7
®
!±
™±
¯
±
! !±°
;
226. 43
Se observa ca în urma acordării regulatoarelor aplicând varianta Kessler, constantele de timp
dominante sunt înlăturate iar parametrii caracteristici ai sistemului sunt determinaţi de suma
constantelor de timp parazite.
b) Pentru cazul al doilea ajungem la aceeaşi expresie pentru
227. dH s deci la aceleaşi
performanţe.
Pentru ambele variante deducem:
2
1
II e
T
W
! 0,043 4,3%W ! ! ;
4 4.78
8
1
2
t
n
t T
T
[
7
7
$ ! ! ™
™
pentru K , vezi funcţia de transfer
228. dH s : 1
2 2
n
vK
T
[
7
! !
Eroarea la viteza este
1
2v T
K
I 7! !
Obs: pentru un sistemul de ordinul II eroarea la viteza se poate det.:
1 2
2
1 2 1 2
21 1 2
2n
viteza
nn
p p
T
p p p p
[
I
[[
7
! ! ! ! !
™
Sau privesc
229.
230. 1
2 1
dH s
T s T s7 7
!
™ ™
1
2v T
K
I /! ! (conform Tabel.)
233. 2 2 2
2 22 20 0
2 2
lim lim
1 2 21 2 2
v
s s
T s T s T s T
T s T ss T s T s
I 7 7 7 7
p p
7 77 7
« » « »
¬ ¼! ! ¬ ¼
¬ ¼ ½ ½
1
2
n
T
[
7
!
™
2
0.7
2
! ! 4.3%W ! 8tt T7!
1
2
vK
T§
!
0stI ! 2st TI 7! ™
Din tabel tragem concluzia ca performanţele răspunsului unui astfel de SRA sunt constante determinate
sau
234. f T7 . Comportarea acestui sistem este total nesatisfăcătoare pentru o intrare rampa.
Exemplu:
Se da SR:
245. 8 1 3 1 8 1 3 1
2 0.1 10 2
R
s s s s
H s
! !
™ ™
-11
7.1
2 0.1
n s[ ! !
™
0.7 ! 4.3W ! 8 0.1 0.8tt sec! ™ !
1
5
2 0.1
K ! !
™
0stI ! 2 0.1 0.2stI ! ™ !
Criteriul simetriei
Criteriul se aplica de asemenea pentru procese rapide atunci când se urmăreşte definirea unui REG
care sa conducă la un SRA care sa aibă eroare staţionară nulă la intrare de tip rampa. Acest criteriu se
foloseşte de regula, în reglarea sistemelor automate SA cu semnale de intrare variabile liniar cu timpul
şi NU pentru semnale de intrare de tip treapta care înrăutăţesc performanţele tranzitorii şi staţionare ale
SRA.
daca
268. 1 1 1
1 1 1
1
1
1 1
1
1
n n n
k k k
f
d n n n
i k kn
k n
f
k
s s
K
H s
s
T s T s T
s s T s
K
U U U
U
U
U
U
U
7
7
! ™ ™ !
™ ™
™ ™ ™ ™ ™
— — —
— — —
—
—
toate constantele de timp de la numărător sunt egale cu 1 2 .... n cU U U U! ! ! ,
c constantU U!
constanta de timp 4c n TU 7! ™
1
1
2
n
k
n
f
k
T
T
K
U
U
7™ ! ™
—
—
Criteriul simetriei propune alegerea unui REG de forma:
284. 46
In sistem pe lângă cei doi poli complecşi ai sistemului oscilant de ordin II, apar un pol şi un zero
suplimentar. Influenţa prezentei unui zero suplimentar, în funcţia de transfer a unui sistem oscilant de
ordinul II, este prezentata în Figura 3 (variaţia suprareglajului şi a timpului tranzitoriu). In mod similar
se poate determina analitic, influenţa unui pol suplimentar asupra performanţelor tranzitorii ale unui
sistem de ordinul II:
Influenţa unui zero suplimentar asupra unui sistem de ordinul II
Influenţa unui pol suplimentar asupra performanţelor unui sistem de ordin II
1
4T7
1
2T7
W
j[
p1
p2
p3 z
0 1 2 3 4 5 6 7
20
40
60
80
100
0 1 2 3 4 5 6 7
20
40
60
80
100[ntc[%]
r
n
z
[
^ =0.3
^ =0.5
^ =0.7
r
n
z
[
^ =0.7
^ =0.5
^ =0.3
W[%]
0 1 2 3 4 5 6 7
10
20
30
40
50
0 1 2 3 4 5 6 7
10
20
30
40
50
[ntc[%]
3
n
p
[
^ =0.3
^ =0.5
^ =0.7
3
n
p
[
^ =0.7
^ =0.5 ^ =0.3
W[%]
285. 47
Figura 4.
Efectul polului suplimentar asupra lui W şi tc poate fi neglijat daca 30. 5 n5 si p [ . In
general prezenta unui pol suplimentar poate înrăutăţi sau îmbunătăţi răspunsul sistemului în regim
tranzitoriu în funcţie de poziţia polului suplimentar în raport cu ceilalţi poli. Poziţia polilor şi a
zeroului este simetrica fata de origine.
In acesta distributie a polilor si a zerourilor se obtine, pentru o intrare treapta, un raspuns cu W! si
™ 11tt T§! , deci performante nesatisfacatoare. Pentru intrarea rampa performantele sistemului sunt mult
imbunatatite.
Exemplu:
Se considera procesul cu :
286.
287. 2
0.1 1 8 1
fH
s s
!
Sa se proiecteze un algoritm de reglare care sa asigure 0stI ! în raport cu referinţa care este o rampa
unitara.
293. 48
C6. Proiectarea SRA prin metoda alocării poli-zerouri
Se doreşte ca pornind de la performanţele impuse sa se găsească o repartiţie a polilor şi zerourilor
funcţiei de transfer a sistemului închis
294. 0H s astfel încât SRA sa îndeplinească toate performanţele
impuse.
Cunoscând şi
299. 0
0
1
1
R
f
H s
H s
H s H s
! ™
Ne propunem sa prezentam relaţiile dintre performanţele dinamice şi staţionare ale sistemului şi
repartiţia polilor şi zerourilor acestuia în planul complex.
Alegerea generica a lui
300. 0H s se face pornind de la excesul polilor asupra zerourilor în funcţia de
transfer a parţii fixate Fe (întotdeauna 0Fe ).
Condiţia de realizabilitate fizica a unui SRA este 0 Fe eu (acesta rezultă din aceea ca excesul de poli
ai
304. 0H s ca fiind un sistem de
ordinul II :
2
0 2 2
( )
2
n
n n
H s
s s
[
[ [
!
daca 03 3Fe e! u se încearcă transpunerea performanţelor intr-un sistem de
ordinul II care are un pol suplimentar:
305.
306.
307. 2
3
0 2 2
32
n
n n
p
H s
s s p
[
[ [
™
!
daca este necesara introducerea unui zero suplimentar :
308.
309.
310. 2
0 2 2
2
n
n n
s z
zH s
s
[
[ [
!
daca din condiţia de realizabilitate fizica este necesara introducerea unui pol şi a unui
zero suplimentar :
311.
312.
313.
314. 2
3
0 2 2
32
n
n n
p
s z
zH s
s s p
[
[ [
™
!
Alocarea polilor si/sau zerourilor şi aprecierea influentei acestora asupra performanţelor SRA,
presupune cunoaşterea :
SRA de ordinul II
Efectele introducerii unui pol suplimentar
Efectele introducerii unui zero suplimentar
Efectele introducerii unei perechi pol-zero
315. 49
1) Sistem cu doi poli
Vom pune în evidenta care trebuie sa fie repartiţia polilor şi zerourilor funcţiei
316. 0H s daca sistemul
are impuse anumite performanţe :
in regim staţionar : stİ la intrare treapta unitara sau rampa ( vİ ) (care sunt funcţie
numai de factorul de amplificare K)
in regim tranzitoriu : n tȦ , ı, ȟ , t (sunt funcţie numai de poziţia polilor în planul
complex)
restricţii impuse de caracteristicile răspunsului în frecventa : NcM ,M (care indica gradul
de stabilitate al sistemului), B RȦ ,Ȧ (banda de frecventa sau lărgimea de banda este
limitată de B[ şi pulsaţia de rezonanta: ele indica comportarea sistemului fata de
perturbaţiile de frecventa înalta)
1) eroarea staţionara nulă la intrarea treapta unitara stİ 0 :
317.
318.
319.
320.
321.
322.
323.
324.
325.
326.
327.
328.
329. 0
0 0 0
0 0 0
0 0
lim lim lim lim 1
1
lim 1 lim 1 1 0
st
t s s s
st
s s
t s s s R s Y s s H s R s
s H s H s H s
s
I I I
I
pg p p p
p p
« » « »! ! ™ ! ™ ! ™ ™« » ½ ½ ½
« » « »! ™ ™ ! ! !¬ ¼ ½ ½
330. 0 0 1H ! pentru reacţie unitara.
doua forme analitice pentru
331. 0H s după cum dorim sa punem în evidenta cei doi poli sau elementele
caracteristice ale unui sistem oscilant de ordinul II:
341. Ncos ȟ
Obs: utilizaţi în Matlab funcţia sgrid care activează pentru planul complex s (+j,+1) liniile de pulsaţie
şi amortizare constanta
2) condiţie de suprareglaj: e iı ı ;
345. t impus n n impus
t t [ [e u
Wimp
W Wimp
W
100%
16%
4,3%
0.5 0.7 1
^
^ = 0
^u 1
^ 0
Sistem
neamortizat
Sistem supra-
amortizat
Sistem
instabil
1e^ e 0
Sistem
amortizat
346. 51
Ex: 4 4
10 10 0.4
10
t n
n
t s [
[
e u !;
4) performanţe în domeniul frecventelor : BȦ = lărgimea de banda cat mai
mica pentru rejecţia perturbaţiilor.
eB B_isȦ Ȧ
pentru zgomote de frecventa mai mare decât B[ sistemul se comporta ca un filtru (in cazul
sistemului de ordin II).
347.
348.
349.
350.
351. 2 2
0 2 22 2 22
n n
B
n B n B
B n B n
H j
jj j
[ [
[
[ [ [ [[ [ [ [
! !
352.
353. 2
0
2
2 2 2 2
2
2
4
n
B
n B n B
H j
[
[
[ [ [ [
! !
2 2 4
B nȦ = Ȧ 1- 2ȟ 2 - 4ȟ + 4ȟ
eB2 B_i !sȦ Ȧ
e B_i
2 2
sn p
4
m uȦ 1- 2ȟ 2 - 4ȟ + Ȧ4ȟ
A(dB)
[
-3 dB
[
356. 52
}
B n
B n
B n
B n
ȟ = 0 .5 Ȧ = 1 .2 7 Ȧ
ȟ = 0 .6 Ȧ = 1 .1 5 Ȧ
ȟ = 0 .7 Ȧ Ȧ
ȟ = 0 .8 Ȧ = 1 .7 6 Ȧ
5) limitarea erorii la viteza (intrarea este rampa):
I ev v_impus
n
2ȟ
= İ
Ȧ
Acesta formula rezultă din:
385. 2
3 2
1 dy
y t y t
z dt
!
Oscilaţiile procesului tranzitoriu cresc ceea ce conduce implicit la scăderea duratei regimului
tranzitoriu: tiar tW Z ]
Pe de alta parte modificarea intr-un sens a duratei regimului tranzitoriu conduce la modificarea în sens
invers a lărgimii de banda a sistemului .
contracţia în domeniul timpului corespunde dilatării în domeniul frecventelor şi
invers.
391. ( )f P!03 s unde ? AnȦ
Ȝ = 0,2
z
Introducerea unui zero este justificata daca ? AȜ 0,2 . Daca zeroul este plasat spre g , efectul
introducerii lui este neglijabil.
392.
393.
394.
395. 2
3 03 2 2
1
2
n
n n
s z
zY s H s R s
ss s
[
[ [
! ™ ! ™
396.
397. K™ ™ ™
n-ȟȦ t
2 2
3 n
2
e
y t = 1- Ȝ - 2ȟȜ + 1 sin Ȧ 1- ȟ t -
1- ȟ
unde
409. 55
3) eroarea la viteza
!v
1 2 n
1 1 1 2ȟ 1
İ = + - -
p p z Ȧ z
Rezulta ca pentru un sistem de ordinul II, prin introducerea unui zero suplimentar eroarea la viteza
se reduce comparativ cu cea a sistemului necompensat.
3) Sistemul cu trei poli
410.
411.
412.
413. 1 2
04
1 2 3
Cp p
H s
s p s p s p
!
1) eroarea staţionara la intrare treapta unitara stİ = 0
425. 3-p t
4 2y t = y t + e C
2) Efecte negative ale introducerii polului suplimentar sunt:
4 2ı ı
t4 t2t t (teoria inversa : contracţia în domeniul frecventelor dilatarea în domeniu
timp)
v4 v2İ İ din 4 2
1 2 3 1 2
1 1 1 1 1
;v v
p p p p p
I I! !
3) Efecte pozitive ale introducerii polului suplimentar: se reduce lărgimea de banda (contracţia în
domeniul frecventelor) ca urmare a dilatării în domeniul timpului.
+j
+1
+j
+1 +1
P = 0
P = 2P = 1
+j
+j
+1
-p1
-p2
-p3
438. 1 2 3
04
1 2 3
p p p
s z
zH s
s p s p s p
!
2) variante de introducere a polului şi zeroului suplimentari :
varianta dipol: atât zeroul cat şi polul sunt apropiaţi de origine astfel încât
$3
3
p
z p ; 1.01 ....1.05
z
439. ǻı = 1...5 % . Deci varianta introducerii unui dipol
conduce la scăderea suprareglajului cu ǻı în raport cu cel al sistemului necompensat
cu dipol.
polul este proporţionat departe de polii dominanţi :
440. u ™3 np 5...10 ȟȦ
In ambele variante :
1 2 3
1 1 1 1
v
p p p z
I !
Exemple:
446. 100
10 1
FH s
s s
!
7.5
%
0.02
50 / sec
v
B rad
W
I
[
e
e
e
eF = 2 sistem de ordinul II.
1) 7.5%
2
2) 0.02 0.02
3) 50 / sec
v v
0.65
n
BII rad
W
I I
[
[
e u
! u
! e e
n
2 2 4
n n
ȟ
Ȧ 65 rad/sec
Ȧ 1- 2ȟ 2 - 4ȟ + 4ȟ Ȧ 46 rad/sec
Intre 2) şi 3) rezultă contradicţie deci este necesar sa procedam astfel: se respecta rezultatul condiţiei
3) pentru pulsaţia naturala şi se sacrifica rezultatul cond 2).
Pentru respectarea erorii de viteza impuse, se adaugă un zero suplimentar care duce la scăderea sa fata
de cea corespunzătoare unui sistem de ordin II. Dar adăugarea unui zero suplimentar conduce la e0 = 1.
Cum condiţia iniţiala este 2u !F 0e e rezulta ca trebuie adăugat şi un pol, deci alegem varianta cu
dipol.
3
3 3
33
3
1.03
7.5 3 4.5
2 1 1 1 1
0.02 0.02
1 1
0.008
3.75
3.64
1.03
0.7
0.028
n
p
z
p z p z
pp z
zp
z
W
I
[
!
! ! $
! e e
®
e± !®±
¯ ¯
!°± !
±°
B n
v
ǻı = 3%
Ȧ Ȧ = 0 rad/sec
447.
448.
449.
450. 2
0 2 2
3.75
3.64
3.64
2 3.75
n
n n
s
H s
s s s
[
[ [
™
!
2) Sa se proiecteze SRA astfel încât :
451.
452.
453. 10
1 10 1
FH s
s s
!
_
4
8sec
0
t
st treapta
t
W
I
e
e
!
466. 59
C7. Alegerea şi acordarea regulatoarelor pentru procese lente
Un proces lent este caracterizat prin constante de timp mari T10s sau prin constante de timp mari şi
timp mort.
Pentru procesele fără timp mort sau cu timp mort neglijabil, criteriul de alegere şi acordare a
regulatoarelor pentru procese rapide poate fi extins şi aici.
Intr-o prima etapa se va utiliza criteriul modulului intersectat cu algoritmul de
determinare a legii de reglare care sa asigure de maniera minimala performanţele
sistemului.
In cea de-a doua etapa, în cadrul domeniului de variaţia a parametrilor de acord ai
regulatorului obţinut din prima etapa, se vor pune condiţii pentru o buna comportare în
raport cu perturbaţiile.
Varianta criteriului modulului cu delimitarea domeniilor de performanta este aplicabila pentru
regulatoare cu doi parametrii de acord PI, PD . Se poate extinde şi la un regulator PID daca se cunosc
relaţiile dintre Ti şi Td.
Exemplu: Se considera un regulator PI şi un proces de ordinul I :
478. R
impus
i
K
f
T
We .
4) Pentru a lua în consideraţie efectul constantelor de timp parazite T/ care apar inevitabil în
funcţia de transfer a parţii fixate şi neliniarităţile care apar în funcţionarea parţii fixate asupra
stabilităţii sistemului şi calităţii regimului tranzitoriu, se folosesc metode experimentale de
determinare a unor valori admisibile pentru parametrii regulatorului. Pentru un proces care
utilizează un PID se fixează iT ! g sau la valoarea maxima pe care o poate atinge) , 0dT ! . în
aceste condiţii se modifica treptat RK pana se aduce sistemul la limita de stabilitate (oscilaţii
neamortizate de amplitudine constanta) . Fata de aceasta valoare a lui _R RK K limita! se
alege parametrul de acord:
479. _ max _ lim0.6....0.75R R itaK K! vezi dreapta _ limR itaK
Condiţiile impuse determina domeniul comun haşurat în care se pot alege parametrii de acord
siR iK T care asigura performanţele impuse răspunsului în regim tranzitoriu şi staţionar.
5) Se impune determinarea lui _R optimK şi _i optimT conform criteriului modulului astfel încât
sistemul sa aibă o buna comportare atât în raport cu intrarea cat şi cu perturbaţiile:
KR
Ti
_v v impusI Ie
_t t impust te
impusW We
488. 2
2
1 1
;
1 1 1
1
R f i R f i
O
i f R f i R f i f i R f
i f
Op
R f i f i R f
K K j T K K j T
H j
j T j T K K j T K K TT j T K K
j T K
H j
K K TT j T K K
[ [
[
[ [ [ [ [
[
[
[ [
! !
!
Se vor
determina
492. 0
0
0 0;
0 1:
0;
0;
p
p
M
M
dM
d
dM
d
[
[
[
[
!
!
® !
±
!±
±
±
!¯
±
±
± !
±°
Din aceste condiţii rezultă o valoare maxima pentru max.R
i
K
T
!
Se vor alege deci valori optime _R optimK şi _i optimT astfel încât sa fie satisfăcute condiţiile de
performanta (punctul definit de
493. _ _,R optim i optimK T sa fie în aria comuna haşurata) iar raportul lor sa fie
_
_
max
R optim
i optim
K
T
! pentru a asigura o buna comportare în raport cu perturbaţiile (condiţiile 1«.5 ).
Criterii experimentale de acordare a regulatoarelor
Modalitatea de acordare a regulatoarelor prezentate până în acest moment s-a bazat pe metode pur
analitice. S-a demonstrat ca în cazul acordării regulatoarelor ptr. procese lente, daca care sunt impuse
ieşirii performanţe multiple, determinarea analitica a parametrilor de acord ai regulatorului este destul
de laborioasa şi chiar nesatisfăcătoare daca luam în consideraţie caracterul aleatoriu al perturbaţiilor.
Metodele practice de acordare se bazează pe experienţa acumulata prin repetarea algoritmilor de
acordare a regulatoarelor pentru procese lente şi rapide şi în condiţii de intervenţie a perturbaţiilor din
cele mai diverse. Astfel pentru un sistem dat, se menţin constante referinţa şi mărimile perturbatoare şi
se modifica parametrii de acord până ce sistemul ajunge sa răspundă cu o ieşire corespunzătoare unui
sistem neamortizat sau aflat la limita de stabilitate. Mărimea de ieşire răspunde prin oscilaţii întreţinute
de amplitudine şi pulsaţie/perioada determinate:
Hd(s)
I(s) Y(s)r(s)
Re [Hd(s)]
Im[Hd(s)
]
N
|Hd(s)|
(-1, j0)
A (M([c)=1, Nc)
B (M([T),N=180°)
H0
494. 62
Figura 5. Reprezentarea caracteristicilor amplitudine-faza sau amplitudine-pulsaţie , faza-pulsaţie
pentru un sistem aflat la limita de stabilitate |A B
Figura 6. Reprezentarea polilor H0 în planul (+1,+j). Marcarea unui sistem aflat la limita de stabilitate
Figura 7. Reprezentarea răspunsului în timp al unui sistem aflat la limita de stabilitate (răspuns neamortizat)
Am exemplificat mai sus care este aspectul hodografului (reprezentarea amplitudine-faza) funcţiei de
transfer a sistemului deschis Hd pentru ca sistemul închis sa se afle la limita de stabilitate. Aceleaşi
concluzii se pot trage din aspectul reprezentării amplitudine/pulsaţie şi faza/pulsaţie (diagramele Bodé)
pentru acelaşi sistem. Se poate face direct analiza sistemului închis H0 care va avea polii pe axa
imaginara a planului (+j, +1) daca sistemul se afla la limita de stabilitate.
Folosind caracteristicile regulatorului specifice stării de stabilitate la limita ale sistemului se vor
determina parametrii optimi de acord ai regulatoarelor de tip P, PD sau PID.
H0
R(s) Y(s)
01
răspuns sub-
amortizat
=1
răspuns critic
amortizat
1
răspuns supra-
amortizat
=0 răspuns
neamortizat
0
răspuns instabil
y(t)
t
0 !
r(t)
T0
|Hd(s)|=M([)|dB
log [
scara logaritmica[c
[T
-1800
log [
scara logaritmica
? AradN
Re [Hd(s)]
N
|Hd(s)|(-1, j0)
|A B
Im[Hd(s)]
495. 63
Metoda Ziegler-Nichols se aplica regulatoarelor utilizate în reglarea proceselor lente la care
perturbaţiile sunt determinate de sarcina şi au durata mare. El propune următoarea procedura:
pentru un regulator PID se fixează acordul pentru Ti la valoarea maxima ( Ti = ) iar acordul pentru
TD la valoare minima (TD =0). Se modifica KR până se aduce răspunsul sistemului la oscilaţii
neamortizate ceea ce înseamna ca sistemul se afla la limita de stabilitate. Se reţin cei doi parametrii
respectiv R0K şi perioada oscilaţiilor 0T . Valorile care se vor propune pentru parametrii de acord ai
regulatorului asigura un raport de
1
4
intre amplitudinea celei de-a doua semi-oscilaţii pozitive oscilaţii
şi prima oscilaţie pozitivă descris şi prin expresia : amortizare în sfert de amplitudine :
.
Criteriul Ziegler-Nichols recomanda următoarele valori de acordare optima a regulatoarelor, în funcţie
de R0K şi 0T :
Pentru regulatoare P:
™R_opt R0K = 0. K
Pentru regulatoare PI:
™
™
R_opt R0
i_opt 0
K = 0.45 K ;
T = 0.8 T
Se poate remarca ca fata de un regulator P, utilizarea unui PI impune reducerea amplificării pentru
compensarea efectelor negative ale componentei I.
Pentru regulatoare PID se recomanda:
;
;
™
™
™
R_opt R0
i_opt 0
D 0
K = 0. K ;
T = 0. T
T = 0.1 T
y(t)
t
r(t)
A A/4
496. 64
Sisteme de reglare automată cu structura speciala
C8. Sisteme de reglare în cascada
Reglarea în cascada se poate alica în cazul reglării automate a proceselor lente şi rapide, acolo unde
prezenta unui număr mare de constante de timp în funcţia de transfer a procesului nu permite aplicarea
reglării convenţionale cu regulatoare P, PI sau PID. Prezenta mai multor constante de timp conduce la
elaborarea teoretica a unor regulatoare care conţin mai multe binoame de gradul I. Acestea sunt dificil
de realizat practic şi nerecomandate daca luam în calcul efectele negative ale componentelor derivative
asupra răspunsului sistemului (amplificarea zgomotelor). în acest caz soluţia o reprezintă reglarea
succesiva a diferitelor mărimi măsurabile din proces ajungând ca în ultima faza sa se poată regla acea
mărime de proces dependenta de cele reglate anterior.
Reglarea în cascada se poate implementa daca:
procesul tehnologic poate fi descompus în sub-procese ale căror variabile sunt
măsurabile;
funcţia de transfer a procesului tehnologic poate fi scrisa ca produs de funcţii de
transfer cu cel mult doua constante de timp;
se aplica în condiţiile în care constantele de timp asociate diferitelor componente (sub-
procese) ale procesului se găsesc intr-un raport care variază în domeniul (3«.10);
este operaţională daca viteza de răspuns a buclei interioare este mai mare decât a celei
exterioare (mărimile intermediare răspund la perturbaţii mai repede decât mărimea de
ieşire);
este eficienta în condiţiile în care perturbaţiile care acţionează asupra sistemului se pot
compensa în buclele interne de reglare;
reglarea în cascada facilitează controlul variabilelor intermediare şi oferă precizie
deoarece perturbaţiile ce acţionează asupra procesului se compensează în buclele
interioare;
reglarea în cascada datorita prezentei mai multor reacţii negative are în plus şi avantajul
unei sensibilităţi mai reduse la variaţia anumitor parametrii de proces sub acţiunea
perturbaţiilor;
obţinerea unor performanţe ridicate este legata de alegerea cu dificultate a regulatoarelor
buclelor interioare deoarece buclele interioare au referinţa fixata intern de către alt
regulator.
In general pentru buclele interioare se recomanda alegerea unor regulatoare de tip P sau PI , f. rar PID.
Prin alegerea unui regulator P pentru bucla interioara se măreşte viteza sa de răspuns dar cu
dezavantajul conservării unei erorii staţionare a mărimii reglate de respectiva bucla. Daca procesul
impune performanţe precise şi mărimilor intermediare, se recomanda alegerea unui regulator PI (eroare
staţionară =0). Pentru bucla exterioara se recomanda alegerea unui regulator PI , rar PID.
497. 65
Figura 8. Schema generala a unui sistem de reglare în cascada
Reglarea în cascada se poate exemplifica prin instalaţia de reglare a temperaturii unui reactor chimic:
Figura 9. Schema de reglare în cascada a unui reactor
chimic
Referinţa regulatorului RA1 este fixata din exterior dar cea a lui RA2 este fixata de către RA1.
Regulatorul RA2 acţionează prin intermediul elementului de execuţie asupra debitului de abur din
camaşa reactorului. Perturbaţiile procesului pot fi variaţiile caracteristicilor aburului din camaşa
reactorului ± P2 sau variaţiile debitului sau temperaturii fluidului de alimentare a reactorului- P1.
In schema de reglare bucla interioara are constante de timp mai mici şi permite compensarea rapida a
perturbaţiilor P2(s). Ea poate fi reglata cu un regulator P sau PI daca se impune eroare staţionara nulă
pentru ș1(s). Bucla exterioara sau principala conţine constante mari de timp şi reclama pentru reglare
un regulator PI (care va asigura Ist =0 pentru ieşirea ș (s)).
RA1
2fHRA2
1fH™ ™
P2(s)
P1(s)
ș (s)ș0(s) +
+
-
ș1(s)
Tr2
Tr1
-
Tr2RA2
RA1
Tr1
ș
ș1
ș0
Produs
Produs
Abur
R(s) RA1
2fHRA2
1fH™ ™
P1(s) P2(s)
Y(s)
+
+
-
498. 66
Criterii de reglare în cascada
Pentru ca reglarea în cascada sa fie performanta se impune următoarele restricţii:
perturbaţiile cele mai importante se aplica în bucla interioara pentru a fi compensate rapid
prin regulatorul RA2;
constantele de timp ale parţii de proces cuprinse în bucla interioara sa fie mai mici decât
cele ale buclei principale iar raportul lor sa fie:3 5....102
1
T
T
;
parametru de ieşire din bucla interioara sa fie direct legat de mărimea de ieşire a procesului
(funcţia de transfer
499.
500. f1
1
Y s
H =
Y s
)
Reglarea SRA cu subprocese dispuse în cascada impune reglarea întâi a mărimii intermediare şi apoi a
celei de proces. Se procedează deci la determinarea regulatorului RA2 şi apoi a lui RA1. Alegerea lui
RA2 se face astfel încât acţiunea să determine creşterea vitezei de răspuns a buclei interne deoarece aici
se aplica perturbaţiile importante ale procesului.
Alegerea regulatoarelor celor doua bucle se face în funcţie de metoda de proiectare dorita precum şi de
tipul procesului.
daca acordarea regulatoarelor se fac experimental, se determina parametrii de acord ai
regulatorului RA2 = P şi RA1= PI aplicând metoda limitei de stabilitate pentru fiecare
bucla
daca acordarea lui RA2 se face analitic se va determina parametru de acord KR astfel
încât mărimea intermediara sa respecte un _st st impusI Ie . Acordarea lui RA1 se poate
Metoda de proiectare a regulatoarelor
unui SRA în cascada
Analitic Experimental
(Zigler-Nichols)
Tip de proces
Lent
Rapid
Met.analitice de reglare
convenţională
(met. analitice de acordare
a P sau PI, PID)
- varianta Kessler a
criteriului modulului
- criteriul simetriei
Acordarea
reg.convenţionale
(P, PI, PID)
501. 67
face apoi experimental aplicând Ziegler-Nichols astfel încât
0
0
0.45 ;
0.8
R R
i
K K
T T
! ™®
¯
! ™°
.
Regulatorul principal trebuie sa asigure eroare staţionara nulă deci obligatoriu este de tip
PI. Pentru acordarea buclei principale, bucla secundara funcţionează ca o parte
componenta a întregului sistem.
Daca procesele sunt rapide acordarea regulatoarelor impune aplicarea metodelor
analitice : metoda Kessler a criteriului modulului şi criteriul simetriei.
Acordarea regulatoarelor RA1 şi RA2 pentru procese rapide
In acest caz, bucla interioara conţine un proces a cărui funcţie de transfer conţine o singura constanta de
timp dominanta şi o constanta de tip parazita.
502.
503.
504. 2
2
2 21 1
f
f
K
H s
T s T s7
!
.
Conform variantei Kessler a criteriului modulului se alege:
519. 1 1'
1 '
1 1 1 1
'
1 1 2
21 1 1 12 1
2
1f f
f
K K
H s
T s T s T s T s
unde T
T s
T T
7 7
7 7
7
7
! ™ $
!
In acest caz se va alege regulatorul RA1 ca fiind de forma:
520.
521.
522. 1
1 '
1 1
01 '
1
1
2
1
2 1
R
f
T s
H s
sK
s
TT
H
7 7
! !
In general se aplica criteriul modulului sau al simetriei în funcţie de tipul variaţiei în timp a semnalelor
de intrare în bucle.
526. 68
Reglarea în cascada a turatiei motorului de curent continuu
Motorul electric de curent continuu este descris de următoarea funcţie de transfer:
527.
528.
529.
530.
531.
532.
533. s I s s
H s
U s U s I s
; ;
! ! ™
Pentru a determina cele doua funcţii de transfer se porneşte de la modelul matematic al mcc:
unde:
Ra ± rezistenta indusului
La ± inductanţa indusului
Re ± rezistenta circuitului de excitaţie
Le ± inductanţa circuitului de excitaţie
ia ± curent circuit de alimentare
e ± tensiunea electromotoare
[viteza unghiulara (mărimea de ieşire a sistemului)
Ke, Km ± constante de proporţionalitate (electrica , mecanica)
Cm ± cuplu motor
Crez ± cuplu rezistent
a
a a a
e
m m a rez
di
u e R I L
dt
e K
d
C K i J C
dt
[
[
®
! ±
±
!¯
±
± ! !
° [3]
534.
535.
536.
537.
538.
539.
540.
541.
542.
543.
544.
545. a
m
e e a
m
U s E s R I s LsI s
K I s
E s K s U s K R Ls I s
Js
K I s Js s
! ®
±
! ; ! ¯
±
! ;°
558. 1
1
;
1 1
1
1
1
1
1
1
K
H s =
Ts + 1
m
m
m
m
m
m
T
s
Rdeoarece T T H s
T s Ts
T
aproximam deoarece T este foarte mare
T
I s
H s
U s R Ts
!
$
! $
?
559.
560.
561.
562.
563. 2
2
;
2
2
m
K
s =
T s
m
m m e
e m
m e
e m
R
K
s K K K R
H s
JRI s Js K T s
s
K K
R
H s
K T s
™
;
! ! ! !
™
!
Figura 10. Schema generala de reglare a turaţiei motorului electric de curent continuu
Unde :
. (int )
1
.
1
i
TRi
i
TR
K
H functia de transfer a trad de curent ensitate
s
K
H functia de transfer a trad de turatie
s
X
X
;
;
;
!
!
Consideram bucla interioara :
Rn
1HRI
2H ; (s)
n0 +
+
-
I(s)
Tr I
Tr n
-
I0 (s)
DCG EE
U(s)
;
n0
TG
Reg. de
turaţie
Reg. de
curent
BC
- iA
- n
M
1
2
576. 2
2
1 1
1 2 1
i
f
i i m
s K K
H s
K sT s T s
X
X
;
7 ;
! ™ ™ ™
577.
578.
579. 2
2
1
f
m
K
H s
sT T s
;
7;
!
2
2
2 tan seci i
i
unde
T T si este o cons ta de ordinul mili undelor
K K
K
K
X X7; ; 7
;
;
! ®
±
¯
!±
°
Pentru acordarea regulatorului se aplica criteriul simetriei care asigura răspunsul bun al sistemului la
intrare de tip rampa a mărimii de intrare 0; .
582. 1
4
1
; 2
c
n
n
c c
R f n
i
n T
s
H s K T
s
T
U
U U
U
U
7
7
®
±
±
¯
±
« ! ™ »
¬ ¼™
¬ ¼! ! ™ ™ ™
¬ ¼™
¬ ¼
¬ ¼ ½±°
—
)
Bucla principala se acordează cu un regulator PI cu parametrii de acord determinaţi mai sus.
Printr-o reglare corespunzatoare a parametrilor intermediari, reglarea în cascada conduce la o reglare
mult mai performanta fata de reglarea convenţionala cu un singur regulator.
R;
+
-
1 1
1 2
i
i i
s
K sT
X
7
™
0;
1
1
tr
K
H
sX
;
;
!
1 s
K
X;
;
2
m
K
T s
mr
RI
+
-
1
cK
sQX
1
1
K
Ts
U(s)
1
1
i
tr
i
K
H
sX
!
1 i
i
s
K
X I(s)
584. 71
C9. Reglarea după perturbaţie si combinata
Reglarea după perturbaţie
Metoda de reglare propusa până acum se baza pe funcţionarea automată unui SRA dictata de abaterea
sau eroarea intre referinţa şi ieşirea din proces. Referinţa reprezintă valoarea dorita a mărimii de ieşire
care nu întotdeauna este diferita de ieşirea reala măsurata.
Reglarea în funcţie de perturbaţie se bazează pe ipoteza ca perturbaţiile din proces sunt cunoscute şi
măsurabile. Mărimea de ieşire se menţine la valoare constanta (valoarea dorita) prin măsurarea
perturbaţiilor şi elaborarea comenzii înainte ca aceasta sa se modifice fata de cea dorita.
Figura 11. Schema de reglare în funcţie de perturbaţie
585.
586.
587.
588.
589. P RP fY s H s H s H s P s« »! ™ ™ ½
Punând condiţia ca ieşirea sa nu fie influenţata de perturbaţii sau efectul perturbaţiilor sa fie anulat prin
alegerea corespunzatoare a unui regulator , rezultă:
590.
591.
592. P
RP
f
H s
H s
H s
!
Prin urmare, metoda de reglare după perturbaţie presupune cunoaşterea precisa a funcţiei de transfer a
parţii fixate fH precum şi cea dintre ieşire şi perturbaţie PH .
Obs:
condiţia de realizabilitate fizica a regulatorului RPH impune ca excesul de poli ai lui
fH sa fie inferior celui corespunzător lui PH :
f Pe ee
deoarece asupra procesului pot intervenii şi alte perturbaţii, metoda de reglare după o
perturbaţie se dovedeşte a fi destul de limitata
acesta metoda de reglare prezintă avantajul ca acţiunea de compensare a perturbaţiei
se elaborează înainte ca mărimea de ieşire sa fi fost denaturata prin intervenţia ei.
Din combinarea metodei de reglare convenţionale după eroare cu cea reglarea după perturbaţie, se
elaborează un sistem de reglare combinata.
Reglarea combinata
Reglarea combinata combina avantajele reglării după eroare cu cele ale erorii după perturbaţie. Un
regulator RPH se utilizează pentru compensarea acelor perturbaţii care sunt măsurabile. El trebuie sa
asigure viteza ridicată de răspuns pentru compensarea efectului acestora. Un alt regulator RH
poziţionat pe calea directa asigura eroare staţionară nulă dar şi compensarea efectelor celorlalte
perturbaţii care nu sunt direct măsurabile:
HRP(s) HF(s)
HP(s)
™
+
+
Y(s
)
P(s)
593. 72
Figura 12. Schema de reglare combinata
Pentru a determina Y(s) aplicam principiul superpoziţiei presupunând succesiv acţiunea lui P(s) şi a lui
R(s):
594.
595.
596.
597.
598.
599.
600.
601.
602.
603.
604. 1
P
P R f
R f
H s
Y s P s H s Y s H s H s Y s P s
H s H s
« »! ™ ™ ™ ! ™ ½ ™
[4]
605.
606.
607.
608.
609.
610.
611.
612.
613.
614.
615.
616. 1
RP f
RP R f
R f
H s H s
Y s P s H s Y s H s H s Y s P s
H s H s
™
! ™ ™ ™ ! « » ½ ™
[5]
617.
618.
619.
620.
621.
622. 1
R f
R f
H s H s
Y s R s
H s H s
™
! ™
™
[6]
Din relaţiile [4], [5] şi [6] rezultă :
623.
624.
625.
626.
627.
628.
629.
630.
631.
632.
633.
634.
635.
636.
637. 1 1 1
R f RP fP
R f R f R f
H s H s H s H sH s
Y s R s P s P s
H s H s H s H s H s H s
™ ™
! ™ ™
™ ™ ™
649. 0 00 0
1
P RP f
R f
P P
H s H s
H s s
H
H
H
s
H s s
™
™
! !!
650.
651.
652. P
RP
f
H s
H s =
H s
Regulatorul principal va fi acordat considerând ca perturbaţiile principale sunt compensate de RPH iar
ieşirea trebuie sa aibă performanţele impuse.
Exemplu:
Se considera procesul tehnologic descris prin
653. 2
1.2 1
fH s
s
!
. Elementul de execuţie este un element
de întârziere de ordinul I cu factor de amplificare 2 şi constanta de timp 1,2s. Daca perturbaţia se aplica
direct în proces iar funcţia de transfer a traductorului de perturbaţie este 0.5 , sa se dimensioneze
funcţia de reglare după perturbaţie RPH .
R(s)
+
HR Hf
HP
HRP
+ ™
P(s)
-
-
Y(s)
659. 0f RP TP E fP s H P s H s H s H s H™ ™ ™ ™ !« » ½
660.
661.
662. 1 1
1.2 1
2
0.5
1.2 1
RP
TP E
H s s
H s H s
s
! ! !
™
C10. Sisteme de reglare cu predicţie a proceselor timp mort
Sistemele cu timp mort conţin în expresia funcţiei de transfer, componenta s
e X
care induce mărimii de
ieşire şi implicit transmiterii semnalului de reacţie, o întârziere egala cu X . Semnalul de reacţie este
transmis defazat fata de R(s), ceea ce face imposibil calculul de eroare
663.
664.
665. s R s Y sI ! . Pentru a
asigura un proces de reglare continuu si sincron din punctul de vedere al momentului în care se
colectează mărimea de ieşire în raport cu referinţa, se încearcă separarea componentei s
e X
din funcţia