Download as PDF, PPTX

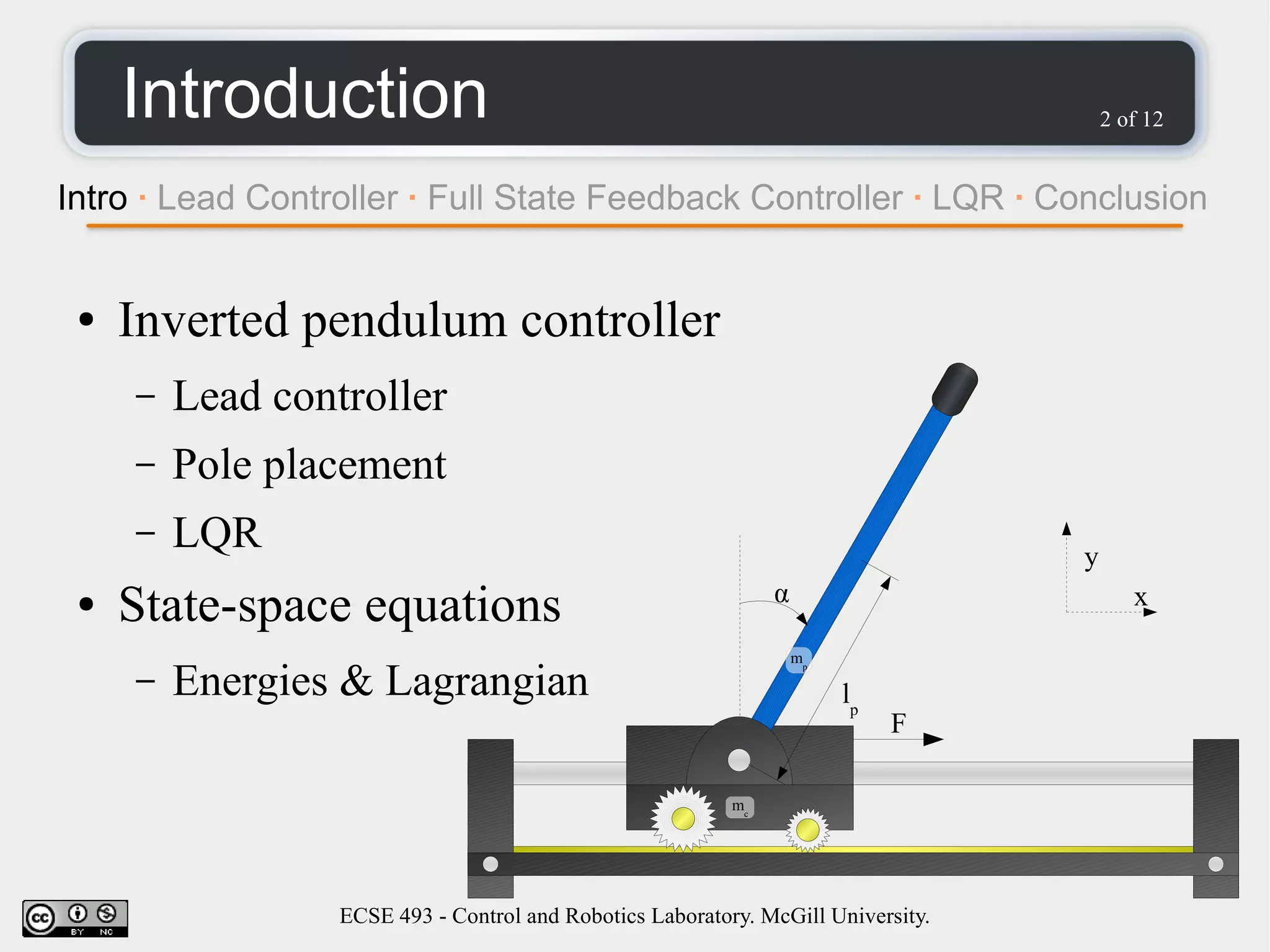
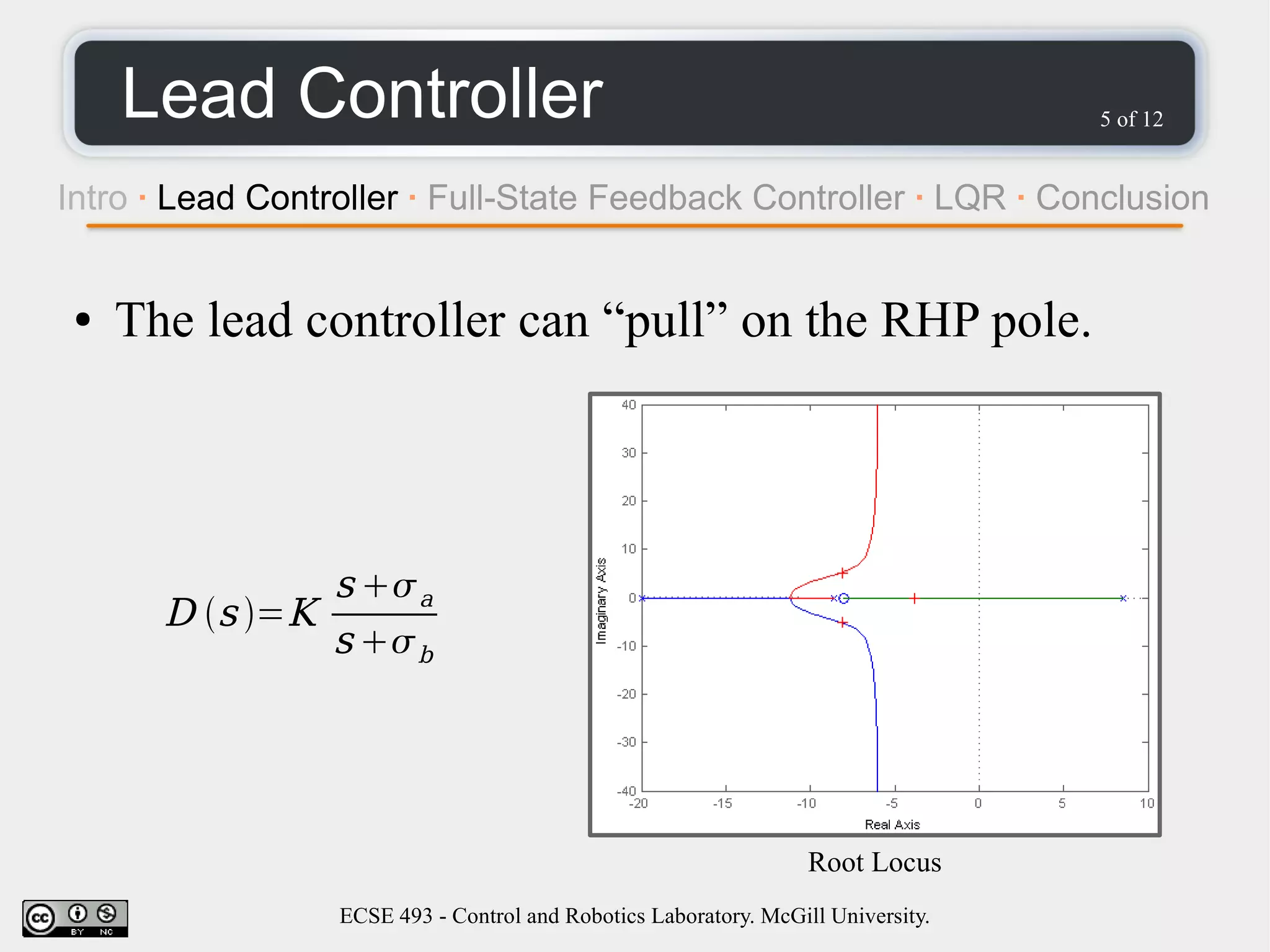
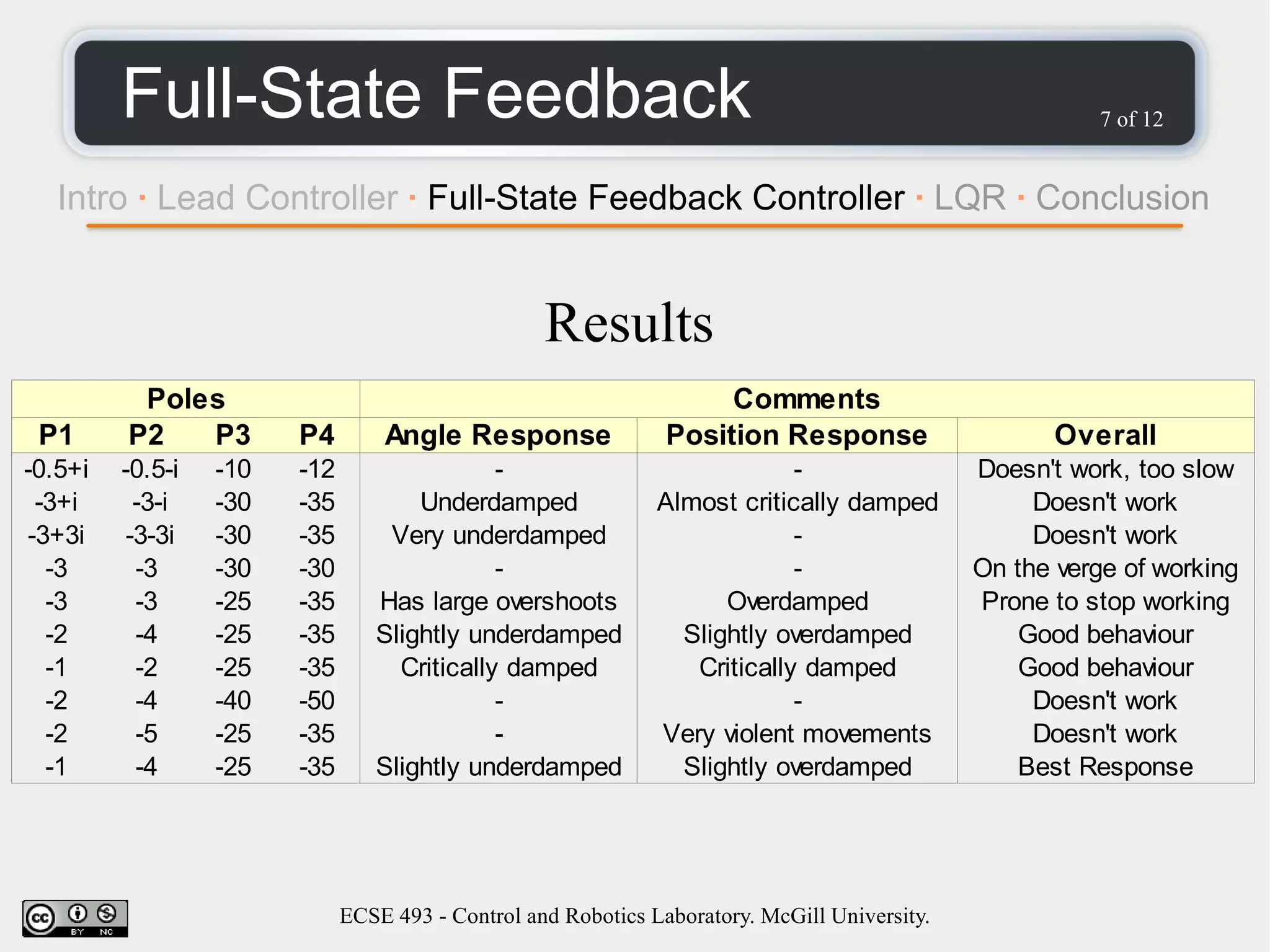
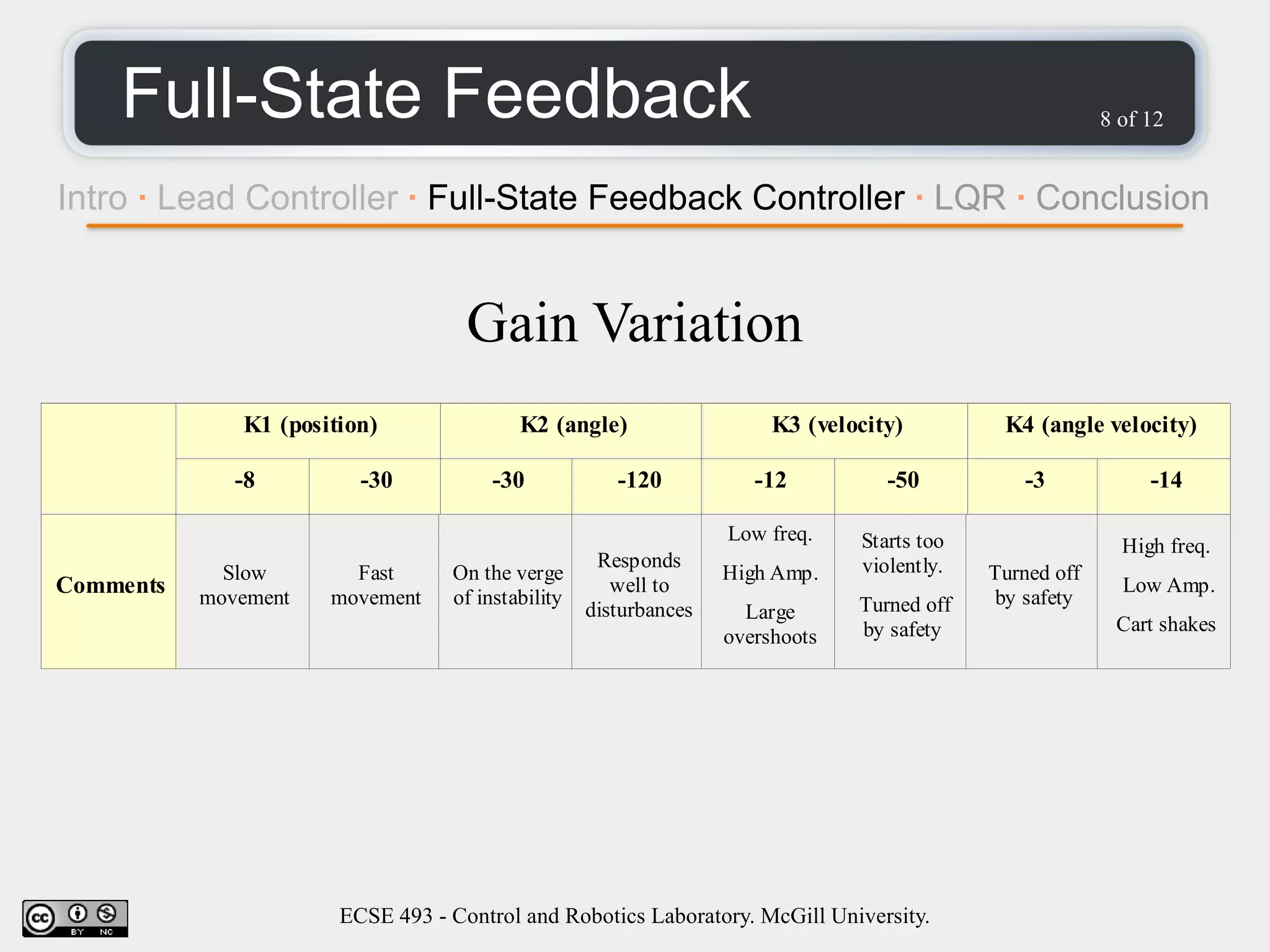
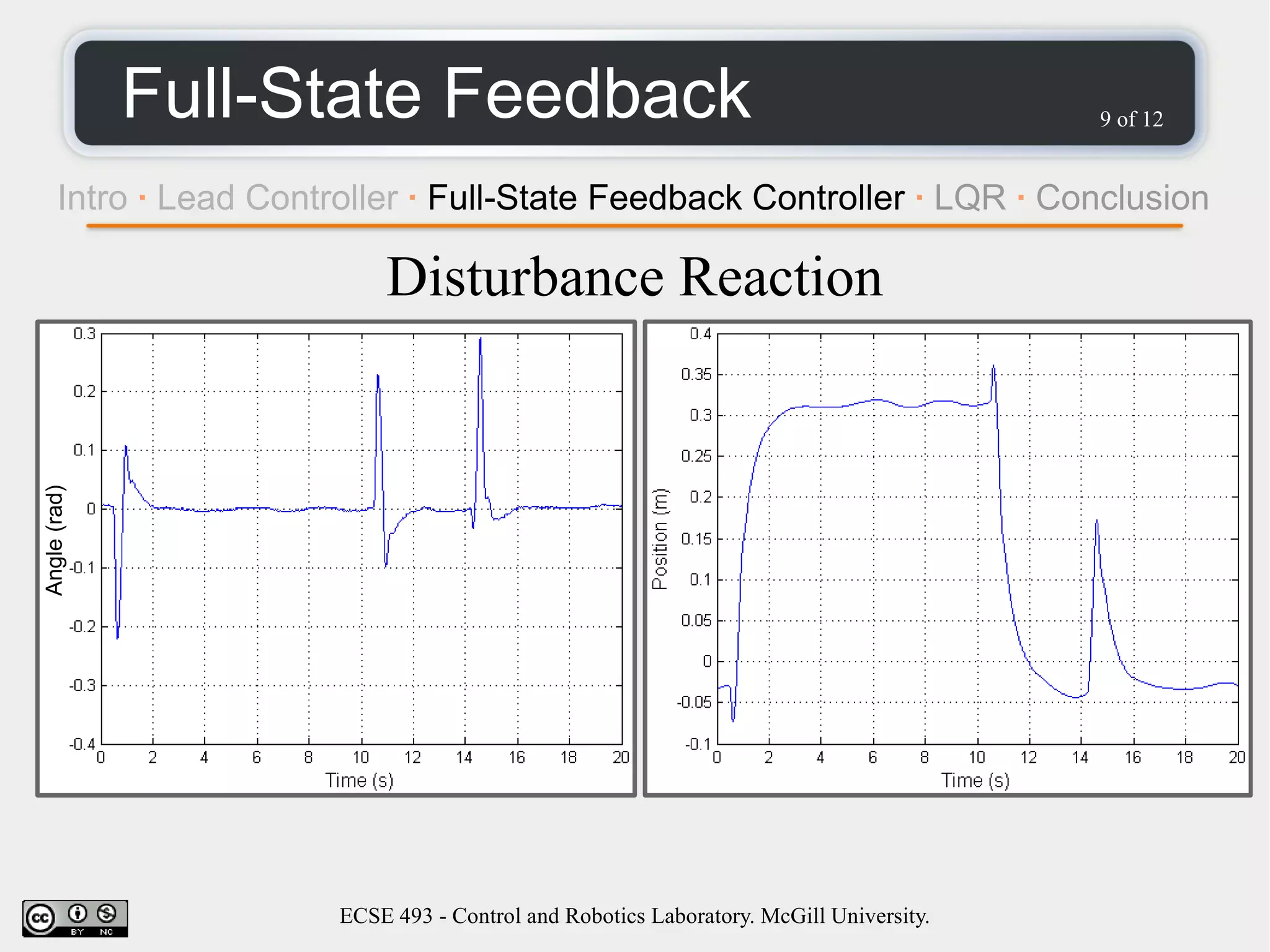
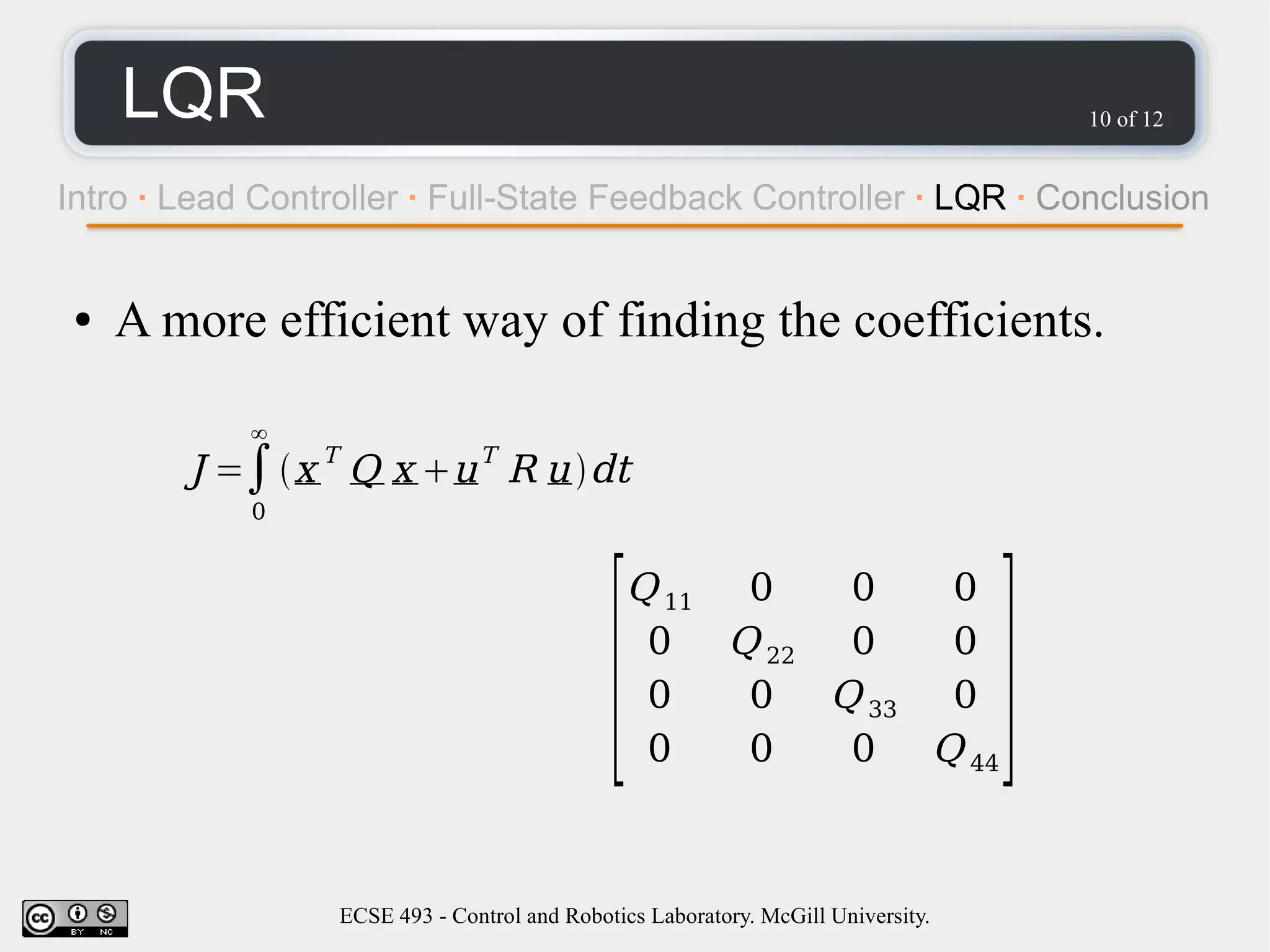
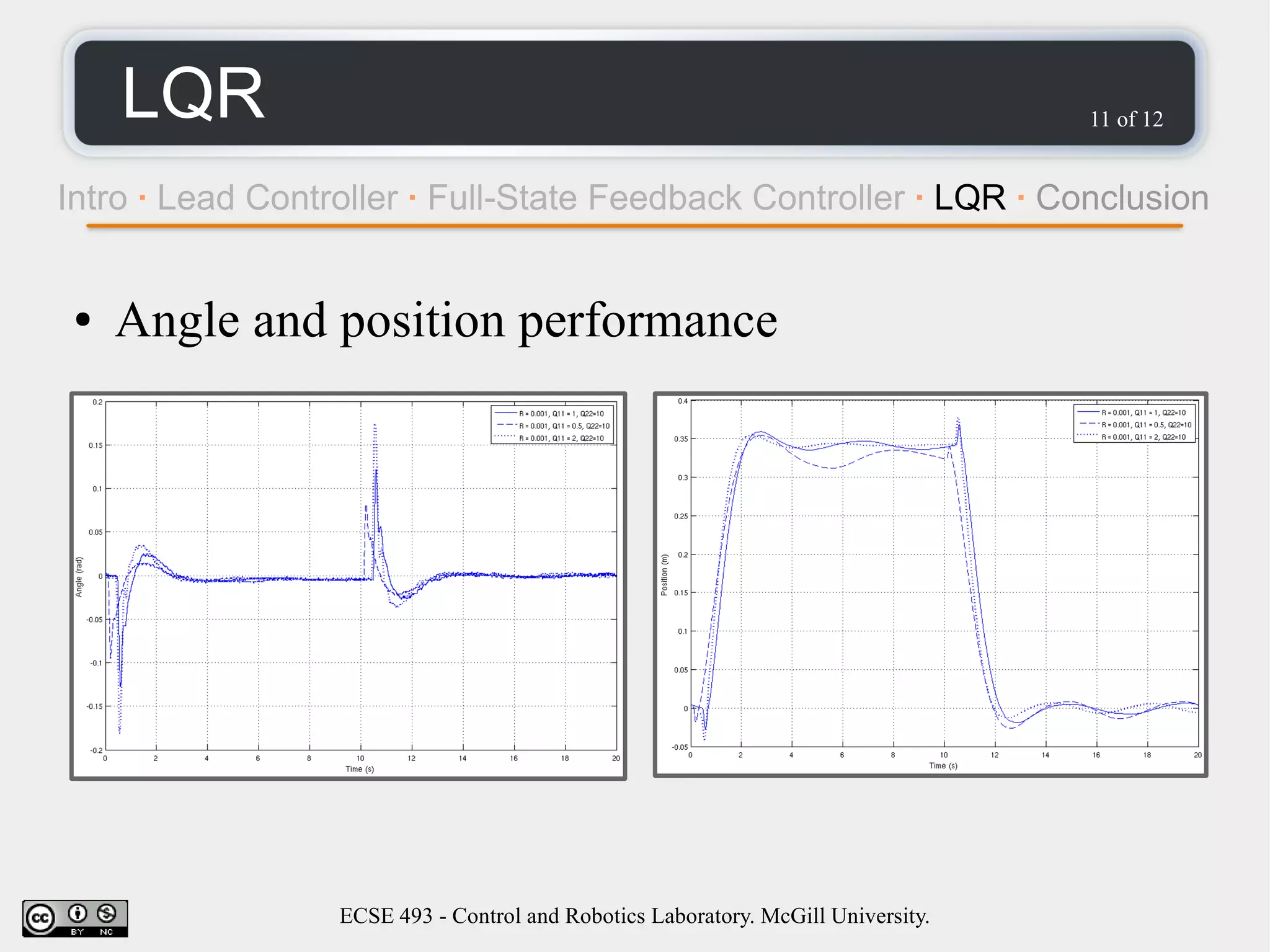

This document discusses different control methods for an inverted pendulum system, including a lead controller, full state feedback controller, and LQR controller. The full state feedback controller is able to place poles for good behavior but requires tuning multiple gain values. The LQR controller provides optimal control through minimizing costs and finds the gain coefficients in a more efficient way than full state feedback. Simulation results show the full state feedback and LQR controllers perform better than the lead controller in keeping the pendulum upright and being tolerant to disturbances.